Область техники, к которой относится изобретение
Настоящее изобретение относится к технике управления электрическими машинами, в частности машинами с коммутируемой магнитной индукцией, такими как коммутируемый индукционный электродвигатель.
Уровень техники
Коммутируемые индукционные электродвигатели стали широко популярны в последние годы. В коммутируемом индукционном электродвигателе статор имеет ряд полюсов, на которые последовательно подается питание, что обеспечивает поворот ротора на линию расположения той пары полюсов, на которую подано питание, под действием магнитного поля, возникающего в каждой паре полюсов. Быстро переключая различные пары полюсов, можно обеспечить вращение ротора на очень большой скорости.
Недавние исследования коммутируемых индукционных электродвигателей позволили создать электродвигатели с более высокими скоростями вращения ротора, чем были известны до настоящего времени. Однако управление ротором на таких больших скоростях может быть проблематичным. В частности, необходим точный контроль углового положения ротора, при котором на полюса подается и от полюсов отключается питание.
Ранее предлагалось разработать таблицы правил контроля, которые хранятся в памяти цепи управления электродвигателем. Такие таблицы правил контроля обычно представляют собой просмотровые таблицы со значениями углов включения и отключения полюсов для различных скоростей и крутящих моментов электродвигателя в широком диапазоне рабочих условий. Однако такие таблицы правил контроля содержат большое число данных, для хранения которых требуется большая память.
Сущность изобретения
Предметом настоящего изобретения является карта контроля для блока управления электрической машиной, имеющей ротор и, по крайней мере, одну электрическую фазовую обмотку, содержащую профиль заданных углов опережения, который отображает форму напряжения питания фазовой обмотки с учетом углового положения ротора в диапазоне скоростей вращения ротора, и коэффициент коррекции, который применяют по отношению к заданной части профиля углов опережения.
Настоящее изобретение позволяет управлять электродвигателем, используя меньший объем памяти, чем в блоках управления, применяемых до настоящего времени. Более того, изобретение позволяет изготавливать электродвигатели с большими изменениями допусков элементов, т.к. коэффициент коррекции компенсирует отклонения характеристик элементов.
Кроме того, предметом изобретения является способ получения карты контроля для блока управления машиной, имеющей ротор и, по крайней мере, одну электрическую фазовую обмотку, содержащий следующие этапы: получение профиля заданных углов опережения, который отображает форму напряжения питания фазовой обмотки с учетом углового положения ротора в диапазоне скоростей вращения ротора; запитывание обмотки в соответствии с профилем углов опережения и получение коэффициента коррекции, который применяют по отношению к заданной части карты контроля.
Изобретение дает возможность изготовить карту контроля, требующую меньшей памяти в сравнении с известными аналогами, поскольку необходимо запоминать только профиль угла опережения и коэффициент коррекции.
Карта контроля, содержащая коэффициент коррекции, может быть получена в ходе изготовления электродвигателя, причем эта карта хранится в долговременной памяти блока управления.
Коэффициент коррекции может быть передан на блок управления с помощью радиосигналов, что исключает использование электрических проводов для присоединения к блоку управления, размещенному внутри полости электродвигателя.
Далее будет описано изобретение на примере его осуществления со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
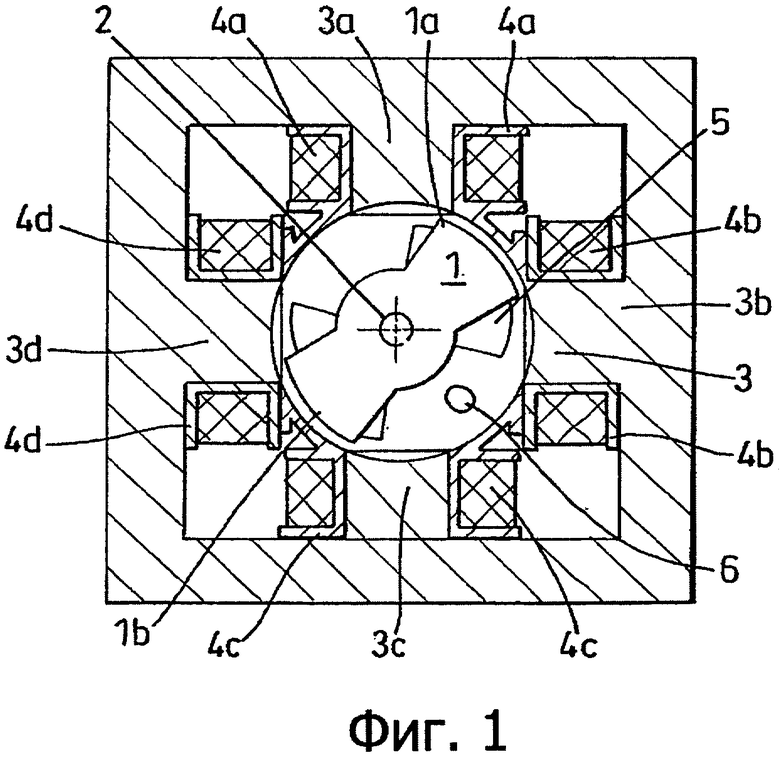
На фиг.1 показан типичный коммутируемый индукционный электродвигатель.
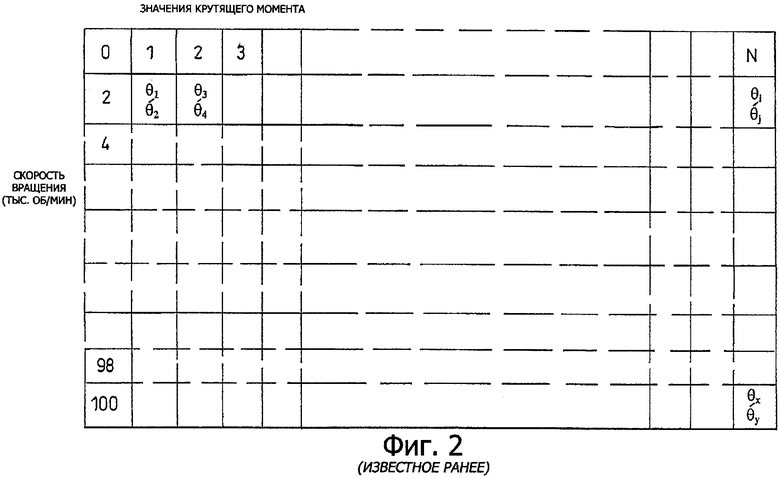
На фиг.2 показана известная карта правил контроля для электродвигателя по фиг.1.
На фиг.3 показана блок-схема устройства получения карты контроля для электродвигателя по фиг.1.
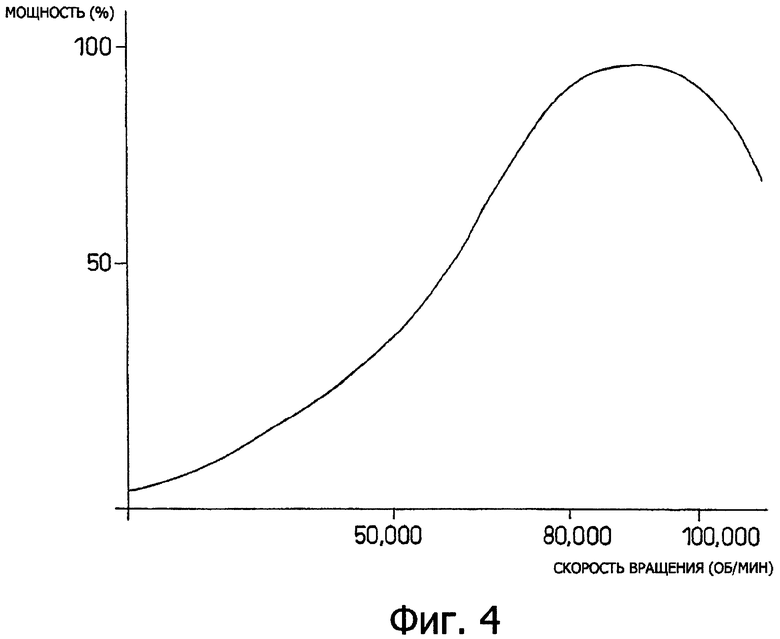
На фиг.4 показан профиль заданной входной мощности в диапазоне рабочих скоростей электродвигателя по фиг.1.
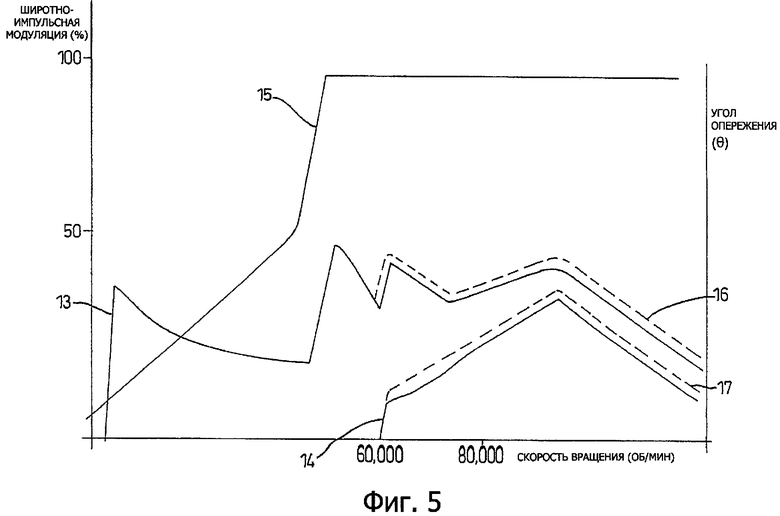
На фиг.5 показана карта контроля для управления электродвигателем по фиг.1.
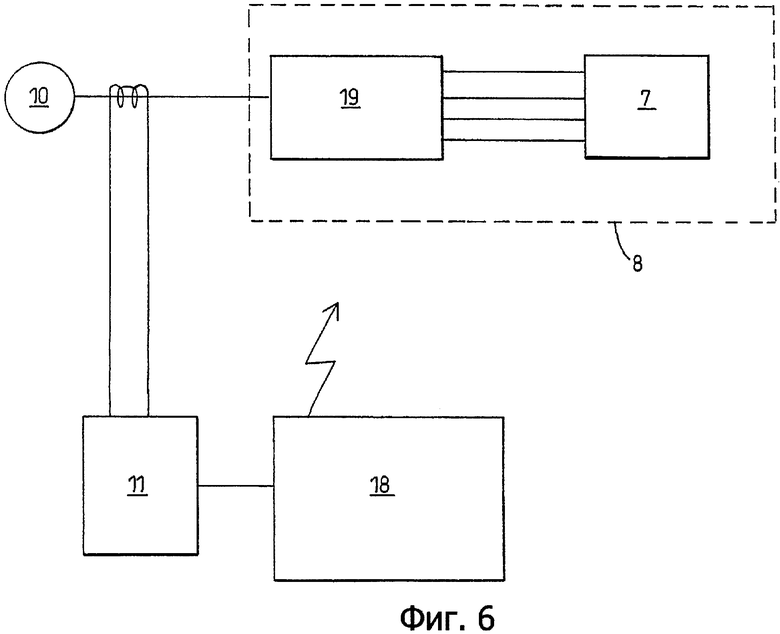
На фиг.6 показана блок-схема другого устройства получения карты контроля для электродвигателя по фиг.1.
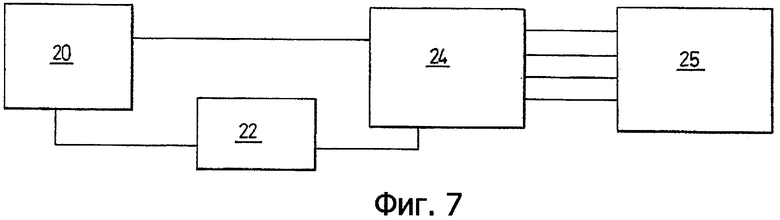
На фиг.7 показана блок-схема электродвигателя по фиг.1 и цепи управления.
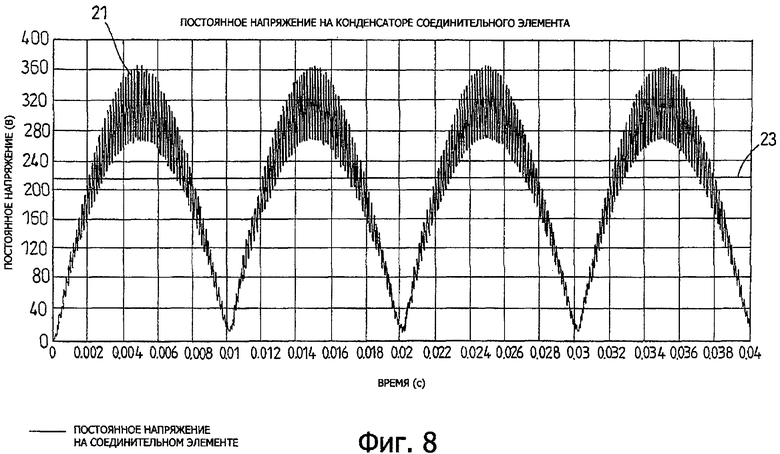
На фиг.8 показана типичная форма волны напряжения с соединительного элемента.
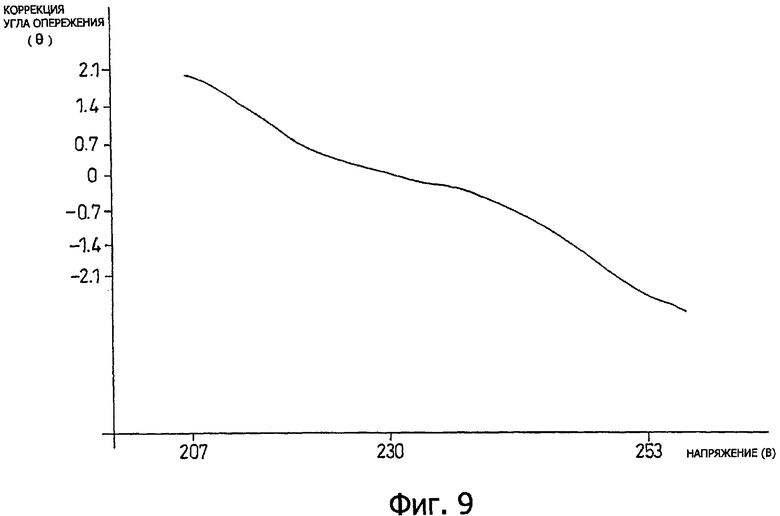
На фиг.9 показано соотношение между напряжением с соединительного элемента и коррекцией заданного угла опережения, при котором на фазовую обмотку подается питание.
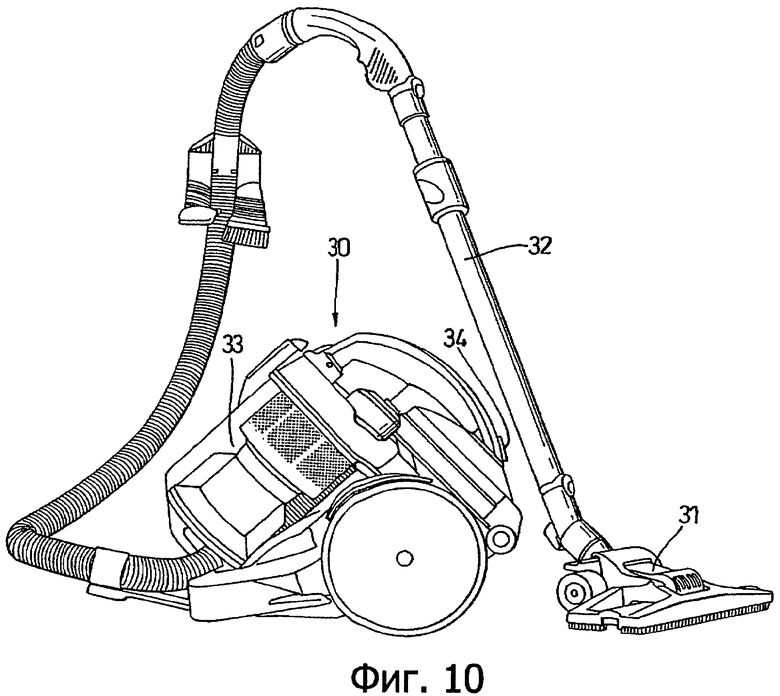
На фиг.10 показано устройство чистки на примере центробежного вакуумного пылесоса, в котором установлен электродвигатель по фиг.1.
На всех фигурах одинаковыми номерами обозначены одинаковые элементы.
Подробное описание изобретения
На фиг.1 показан разрез типичного коммутируемого индукционного электродвигателя. Он содержит ротор 1, установленный на валу 2, и статор 3. Ротор 1 содержит аксиально расположенный набор гладких стальных пластин, образующих пару полюсов 1а, 1в. Статор 3 содержит набор стальных пластин, расположенных таким образом, чтобы иметь, например, четыре выступающих вовнутрь полюса 3а, 3b, 3с и 3d. Каждый из противоположных полюсов 3а и 3с удерживает обмотку 4а, 4b, которые вместе образуют первую фазу. Другие противоположные полюса 3а и 3b аналогично приспособлены для соответствующих обмоток 4с и 4d, которые образуют вторую фазу. Каждая обмотка 4 содержит большое число витков (например, 50+ витков) изолированного электропровода, намотанного вокруг соответствующего полюса статора.
В ходе работы, для обеспечения вращения ротора управляют подачей питания на фазовые обмотки. Следовательно, принципиально важным является знание углового положения ротора относительно фазовых обмоток. Для этого в устройстве имеется средство определения положения ротора, в данном варианте осуществления изобретения представленное в виде кодирующего диска 5, источника света 6 и оптического датчика (не показан). Кодирующий диск 5 расположен между источником 6 и датчиком, причем плоскость диска строго перпендикулярна направлению света. Отверстие в диске обеспечивает прохождение света от источника к датчику. Поскольку кодирующий диск 5 вращается вместе с валом 2 узла ротора 1, свет от источника периодически прерывается. Таким образом, датчик света получает импульсный световой сигнал. Сигнал от оптического датчика передается на блок управления.
На малых скоростях управлять напряжением на фазовых обмотках относительно просто. Обычно это выполняют с использованием широтно-импульсной модуляции (PWM), которая подробно рассматривается ниже. Однако при возрастании скорости угловое положение ротора, при котором на обмотки подается напряжение (угол включения), может опережать заданное положение, так же как и угловое положение ротора, при котором от обмоток отключается напряжение (угол отключения). Угол включения должен быть опережающим, чтобы обеспечить нарастание тока в обмотках от нуля до требуемого значения до того момента, когда индукция начнет возрастать при сближении полюсов. Этот угол называют углом опережения включения. Аналогично, угол отключения должен быть опережающим, чтобы возникала возможность уменьшить ток до нуля до того момента, когда индукция начнет падать при удалении полюсов. Этот угол называют углом опережения отключения.
В обычном блоке управления коммутируемым индукционным электродвигателем карта правил контроля представляет собой просмотровую таблицу. Пример такой таблицы приведен на фиг.2. Таблица содержит ряд ячеек, хранящихся в памяти. Таблица показывает связь между скоростью вращения электродвигателя и заданным крутящим моментом, производимым электродвигателем. Обычно параметрами управления являются угол опережения включения и угол опережения отключения. При работе электродвигателя измеряют скорость и крутящий момент, и их значения подают на систему управления, которая вырабатывает просмотровую таблицу, позволяющую найти подходящие углы для управления подачей питания на фазовые обмотки, чтобы обеспечить требуемые значения скорости и крутящего момента.
Однако недостатком карты контроля этого типа является то, что она занимает большой объем памяти. Более того, если карта контроля прикладывается изготовителем к электродвигателю, то для получения непротиворечивых результатов эти электродвигатели должны иметь одинаковые рабочие характеристики. Следовательно, электродвигатели должны быть изготовлены из деталей, имеющих одинаковые характеристики и заданные допуски в отношении как физических, так и электрических свойств. Это обстоятельство, естественно, ведет к возрастанию стоимости электродвигателя. Альтернативным вариантом является разработка просмотровой таблицы из набора данных для каждого отдельного электродвигателя, что экономит время и снижает стоимость.
Получение карты контроля
Далее со ссылкой на фиг.3-5 будет описана карта контроля, решающая эту проблему, и способ получения карты контроля.
Блок-схема устройства, служащего для получения карты контроля, соответствующей настоящему изобретению, показана на фиг.3. Под номером 7 показан электродвигатель, который расположен в блоке 8 вместе с блоком управления 9. Устройство состоит из источника постоянного напряжения 10, которым может быть либо батарея, либо выпрямленное переменное напряжение. Постоянное напряжение, производимое источником 10, подается через электронный блок управления 9 на соединительный элемент постоянного тока и коммутируемые фазовые обмотки электродвигателя 7. В данном случае постоянное напряжение, подаваемое на коммутируемый индукционный электродвигатель (от батареи, либо от выпрямителя или иным способом), названо как «постоянное напряжение с соединительного элемента».
Блок управления 9 подключен к каждой фазовой обмотке электродвигателя 7 и управляет работой электродвигателя, подавая питание последовательно на фазовые обмотки. Измеритель мощности 11 подключен к соединительному элементу постоянного тока и служит для измерения входной мощности. Сигналы с измерителя мощности 11 подаются на вход блока контроля 12, с которого в свою очередь результаты измерения подаются на электронный блок управления 9.
На фиг.4 показан профиль входной мощности в диапазоне скоростей вращения электродвигателя. Этот профиль может быть задан с использованием моделирующего программного обеспечения, а также может быть получен для конкретной области применения электродвигателя. Например, профиль по фиг.4 был получен для электродвигателя пылесоса. Эта профиль показывает, что мощность стабильно растет с увеличением скорости до тех пор, пока не будет достигнута максимальная мощность при очень высоких скоростях вращения электродвигателя, от восьмидесяти тысяч до ста тысяч оборотов в минуту. При более высоких скоростях электродвигатель должен быть отключен, чтобы избежать его чрезмерного износа.
На фиг.5 показан заданный профиль в виде карты углов опережения. Этот профиль соответствует условиям идеальной работы электродвигателя. Линия, обозначенная цифрой 13, показывает изменение угла опережения отключения при увеличении скорости вращения электродвигателя. Линия, обозначенная цифрой 14, показывает соотношение между углом опережения включения и скоростью вращения ротора. Угол опережения включения не меняется до тех пор, пока электродвигатель не достигнет скорости, превышающей 60000 оборотов в минуту. На меньших скоростях управление питанием обмоток производится напряжением с широтно-импульсной модуляцией. Линия 15 на графике иллюстрирует процесс управления с использованием широтно-импульсной модуляции и показывает процент от длительности каждого цикла, в ходе которого на фазовой обмотке сохраняется напряжение. Например, на низких скоростях, порядка пяти тысяч оборотов в минуту, импульс напряжения действует в течение приблизительно 10% длительности цикла. Ширина импульса напряжения растет с ростом скорости вращения электродвигателя, и когда скорость достигнет пятидесяти тысяч оборотов в минуту, на обмотку поступают импульсы напряжения полной ширины.
Для того чтобы получить карту контроля, постоянное напряжение от источника 10 через блок управления 9 подается на электродвигатель 7. Величина подаваемого постоянного напряжения выбирается такой, чтобы соответствовать обычному рабочему напряжению, которое должно подаваться на электродвигатель через соединительный элемент постоянного тока. В данном примере электродвигателя для пылесоса постоянное напряжение соответствует напряжению сети питания, например 230В.
Скорость вращения электродвигателя выбирается такой, чтобы соответствовать заданной входной мощности из профиля зависимости мощности от скорости. Обычная скорость составляет 80000 об/мин, поскольку известно, что при этой скорости электродвигатель будет работать на полной мощности. С блока управления 9 импульсы напряжения подаются на обмотку в соответствии с профилем углов опережения по фиг.5, что позволяет разогнать электродвигатель до заданной скорости. Импульсы подаются в соответствии со значениями углов опережения включения и углов опережения отключения, хранящихся в профиле значений углов опережения.
Измеритель мощности 11 измеряет входную мощность и направляет соответствующий сигнал на блок контроля 12. Блок контроля 12 сравнивает измеренную входную мощность с заданной входной мощностью, даваемой профилем по фиг.4. Если имеется расхождение, блок управления выдает разностный сигнал на изменение как угла опережения включения, так и угла опережения отключения, и входная мощность измеряется заново. Снова, если имеется расхождение между значениями измеренной входной мощности и заданной входной мощности, углы опережения включения и отключения изменяются еще на один малый шаг. Обычный шаг изменения этих углов составляет примерно 0,7°. Этот процесс продолжается до тех пор, пока значения измеренной входной мощности и заданной входной мощности не станут одинаковыми. Когда это условие будет выполнено, суммарное изменение угла опережения запоминается в памяти блока управления как коэффициент коррекции. При работе электродвигателя этот коэффициент коррекции воздействует на значение заданной части профиля углов опережения, предпочтительно той части, которая учитывает углы опережения включения. Профили углов опережения с обычными коэффициентами коррекции, учитываемыми в данном варианте, показаны пунктирными линиями на фиг.5. Линия 16 показывает угол опережения отключения с добавленным к нему коэффициентом коррекции. Линия 17 показывает угол опережения включения с добавленным к нему коэффициентом коррекции.
В другом варианте угол опережения может изменяться на небольшие значения до тех пор, пока измеренное значение входной мощности находится в интервале заданных значений входной мощности.
Профили номинальных значений угла опережения и коэффициента коррекции хранятся в долговременной памяти блока управления. Количество запоминаемых данных обычно соответствует одному ряду данных обычной карты контроля, состоящей из просмотровых таблиц. Таким образом, карта контроля требует меньшего объема используемой памяти, благодаря чему снижается стоимость устройства. Кроме этого, эта память может быть использована и для других целей.
Другой вариант устройства приведен на фиг.6. В этом устройстве блок контроля 18 связан с блоком управления 19 по радиоканалу. В этом варианте коэффициент коррекции передается в запоминающее устройство блока управления 19 с помощью радиосигналов. Преимуществом этого устройства является отсутствие электрического соединения между блоком контроля и блоком управления, который установлен в корпусе 8 электродвигателя.
Компенсация напряжения
При использовании вышеупомянутой карты контроля предполагается, что напряжение, прикладываемое к обмоткам, является постоянным. Однако при работе устройства напряжение с соединительного элемента отличается от напряжения, при котором была получена карта контроля.
На фиг.7-9 показан способ компенсации изменений напряжения с соединительного элемента.
На фиг.7 показана блок-схема работы коммутируемого индукционного электродвигателя 25. На этой фигуре цифрой 20 обозначен блок преобразования мощности. При работе блок преобразования мощности 20 подключен к сети питания и подает выпрямленное и отфильтрованное напряжение на соединительный элемент. Подходящий преобразователь мощности описан в нашем патенте GB 0229873.5.
На фиг.8 линия 21 показывает пример напряжения, приложенного к соединительному элементу. Напряжение быстро изменяется со временем. Напряжение с соединительного элемента попадает на фильтр 22 фиг.7, который дает сглаженное среднее напряжение. На фиг.8 линия 23 обозначает типичное сглаженное напряжение с соединительного элемента. Это среднее напряжение с соединительного элемента подается на блок управления 24, в котором хранится карта значений компенсаций напряжения, подобная той, что показана на фиг.9.
Эта карта отражает связь между углом опережения и средним значением напряжения с соединительного элемента. Эта карта может быть получена экспериментальным путем, либо путем моделирования с использованием соответствующего программного обеспечения. Эта карта постоянно хранится в долговременном запоминающем устройстве блока управления 24. В данном примере угол опережения равен нулю при 230В. Причиной этого является то, что карта контроля получена при действии на обмотке постоянного напряжения 230В. Таким образом, карта контроля обеспечивает точное управление работой электродвигателя при данном напряжении. В этом примере угол опережения уменьшается при возрастании напряжения с соединительного элемента и наоборот.
Напряжение с соединительного элемента подается через фильтр, и блок управления 24 сохраняет в памяти значения напряжений, с тем чтобы изменить коэффициент коррекции для углов опережения, при которых на обмотку подается напряжение. Например, если измеренное напряжение составляет 207В, то блок управления выдает коррекцию угла опережения 2,1° для углов опережения включения и отключения. Таким образом, управление фазой питающего напряжения осуществляется просто и не требует использования датчиков для измерения таких характеристик электродвигателя, как крутящий момент и скорость вращения.
В данном устройстве нет необходимости запоминать взаимосвязь между напряжением и углом коррекции в таком виде, как она показана на фиг.9. Например, если эта взаимосвязь является линейной, то для квалифицированных технических специалистов не составит труда получить с блока управления заданный коэффициент коррекции угла опережения для каждого вольта, или части вольта, под действием которого напряжение с соединительного элемента изменяется.
Описанный выше способ компенсации напряжения может быть использован непрерывно, периодически или эпизодически, например, при запуске электродвигателя.
Можно заметить, что когда электродвигатель подключен к источнику питания, но не работает, напряжение с соединительного элемента выше ожидаемого, поскольку ток не проходит по цепи. Следовательно, коэффициент коррекции может запоминаться в чистом виде для корректировки углов опережения при запуске электродвигателя. Это может быть выполнено простым смещением коэффициента компенсации угла путем изменения величины заданного напряжения. Например, при напряжении с соединительного элемента 315В соответствующая корректировка угла опережения может составить 1,4°.
Дальнейшим улучшением является способ управления гистерезисом. Если измеренное значение напряжения с соединительного элемента быстро изменяется между двумя значениями, то соответственно будет стремиться измениться и коэффициент коррекции угла опережения. Блок управления может работать так, что напряжение изменяется на большую величину по сравнению с заданным приращением до того момента, когда на блок управления поступит новое значение напряжения, подлежащего коррекции, благодаря чему изменения угла опережения отстает от изменения напряжения. Например, если напряжение на соединительном элементе возрастает от 230В до 232В, то блок управления может быть устроен так, что ждет до момента, пока напряжение не возрастет до 234В, после чего производит корректировку угла опережения.
Настоящее изобретение применимо для коммутируемого индукционного электродвигателя и, в частности, полезно для двигателей, работающих на высоких скоростях, таких как 100000 оборотов в минуту. На фиг.10 показан пылесос 30, в котором используется коммутируемый индукционный электродвигатель. Двигатель служит для вращения вентилятора на очень большой скорости. За счет всасывающего эффекта вентилятора грязный воздух попадает в пылесос через отверстие 31 и рукав 32. Грязный воздух попадает в сепаратор 33, который служит для отделения грязи и пыли от грязного воздуха. В качестве сепаратора 33 может использоваться центробежный сепаратор, как показано здесь, или другой вид сепаратора. Очищенный воздух покидает сепаратор 33 и попадает в корпус электродвигателя, расположенный внутри главного корпуса 34 пылесоса. До вентилятора перед мотором на пути воздушного потока обычно устанавливают фильтр, служащий для отделения частиц, которые не отделяются сепаратором 33. После мотора на пути воздушного потока может быть установлен фильтр. Однако при использовании электродвигателя без щеток требования к такому фильтру снижаются. Очищенный воздух затем выходит из пылесоса в атмосферу через выпускное отверстие.
Изменения описанных выше предпочтительных вариантов осуществления изобретения могут быть очевидны специалистам в данной области техники, и эти изменения не меняют сущности изобретения. Например, хотя описан электродвигатель, имеющий статор с четырьмя полюсами, ротор с двумя полюсами, изобретение может быть применимо к электродвигателям с другим числом полюсов на статоре и роторе, а также к электродвигателям других размеров.
Изобретение равно применимо к электродвигателям и генераторам, необязательно коммутируемого индукционного типа, а также может быть использовано в иных устройствах кроме пылесоса, таких как газонокосилки, кондиционеры, фены и водяные насосы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2005 |
|
RU2342763C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2003 |
|
RU2320069C2 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОПРИВОД ДЛЯ ШВЕЙНЫХ МАШИН | 1994 |
|
RU2073759C1 |
| СХЕМА И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2017 |
|
RU2660963C1 |
| ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ | 2012 |
|
RU2592264C2 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2273944C2 |
Изобретение относится к области электротехники и может быть использовано для управления электрическими машинами, как с коммутируемой магнитной индукцией, так и некоммутируемой магнитной индукцией, применяемыми в бытовой технике. Техническим результатом является упрощение процесса управления электрическими машинами, работающими на высоких скоростях, таких как 100000 оборотов в минуту. Электрическая машина такая, как коммутируемый индукционный электродвигатель, имеет ротор и, по крайней мере, одну электрическую фазовую обмотку. При изготовлении двигателя получают карту контроля, содержащую профиль заданных углов опережения, который отображает форму напряжения питания фазовой обмотки с учетом углового положения ротора в диапазоне скоростей вращения ротора. Эти данные хранятся в памяти блока управления вместе с коэффициентом коррекции угла, который применяют по отношению к заданной части профиля углов опережения. Коэффициент коррекции угла компенсирует разницу между заданной входной мощностью и измеренной входной мощностью. Коэффициент коррекции может передаваться на блок управления с помощью радиосигналов. 9 з.п. ф-лы, 10 ил.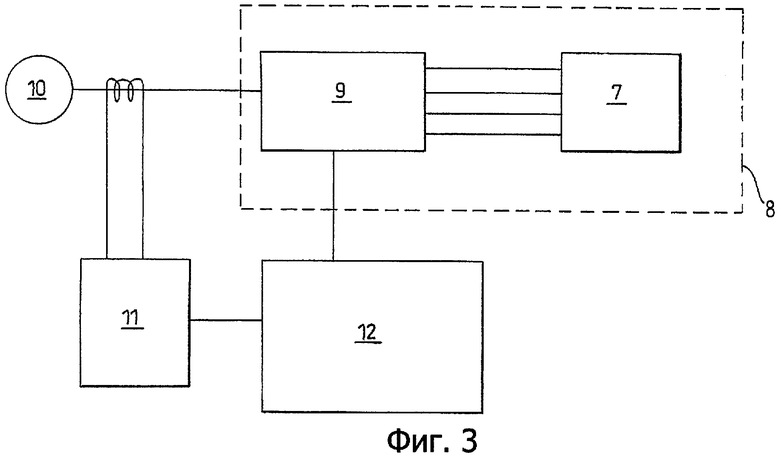
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| Устройство для управления вентильным электродвигателем | 1988 |
|
SU1676054A1 |
| GB 12699434 А, 06.04.1972 | |||
| US 6222335 В1, 24.04.2001 | |||
| Способ потенциометрического определения содержания фтора в цементных материалах | 1983 |
|
SU1239581A1 |

