УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к схеме и способу управления этой схемой.
2. Описание предшествующего уровня техники
[0002] Известен коммутируемый реактивный электродвигатель, включающий в себя статор, имеющий множество явновыраженных полюсов, ротор, имеющий множество явновыраженных полюсов, которые выполнены с возможностью поворачиваться к явновыраженным полюсам статора, и множество обмоток, соответственно намотанных вокруг явновыраженных полюсов статора. Коммутируемый реактивный электродвигатель обеспечивает вращение ротора посредством силы магнитного притяжения, генерируемой между явновыраженными полюсами статора и ротора.
[0003] В работе Motoki Takeno и четырех других авторов ʺImprovement of torque characteristic of a 50kW SRM for HEV with a consideration of magnetic saturation of stator yokeʺ, The Japan Society of Applied Electromagnetics and Mechanics, Vol. 19, No. 2, June 2011, рассмотрены результаты сравнения между характеристиками крутящего момента двух структур намотки (намотки NNNSSS и намотки NSNSNS) применительно к коммутируемому реактивному электродвигателю, который подобен описанному выше. В этом документе говорится, что, поскольку намотка NSNSNS по сравнению с намоткой NNNSSS не является легко подверженной магнитному насыщению, максимальный крутящий момент намотки NSNSNS оказывается больше, чем максимальный крутящий момент намотки NNNSSS.
Сущность изобретения
[0004] В упомянутой работе Motoki Takeno и четырех других авторов ʺImprovement of torque characteristic of a 50kW SRM for HEV with a consideration of magnetic saturation of stator yokeʺ, The Japan Society of Applied Electromagnetics and Mechanics, Vol. 19, No. 2, June 2011, предложено повысить максимальный крутящий момент коммутируемого реактивного электродвигателя за счет применения намотки NSNSNS. Однако эффективность по крутящему моменту (называемая далее просто «кпд») каждой из намотки NNNSSS и намотки NSNSNS изменяется согласно состоянию нагрузки коммутируемого реактивного электродвигателя. Поэтому, если намотку NSNSNS применяют только из соображений повышения максимального крутящего момента, существует вероятность того, что это обусловит снижение кпд.
[0005] В изобретении предложено повышение максимального крутящего момента коммутируемого реактивного электродвигателя без снижения кпд коммутируемого реактивного электродвигателя.
[0006] В первом аспекте изобретения, предложена схема. Эта схема включает в себя коммутируемый реактивный электродвигатель, схему коммутации, и электронный блок управления. Коммутируемый реактивный электродвигатель выполнен с возможностью приведения в действие, когда по обмоткам трех фаз текут токи возбуждения. Схема коммутации соединена с коммутируемым реактивным электродвигателем. Схема коммутации выполнена с возможностью осуществления коммутации первой структуры намотки и второй структуры намотки. Первая структура намотки представляет собой структуру намотки, в которой обмотки трех фаз намотаны в одном и том же направлении. Вторая структура намотки представляет собой структуру намотки, в которой обмотки двух фаз из числа обмоток трех фаз намотаны в одном и том же направлении, остающаяся обмотка одной фазы намотана в противоположном направлении, а обмотки двух фаз с одним и тем же направлением намотки и обмотка одной фазы с противоположным направлением намотки расположены в чередующемся порядке. Электронный блок управления выполнен с возможностью осуществления коммутации схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет первую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в первом диапазоне на стороне нагрузки, меньшей чем граничное значение. Граничное значение делит диапазон приведения в действие коммутируемого реактивного электродвигателя на первый диапазон и второй диапазон. Электронный блок управления выполнен с возможностью осуществления коммутации схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет вторую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся во втором диапазоне, отличающемся от первого диапазона. Диапазон приведения в действие коммутируемого реактивного электродвигателя представляет собой диапазон, который определяется крутящим моментом и скоростью вращения коммутируемого реактивного электродвигателя. Крутящий момент и скорость вращения коммутируемого реактивного электродвигателя определяются в соответствии с прикладываемым напряжением.
[0007] При вышеописанной конфигурации, осуществляя коммутацию, обеспечивающую переход на первую структуру намотки в диапазоне низкой нагрузки, и осуществляя коммутацию, обеспечивающую переход на вторую структуру намотки, в диапазоне, отличающемся от диапазона низкой нагрузки, т.е., диапазоне высокой нагрузки, можно осуществить коммутацию, обеспечивающую переход на структуру намотки, которая является оптимальной по кпд, в соответствии с состоянием нагрузки коммутируемого реактивного электродвигателя.
[0008] В вышеописанной схеме, когда напряжение, прикладываемое к коммутируемому реактивному электродвигателю, оказывается низким, второй диапазон может быть шире, чем второй диапазон, когда напряжение, прикладываемое к коммутируемому реактивному электродвигателю, оказывается высоким.
[0009] При вышеописанной конфигурации, коммутация, обеспечивающая переход на оптимальную структуру намотки, возможна также с учетом того, что эффективный диапазон в каждой из структур намотки изменяется в зависимости от напряжения.
[0010] В вышеописанной схеме, электронный блок управления может быть выполнен с возможностью не выполнять коммутацию схемы коммутации, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в диапазоне нечувствительности. Диапазон нечувствительности может представлять собой диапазон, находящийся на границе между первым диапазоном и вторым диапазоном.
[0011] При вышеописанной конфигурации, предусматривая диапазон нечувствительности, можно подавить, например, потери из-за частой коммутации структуры намотки.
[0012] В вышеописанной схеме, схема коммутации может включать в себя схемы коммутации для множества фаз.
[0013] При вышеописанной конфигурации, поскольку множество схем коммутации управляют операциями коммутации, оказывается возможным, например, распределение нагрузки инвертора благодаря частой коммутации структуры намотки.
[0014] В вышеописанной схеме, длительность возбуждения первой структуры намотки может быть большей, чем длительность возбуждения второй структуры намотки.
[0015] При вышеописанной конфигурации, устанавливая длительность возбуждения первой структуры намотки, в которой увеличение тока происходит медленнее, чем во второй структуре намотки, большей, чем длительность возбуждения второй структуры намотки, можно предотвратить дефицит крутящего момента, когда происходит коммутация структуры намотки на первую структуру намотки.
[0016] В вышеописанной схеме, электронный блок управления может быть выполнен с возможностью обеспечивать фазу угла начала возбуждения первой структуры намотки, опережающую фазу угла начала возбуждения второй структуры намотки.
[0017] При вышеописанной конфигурации, период возбуждения первой структуры намотки может быть больше, чем период возбуждения второй структуры намотки.
[0018] Во втором аспекте изобретения, предложен способ управления схемой. Схема включает в себя коммутируемый реактивный электродвигатель, схему коммутации и электронный блок управления. Коммутируемый реактивный электродвигатель выполнен с возможностью приведения в действие, когда по обмоткам трех фаз текут токи возбуждения. Схема коммутации соединена с коммутируемым реактивным электродвигателем. Схема коммутации выполнена с возможностью коммутации первой структуры намотки и второй структуры намотки. Первая структура намотки представляет собой структуру намотки, в которой обмотки трех фаз намотаны в одном и том же направлении. Вторая структура намотки представляет собой структуру намотки, в которой обмотки двух фаз из числа обмоток трех фаз намотаны в одном и том же направлении, остающаяся обмотка одной фазы намотана в противоположном направлении, а обмотки двух фаз с одним и тем же направлением намотки и обмотка одной фазы с противоположным направлением намотки расположены в чередующемся порядке. Способ управления заключается в том, что: коммутируют посредством электронного блока управления схему коммутации таким образом, что коммутируемый реактивный электродвигатель имеет первую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в первом диапазоне на стороне нагрузки, меньшей чем граничное значение; и коммутируют посредством электронного блока управления схему коммутации таким образом, что коммутируемый реактивный электродвигатель имеет вторую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся во втором диапазоне, отличающемся от первого диапазона. Граничное значение делит диапазон приведения в действие коммутируемого реактивного электродвигателя (1) на первый диапазон и второй диапазон. Диапазон приведения в действие коммутируемого реактивного электродвигателя представляет собой диапазон, который определяется крутящим моментом и скоростью вращения коммутируемого реактивного электродвигателя. Крутящий момент и скорость вращения коммутируемого реактивного электродвигателя определяются в соответствии с прикладываемым напряжением.
[0019] При вышеописанной конфигурации, можно повысить максимальный крутящий момент коммутируемого реактивного электродвигателя без снижения кпд коммутируемого реактивного электродвигателя, осуществляя коммутацию на первую структуру намотки в диапазоне низкой нагрузки и осуществляя коммутацию на вторую структуру намотки в диапазоне, отличающемся от диапазона низкой нагрузки, т.е., диапазоне высокой нагрузки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Признаки, преимущества, а также техническая и промышленная значимость возможных вариантов осуществления изобретения будут описаны ниже со ссылками на прилагаемые чертежи, где сходные позиции обозначают сходные элементы, и при этом:
на фиг.1 представлен чертеж, схематически иллюстрирующий конфигурацию системы, включающую в себя устройство управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.2 представлен чертеж, схематически иллюстрирующий конфигурацию коммутируемого реактивного электродвигателя в случае наличия устройства управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.3 представлен чертеж, схематически иллюстрирующий конфигурацию схемы инвертора в устройстве управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.4 представлен чертеж, иллюстрирующий магнитные полюса, когда происходит коммутация структуры намотки на намотку NNNSSS в устройстве управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.5 представлен чертеж, иллюстрирующий магнитные полюса, когда происходит коммутация структуры намотки на намотку NSNSNS в устройстве управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.6 представлен график, иллюстрирующий зависимость между крутящим моментом и кпд в каждой структуре намотки;
на фиг.7 представлен график, иллюстрирующий форму кривой тока в каждой структуре намотки;
на фиг.8 представлен график, иллюстрирующий потери в железе и потери в меди в каждой структуре намотки;
на фиг.9 представлена схема последовательности операций, иллюстрирующая один пример способа управления приведением в действие посредством устройства управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
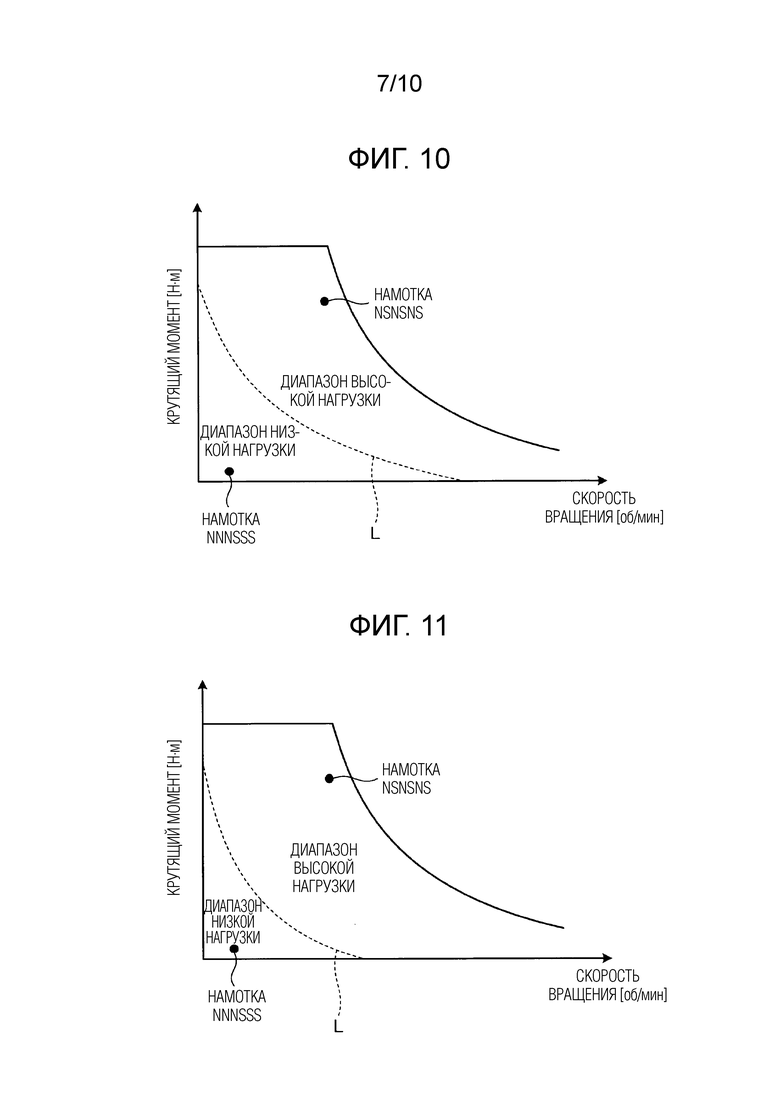
на фиг.10 представлен график, иллюстрирующий характеристики коммутируемого реактивного электродвигателя, когда высокое напряжение (600 В) прикладывается к коммутируемому реактивному электродвигателю в случае наличия устройства управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.11 представлен график, иллюстрирующий характеристики коммутируемого реактивного электродвигателя, когда низкое напряжение (300 В) прикладывается к коммутируемому реактивному электродвигателю в случае наличия устройства управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
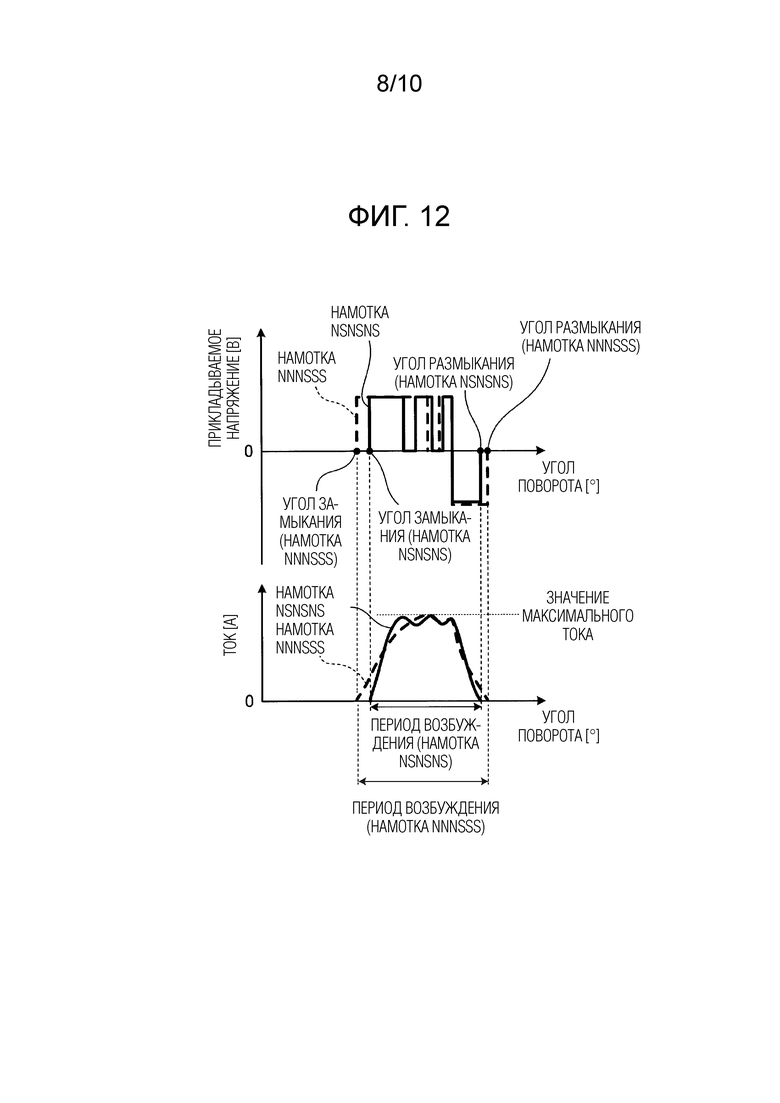
на фиг.12 представлен график, иллюстрирующий условия возбуждения и форму кривой тока для каждой структуры намотки в устройстве управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
на фиг.13 представлена скелетная схема, иллюстрирующая транспортное средство, к которому применимо устройство управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения;
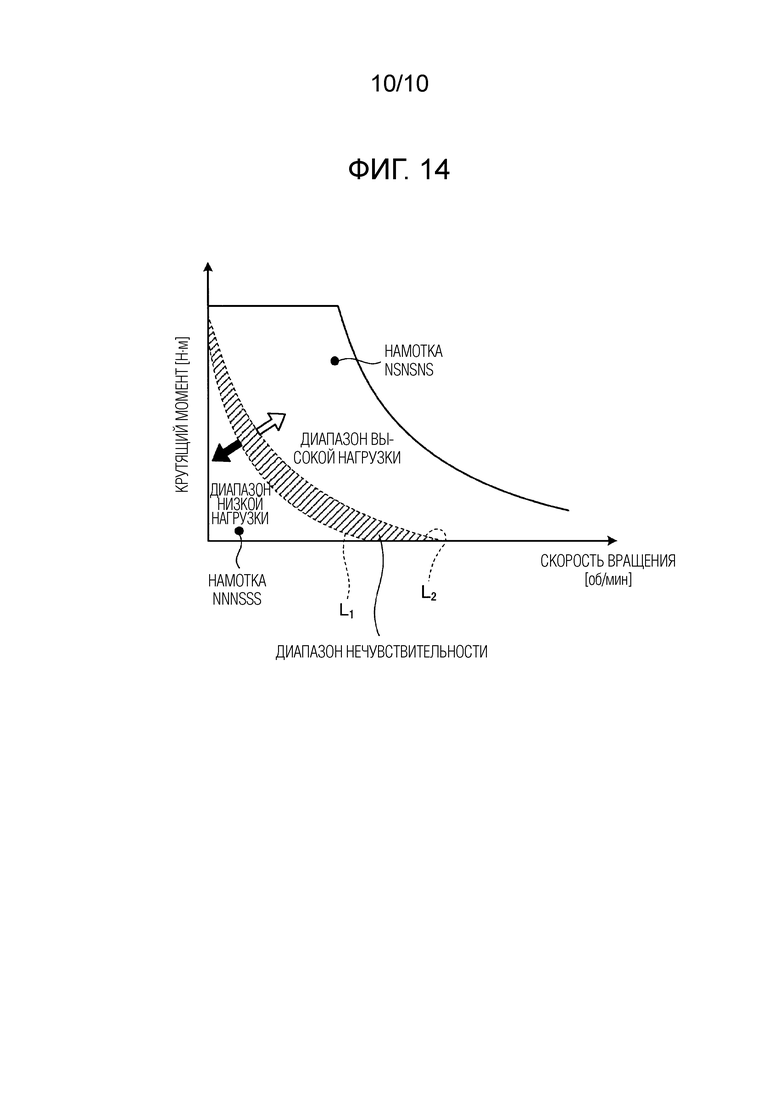
на фиг.14 представлен график, иллюстрирующий характеристики каждой структуры намотки в устройстве управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения, при этом диапазон нечувствительности предусмотрен на границе между диапазоном низкой нагрузки и диапазоном высокой нагрузки.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0021] Устройство управления коммутируемым реактивным электродвигателем в соответствии с вариантом осуществления изобретения будет описано со ссылками на прилагаемые чертежи. Изобретение не ограничивается вариантом осуществления, описываемым ниже. Кроме того, компоненты в нижеследующем варианте осуществления можно заменить компонентами, которые очевидны для специалистов в данной области техники, или которые являются, по существу, такими же, как компоненты в нижеследующем варианте осуществления.
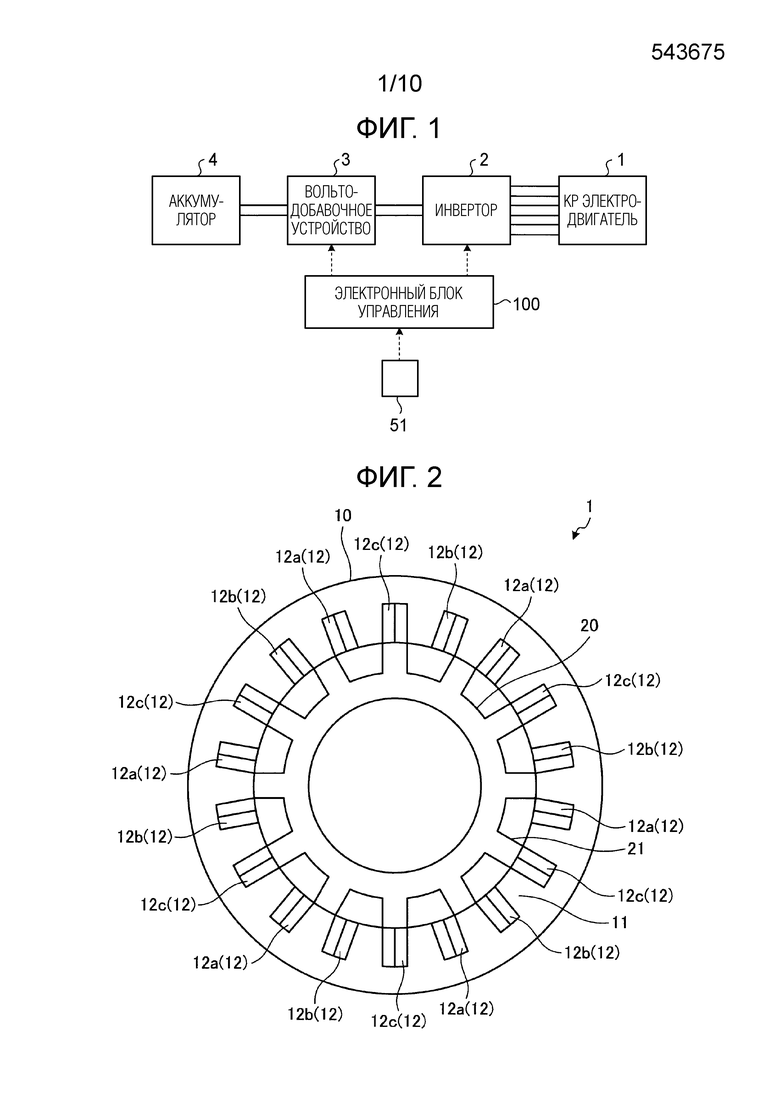
[0022] Как показано на фиг.1, конфигурация системы согласно этому варианту осуществления включает в себя коммутируемый реактивный электродвигатель (называемый далее «КР электродвигателем») 1, инвертор 2, вольтодобавочное устройство 3, аккумулятор 4 и электронный блок 100 управления. Устройство управления КР электродвигателя 1 в соответствии с этим вариантом осуществления включает в себя, по меньшей мере, инвертор 2 и электронный блок 100 управления.
[0023] Как показано на фиг.1, КР электродвигатель 1 электрически соединен с аккумулятором 4 посредством инвертора 2 и вольтодобавочного устройства 3. КР электродвигатель 1 и инвертор 2 электрически соединены друг с другом посредством обмоток 12 (см. фиг.2). КР электродвигатель 1 функционирует не только как электрический двигатель, но и как электрический генератор.
[0024] КР электродвигатель 1 представляет собой электрический двигатель, в роторе которого не применяется постоянный магнит и привод которого осуществляется за счет протекания токов возбуждения по обмоткам трех фаз 12. Как показано на фиг.2, КР электродвигатель 1 включает в себя статор 10 с явновыраженными полюсами, и ротор 20 с явновыраженными полюсами. На фиг.2, в качестве КР электродвигателя 1 показан - как пример - трехфазный асинхронный электродвигатель, включающий в себя 18-типолюсный статор 10 и 12-полюсный ротор 20.
[0025] КР электродвигатель 1, работающий на трехфазном переменном токе, имеет фазу A (фазу U), образованную парой зубцов 11 статора и соответствующими обмотками 12a, фазу B (фазу V), образованную парой зубцов 11 статора и соответствующими обмотками 12b, и фазу C (фазу W), образованную парой зубцов 11 статора и соответствующими обмотками 12c.
[0026] Как показано на фиг.2, статор 10 включает в себя множество зубцов 11 статора в качестве явновыраженных полюсов на его кольцевом внутреннем сферическом участке. Обмотки 12, соединенные с инвертором 2, соответственно намотаны вокруг зубцов 11 статора.
[0027] Ротор 20 расположен радиально внутри статора 10 и включает в себя множество зубцов 21 ротора в качестве явновыраженных полюсов на его кольцевом внешнем сферическом участке. Ротор 20 выполнен с возможностью вращения вместе с валом ротора (не показан).
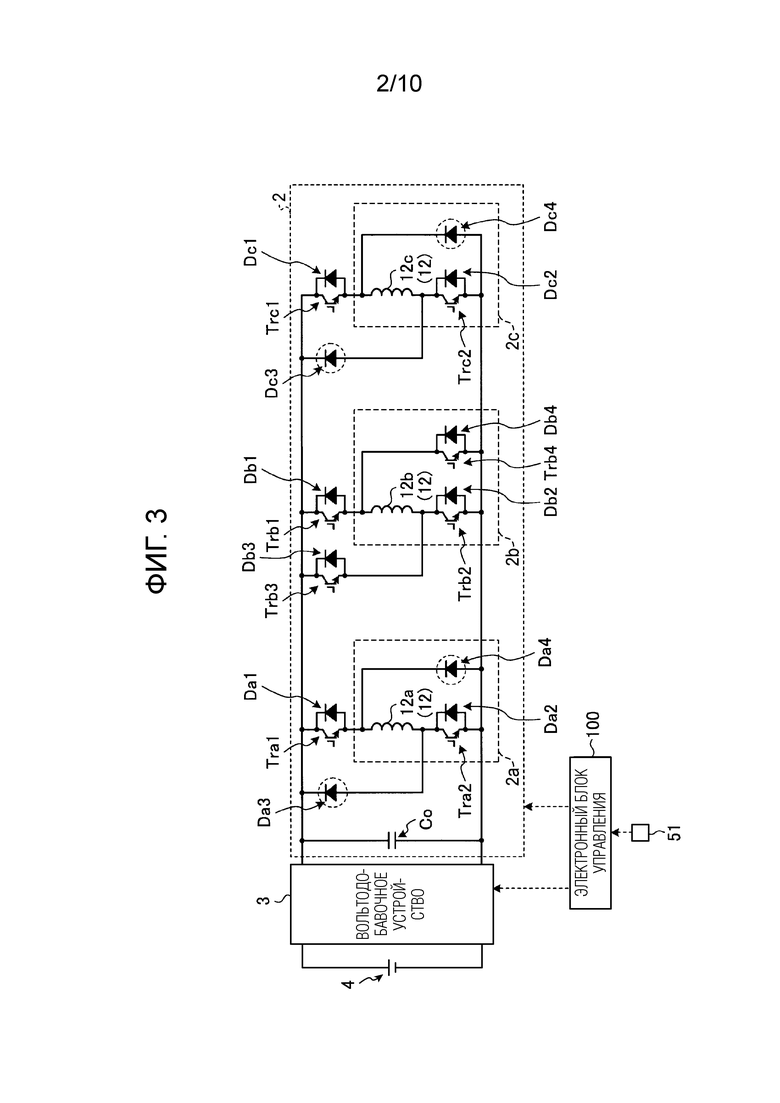
[0028] Как показано на фиг.3, инвертор 2 образован электрической схемой (схемой инвертора), включающей в себя множество коммутирующих элементов для подачи трехфазных токов в обмотки 12. Инвертор 2 подает фазный ток в обмотки 12, соединенные со схемой инвертора.
[0029] Схема инвертора, составляющая инвертор 2, включает в себя два транзистора и четыре диода на фазу и один конденсатор Co. Для каждой фазы, инвертор 2 одновременно включает или выключает оба транзистора, чтобы изменить значение тока, который течет по обмоткам 12.
[0030] Для фазы A, инвертор 2 включает в себя транзисторы Tra1 и Tra2 и диоды Da1, Da2, Da3 и Da4. Для фазы B, инвертор 2 включает в себя транзисторы Trb1 и Trb2, диоды Db1, Db2, Db3 и Db4. Для фазы C, инвертор 2 включает в себя транзисторы Trc1, Trc2 Trc3 и Trc4, и диоды Dc1, Dc2, Dc, и Dc4. Участок 2a, участок 2b, и участок 2c на фиг.3 соответственно иллюстрируют участки электрических схем, образующих фазу A, фазу B, и фазу C. Участки 2a, 2b, и 2c будут пояснены позже.
[0031] Между инвертором 2 и аккумулятором 4 предусмотрено вольтодобавочное устройство 3, которое повышает напряжение, прикладываемое к КР электродвигателю 1. Вольтодобавочное устройство 3 образовано, например, повышающим преобразователем.
[0032] Электронный блок 100 управления управляет приведением в действие КР электродвигателя 1. Электронный блок 100 управления включает в себя центральный процессор (ЦП), модуль памяти, хранящий данные, такие как различные программы, и модуль управления, который проводит различные вычисления для управления приведением в действие КР электродвигателя 1. В результате вычислений в модуле управления, из электронного блока 100 управления в инвертор 2 выдается сигнал команды управления инвертором 2. Таким образом, управляя инвертором 2, электронный блок 100 управления управляет напряжением и током возбуждения, прикладываемым к КР электродвигателю 1. Как будет описано позже, электронный блок 100 управления переключает структуру намотки КР электродвигателя 1 путем управления инвертором 2 (см. фиг.4-5).
[0033] В электронный блок 100 управления вводится сигнал положения из датчика 51 скорости вращения, который обнаруживает скорость вращения КР электродвигателя 1. На основе взаимосвязи относительных положений между зубцами 11 статора и зубцами 21 ротора в направлении вращения КР электродвигателя 1, вычисляемой исходя из сигнала положения, электронный блок 100 управления осуществляет управление повторяющейся коммутацией питаемых обмоток 12, обеспечивающей переход от одной фазы к другой. При этом управлении, электронный блок 100 управления подает ток возбуждения в обмотки 12 определенной фазы для возбуждения соответствующих зубцов 11 статора, чтобы генерировать силу магнитного притяжения между возбуждаемыми зубцами 11 статора и зубцами 21 ротора, находящимися между возбуждаемыми зубцами 11 статора, вследствие чего и вращается ротор 20.
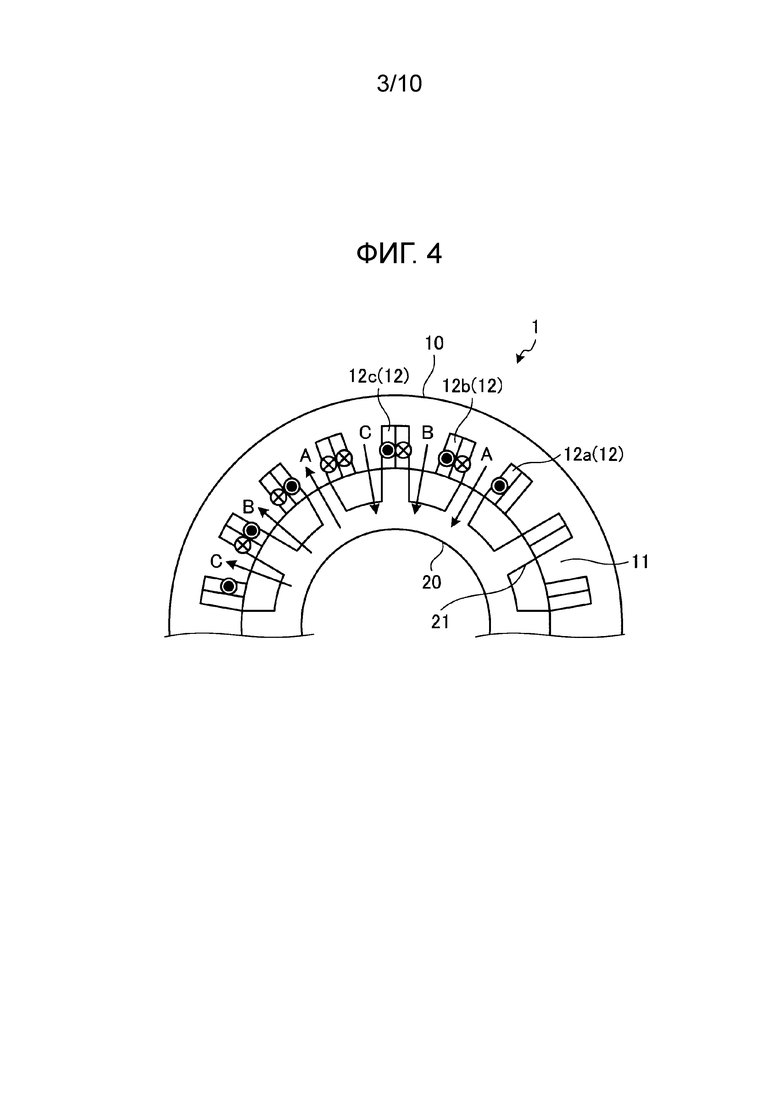
[0034] Как показано на участке 2b согласно фиг.3, инвертор 2 включает в себя схему коммутации, которая может осуществлять коммутацию структуры намотки (компоновочной структуры магнитных полюсов) КР электродвигателя 1 между намоткой NNNSSS (первой структурой намотки) и намоткой NSNSNS (второй структурой намотки) в соответствии с режимом соединения с КР электродвигателем 1. При этой схеме коммутации, например магнитные полюса соседних фаз A, B, и C одинаковы друг с другом, как показано на фиг.4. То есть, на фиг.4 показано, что фазы расположены справа в следующем порядке: фаза A, фаза B, фаза C, фаза A, фаза B и фаза C, а их магнитные полюса расположены в следующем порядке: полюс N, полюс N, полюс N, полюс S, полюс S и полюс S.
[0035] Вышеописанная структура намотки, в которой обмотки трех фаз 12a, 12b, и 12c намотаны в одном и том же направлении, называется «намоткой NNNSSS».
[0036] С другой стороны, в схеме коммутации, показанной на участке 2b согласно фиг.3, например, только направление магнитного полюса фазы B противоположно направлению магнитных полюсов соседних фаз A и C в магнитных полюсах соседних фаз A, B, и C, как показано на фиг.5. То есть, на фиг.5 показано, что фазы расположены справа в следующем порядке: фаза A, фаза B, фаза C, фаза A, фаза B и фаза C, а их магнитные полюса расположены в следующем порядке: полюс N, полюс S, полюс N, полюс S, полюс N и полюс S.
[0037] Вышеописанная структура намотки, в которой две из обмоток 12a, 12b, и 12c трех фаз (в данном случае - обмотки 12a и 12c) намотаны в одном и том же направлении, а остающаяся одна (в данном случае - обмотка 12b) намотана в противоположном направлении, а кроме того, обе обмотки 12a и 12c с одним и тем же направлением намотки и единственная обмотка 12b с противоположным направлением намотки расположены в чередующемся порядке, называется «намоткой NSNSNS». Отметим, что выражение «две обмотки 12a и 12c с одним и тем же направлением намотки и одна обмотка 12b с противоположным направлением намотки расположены в чередующемся порядке» конкретно представляет состояние, в котором обмотка 12b расположена между обмоткой 12a и обмоткой 12c в окружном направлении статора 10, как показано на фиг.5.
[0038] В устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления, происходит коммутация двух структур намотки во время приведения в действие КР электродвигателя 1 . С другой стороны, как описано ранее, кпд каждой из намотки NNNSSS и намотки NSNSNS изменяется в соответствии с состоянием нагрузки КР электродвигателя 1.
[0039] На фиг.6 иллюстрируется зависимость между нагрузкой (крутящим моментом) и кпд в каждой из структур намотки (в намотке NNNSSS и намотке NSNSNS), когда к КР электродвигателю 1 приложено напряжение 600 В. Как показано на фиг.6, в первом диапазоне, являющемся диапазоном на стороне низкой нагрузки (низкого крутящего момента), кпд намотки NNNSSS относительно выше, чем кпд намотки NSNSNS. С другой стороны, во втором диапазоне, являющемся диапазоном на стороне высокой нагрузки (высокого крутящего момента), кпд намотки NSNSNS относительно выше, чем кпд намотки NNNSSS.
[0040] На фиг.7 иллюстрируется форма кривой тока в каждой структуре намотки (намотке NNNSSS и намотке NSNSNS). Причина, по которой кпд намотки NSNSNS снижается при низкой нагрузке, как описано выше, заключается в том, что поскольку, как показано на фиг.7, момент времени (угол поворота), при котором ток возрастает до заданного значения максимального тока, при намотке NSNSNS (см. сплошную линию) наступает раньше, чем при намотке NNNSSS (см. пунктирную линию), количество раз коммутации увеличивается, и - как показано на фиг.8 - потери в железе при намотке NSNSNS увеличиваются по сравнению с потерями в железе при намотке NNNSSS. Отметим, что, как показано на фиг.8, потери в меди при намотке NNNSSS и намотке NSNSNS одинаковы. В данном случае, вышеописанное «значение максимального тока» представляет собой элемент условий возбуждения КР электродвигателя 1 (см. фиг.12, которая будет описана позже). Кроме того, вышеописанное «количество раз коммутации» представляет собой количество раз увеличения и уменьшения тока в периоде возбуждения (конкретно - периоде гистерезиса) обмотки 12.
[0041] На основе вышеописанных сведений, в устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления происходит коммутация структуры намотки на одну из намотки NNNSSS и намотки NSNSNS в соответствии с состоянием нагрузки КР электродвигателя 1 во время возбуждения КР электродвигателя 1. Конкретно, коммутация структуры намотки на намотку NNNSSS,происходит в диапазоне низкой нагрузки (низкого крутящего момента), подобном первому диапазону на фиг.6, а коммутация структуры намотки на намотку NSNSNS происходит в диапазоне высокой нагрузки (высокого крутящего момента), подобном второму диапазону на фиг.6. Это делает возможной коммутацию структуры намотки на оптимальную структуру намотки в соответствии с эффективным диапазоном при каждой из намотки NNNSSS и намотки NSNSNS.
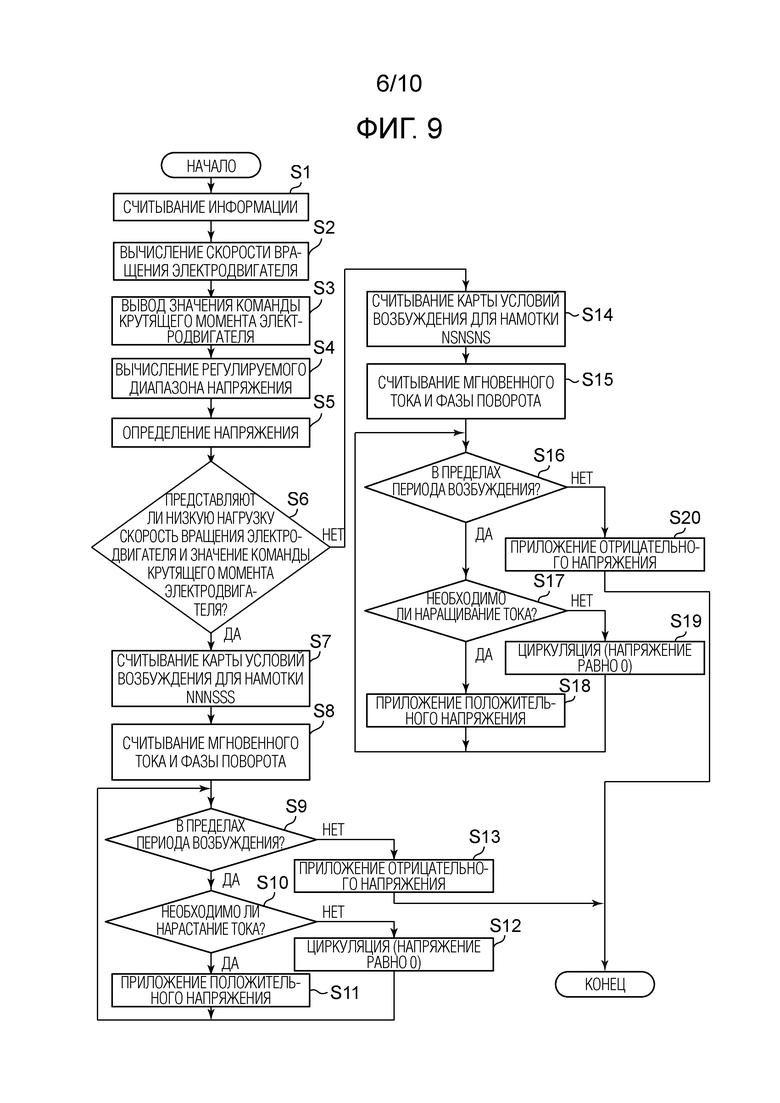
[0042] Ниже, со ссылками на фиг.9, будет описан один пример способа управления приведением в действие посредством электронного блока 100 управления для КР электродвигателя 1 в соответствии с этим вариантом осуществления.
[0043] Сначала электронный блок 100 управления считывает различную информацию, чтобы использовать ее при управлении приводом КР электродвигателя 1 (этап S1). Отметим, что вышеописанная «различная информация» представляет собой в конкретном случае сигнал положения, который вводится из датчика 51 скорости вращения, и требуемый крутящий момент КР электродвигателя 1.
[0044] Затем электронный блок 100 управления вычисляет скорость вращения КР электродвигателя 1 (называемую далее «скоростью вращения электродвигателя») на основе сигнала положения датчика 51 скорости вращения (этап S2). Потом электронный блок 100 управления выводит значение команды крутящего момента электродвигателя, соответствующее требуемому крутящему моменту (этап S3). Затем электронный блок 100 управления вычисляет регулируемый диапазон напряжения на основе состояния транспортного средства и т.п. (этап S4). Отметим, что вышеописанный «регулируемый диапазон напряжения» представляет собой диапазон напряжения, которое прикладывается к КР электродвигателю 1. Потом электронный блок 100 управления определяет напряжение, которое прикладывается к КР электродвигателю 1, на основе состояния транспортного средства и т.п. (этап S5).
[0045] Затем электронный блок 100 управления определяет, представляют ли собой скорость вращения электродвигателя и значение команды крутящего момента электродвигателя низкую нагрузку (этап S6). Конкретно, на этом этапе проводят процесс определения, обращаясь к карте коммутации, показанной на фиг.10.
[0046] Конкретно, карта коммутации, показанная на фиг.10, ограничивает диапазон приведения в действие КР электродвигателя 1, определяемый крутящим моментом и скоростью вращения КР электродвигателя 1. На карте коммутации согласно фиг.10, диапазон приведения в действие КР электродвигателя 1 делится на два диапазона, т.е., диапазон низкой нагрузки (первый диапазон) и диапазон высокой нагрузки (второй диапазон), с заданной линией L коммутации в качестве границы между ними.
[0047] Диапазон низкой нагрузки - это диапазон, где крутящий момент и скорость вращения являются относительно низкими, а конкретнее - диапазон, где крутящий момент и скорость вращения имеют значения ниже линии L в диапазоне приведения в действие КР электродвигателя 1. Диапазон высокой нагрузки - диапазон, где крутящий момент и скоростью вращения являются относительно высокими, а конкретнее - диапазон, где крутящий момент и скорость вращения имеют значения выше линии L коммутации в диапазоне приведения в действие КР электродвигателя 1. Как показано на фиг.10, линия L коммутации образована кривой линией таким образом, что чем выше крутящий момент, тем ниже скорость вращения, и что чем ниже крутящий момент, тем выше скорость вращения. Линия L коммутации может быть образована, например, прямой линией таким образом, что чем выше крутящий момент, тем ниже скорость вращения, и что чем ниже крутящий момент, тем выше скорость вращения.
[0048] На этом этапе используют карту коммутации, отличающуюся в зависимости от напряжения, определенного на этапе S5. Например, когда напряжение, определенное на этапе S5, является высоким напряжением (например, 600 В), используют карту коммутации (карту коммутации для высокого напряжения), показанную на фиг.10. С другой стороны, когда напряжение, определенное на этапе S5, является низким напряжением (например, 300 В), используют карту коммутации (карту коммутации для низкого напряжения), показанную на фиг.11.
[0049] Как показано на фиг.11, диапазон высокой нагрузки карты коммутации для низкого напряжения является более широким, чем диапазон высокой нагрузки карты коммутации для высокого напряжения (см. фиг.10), а диапазон низкой нагрузки карты коммутации для низкого напряжения является более узким, чем диапазон низкой нагрузки карты коммутации для высокого напряжения (см. фиг.10).
[0050] Карта коммутации для низкого напряжения, показанная на фиг.11 имеет такую конфигурацию, что отношение диапазона высокой нагрузки к диапазону низкой нагрузки в диапазоне приведения в действие является большим по сравнению с картой коммутации для высокого напряжения (см. фиг.10). То есть, когда напряжение, которое прикладывается к КР электродвигателю 1, устанавливают более низким, электронный блок 100 управления использует карту коммутации, где отношение диапазона высокой нагрузки к диапазону низкой нагрузки в диапазоне приведения в действие больше на этом этапе. Это делает возможным коммутацию структуры намотки, а также принятие во внимание того, что эффективный диапазон при каждой из намотки NNNSSS и намотки NSNSNS изменяется в зависимости от напряжения.
[0051] На этапе S6, электронный блок 100 управления определяет, находится ли рабочая точка, определяемая скоростью вращения электродвигателя и значением команды крутящего момента электродвигателя, в диапазоне низкой нагрузки карты коммутации. То есть, электронный блок 100 управления определяет, находятся ли скорость вращения электродвигателя и значение команды крутящего момента электродвигателя, определенные в соответствии с прикладываемым напряжением, на стороне диапазона низкой нагрузки или стороне диапазона высокой нагрузки, отличающегося от диапазона низкой нагрузки, по отношению к границе (линии L коммутации карты коммутации), делящей диапазон приведения в действие КР электродвигателя 1 на два диапазона.
[0052] После того, как электронный блок 100 управления определил, что рабочая точка КР электродвигателя 1 находится в диапазоне низкой нагрузки карты коммутации (ответ «Да» на этапе S6), электронный блок 100 управления обеспечивает подсоединение схемы коммутации таким образом, что структура намотки КР электродвигателя 1 становится намоткой NNNSSS, и обеспечивает считывание карты условий возбуждения для намотки NNNSSS (этап S7).
[0053] На этом этапе, как показано на фиг.4, электронный блок 100 управления обеспечивает коммутацию магнитных полюсов КР электродвигателя 1 на намотку NNNSSS. Потом электронный блок 100 управления обеспечивает считывание карты условий возбуждения, на которой описаны угол замыкания (угол начала возбуждения), угол размыкания (угол окончания возбуждения), значение максимального тока и т.п., как показано на фиг.12. Для удобства описания, на фиг.12 условия возбуждения, как для намотки NNNSSS, так и для намотки NSNSNS, показаны на одной и той же карте. Однако на самом деле только условия возбуждения для намотки NNNSSS описаны на карте условий возбуждения для намотки NNNSSS, а на карте условий возбуждения для намотки NSNSNS описаны только условия возбуждения для намотки NSNSNS.
[0054] Как показано на фиг.12, между намоткой NNNSSS и намоткой NSNSNS есть различия в условиях возбуждения. То есть, как показано на фиг.12, электронный блок 100 управления управляет таким образом, что период возбуждения (длительность возбуждения) при намотке NNNSSS становится большей, чем период возбуждения (длительность возбуждения) при намотке NSNSNS. В данном случае, поскольку нарастание тока при намотке NNNSSS происходит медленнее, чем при намотке NSNSNS, как показано на фиг.12, если период возбуждения при намотке NNNSSS равен периоду возбуждения при намотке NSNSNS, то существует вероятность дефицита крутящего момента. Поэтому, как описано выше, устанавливая длительность возбуждения при намотке NNNSSS, в случае которой нарастание тока происходит медленнее, чем при намотке NSNSNS, большей, чем длительность возбуждения при намотке NSNSNS, можно предотвратить дефицит крутящего момента, когда происходит коммутация структуры намотки, обеспечивающая переход на намотку NNNSSS.
[0055] Чтобы установить период возбуждения при намотке NNNSSS, больший, чем период возбуждения при намотке NSNSNS, как описано выше, фазу угла начала возбуждения (угла замыкания) при намотке NNNSSS делают наступающей раньше, чем фаза начала возбуждения (угла замыкания) при намотке NSNSNS (опережающей эту фазу), как показано на фиг.12.
[0056] Потом электронный блок 100 управления обеспечивает считывание мгновенного тока, текущего по обмотке 12, для каждой фазы, и считывание фазы поворота (угла поворота) ротора 20 (этап S8). На этом этапе, электронный блок 100 управления обеспечивает считывание мгновенного тока, фактически текущего по обмотке 12 определенной фазы, на основе сигнала обнаружения из датчика тока (не показан). Кроме того, электронный блок 100 управления обеспечивает обнаружение фазы поворота ротора 20 на основе сигнала положения датчика 51 скорости вращения.
[0057] Затем электронный блок 100 управления определяет, находится ли он в пределах периода возбуждения, на основе фазы поворота ротора 20 (этап S9). В данном случае, вышеописанный «период возбуждения» представляет собой диапазон угла поворота (длительности возбуждения) от угла замыкания (угла начала возбуждения) до угла размыкания (угла окончания возбуждения), как показано на фиг.12. После того, как электронный блок 100 управления определил, что он находится в пределах периода возбуждения (ответ «Да» на этапе S9), электронный блок 100 управления определяет, необходимо ли нарастание тока, на основе карты условий возбуждения (см. фиг.12) (этап S10).
[0058] После того, как электронный блок 100 управления определил, что необходимо нарастание тока (ответ «Да» на этапе S10), электронный блок 100 управления осуществляет «режим положительного напряжения», в котором к обмотке 12 прикладывается положительное напряжение (этап S11), и возвращается к процессу этапа S9. С другой стороны, после того, как электронный блок 100 управления определил, что наращивание тока не является необходимым (ответ «Нет» на этапе S10), электронный блок 100 управления осуществляет «режим циркуляции», в котором создается нулевое напряжение, прикладываемое к обмотке 12 (этап S12), и возвращается к процессу этапа S9. После того, как электронный блок 100 управления определил на этапе S9, что он не находится в пределах периода возбуждения (ответ «Нет» на этапе S9), электронный блок 100 управления осуществляет «режим отрицательного напряжения», в котором к обмотке 12 прикладывается отрицательное напряжение (этап S13), и завершает текущий режим работы.
[0059] После того, как электронный блок 100 управления определил на этапе S6, что рабочая точка КР электродвигателя 1 не находится в диапазоне низкой нагрузки карты коммутации (ответ «Нет» на этапе S6), электронный блок 100 управления обеспечивает подсоединение схемы коммутации таким образом, что структура намотки КР электродвигателя 1 становится намоткой NSNSNS, и обеспечивает считывание карты условий возбуждения для намотки NSNSNS (этап S14).
[0060] На этом этапе, как показано на фиг.5, электронный блок 100 управления обеспечивает коммутацию магнитных полюсов КР электродвигателя 1 на намотку NSNSNS. Затем электронный блок 100 управления обеспечивает считывание карты условий возбуждения на которой описаны угол замыкания (угол начала возбуждения), угол размыкания (угол окончания возбуждения), значение максимального тока и т.п., как показано на фиг.12.
[0061] Потом электронный блок 100 управления обеспечивает считывание мгновенного тока, текущего по обмотке 12, для каждой фазы, а также считывание фазы поворота (угла поворота) ротора 20 (этап S15). Содержание этого этапа является таким же, как содержание этапа S8.
[0062] Затем электронный блок 100 управления определяет, находится ли он в пределах периода возбуждения, на основе фазы поворота ротора 20 (этап S16). После того, как электронный блок 100 управления определил, что он находится в пределах периода возбуждения (ответ «Да» на этапе S16), электронный блок 100 управления определяет, необходимо ли наращивание тока, на основе карты условий возбуждения (см. фиг.12) (этап S17).
[0063] После того, как электронный блок 100 управления определил, что необходимо нарастание тока (ответ «Да» на этапе S17), электронный блок 100 управления осуществляет «режим положительного напряжения», в котором к обмотке 12 прикладывается положительное напряжение (этап S18), и возвращается к процессу этапа S16. С другой стороны, после того, как электронный блок 100 управления определил, что наращивание тока не является необходимым (ответ «Нет» на этапе S17), электронный блок 100 управления осуществляет «режим циркуляции», в котором создается нулевое напряжение, прикладываемое к обмотке 12 (этап S19), и возвращается к процессу этапа S16. После того, как электронный блок 100 управления определил на этапе S16, что он не находится в пределах периода возбуждения (ответ «Нет» на этапе S16), электронный блок 100 управления осуществляет «режим отрицательного напряжения» в котором к обмотке 12 прикладывается отрицательное напряжение (этап S20), и завершает текущий режим работы.
[0064] Как описано выше, за счет наличия схемы коммутации, показанной на участке 2b согласно фиг.3, электронный блок 100 управления для КР электродвигателя 1 в соответствии с этим вариантом осуществления может осуществлять коммутацию структуры намотки обмоток 12 во время приведения в действие КР электродвигателя 1. То есть, обычно конфигурация инвертора, входящая в состав аппаратных средств, однозначно определяет одну из структур намотки, т.е., намотки NNNSSS и намотки NSNSNS, и поэтому изменить структуру намотки во время приведения в действие КР электродвигателя 1 невозможно. С другой стороны, в случае электронного блока управления 100 управления для КР электродвигателя 1 в соответствии с этим вариантом осуществления, оказывается возможной коммутация на структуру намотки, которая является оптимальной по кпд, в соответствии с состоянием нагрузки КР электродвигателя 1.
[0065] Кроме того, электронный блок 100 управления для КР электродвигателя 1 в соответствии с этим вариантом осуществления может повысить максимальный крутящий момент КР электродвигателя 1 без снижения кпд КР электродвигателя 1, осуществляя коммутацию, обеспечивающую переход на намотку NNNSSS, в диапазоне низкой нагрузки и коммутацию, обеспечивающую переход на намотку NSNSNS, в диапазоне высокой нагрузки.
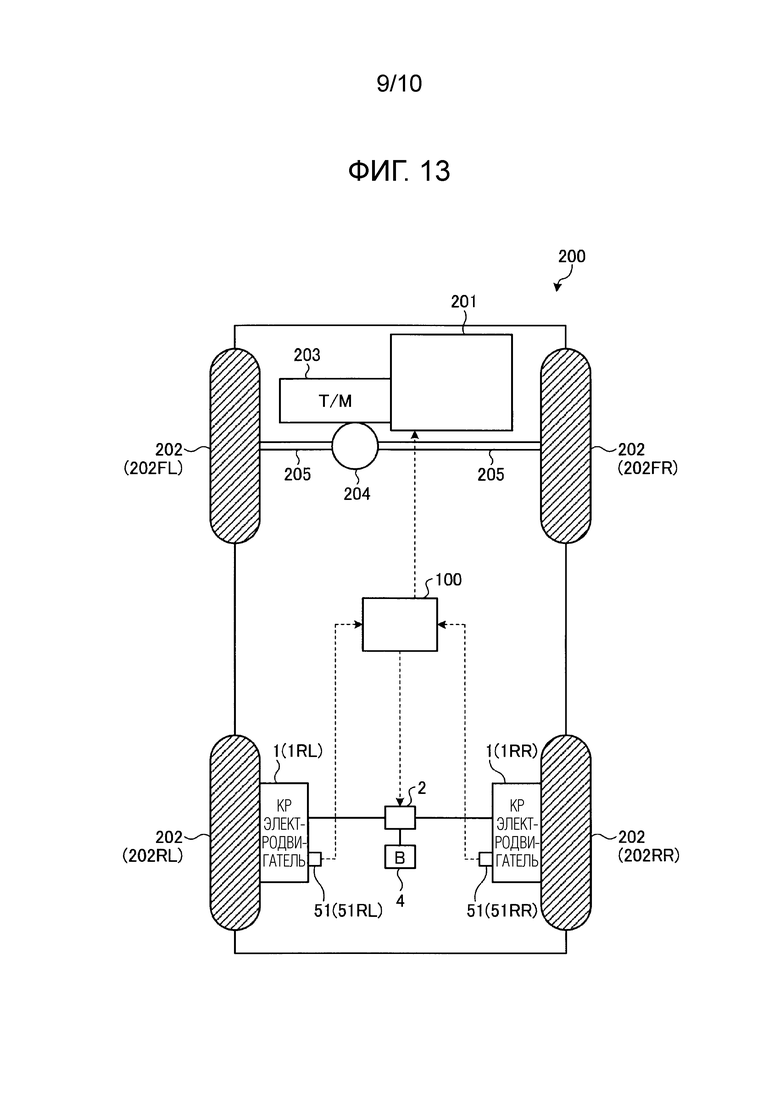
[0066] Hиже, со ссылками на фиг.13, будет описано транспортное средство, к которому применим электронный блок 100 управления для КР электродвигателя 1 в соответствии с этим вариантом осуществления. Транспортное средство 200, показанное на фиг.13 включает в себя двигатель 201, колеса 202, трансмиссию (T/M) 203, дифференциал 204, ведущие валы 205, и КР электродвигатели (КР) 1. Транспортное средство 200 представляет собой полноприводное транспортное средство, в котором двигатель 201 осуществляет привод левого и правого передних колес 202FL и 202FR, а КР электродвигатели 1 в качестве электродвигателей задней установки соответственно осуществляют привод левого и правого задних колес 202RL и 202RR.
[0067] КР электродвигатель 1 представляет собой так называемый электродвигатель, встроенный в колесо, и предназначен для каждого из левого и правого задних колес 202RL и 202RR. В узле заднего привода транспортного средства 200, левый задний КР электродвигатель 1RL соединен с левым задним колесом 202RL, а правый задний КР электродвигатель 1RR соединен с правым задним колесом 202RR. Задние колеса 202RL и 202RR являются вращаемыми независимо друг от друга.
[0068] Привод левого заднего колеса 202RL осуществляется за счет выходного крутящего момента (крутящего момента электродвигателя) левого заднего КР электродвигателя 1RL. Привод правого заднего колеса 202RR осуществляется за счет выходного крутящего момента (крутящего момента электродвигателя) правого заднего КР электродвигателя 1RR.
[0069] Левый задний КР электродвигатель 1RL и правый задний КР электродвигатель 1RR подсоединены к аккумулятору (B) 4 посредством инвертора 2. Каждый из левого заднего КР электродвигателя 1RL и правого заднего КР электродвигателя 1RR функционирует как электрический двигатель за счет электроэнергии, подаваемой из аккумулятора 4, а также как электрический генератор, который преобразует крутящий момент (внешнюю силу), передаваемый с заднего колеса 202RL, 202RR, в электроэнергию. Инвертор 2 включает в себя электрическую схему для левого заднего КР электродвигателя 1RL и электрическую схему для правого заднего КР электродвигателя 1RR.
[0070] Электронный блок 100 управления управляет левым задним КР электродвигателем 1RL, правым задним КР электродвигателем 1RR и двигателем 201. Например, электронный блок 100 управления включает в себя электронный блок управления КР электродвигателями (ЭБУ КР электродвигателя) и электронный блок управления двигателем (ЭБУ двигателя). В этом случае, ЭБУ двигателя осуществляет управление крутящим моментом двигателя, регулируя выходной крутящий момент двигателя 201 до достижения целевого значения крутящего момента посредством управления на входе, управления впрыском топлива, управления зажиганием, и т.п. ЭБУ КР электродвигателя осуществляет управление электродвигателями применительно к левому заднему КР электродвигателю 1RL и правому заднему КР электродвигателю 1RR на основе сигналов, вводимых из датчика 51 скорости вращения. Датчик 51 скорости вращения включает в себя левый задний датчик 51RL скорости вращения, который обнаруживает скорость вращения левого заднего КР электродвигателя 1RL, и правый задний датчик 51RR скорости вращения, который обнаруживает скорость вращения правого заднего КР электродвигателя 1RR.
[0071] Хотя устройство управления коммутируемым реактивным электродвигателем в соответствии с изобретением подробно описано со ссылками на способ осуществления изобретения, сущность изобретения не ограничивается этими описаниями, и ее следует интерпретировать в широком смысле на основе текста формулы изобретения. Кроме того, излишне говорить, что в рамках сущности изобретения предусматривается возможность внесения различных изменений, модификаций и т.п., на основе этих описаний.
[0072] Например, вместо вольтодобавочного устройства 3 (см. фиг.1), в устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления можно предусмотреть понижающий напряжение модуль (понижающий преобразователь) для понижения напряжения, которое прикладывается к КР электродвигателю 1.
[0073] В устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления, когда определяется, отображают ли низкую нагрузку скорость вращения электродвигателя и значение команды крутящего момента электродвигателя (см. этап S6 на фиг.9), можно, как показано на фиг.14, воспользоваться, например, картой коммутации, на которой диапазон нечувствительности, где не осуществляется коммутация структуры намотки, предусмотрен на границе между диапазоном низкой нагрузки и диапазоном высокой нагрузки. В этом случае, как показано на фиг.14, на границе между диапазоном низкой нагрузки и диапазоном высокой нагрузки предусмотрена первая линия L1 коммутации на стороне диапазона низкой нагрузки, предусмотрена вторая линия L2 коммутации на стороне диапазона высокой нагрузки, а между первой линией L1 коммутации и второй линией L2 коммутации предусмотрен диапазон нечувствительности. Когда рабочая точка КР электродвигателя 1 находится в диапазоне нечувствительности, электронный блок 100 управления не осуществляет коммутацию между намоткой NNNSSS и намоткой NSNSNS.
[0074] Предусматривая диапазон нечувствительности в устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления, можно подавить потери коммутации, возникающие, например, из-за частой коммутации структуры намотки.
[0075] В устройство управления КР электродвигателя 1 в соответствии с этим вариантом осуществления, как показано на фиг.3, если инвертор 2 включает в себя схему коммутации, по меньшей мере, для одной фазы, становится возможной коммутация, обеспечивающая переход между намоткой NNNSSS и намоткой NSNSNS, а инвертор 2 может включать в себя схемы коммутации для множества фаз. В этом случае, как показано на фиг.3, можно добавлять транзисторы соответственно к диодам Da3 и Da4 в фазе A и диодам Dc3 и Dc4 в фазе C, каждый из которых обведен пунктирной линией.
[0076] Следовательно, поскольку в устройстве управления КР электродвигателя 1 в соответствии с этим вариантом осуществления множество схем коммутации могут управлять операциями коммутации, оказывается возможным, например, распределение нагрузки инвертора благодаря частой коммутации структуры намотки.
[0077] Пример применения электронного блока 100 управления для КР электродвигателя 1 в соответствии с вариантом осуществления не ограничивается показанным на фиг.13 (и называемым далее «примером 1 применения»). Скажем, пример применения электронного блока 100 управления для КР электродвигателя 1 может представлять собой конфигурацию, в которой - в отличие от примера 1 применения - КР электродвигатели 1 предусмотрены для всех колес 202 (пример 2 применения). В альтернативном варианте, в отличие от примера 1 применения, это может быть заднеприводное транспортное средство, не снабженное передним узлом привода (пример 3 применения).
[0078] Пример применения электронного блока 100 управления для КР электродвигателя 1 может представлять собой конфигурацию, в которой - в отличие от примеров 1-3 применения - путевым источником питания транспортного средства 200 является только КР электродвигатель 1 в качестве электродвигателя, встроенного в колесо (пример 4 применения). В альтернативном варианте, в отличие от примера 4 применения, это может быть конфигурация, в которой КР электродвигатель 1 не является электродвигателем, встроенным в колесо (пример 5 применения).
[0079] Пример применения электронного блока 100 управления для КР электродвигателя 1 может представлять собой конфигурацию, в которой - в отличие от примера 5 применения - конфигурация согласно примеру 1 применения смонтирована в качестве узла переднего привода (пример 6 применения). В альтернативном варианте, это может быть конфигурация, в которой - в отличие от примера 3 применения - не предусмотрен узел заднего привода, или в которой - в отличие от примера 4 применения - компоновка узла привода изменена на обратную в продольном направлении (пример 7 применения).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2005 |
|
RU2342763C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПУСКА ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2532532C2 |
| КОНТРОЛЛЕР ДЛЯ ПЕРЕКЛЮЧАЕМОГО РЕАКТИВНОГО ЭЛЕКТРОМОТОРА | 2018 |
|
RU2694067C1 |
| УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2005 |
|
RU2351057C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2630258C2 |
| МАГНИТНАЯ ЦЕПЬ С ПЕРЕКЛЮЧЕНИЕМ | 2001 |
|
RU2271595C2 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |


Изобретение относится к области электротехники, в частности к схеме и способу управления реактивным коммутируемым электродвигателем. Технический результат - повышение максимального крутящего момента коммутируемого реактивного электродвигателя. Электронный блок управления обеспечивает коммутацию схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет первую структуру намотки, когда - по отношению к границе, делящей диапазон приведения в действие коммутируемого реактивного электродвигателя на два диапазона, - крутящий момент и скорость вращения коммутируемого реактивного электродвигателя, которые определяются в соответствии с прикладываемым напряжением, находятся в первом диапазоне на стороне низкой нагрузки. Электронный блок управления обеспечивает коммутацию схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет вторую структуру намотки, когда крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся во втором диапазоне, отличающемся от первого диапазона. 2 н. и 5 з.п. ф-лы, 14 ил.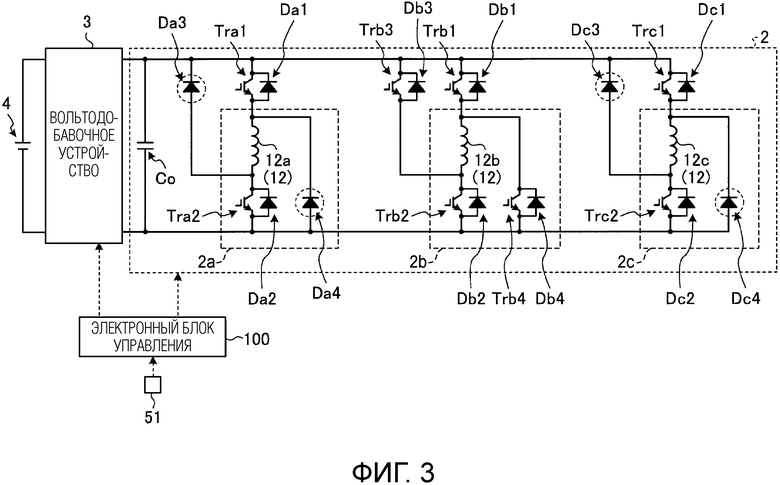
1. Схема, содержащая:
коммутируемый реактивный электродвигатель, выполненный с возможностью приведения в действие, когда по обмоткам трех фаз текут токи возбуждения;
схему коммутации, которая соединена с коммутируемым реактивным электродвигателем, причем схема коммутации выполнена с возможностью коммутации первой структуры намотки и второй структуры намотки,
при этом первая структура намотки представляет собой структуру намотки, в которой обмотки трех фаз намотаны в одном и том же направлении,
при этом вторая структура намотки представляет собой структуру намотки, в которой обмотки двух фаз из числа обмоток трех фаз намотаны в одном и том же направлении, остающаяся обмотка одной фазы намотана в противоположном направлении, а обмотки двух фаз с одним и тем же направлением намотки и обмотка одной фазы с противоположным направлением намотки расположены в чередующемся порядке; и
электронный блок управления, выполненный с возможностью осуществления коммутации схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет первую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в первом диапазоне на стороне нагрузки, меньшей чем граничное значение,
при этом граничное значение делит диапазон приведения в действие коммутируемого реактивного электродвигателя на первый диапазон и второй диапазон,
причем электронный блок управления выполнен с возможностью осуществления коммутации схемы коммутации таким образом, что коммутируемый реактивный электродвигатель имеет вторую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся во втором диапазоне, отличающемся от первого диапазона,
при этом диапазон приведения в действие коммутируемого реактивного электродвигателя представляет собой диапазон, который определяется крутящим моментом и скоростью вращения коммутируемого реактивного электродвигателя, а крутящий момент и скорость вращения коммутируемого реактивного электродвигателя определяются в соответствии с прикладываемым напряжением.
2. Схема по п.1, в которой,
когда напряжение, прикладываемое к коммутируемому реактивному электродвигателю, является низким, второй диапазон шире, чем второй диапазон, когда напряжение, прикладываемое к коммутируемому реактивному электродвигателю, является высоким.
3. Схема по п.1 или 2, в которой
электронный блок управления выполнен с возможностью не выполнять коммутацию схемы коммутации, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в диапазоне нечувствительности, а
диапазон нечувствительности представляет собой диапазон, находящийся на границе между первым диапазоном и вторым диапазоном.
4. Схема по п.1, в которой
схема коммутации включает в себя схемы коммутации для множества фаз.
5. Схема по п.1, в которой
длительность возбуждения первой структуры намотки больше, чем длительность возбуждения второй структуры намотки.
6. Схема по п.5, в которой
электронный блок управления выполнен с возможностью обеспечивать фазу угла начала возбуждения первой структуры намотки, опережающую фазу угла начала возбуждения второй структуры намотки.
7. Способ управления схемой,
причем схема включает в себя коммутируемый реактивный электродвигатель, схему коммутации и электронный блок управления,
при этом коммутируемый реактивный электродвигатель выполнен с возможностью приведения в действие, когда по обмоткам трех фаз текут токи возбуждения,
схема коммутации соединена с коммутируемым реактивным электродвигателем, причем схема коммутации выполнена с возможностью осуществления коммутации первой структуры намотки и второй структуры намотки,
при этом первая структура намотки представляет собой структуру намотки, в которой обмотки трех фаз намотаны в одном и том же направлении, при этом вторая структура намотки представляет собой структуру намотки, в которой обмотки двух фаз из числа обмоток трех фаз намотаны в одном и том же направлении, остающаяся обмотка одной фазы намотана в противоположном направлении, а обмотки двух фаз с одним и тем же направлением намотки и обмотка одной фазы с противоположным направлением намотки расположены в чередующемся порядке,
при этом способ управления содержит этапы, на которых:
коммутируют посредством электронного блока управления схему коммутации таким образом, что коммутируемый реактивный электродвигатель имеет первую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся в первом диапазоне на стороне нагрузки, меньшей чем граничное значение; и
коммутируют посредством электронного блока управления схему коммутации таким образом, что коммутируемый реактивный электродвигатель имеет вторую структуру намотки, когда электронный блок управления определяет, что крутящий момент и скорость вращения коммутируемого реактивного электродвигателя находятся во втором диапазоне, отличающемся от первого диапазона,
при этом граничное значение делит диапазон приведения в действие коммутируемого реактивного электродвигателя на первый диапазон и второй диапазон, при этом диапазон приведения в действие коммутируемого реактивного электродвигателя представляет собой диапазон, который определяется крутящим моментом и скоростью вращения коммутируемого реактивного электродвигателя, а крутящий момент и скорость вращения коммутируемого реактивного электродвигателя определяются в соответствии с прикладываемым напряжением.
| Электромеханическое моделирующее устройство | 1973 |
|
SU444198A1 |
| WO 9702649 A1, 23.01.1997 | |||
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2572805C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ МЕТОДОМ КОМПЕНСИРУЮЩЕГО МАГНИТНОГО ПОЛЯ | 2007 |
|
RU2338315C1 |

