Изобретение относится к электрогтехнике и может быть использовано для построения автоматических систем фазового управления вентильным асинхронным электроприводом с регулируемым с та торным и роторным напряжением.
Известен способ фазового управления вентильным асинхронным электроприводом, эаключакидийся в том, что в зависимости от рассогласования по скорости вращения привода формируют управляю1ций сигнал, которым изменяют угол открывания вентилей преобразователя, регулирующего напряжение, подводимое к статорным цепям асинхронного электродвигателя 1.
Однако данный способ требует для своей реализации специального датчика скорости вращения, сопрягаемого с BaifeoM электродвигателя, регулятора скорости с корректирукйцими цепями и систекы импульсно-фазового управления (СИФУ), преобразующей сигнал управления в сдвиг по фазе импульсов управления вентилями тиристорного регулятора напряжения статора асинхронного электродвигателя. Проблема сопряжения датчика скорости с валом электродвигателя усложйЯется из-за отсутствия специального выхода вала .у асинхронных электродвигателей и механизмов, с которыми они соединены, что требует применения специальных механических редукторов, снижающих их точность и надежность. Создание точного стабильного датчика скорости с аналоговым выходньм сигналом, особенно для взры10воопасных производств также является сложной проблемой. Применение же импульсных датчиков скорости требует последующего преобразования частоты датчика в напряжение, поскольку сов15ременные СИФУ управляются аналоговым сигналом. Это, кроме дополнительной ошибки, усложняет систему, увеличивает инерционность из-за наличия фильтра на выходе преобразователя
20 и ухудшает надежность системы. Необходимость использования дополнительной СИФУ усложняет систему, увеличивает ошибку и ухуд|11ает надежность.
25
Известен способ фазового управления вентильным асинхронным электроприводом, например, по схеме асинхронно-вентильного каскада, заключающийся в том, что в зависимости от рассогласования по скорости вргицения привода формируют управляющий сигна которым изменяют угол открывания ве тилей преобразователя, регулирующег противоЭДС, вводимую в цепь выпрямjjeHHoro тока ротора, фазного асинх онйого электродвигателя 2. Данный способ также требует для Своей реализации специального датчи (ркорости вращения и сложной СИФУ для преобразования сигнала управлеиия от регулятора в сдвиг По фазе Импульсов управления вентилями ти ристорного преобразователя, работаю его в режиме инвертора и установле його в цепи выпрямленного тока рото фазного электродвигателя. Недостатк является еще и то, что требует применение специальных датчико скорости и сложной схемы управления Наиболее близким к изобретению является устройство управления асин ройным двигателем, содержащее цифро вой задатчик числа, подклю}1енный вы ходами к входам разрядов цифрового задатчика интенсивности, импульсный вход которого подключен к выходу генератора эталонной частоты, а выходы его разрядов йодключены к входам преобразователя код-частота в составе счетчика-делителя, выходы разрядов которого подключены к первым входам группы элементов И, вторые входы которых подключены к входам преобразователя, а выходы подключены к входам схемы ИЛИ, импульсный же вход преобразователя подключен к выходу генератора эталонной частоты, а выход схемы ИЛИ, являющийся выходом преобразователя, подключен к входу первого преобразователя частота-напряжение и к пер вому входу устройства синхронизации второй вход которого подключен к входу -второго преобразователя частота-напряжение и к выходу частотно-импульсного датчика скорости, установленного на валу электродвигателя, подключенного к тиристорному преобразователю, управляющие входы вентилей которого подключены к выходам системы .импульсно-фазового управления, выходал узла синхронизации подключены к входам реверсивного счетчика, выходы ра:зрядов которого подключены к входам преобразователя код-напряжение, выход . которого подключен к первому входу сумматора напряжения, два других входа которого подключены к выходам П образователей частота-напряжение выход сумматора напряжения подключен к входу СИФУ тиристорного преобразователя непосредственно или через ансшоговый регулятор тока,вто - рой вход которого подключен к датчику тока тиристорного преобразоват ля. Эта система позволяет сформировать ПИ- закон регулирования по скорости вращения электропривода, г ричем задание представлено в виде десятичного кода, интёгрешьная составляющая формируется в цифровом виде как интеграл от разности частот, пропорциональных заданию и текущей скорости, а пропорциональная составляющая формируется в ансшоговом виде путем сравнения напряжений, пропорциональных заданной и текущей скорости. В систему может быть введена последовательная коррекция по аналоговому сигналу датчика тока преобразователя 3. Однако данное устройство имеет сложную структуру, требует применения большого количества преобразователей форм представления сигналов, каждый из которых вносит в систему ограничение по точности и быстродействию. Использование же в последнем звене аналоговых элементов (операционных усилителей) вносит в систему ограничения, свойственные аналоговым элементам недостатки (нестабильность, дрейф нуля, зависимость от температуры и напряжения Питания), что снижает динамическую точность системы. Кроме того, использование аналоговой СИФУ также ВНОСИТ дополнительные погрешности и нестабильность. Цель изобретения - упрощение и повышение надежности Поставленная цель достигается тем, что в способе фазового управления асинхронным электродвигателем, обмотки которого подключены к питающей сети через вентильный преобразователь, синхронизированной сетью, при котором.формируют опорную последовательность импульсов с частотой, кратной частоте сети, и управляющую последовательность импульсов, сдвинутую относительно первой на угол управления, которой коммутируют вентили преобразователя, измеряют частоту сксшьжения ротора и, умножая ее на коэффициент К формируют управляющую последовательность импульсов, при этом величину угла управления ограничивают в заданном диапазоне. , Кроме того, в способе форбвгруют дополнительный сигнгш коррекции, по . которому регулируют фазу сформированной управляющей последовательности импульсов, Сигнал коррекции может быть получен путем измерения приращения периода управляющей последовательности импульсов. Кроме того, .сигнал коррекции может быть получен путем измерения разницы между текущим периодом управляющей последовательности импульсов и заданным постоянным временным интервалом, где и п - синхронная
и заданная скорости вргицения; гп фаэнрсть вентильного преобразовател
В устройстве для реализации способа, содержащем асинхронный электродвигатель, статорные или роторные обмотки которого подключены к управлякхцему m -фазному вентильному j преобразователю напряжения, управлящие входы вентилей которого подключены через блок формирователей-усилителей к выходам распределителя им пульсов, вход синхронизации которог подключен к выходу формирователя импульсов синхронизации, подключенног к сетевому напряжению питания,преобразователь код-частота, состоящий из схемы ИЛИ, счетчика-делителя и группы элементов И, цифровой задатчик числа, подключенный выходами к входам разрядов цифрового задатчика интенсивности, импульсный вход кото рого подключен к выходу генератора эталонной частоты, а выходы его разрядов подключены к первым входам группы элементов И, к вторым входам которых подключены,выходы разрядов счетчика-делителя, а выходы указанных, элементов И.подключены к входам схемы ИЛИ, блоки переноса кода, регистр памяти, три элемента задержки введен датчик частоты скольжения, второй счетчик-делитель, счетчик-измеритель периода, неуправляемый де;литель частоты,вторая схема ИЛИ и второй формирователь импульсов -синхронизации, подключенный к выходу да чика частоты скольжения электродвигателя, выход генератора эталонной частоты подключен к первому входу второй схемы ИЛИ, второй вход которой подключен через первый элемент задержки к выходу первой схемы ИЛИ, la выход второй схемы ИЛИ подключен Ы счетному входу первого счетчикацелителя в преобразователе код-частота и к счетному входу второго счетчика-делителя, входы разрядов которого подключены через первый блок переноса кода к выходс1М разрядов регистра памяти, входы разрядов которого через второй блок переноса кода подключены к выходам разрядов счетчика-измерителя периода,, счетны вход которого подключен через неуправляемый делитель частоты к выходу генератора эталонной частоты, вьисод второго формирователя импульсов синхронизации подключен к входу обнуления регистра памяти и к входу второго элемента задержки, выход которого подключен к управляпщему входу второго блока переноса кода и к входу третьего элемента задержки, выход которого подключен к входу обнуления счетчика-измерителя периода а выход второго счетчика-делителя подключен к управляющему входу первого блока переноса кода и к сдвигающему входу распределителя импульсов .
Причем в качестве датчика частоты скольжения для фазного асинхронного электродвигателя используется датчик переменного напряжения,.подключенный к фазным обмоткам ротора электродвигателя, а для коооткозамкнутого асинхронного электродвигател используется датчик электромагнитного поля, установлен1}ый нормашьно потрку рассеяния ротора у вала элекродвигателя, при этом в качестве дачика электромагнитного поля может ыть использована катушка индуктив1НОСТИ с ферромагнитным сердечником или гальваномагнитный элемент, например, датчик Холла или.магнитодиод, или магниторезистор, или Магнитотранзистор, или магнитотиристор или комбинированный магнитный прибор.
Для улучшения динамических характеристик в систему могут быть введены источник установки дискретной коррекции и блок дискретной коррекции, включенный между входом распределителя импульсов и выходом второго счетчика-делителя, причем второй вход блока дискретной коррекции подкддючен к источнику установок коррекции ...
Для ограничения углов управления и защиты системы регулирования от опрокидывания в нее введены источник уставки ограничения углов включения вентилей и блок ограничения углов включения вентилей, подключенный между выходами распределителя импульсов и входами блока усилителейформирователей, причем второй вход блока ограничения углов включения вентилей подключен к второму выходу первого формирователя импульсов синхронизации, а третий вход - к источнику уставок ограничения углов включения вентилей.
Для введения коррекции по току вентильного преобразователя в устройство могут быть введены источник установки аналоговой коррекции, датчик тока, подключенный входом к вентильному преобразователю h выходом к блоку аналоговой коррекции, выход которого подключен к третьему входу блока дискретной коррекции, второй вход блока аналоговой коррекции подключен к источнику уставки аналоговой коррекции.
Для ограничения тока преобразователя второй выход аналогового блока коррекции может быть подключен к четвертому входу блока ограничения углов включения вентилей через компаратор, второй вход которого подключен к источнику уставки тока ограничения преобразователя.
Для введения коррекции, пропорциональной ошибке по скорости вращения электропривода, блок дискретной коррекции может быть выполнен, например, из последовательно соедииеннЕлх блока выделения разности вре манных интервалов, блика изменения временного интервала и блока формирования импульсов, а также блока опорного временного интервала, причем первый вход блока-дискретной коррекции подключен к входам блока выделения разности временных интервалов и блока опорного временного интервала, второй вход блока дискретной коррекции подключен к втором входу блока изменения временного интервала а выход блока опорного временного интервала подключен к второму входу блока вьщеления разности временных интервалов.
Для введения коррекции по производной скорости вращения электропривода блок дискретной коррекции может быть выполнен, например, из последовательно соединенных блока выделения приращения периода, блока изменения временных интервалов и блока формирования импульсов, причем первый вход блока дискретной коррекции подключен к входу блока вьщеления приращения периода, а второй вход к второму входу блока изменения временных интервалов.
Для вйедения коррекции, пропорциональной ошибке по скорости и производной скорости вращения электропривода, -блок дискретной коррекции выполнен из двух последовательно соединенных блоков дискретной коррекции , пропорциональной ошибке по скорости вращения электропривода, приче во втором блоке дискретной коррекции между блоком вьвделения разности временных интервалов и блоком,изменения временного интервала дойолкительно введена схема И, второй вхо которой йодключен к выходу блока выделения разности временного интервала в первом блдке дискретной ксгррекции.
Для дополнит-ельного сдвига по фазе импульсов 5 правления в зависимости, от сигнала коррекции по току вентильного преобразователя, блок дискретной коррекции может быть выполнен, например, из последовательно соединенных блока развертывающего напЬяжения, компаратора и формирователя импульсов, П1жчем первый вход блока дискретной коррекции подключен к блоку развертыванщего напряжения, а третий вход - к второму входу компаратора, третий вход которого подключен к источнику опорного напряжения.
В системе блок ограничения углов включения вентилей может быть выполней, например, из последовательн соединенных блока формирования импульсов ограничения и логического блокасравнения, причем первые входы блока ограничения углов включения вентилей соединены с вторалми входами логического блока сравнения второй и третий входы блока ограничения -углов включения вентилей соединены с первым и вторым входами .блока формирования импульсов ограничения, а четвертый вход этого блока ограничения соединен с третьи входом логического блока сравнения.
Способ заключается в следующем.
Известно, что частота вращения fgp вала асинхронного электродвигателя связана с частотаг«1 токов статора (4 и ротора fp сл-едующим выра жением
(1)
f С: fp/
f,
6Р
причем
ILE
fp
fc-S
f,
И
6Р 60 где n - скорость вращения в об/мин;
р - число пар полюсов двигателя
S - скольжение двигателя. Тогда выражение (1) можно записать в виде
fp fc-tf (2)
Из выражения (2) следует, что пр замыкании системы фазного управлени вентильным асинхронным электроприводом непосредственно подачей импульсов с датчика частотаа тока ротора на вентили преобразователя обратная связь по скорости вращения электропривода получается отрицательной. Действительно, при снижении скорост двигателя (например, при набросе на1грузки) частота тока ротора увеличивается, так как увеличивается скольжение, следовательно, очередной импульс управления приходит на вентиль раньше, уменьшая угол открывания А вентиля и увеличивая напряжение, которое ув.еличивает скорость двигателя до тех пор, пока она не станет равной заданной. При зтом устанавливается новый уровень угла открытия вентилей, соответствующий новой нагрузке. Частота следования синхронизирующих импульсов, формиpye№ix из.напряжения сети в моменты естественного включения вентилей равна х m f с где га - фазность преобразователя.
В установившемся режиме частота следования импульсов управления равна f-упр m-fc.
Таким образом, в установившемся режиме частота следования импульсов обратной связи, пропорциональная частоте тока ротора , должна быть равна
fo-K f
(3)
m,
О
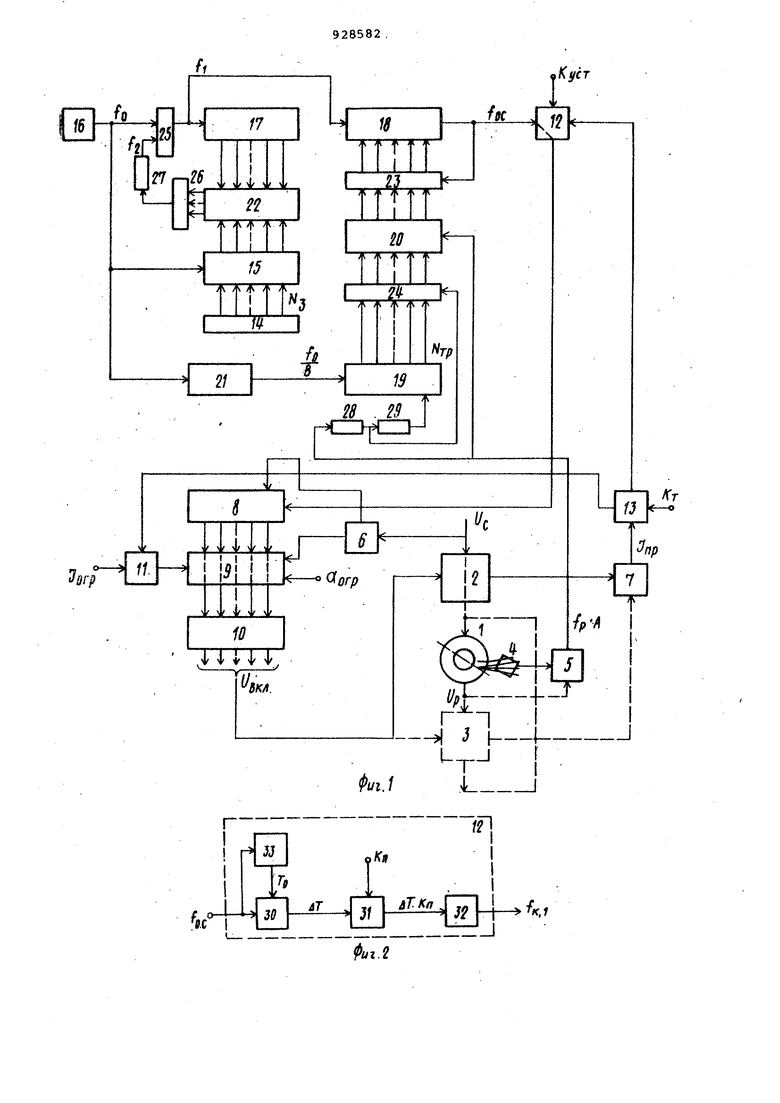
ое где К - коэффициент умножения. Установившаяся скорость будет равна K-rm К-т fc-60 р.К К где п - синхронная скорость вращения двигателя в об/мин. Из выражения (4) находим значение для коэффициента К к - п о -зс-г Подставляя выражение получим - По ос п о о . Следовательно т - Tp-S ос - m Из этого следует, что период сле дования импульсов обратной связи, являющихся импульсами управления, прямо пропорционален периоду следования импульсов тока ротора и задан ному скольжению и обратно пропорцио нален фазности преобразователя. Из выражения (6) видно, что способ тео рётически позволяет получить максимальный диапазон изменения скорости от п„,„ О до пмд пн соответ ствующим изменением коэффициента умножения К по выражению (5). Практический диапазон изменения скорости ограничивается энергетическими факторами. Как было отмечено выше, в установившемся режиме периоды следования импульсов синхронизации импульсов управления неизменны и равны , где Tj4-. период сетевого напряжени Между этими импульсами устанавливается в зависимости от сигнала задания и нагрузки определенный фазовый сдвиг, равный углу открытия вентилей, определяющий уровень выхо ного напряжения преобразователя, воздействукицего на скорость двигат ля. Появление возмущения в замкнуто системе (по заданию или нагрузке) вызывает изменение скорости к част ты тока ротора, что влечет за собой накопление фазового сдвига, и соответственно изменение угла открытия вентилей и выходного напряжения в сторону уменьшения возникшего рассогласования по скорости. Причем и менение фазы равно интеграилу от те кущего рассогласования по частоте. В данном случае фазовый принцип уп равления выходным напряжением вентильного преобразователя позволяет использовать его в качестве фазово дискриминатора, на выходе которого выделяется напряжение в зависимост от фазного рассогласования между импульсами синхронизгщии и управления, поступакицими на вход сравнения преобразователя. Исходя из этого, относительное изменение (скваж- ность) .фазы этих последовательностей импульсов для однофазного преобразователя можно записать в виде tT Т . дТ где - - относительное приращение текущего периода иктульсов Ij управления; Ad - изменение фазового рассогласования между импульсами , равное изменению угла открывания вентиf . ufdt - число периодов за время t переходного процесса. Учитывая, iTO скорость вращения двигателя и частота токов статора и ротора связаны соотношением для т-фазного преобразователя выражение (8) можно записать в виде ,%45«T-f,) X (n-f - п j)dt , откуда изменение угла открытия вентилей т-фазного преобразователя может быть записано выражением 2Ло -та 5/ (9) т.е. изменение угла открытия вентилей пропорционально интегралу от рассогласования по скорости вращения двигателя. Следовательно, система, замкнутая по сигналу, пропорциональному частоте тока ротора, является аститической по скорости вращ :зния электропривода. При широком диапазоне изменения скорости вращения и нагрузки и резком характере возмущений может потребоваться для улучшения динамики з.амкнутой системы введения корректирующих сигналов по рассогласованию скорости, по производной скорости или их сумме. Способ позволяет вводить коррекцию без .специальных датчиков и преобразователей путем дополнительного сдвига по фазе импульсов управления на величину, .пропорциональную сигналу коррекции. Причем введение коррекции, пропорциональной рассогласованию по скорости, производ Гят в зависимости от разности между текущим периодом последовательности импульсов управления и постоянным временным интервалом TQ. При этом относительное изменениефазы управляющих импульсов. (угла открытия вентилей) для однофаэвого преобразователя можно запи сэть в.виде . . - Кп(Тт-То) Кп- Af/ -Г - Тс fr-f.,-Tc 5:К„. Af.Tj,, Ь учетом того, что г вблизи установившегося режима. Тогда изменение фазы управлякяци импульсов для т-фазного преобразователя равно Hjifillu f Л-КП-ТО-Р -дп,( m -30 т.е. пропоЕЯ1Ионально рассогласова,нию по скорости вращения двигателя Временной интервал TO выбирают из условия получения предварительного сдвига импульсов и,пр при д п О н Tt величину Введение коррекции по производн скорости вращения электропривода производят в зависимости от приращения периода последовательности и пульсов управления. При этом относительное изменение фазы управляющ импульсов (угла открытия вентилей) для однофазного преобразователя можно записать в виде KD(Tj -Ti--i) t(Mfji:Tr.Tj-, и TC Т{.в обла принимая К р ТИ f (. г- f Y ЕЫр&( ение (11) можно за писать в виде Ad-n Kg-AfV K,j.Тогда изменение фазы управляющих импульсов для т-фазного преобразов теля равно р-Кг.ЙВ .(13 , 2JiKa. df icLjj g т-30 dt т.е. пропорционально первой производной по скорости вращения электр привода. В области f (Ч & ff можно принять Т д небольшой ошибкой тогда коэффициент К у , т.е. он не зависит от величины текущего периода импульсов управления. Такое д пущение правомочно, так как коэффи циент пропорциональности при коррек ции по производной в промышленных системах допускается устанавливать с г огршиностью 20%. ри введении коррекции по рассог ласованию и производной скорости общее выражение для сдвига по фазе иглпульсов управления запишется с учетом выражений (9), (10), (13) в виде Ad uVAAr Ad .Тр.йп undi я 5 ГйГ/ т.е. реализуется ПИД-закон регулирования скорости вращения электропривода. Способ позволяет вводить, коррекцию и по току преобразователя, т.е. строить комбинированные систеьм управления. Для этого ток преобразователя преобразуют в аналоговый сигнал, например, напряжение постоянного тока, корректируют его известными способами по требуемому закону JJ производят в зависимости от него дополнительный сдвиг по фазе импульсов управления. Б замкнутой системе сравнения по фазе при резких и больших по величине возмущениях, когда uf становится велико, сдвиг fio фазе превышает допусти1 ый диапазон регулирования угла открытия вентилей, что приводит к опрокидыванию регулированию биений (выход их синхронизма) . Для защиты от опрокидывания регулирования ограничивают диапазон сдвига по фазе импульсов управления, например, с помощью формирования из напряжения питающей сети импульсов, ограничивающих временной интервал, соответствующий диапазону изменения угла открытия вентилей. Способ позволяет также произво- дить ограничение тока преобразователя за счет того, что при достижении сигналом, пропорциональным скорректированному по току преобразователя опорному сигналу, соответствующему току ограничения преобразователя, на вентили вьщают ограничивающие импульсы, соответствующие напряжению, уменьшакадему ток преобразователя. На фиг.1 изображена блок-схема цифровой системы фазового управления асинхронным вентильным электроприводом; на фиг.2 - схема блока дискретной коррекции, формирующей сдвиг по фазе, пропорциональный сядибке по скорости вращения электропривода; на фиг.З - то же, пропорциональный производной скорости вращения электропривода j на фиг,4 - ,то же, пропорциональный ошибке и производной скорости вращения электропривода; на фиг.З - то же, пропорциональный сигналу коррекции,зависящему от тока |1реобразователяг на фиг.6 - схема |5лока ограничения углов включения вентилей Цифровое устройство фазового управления асинхронным вентильным электрояринодом содерЛит асинхронный электродвигатель 1, вентильный преобразователь 2 или 3., подключенный соответственно к цепям статора или ротора в зависимости от способа воздействия на электродвигатель. Датчик
4 частоты скольжения электродвигателя, формирователи 5 и 6 импульсов, датчик 7 тока, распределитель В им|пульсов, блок 9 ограничения углов включения вентилей, блок 10 формирователей-усилителей, компаратор 11, блок 12 дискретной коррекции, блок 13 аналоговой коррекции, цифровой задатчик 14 числа, цифровой задатчик 15 интенсивности, генератор 16 эталонной частоты, счетчики-делители 17 и 18, счетчик-измеритель 19 периода, регистр 20 памяти, неуправляемый делитель 21 частоты, группа элементов И 22, блоки 23 и 24 переноса кода, схемы ИЛИ 25 и 26 и элементы 27-29 задержки.
Вход фор адрователя 5 импульсов подключен к обмоткам ротора (для фазного электродвигателя) или к выходу датчика 4 электромагнитного поля (частоты скольжения), установленного у вала короткозамкнутого электродвигателя нормально потоку рассеяния ротора. Выход формирователя 5 подключен к входу обнуления регистра 20 и ко входу элемента 28 задержки, выход которого подключен к управлякмдим входам блока 24 переноса кода и к входу элемента 29 задержки, выход которого подключен к входу обнуления счетчика 19. Выход генератора 16 подключен к импульсному входу задатчика 15 интенсивности, к первому входу схекы ИЛИ 25 и через неуправляемый делитель 21 частоты к счетному входу счетчика 19, выходы разрядов которого подключены через блок 24 переноса кода к входам разрядов регистра 20 памяти, выходы разрядов которого подключены через блок 23 переноса кода к входам разрядов счетчика-делителя 18, счетный вход которого соединен со счетным входом счетчика-делителя 17 и подключен к выходу схемы ИЛИ 25, второй вход которой подключен через элемент 27 Зсщержки к выходу схемы ИЛИ 26, входы которой подключены к выходам группы элементов И 22,первые и вторые входы которой подключены соответственно к выходам разрядов счетчика-делителя 17 и задатчика 15 интенсивности, входы которого подключены к выходам цифрового задатчика 14 числа. Выход счетчикаделителя 18 подключен к управляющим входам блока 23 переноса кода и к первому входу блока 12 дискретной коррекции, второй вход которого подключен к источнику уставок коррекции, третий вход подключен к выходу блока 13 аналоговой коррекции а выход подключен к сдвигающему входу распределителя 8 импульсов, выходы которого подключены к первым входам блока 9 ограничения углов включения вентилей, второй вход которого подключен к второму выходу формирователя 6 импульсов синхронизации, третий вход подключен к источнику уста-ки углов ограничения, четвертый вход подключен к выходу компаратора 11,
выходы подключены к входам блока 10 формирователей-у лителей, выходы которого подключены к управляющим входам вентилей преобразователя 2 или 3. Вход синхронизации распреде0 пителя 8 подключен к первому выходу формирователя 6, вход которогб подключен к источнику сетевого напряжения питания. Второй вход компаратора 11 подключен к источнику сигна5 па установки тока ограничения, первый вход подключен к второму выходу блока 13 аналоговой коррекции, второй вход которого подключен к источнику устанЬвки коррекции, а первый
Q вход - к выходу датчика 7 тока, подключенного входом к выходу вентильного преобразователя 2 или 3.
Блок 12 дискретной коррекции, формирующий сдвиг по фазе, пропор, циональный ошибке по скорости вращения электропривода (фиг.2), содержит последовательно соединенные блок 30 выделения разности временных интервалов, блок 31 изменения временного интервала и формирователь
0 импульсов 32, а также блок 33 опор- ,, ного временного интервала, подключенный выходом к второму входу блока 30, а входом - к первому входу блока 30, являющегося первым входом блока
5 12 дискретной коррекции. Второй вход блока 12 подключен к второму входу блока 31.
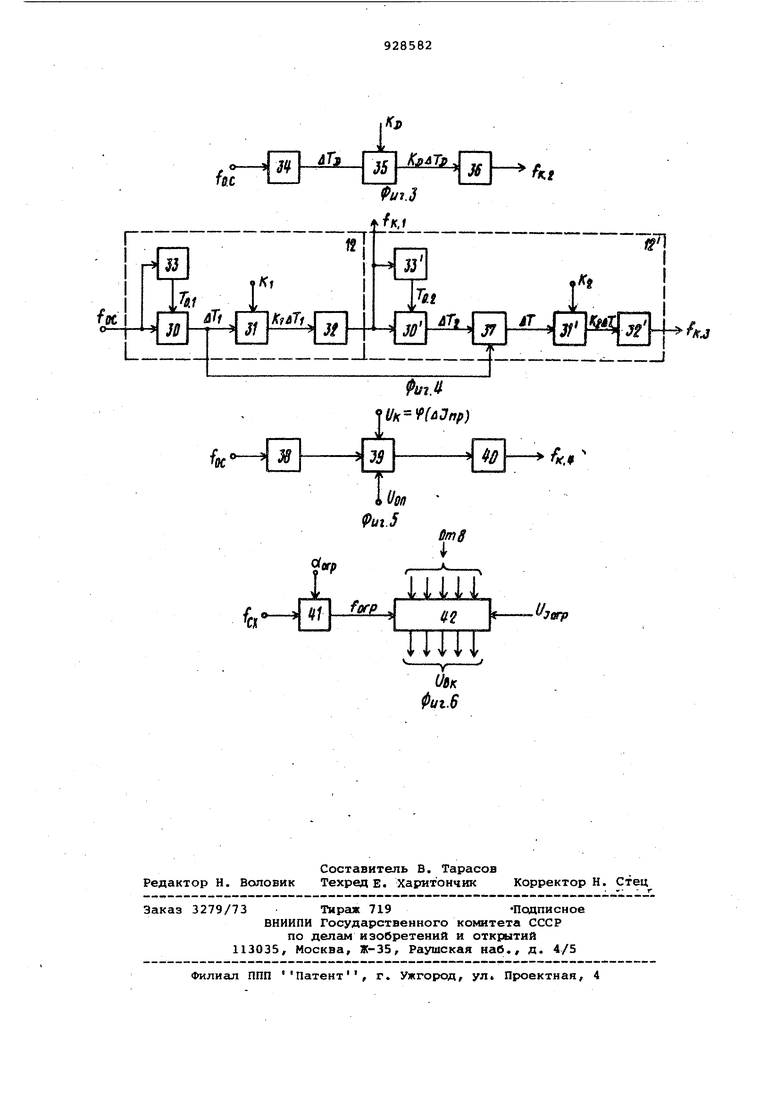
Блок дискретной коррекции, формирующий сдвиг по фазе, пропорциональный производной скорости вращения электропривода (фиг.З), содержит последовательно соединенные блок 34 выделения приращения временного интервала, блок 35 изменения временного интервала и формирователь 36 импульсов. Причем первый вход блока 12 подключен к входу блока 34, а вторЬй вход блока 12 подключен к второму входу блока 35. Блок дискретной коррекции, фО1 шрующий сдвиг по фазе, пропорциональный ошибке и по скорости производной скорости вращения электропривода (фиг.4) представляет собой два последовательно
5 соединенных блока 12 дискретной коррекции, формирующего сдвиг по фазе, пропорционсшьный ошибке по скорости вращения электропривода (фиг.2), причем во вторсм блоке 12 между блоKctMH 30 и 31 установлена дополни0тельно схемаИ 37, второй вход которой подключен к выходу блока 30 в первом блоке 12. Блок дискретной коррекции. Формирующей сдвиг по фазе, пропорциональный сигналу коррек дни, зависящему от тока преобразователя (фиг. 5), содержит последовательно соединённые блок 38 фор шрования развертывающего напряжения, компаратор 39 и формирователь 40 импульсов, причем первый вход блока дискретной коррекции подключе к входу блока 38, а второй и третий - к второму и третьему входам блока 39. Блок 9 ограничения углов включения вентилей преобразователя (фиг.6) содержит последовательно соединенные блок 41 формирования импульсов ограничения и логический блок 42 сравнения, входы которого подключены к первым входам и к четвертому входу блока 9, второй и тре тий входы которого подключены к вхо дам блока 41. Устройство работает следующим образом. На выходе формирователя 5 формируется последовательность импульсов период следования которых пропорцио нален периоду изменения тока ротора Ту,. Для фазного асинхронного электродвигателя эти импульсы формируют ся в моменты перехода через нуль на пряжения ротора путем подключения фаз обмоток ротора и нуль-органам. При этом, для трехфазной обмотки ротора на выходе формирователя обра зуется последовательность импульсов с частотой 6 fр. Для короткозамкнутого асинхронного электродвигателя эти импульсы формируются в моменты перехода через нуль сигнала датчика 4 электромагнитного поля установленного нормально потоку рассеяния ротора около вала вне или внутри корпуса асинхронного электродвигате ля.. При расположении датчика 4 внут ,ри корпуса электродвигателя легко решается проблема вэривозащиты. В качестве датчика 4 электромаг нитного поля мбжет быть использована, например, катушка индуктивности с феррсадагнитным сердечником, в кот рой наводится ЭДС с частотой тока ротора, поскольку поток рассеяния ротора изменяется с частотой тока ротора. В качестве датчика 4 может быть использован также гальваномагнитный полупроводниковый элемент,на пример, датчик Холла, магниторезистор, магнитодиод, магнитотранзистор, магнитотиристор или комбинированйый магнитный прибор. Если выход ной сигнал датчика подключить ко вх цу|нуль-органа, то в моменты перехо да вьгходным напряжением датчика на его выходе формируются импульсы с частотой 2 fр. Каждый импульс с выхода формирователя 5 поступает на вход обнуления регистра 20 памяти, сбрасывая записанный в нем код. Затем, после задержки в элементе 28, импульс открывает блок 24, через который из счетчика 19 в регистр 20 памяти записывается новое значение кода. Наконец после задерзкки в элементе 29, импульс поступает на вход обнуления счетчика 19, сбрасывая имекмдийся в нем код. После этого в счетчике 19 произвешится подсчет импульсов частоты с выходанеуправляемого делителя 21, подключенного входом к выходу генератора 16 эталонной частоты. Коэффициент деления 8. делителя 21 выбирается вЗависимости от коэффициента А пропорционашьносги частоты тока ротора, формируемой на выходе формирователя 5. ЕСЛИ коэффициент AI 2 (для короткозамкнутого асинхронного электродвигателя, когда формирователь 5 подключается к выходу датчика 4 частоты скольжения), то коэффициент деления делителя 21 равен Вц . Если Аф (для фазного асинхронного электродвигателя,когда формирователь 5 подключается к трем фазам обмотки ротора двигателя), то коэффициент деления делителя 21 равен 6ф - и для трехфазного мостового вентильного преобразователя, у которого m б, Вф 1, т.е. делитель 21 не устанавливается. В счетчике 19 производится подсчет импульсов частоты - между двумя импульсами частоты fpA, поступающими с выхода формирователя 5. После окончания очередного цикла подсчета в счетчике 19 образуется код -rp s7l-i пропорциональный закончившемуся периоду следования напряжения рото- ра и обратно пропорциональный фазности вентильного преобразователя. Этот код переписывается в регистр 20 и является коэффициентом деления счетчика-делителя 18, образующего совместно с блоком 23 переноса кода, открываемого импульсами с выхода счетчика 18, управляекшй делитель частоты. В счетчике-делителе 18 делится частота f-f,поступающая с выхода схемы ИЛИ 25. Счетик -делитель 17, группа элементов И 22, схемы ИЛИ 25 и 26 и элемент задержки 27 образуют преобразователь кода,формируемого на выходах цифрового задатчика 15 интенсивности,в частоту следования импульсов. Преобразователь код-частота предстгшляет со- бой двоичный умножитель частоты с положительной обратной связью. Импульсы частоты f/i с выхода элемента 27 задержки сдвинуты на относительно и{4пульсов частоты fg, поступающих с выхода генератора 16, что обеспечивает отсутствие одновременного прихода импульсов на схему ИЛИ 25, на выходе которой образуется последовательность шпульсов со средней частотой f д + fo.(14) Частота f на выходе схемы ИЛИ 26 двоичного умножителя ргшна f - - N 1 NO 5 где NO - объем счетчиков 17 в цифровом задатчике 15 интенсивности; N J заданный код, формируемый на выходах задатчика 15 интенсивности. Из выражений (14) и (15) получим No NOTN,J 0делителе 18 на коэффициент , и на выходе счетчика 18 образуется последовательность.импульсов с частотойо-Мо-т f -II.. (No-N3)fo-Tp N; P- f) -. | Если выбрать No noHNij выражение (17) соответствует выражению (б) . Таким образом на выходе счетчика делителя 18 непрерывно образуется последовательность импульсов обратной связи, являющихся импульсами управления. Заданная скорость враще НИН асинхронного электропривода N, устанавливается с,помощью цифрового задатчика 14 числа в десятичном коде. При уставке нового задания на выходе цифрового задатчика 15 интен сивности образуется линейно изменяю щийся до величины заданного кода Ыз(Ъ) со скоростью, определяемой частотой fо, поступающей на счетный вход задатчика 15 интенсивности.Ско рость изменения заданного кода меняется изменением коэффициента деле ния делителя частоты в задатчике интенсивности. Управляющие импульсы с выхода счетчика 18 поступают на сдвигающий вход распределителя 8 импульсов, который синхронизирован с сетью через формирователь 6. Импульсы управления Ugy с выходов распределителя 8 (число которых рав но фазности преобразователя) поступают -через блок 10 усилителей-формирователей на упргшляющие входы соответствующих вентилей преобразователя 2 или 3. Такая система управ ления, как отмечалось вьше, являетс астатической, т.е. формирует воздействие на электропривод в зависимости от интеграла от рассогласования по скорости вращения электропри вода в соответствии с выражением (9 Для улучшения динамики при резких и больших по величине возмущениях в системе может быть -применен блок 12 дискретной коррекции, позволяющий без специальных датчиков производить коррекцию с помощью дополнительного сдвига по фазе импульсов управления в зависимости от рассогл сования или производной скорости вращения электропривода, или тока преобразователя, или их различных комбинаций. В полном объеме воздействие на двигатель может произведено по ПИД-закону для скорости вращения электропривода и дополнительной коррекцией по току преобразователя. Рассмотрим работу блока 12 дискретной коррекции, в котором формируется дополнительный сдвиг по фазе в зависимости от рассогласования по скорости вращения электропривода (фиг;2). Импульсы обратной связи с выхода счетчика 18 поступают на входы блоков 30 и 33. По импульсу на входе в блоке 33 формируется опорный временный интервал TQ постоянной величины, привязанный началом к моменту поступления импульса. В блоке 30 определяется разность между временным интервалом, равным текущему периоду, и опорным временным интервалом, т.е. временный интервал между моментом окончания опорного временного интервала и следующим импульсом входной частоты f Сигнал ЛТ Т,,- Тр с выхода блока 30 поступает на вход блока 31, в котором производится изменение длительности временного интервала,т.е. умножение его на коэффициент К. Сигнал дТКп с выхода блока 31 поступает на вход формирователя 32, в котором формируется остроконечный импульс в момент окончания входного временного интервала. Изменение коэффициента пропорциональности Kf, производится установкой нового коэффициента временного интервала блока 31. Рассмотрим работу блока 12 дискретной коррекции, в котором формируется дополнительный сдвиг по фазе в зависимости от производной скорости вращения электропривода (фиг.З). Импульсы обратной связи foc выхода счетчика 18 поступают на вход блока 34, в котором формируется временный интервал, равный приращению периода импульсов обратной связи. Сигнал временного интервала д TD Т - Т поступает на блок 35 из- i менения временного интервала, где он умножается на коэффициент Кр,поступающий на второй вход блока 35. Сигнал временного интервала KjjuTjj поступает на формирователь 36, на выходе котооого формируется остроконечный импульс в момент окончания входного временного интервала. Тогда изменение фазы управляющих импульсов для т-фазного преобразователя соответствует выражению (13). Рассмотрим работу блока 12 дискретной коррекции, в котором формируется дополнительный сдвиг в зависимости от рассогласования и производной скорости вращения электропривода (фиг,4), Блок коррекции в этом случае содержит два последовательно соединенных блока (фиг.2), уде на втором блоке 12 между блоками 30 и 31 дополнительно включена И 37, второй вход которой Подключен к выходу блока 30 в перво Цлоке 12. На выходе блока 32 в первом блоке 12 формируются импульсы коррекции f 1, сдвинутые на величин К (Т,.-1 ), пропорциональную рассогласованию по скорости вращения электропривода. На входе блока 30 формируется временной интервал лТ Т| - И входе схемы И 37 формируется временной интервал, общий для дТо. и дТ и равный. йТ Т.;1-(Т,-.-,- T(j,) Тод (18) Так как Т: - ДТ , то, подставляя в (21) значение для Т получим ДТ Т-T,-K +ATiK +1hiK -To,Fi I (19) при TO 1о,а выражение (25) мож но записать в следующем виде дТ (1-К)Т-(I-IC)TO +4Т-К (1-К) ()+йТ,-К. Таким образом величина и Т. содержит временные интервалы, пропорциональные рассогласованию и производной скорости. Импульсы f ,/,j навыход блока 32 сдвигаются по фазе относительно входных на величину дТ-Kij. Общее выражение для сдвига по фазе импульсов управления при введении коррекции по скорости запишется t V Ad.-U,4ud,.uV-ra-( .0 Кг, (l-K)K,. TO, KD к,. Рассмотрим работу блока 12 дискретной коррекции, в котором формируется дополнительный сдвиг по фазе в зависимости от тока преобразовате ля. Аналоговый сигнал с датчика 7, подключенного к вентильному преобра зователю 2 или 3, поступает на вход блока 13 аналоговой коррекции в котором формируется корректирующий сихнал Цц 1(ДЧ) по требуемому закону в зависимости от изменения тока преобразователя. Этот сигнал поступает на один вход компаратора 39, на второй вход которого подается сигнал опорного напряжения Ug, а на третий - сигнал развертывающего напряжения с выхода блока 38, запускаемого импульсами обратной связ fgp «. Опорное напряжение UQ выбирае ся из расчета предварительного сдви га на величину Тс./1гп в установившемся режиме. При достижении сигналом развертывающего напряжения алгебраической суммы DO и и с выхода блока 13 на выходе компаратора 39 формируется сигнал, преобразуемый формирователем 40 в остроконечный импульс. За счет этого производится дополнительный сдвиг в зависимости от сигнала, скорректированного по току преобразователя. Для защиты замкнутой систе1.1ы регулирования от опрокидывания (выхода из синхронизма), возможного при больших и резких возмущениях, когда сдвиг по фазе превышает допустимый диапазон изменения угла управления, дополнительно устанавливается блок 9 ограничения углов включения вентилей, который может работать, например, следующим образом. В блоке 41 из сетевого напряжения в зависимости от уставок на углы.управления формируются ограничивающие импульсы. Блок 41 может работать, например, следующим образом. В момент естественного включения ..вентилей формируется развертывающее напряжение и в моменты достижения развертывающим напряжением уровней, соответствующих i и d мин t на выходе компаратора формируются ограничивающие импульсы. В сети, где напряжение не сильно искажено, ограничения могут быть сформированы в моменты достижения напряжением сети уровней, соответствующим граничным углам. Импульсы ограничения логически сравниваются по времени поступления с импульсами управления в блоке 42. Если импульс управления находится внутри временного интервала Между ограничивающими импульсами, то он пропускается на управляющий вход соответствующего вентиля. Если же импульс управления находится вне интервала между ограничивающими импульсами,т.е. когда сдвиг по фазе превышает возможности регулирования (допус- . тимого диапазона изменения угла управления), то на вентиль пропускается ограничивающий импульс. Этот режим соответствует насыщению системы регулирования, когда исполнительный механизм вентильный преобразователь) работает на упор до момента, пока система снова Не войдет в линейную область. Система позволяет также производить ограничение тока преобразователя. Для этого сигнал, пропорциональный току преобразователя от датчика тока 7 поступает на вход компаратора 11, гдеон сравнивается с установкой тока ограничения lorp.- При достижении током преобразователя I ,р тока ограничения на выходе компаратора 11 формируется сигнал, по которому в блоке 41 на вентили преобразователя шодаются ограничивающие импульсы, вызывающие уменьшение тока преобразователя. Для сглаживания релейных воздействий на преобразователь сигнал тока преобразователя предварительно корректируется в блоке 13. Устройство позволяет существенно упростить структуру и ее реализацию а также повысить надёжность за счет исключения специальных механически связанных с валом двигателя датчико скорости, промежуточных преобразова телей информации и системы импульсно-фазового управления вентильным преобразователем. Это дости гается за счет использования физической сущности процессов, протекаю щих в элементах системы. Так в качестве источника импульсов обратной связи используется сам асинхронный электродвигатель, а в качестве интегрального цифрового регулятора и СИФУ используется вентильный преобразователь, который работает как фазовый дискриминатор, вьщеляющий действующее йа двигатель напряжение пропорционально сдвигу фаз между импульсами синхронизации и управления. Отсутствие механических датчиков и многократного преобразования сигналов позволяет построить цифро-в вую систему управления полностью на дискретных элементах. Это существенно упрощает структуру, повышает ее стабильность и надежность. Систе ма обладает широкими функциональными возможностями, позволяющими прос тыми средствами вводить коррекцию по рассогласованию и производной скорости вращения электропривода, а также по току преобразователя, обеспечивая высокое качество перехо ных процессов. Устройство позволяет также ограничивать воздействие на преобразователь по углу управления и по току. Устройство обладает широ кой областью применения, поскольку охватывает все способы воздействия на асинхронный электропривод с помощью фазового управления вентильны преобразователем, установленным в цепях статора или ротора. Формула изобретения 1. Способ фазового управления асинхронным электродвигателем с обмотками, подключенными к питающей сети через вентильный преобразователь, синхронизированный сетью, при котором формируют опорную последовательность импульсов с частотой, кратной частоте сети, и управляющую последовательность импульсов, сдвинутую относительно первой на угол управления, которой комк утируют вен тили преобразователя, отличаю щ и и с я тем, что, с целью упрощения и повьииения надежности, измеряют частоту скольжения ротора и. умножая ее на коэффициент К ° , формируют управляющую последовательность импульсов., при этом величину угла управления ограничивают в заданном диапазоне, где Пд и nj синхронная и заданная скорости вращения, m - число фаз вентильного преобразователя. 2.Способ по п. 1, отличающийся тем, что формируют,дополнительный сигнал коррекции, по которому регулируют фазу сформированной управляющей последовательности импульсов . 3.Способ по пп. 1 и 2, о т л ичающийся тем, что сигнал коррекции получают путем измерения приращения периода управляющей последовательности импульсов. 4.Способ по пп. 1 и 2, о т л ичающийс я .тем, что сигнал, коррекции получают путем измерения разницы между текущим периодом управляющей последовательности импульсов и заданным постоянным временным интервалом. 5.Устройство для реализации способа по п. 1, содержащее управляемый т фазный вентильный преобразователь напряжения, снабженный выводами для подключения к обмоткам асинхронного электродвигателя, управляющие входы вентилей указанного преобразователя подключены через блок формирователей-усилителей к выходам распределителя импульсов, вход синхронизации которого подключен к выходу формирователя импульсов синхронизации, снабженного выводами для подключения к сети, преобразователь код-частота, состоящий из схемы ИЛИ, группы элементов И и счетчика-делителя, цифровой, задатчик числа, подключенный выходами к входам разрядов цифрового 3 1датчика интенсивности, импульсный вход которого подключен к выходу генератора эталонной частоты, а выходы его разрядов подключены к первым входам группы элементов И-, к вторым входам которых подключены выходы разрядов счетчика-делителя, а выходы указанных элементов И подключены к входам схемы ИЛИ, блоки переноса кода, регистр памяти, три элемента задержки, отличающееся тем, что, с целью упрощения систеки и повышения ее надежности, в него введены датчик частоты скольжения, второй счетчик-делитель, счетчик-измеритель периода, неуправляемый делитель частоты, вторая схема ИЛИ и второй формирователь импульсов синхронизации, подключенный ,к выходу датчика частоты скольжения электродвигателя, выход генератора
эталонной частоты подключен к первому входу второй схемы ИЛИ, второй вход которой подключен через первый элемент задержки к выходу первой схемы ИЛИ, а выход второй схемы ИЛИ подключен к счетному входу счетчикаделителя преобразователя код-частота йк счетному входу второго счетчИка{делитепя, входы разрядов которого шодключены через первый блок переноса кода к выходам разрядов регистра памяти, входы разрядов которого через второй блок переноса кода подключены к выходам разрядов счетчика;Измерителя периода, счетный вход которого подключен через неуправляемый делитель частоты к выходу генератора эталонной частоты, выход второго формирователя импульсов синхронизации подключен к входу обнуления регистра памяти и к входу второго элемента задержки, выход которого подключен к управляющему входу второго блока переноса кода и к входу третьего элемента задержки, выход которого подключен к входу обнуления счетчика-измерителя периода, а выход второго счетчика«-делителя подключен к управляющему входу первого блока переноса кода и к сдвигающему входу распределителя импульсов.
6.Устройство по п.. 5, отличающееся тем, асинхронный электродвигатель.выполнен с фазным ротором, а датчик частоты скольжения электродвигателя - в виде индукционного датчика переменного напряжения, выходные обмотки которого подключены к фазам обмотки ротора асинхронного электродвигателя.
7.Устройство по п. 5, о т л ич. ающееся тем, что асинхронный электродвигатель выполнен с короткозашснутым ротором, а датчик частоты сколья ения электродвигателя выполнен в виде датчика электромагнитного поля, установленного нормально потоку рассеяния ротора.
8.Устройство по пп. 5 и 7, отличающееся тем, что датчик электромагнитного поля выполнен в виде катушки индуктивности с ферромагнитным сердечником.
9-. Устройство по пп. 5 и 7, о тличающееся тем, что датчик электромагнитного поля выполнен в йиде гальваномагнитного элемента, например, датчика Холла или магнитоди да, или магниторезистора, или ма.гнйтотиристора, или комбинированного магнитного прибора.
Ю. Устройство по п. 5, отличающееся тем, что, с целью улучшения динамических характеристик, в Него введены Источник уставки коррекции и блок дискретной коррекции, включенный между входом распределителя импульсов и выходом
второго счетчика-делителя, причем второй вход блока дискретной коррек.ции подключен к источнику уставки коррекции.
11.Устройство по п. 5, отличающееся тем, что в него введены источник усташки ограничени углов включения вентилей и блок ограничения углов включения вентилей, подключенный между выходами распределителя импульсов и входами блока формирователей-усилителей, причем второй вход блока ограничения углов включения.вентилей подключен к второму ВЕйходу пеового Фоомирователя импульсов синхронизации, а третий вход - к источнику уставки ограничения углов включения вентилей.
12.Устройство по пп. 5 и 10, отличающееся тем, что в него введены источник уставки аналоговой коррекции, блок аналоговой коррекции и датчик тока, подключенный входом к выходу управляемого т-фазного вентильного преобразователя, а выходом - к блоку аналоговой коррекции, выход которого подклочен к третьему входу блока дискретной коррекции, второй вход блока аналоговой коррекции подключен к источнику уставки аналоговой коррекции.
13.Устройство по пп. 5, 11 и 12 отличающееся тем, что в него введены источник уставки тока ограничения и компаратор, а второй выход аналогового блока коррекции подключен к четвертому входу блока ограничения углов включения вентиле Через компаратор, второй вход которого подключен к источнику уставки тока ограничения.
14.Устройство по пп. 5 и 10, отличаю щеес я тем, что блок дискретной коррекции содержит блок опорного интервала и последовательно соединенные между собой блок выделения разности временных интервалов, блок изменения временного интервала и блок формирования импульсов, причем первый вход блока дискретной коррекции подключен к входам блока выделения разности временных интервалов и блока опорного временного интервала, второй вход блока дискретной коррекции подключен к второму входу блока изменения временного интервала, а выход блока опорного временного интерваша подключен к второму входу блока выдления разности временных интервалов
15.Устройство по пп. 5 и lO,o тличающеес я тем, что в бло дискретной коррекции введены последовательно соединенные между собой блок выделения приращения периода, блок изменения временных интервалов и блок формирования импульсов, причем первый вход блока дискретной коррекции подключен к входу блока вьаделения приращения периода, а второй вход - к второму входу блока изменения временньк интервалов.
16.Устройство по пп. 5 , 10 и 14, отличающееся тем, чт оно снабжено вторым блоком дискретной, коррекции, выполненным аналогично первому и последовательно с ним соеднненннм, и схемой И, включенной между блоком ВЁгделения разности временных интервалов и блоком изменения временного интервала, второй вход которой подключен к выходу блока выделения разйости временных интервалов первого блока дискретной коррекции.
17.Устройство lio пп. 5, 10 и 12, отличающееся тем, что
блок дискретной коррекции снабжен последовательно соединенными блоком развертывающего напряжения, компаратором и формирователем импульсов, причем первый вход блока дискретной коррекции подключен к блоку развертывающего напряжения, а третий вход к второму входу компаратора, третий вход которого подключен к источнику опорного напряжения.
18.Устройство по пп. 5,11 и 13, отличающеес я тем, что
в блок ограничения углов включения вентилей введены последовательно соединенные блок формирования имт пульсов ограничения и логический блок сравнения, причем первые входы блока ограничения углов включения вентилей соединены с втогмлми входам логического блока сравнения, второй и третий входы блока ограничения углов включения вентилей соединены с первым и вторым вг.одами блока формирования импульсов ограничения, а четвертый вход этого блока ограничения соединен с третьим входом логического блока сравнения.
Источники информации, принятые во внимание при экспертизе
1.ШубенкоВ.А., Браславский И.Я Гиристорный асинхронный .электропривод с фазовым управлением, М.,
Л., Энергия, 1972, с. 147-150.
2.Сандлер А.С., Тарасенко Л.М., Динамика каскадных асинхронных электроприводов, М., Энергия, 1977, с. 151-168.
3.Бирюков А.Б. и др. Влияние дискретизации и квантования сигнало на работу цифроаналогово.го регулятора скорости электропривода в стационарном режиме, Электрическая промышленность, серия Электропривод, вып. 8/67/, 1977./
L
jUsm
Фиг
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Вентильный электропривод постоянного тока | 1983 |
|
SU1098096A1 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Устройство для измерения скорос-Ти ВРАщЕНия АСиНХРОННОгО дВигА-ТЕля | 1978 |
|
SU794527A1 |
| Устройство для формирования скольжения асинхронного двигателя в частотно-регулируемом электроприводе | 1980 |
|
SU866682A1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Ротационный электровискозиметр | 1984 |
|
SU1276957A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для измерения скорости вращения асинхронного электродвигателя | 1977 |
|
SU690390A1 |
к
tivf
1
«
J
m.it
(jf,f)
fK.lt
l(/eff Риг.5
f
JL
iiUl
МУвГр
у 4 у i V
й7
Фиг.6