ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к передаче данных, а более точно к технологиям для выполнения пространственной обработки для передачи данных в многоантенной системе связи.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Многоантенная система связи применяет многочисленные передающие антенны и единственную или многочисленные принимающие антенны для передачи данных. Многоантенная система, таким образом, может быть системой с многими входами и многими выходами (MIMO) или системой с многими входами и одним выходом (MISO). Система MIMO применяет множество (NT) передающих антенн в передающем объекте и множество (NR) принимающих антенн в принимающем объекте при передаче данных и обозначается как система NR NT. Канал MIMO, сформированный NT передающими антеннами и NR принимающими антеннами, может быть разложен на NS пространственных каналов, где NS
NT. Канал MIMO, сформированный NT передающими антеннами и NR принимающими антеннами, может быть разложен на NS пространственных каналов, где NS min{NT, NR}. NS пространственных каналов могут использоваться для передачи данных таким образом, чтобы добиться большей надежности и/или более высокой общей пропускной способности. Система MISO применяет множество (NT) передающих антенн и единственную принимающую антенну при передаче данных. Канал MISO, сформированный NT передающими антеннами и единственной принимающей антенной, является состоящим из единственного пространственного канала.
min{NT, NR}. NS пространственных каналов могут использоваться для передачи данных таким образом, чтобы добиться большей надежности и/или более высокой общей пропускной способности. Система MISO применяет множество (NT) передающих антенн и единственную принимающую антенну при передаче данных. Канал MISO, сформированный NT передающими антеннами и единственной принимающей антенной, является состоящим из единственного пространственного канала.
Каждый пространственный канал может испытывать различные пагубные канальные воздействия, например, замирание, многолучевое распространение и влияние помех. NS пространственных каналов канала MIMO также могут испытывать разные канальные влияния и могут достигать разных отношений сигнал/шум и помеха (SNR). SNR пространственного канала определяет его пропускную способность, которая типично количественно определяется конкретной скоростью передачи данных, при которой могут надежно передаваться данные по пространственному каналу. Для меняющегося во времени беспроводного канала состояние канала меняется со временем, и SNR каждого пространственного канала также меняется со временем.
Чтобы максимизировать пропускную способность многоантенная система может использовать некоторую разновидность обратной связи, посредством которой принимающий объект оценивает пространственные канал(ы) и предоставляет информацию обратной связи, указывающую состояние канала или пропускную способность каждого пространственного канала. Принимающий объект затем может настраивать передачу данных по каждому пространственному каналу на основании информации обратной связи. Однако эта информация обратной связи может не быть доступной по различным причинам. Например, многоантенная система может не поддерживать передачу обратной связи из принимающего объекта или беспроводной канал может изменяться быстрее, чем скорость, с которой принимающий объект может оценивать беспроводной канал и/или отправлять обратно информацию обратной связи. В любом случае если передающий объект не имеет представления о состоянии канала, то ему может понадобиться передавать данные на низкой скорости с тем, чтобы передача данных могла надежно декодироваться принимающим объектом даже вопреки наихудшему состоянию канала. Эксплуатационные показатели такой системы диктовались бы ожидаемым наихудшим канальным состоянием, что является в высшей степени нежелательным.
Чтобы улучшить эксплуатационные показатели, когда информация обратной связи не доступна, передающий объект может выполнять пространственную обработку из условия, чтобы передача данных не придерживалась наихудшего канального состояния в течение длительного периода времени, как описано ниже. В таком случае для передачи данных может использоваться более высокая скорость. Однако эта пространственная обработка представляет дополнительную сложность для передающего объекта и возможно принимающего объекта.
Поэтому в данной области техники есть необходимость в технологиях для выполнения пространственной обработки с минимальной сложностью, чтобы улучшить производительность передачи данных в многоантенной системе связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технологии для формирования и использования управляющих матриц для псевдослучайного управления передачей (PRTS) описаны в материалах настоящей заявки. PRTS относится к пространственной обработке, выполняемой передающим объектом с помощью управляющих матриц с тем, чтобы передача данных придерживалась набора «эффективных» каналов. Эти эффективные каналы формируются реальным каналом MIMO или MISO, используемым для передачи данных, и управляющими матрицами, используемыми для PRTS. При PRTS передача данных не придерживается единственной реализации плохого канала в течение длительного периода времени, и эксплуатационные показатели не диктуются наихудшим канальным состоянием.
Управляющие матрицы могут формироваться из условия, чтобы упрощалось вычисление для PRTS. Множество управляющих матриц может быть сформировано, прежде всего, посредством выбора базовой матрицы, которая может быть матрицей Уолша, матрицей Фурье или некоторой другой унитарной матрицей, содержащей ортогональные столбцы. Затем выбираются разные комбинации скаляров, причем каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы, один скаляр на строку. Каждый скаляр может быть вещественным или комплексным значением. Разные управляющие матрицы формируются посредством умножения базовой матрицы на каждую из разных комбинаций скаляров, как описано ниже. Разные управляющие матрицы, таким образом, являются разными перестановками базовой матрицы и сохраняют определенные желательные (например, унитарную) характеристики базовой матрицы. Посредством выбора подходящей базовой матрицы (например, матрицы Уолша) и подходящих скаляров (например, +1, -1, +jи -j, где  элементы управляющих матриц находятся в множестве, состоящем из {+1,-1, +j, -j}. В этом случае перемножение символа данных с элементом управляющей матрицы может быть достигнуто простыми поразрядными операциями, как описано ниже.
элементы управляющих матриц находятся в множестве, состоящем из {+1,-1, +j, -j}. В этом случае перемножение символа данных с элементом управляющей матрицы может быть достигнуто простыми поразрядными операциями, как описано ниже.
Множество управляющих векторов, используемых для передачи MISO, может быть сформировано столбцами управляющих матриц. Каждый управляющий вектор также может рассматриваться как вырожденная управляющая матрица, содержащая только один столбец. Различные аспекты и варианты осуществления изобретения более подробно описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
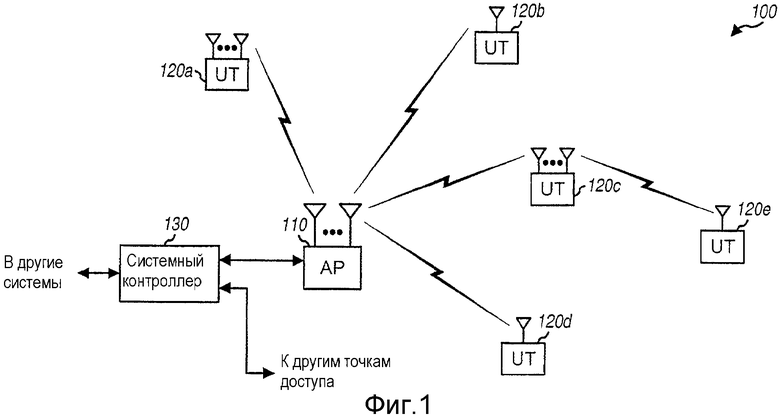
Фиг. 1 показывает многоантенную систему с точкой доступа и пользовательскими терминалами;
фиг. 2 показывает последовательность операций для формирования управляющих матриц и управляющих векторов, используемых для псевдослучайного управления передачей; и
фиг. 3 показывает структурную схему многоантенного передающего объекта, одноантенного принимающего объекта и многоантенного принимающего объекта.
ПОДРОБНОЕ ОПИСАНИЕ
Слово «примерный» используется в материалах настоящей заявки, чтобы иметь значение «служащий в качестве примера, отдельного случая или иллюстрации». Любой вариант осуществления, описанный в материалах настоящей заявки в качестве «примерного», не обязательно должен быть истолкован как предпочтительный или преимущественный над другими вариантами осуществления.
Фиг. 1 показывает многоантенную систему 100 с точкой 110 доступа (AP) и пользовательскими терминалами 120 (UT). Точка доступа обычно является стационарной станцией, которая поддерживает связь с пользовательскими терминалами и, к тому же, может упоминаться как базовая станция или некоторой другой терминологией. Пользовательский терминал может быть стационарным или мобильным и, к тому же, может упоминаться как мобильная станция, беспроводное устройство, абонентская аппаратура или некоторой другой терминологией. Системный контролер 130 присоединяется к точкам доступа и обеспечивает координацию и управление для этих точек доступа.
Точка 110 доступа оборудована множеством антенн для передачи данных. Каждый пользовательский терминал 120 может быть оборудован единственной антенной или множеством антенн для передачи данных. Пользовательский терминал может поддерживать связь с точкой доступа и, к тому же, может осуществлять одноранговую связь с другим пользовательским терминалом. В последующем описании передающий объект может быть точкой доступа или пользовательским терминалом, а принимающий объект также может быть точкой доступа или пользовательским терминалом. Передающий объект оборудован множеством (NT) передающих антенн, а принимающий объект может быть оснащен единственной антенной или множеством (NR) антенн. Передача MISO имеет место, когда принимающий объект оборудован единственной антенной, а передача MIMO имеет место, когда принимающий объект оборудован множеством антенн.
Система 100 может быть системой с единственной несущей или системой с многими несущими. Многочисленные несущие могут быть получены мультиплексированием с ортогональным частотным разделением каналов (OFDM), некоторыми другими технологиями модуляции многих несущих или некоторой другой конструкцией. OFDM эффективно разделяет всю ширину полосы пропускания системы на многочисленные (NF) ортогональные подполосы, которые также упоминаются как тоны, поднесущие, элементы разрешения и частотные каналы. При OFDM каждая подполоса ассоциативно связана с соответственной поднесущей, которая может модулироваться данными.
В системе 100 передающий объект может передавать данные принимающему объекту с использованием псевдослучайного управления передачей (PRTS), чтобы достичь улучшенных эксплуатационных показателей. При PRTS передающий объект выполняет пространственную обработку из условия, чтобы передача данных придерживалась набора эффективных каналов и не застревала на единственной реализации плохого канала в течение длительного периода времени. Следовательно, эксплуатационные показатели не диктуются наихудшим канальным состоянием.
Пространственная обработка в передающем объекте для псевдослучайного управления передачей может быть выражена как:
 х(m)=V(m)·s(m),
х(m)=V(m)·s(m),
где s(m) - вектор NT 1 с вплоть до NT символами данных, которые должны быть отправлены в диапазоне m передачи;
1 с вплоть до NT символами данных, которые должны быть отправлены в диапазоне m передачи;
V(m) - управляющая матрица NT NT, используемая для диапазона m передачи; и
NT, используемая для диапазона m передачи; и
х(m) - вектор NT 1 с NT символами передачи, которые должны быть отправлены с NT передающих антенн в диапазоне m передачи.
1 с NT символами передачи, которые должны быть отправлены с NT передающих антенн в диапазоне m передачи.
В качестве используемых в материалах настоящей заявки «символом данных» является символ модуляции данных, «контрольным символом» (пилот-символом) является символ модуляции для пилот-сигнала, а «символом передачи» является символ, который должен быть отправлен с передающей антенны. Контрольные символы известны априори как передающему, так и принимающему объекту.
Диапазон передачи может покрывать временное и/или частотное измерения. Для системы с одной несущей диапазон передачи может соответствовать одному периоду символа, который является интервалом времени для передачи одного символа данных. Для системы со многими несущими, такой как система MIMO, которая использует OFDM, диапазон передачи может соответствовать одной подполосе в одном периоде OFDM-символа. Диапазон передачи также может покрывать многочисленные периоды символов и/или многочисленные подполосы. Так, mможет быть показателем для времени и/или частоты. Диапазон передачи также может упоминаться как интервал передачи, интервал сигнализации, временной интервал или некоторой другой терминологией.
Псевдослучайное управление передачей может использоваться для достижения разнесения передачи, пространственного кодирования с расширением спектра, а также может использоваться в сочетании с управляемой модой, как описано ниже. Пространственная обработка в принимающем объекте также описана ниже.
1. Формирование управляющей матрицы
Передающий объект может выполнять пространственную обработку для псевдослучайного управления передачей с помощью множества управляющих матриц (или матриц передачи), которые могут быть обозначены как  или
или  для i=1...L, где L может быть любым целым числом, большим одного. Управляющие матрицы должны быть унитарными матрицами и удовлетворять следующему:
для i=1...L, где L может быть любым целым числом, большим одного. Управляющие матрицы должны быть унитарными матрицами и удовлетворять следующему:
 , для i=1 ... L, Рав. (2)
, для i=1 ... L, Рав. (2)
где  - единичная матрица с единицами по диагонали и нулями в других позициях. Каждая управляющая матрица
- единичная матрица с единицами по диагонали и нулями в других позициях. Каждая управляющая матрица  включает в себя NT столбцов и может быть выражена как
включает в себя NT столбцов и может быть выражена как  . Равенство (2) показывает, что каждый столбец
. Равенство (2) показывает, что каждый столбец  должен обладать единичной энергией, или
должен обладать единичной энергией, или  , для a=1...NT. Это условие гарантирует, что NT символов данных, переданных одновременно с использованием
, для a=1...NT. Это условие гарантирует, что NT символов данных, переданных одновременно с использованием  , имеют одинаковую мощность. Равенство (2) также показывает, что Эрмитово скалярное произведение любых двух столбцов должно быть нулем, или
, имеют одинаковую мощность. Равенство (2) также показывает, что Эрмитово скалярное произведение любых двух столбцов должно быть нулем, или  , для a=1...NT, b=1...NS, и
, для a=1...NT, b=1...NS, и  . Это условие гарантирует, что NT символов данных, передаваемых одновременно, ортогональны один по отношению к другому на передающих антеннах.
. Это условие гарантирует, что NT символов данных, передаваемых одновременно, ортогональны один по отношению к другому на передающих антеннах.
Множество L управляющих матриц может быть сформировано различными способами. В варианте осуществления L управляющих матриц формируются из базовой матрицы, которая предпочтительно является унитарной матрицей. Базовая матрица может использоваться в качестве одной из L управляющих матриц. Другие L управляющих матриц могут быть сформированы умножением строк базовой матрицы на разные скаляры, как описано ниже. Вообще, скаляр может быть любым вещественным или комплексным значением. Однако, чтобы гарантировать, что управляющие матрицы являются унитарными матрицами, скаляры выбираются обладающими единичным модулем и фазой между 0 и 2π (или 0° и 360°).
управляющих матриц могут быть сформированы умножением строк базовой матрицы на разные скаляры, как описано ниже. Вообще, скаляр может быть любым вещественным или комплексным значением. Однако, чтобы гарантировать, что управляющие матрицы являются унитарными матрицами, скаляры выбираются обладающими единичным модулем и фазой между 0 и 2π (или 0° и 360°).
В одном из вариантов осуществления базовая матрица является матрицей Уолша. Матрица  Уолша 2
Уолша 2 2 и матрица
2 и матрица  Уолша 44 могут быть выражены как:
Уолша 44 могут быть выражены как:
 и
и  Рав. (3)
Рав. (3)
Матрица  Уолша большей размерности может быть сформирована из матрицы Уолша
Уолша большей размерности может быть сформирована из матрицы Уолша  меньшей размерности, как изложено ниже:
меньшей размерности, как изложено ниже:
 . Рав. (4)
. Рав. (4)
Как показано равенством (4), матрицы Уолша имеют размерности, которые являются степенями двойки (например, 2, 4, 8 и так далее), вследствие способа, которым эти матрицы формируются.
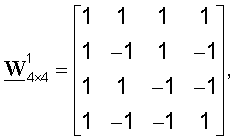
Для системы NR , при NR
, при NR 2, четыре примерные управляющие матрицы могут быть сформированы из матрицы
2, четыре примерные управляющие матрицы могут быть сформированы из матрицы  Уолша следующим образом:
Уолша следующим образом:

где  равна
равна  ;
;
 получена умножением второй строки
получена умножением второй строки  на -1 или
на -1 или  ;
;
 получена умножением второй строки
получена умножением второй строки  на +j или
на +j или  ; и
; и
 получена умножением второй строки
получена умножением второй строки  на -j или
на -j или  .
.
Дополнительные управляющие матрицы могут быть сформированы умножением второй строки  на другие скаляры, например,
на другие скаляры, например,  и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже:
и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже:  и так далее, где масштабирование посредством
и так далее, где масштабирование посредством  имеет следствием, что каждый столбец из
имеет следствием, что каждый столбец из  имеет единичную энергию.
имеет единичную энергию.
Для системы NR , при NR
, при NR 4, четыре примерных управляющих матрицы могут быть сформированы из матрицы
4, четыре примерных управляющих матрицы могут быть сформированы из матрицы  Уолша, как изложено ниже:
Уолша, как изложено ниже:
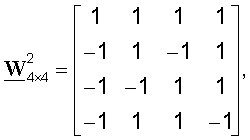
 и
и 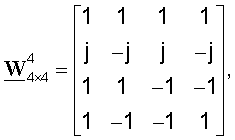
где  равна
равна  ;
;
 получена перемножением каждой из строк со 2 по 4
получена перемножением каждой из строк со 2 по 4  с
с  ;
;
 получена перемножением каждой из строк со 2 по 4
получена перемножением каждой из строк со 2 по 4  с +j; и
с +j; и
 получена перемножением строки 2
получена перемножением строки 2  с +j.
с +j.
Множество L управляющих матриц может быть сформировано, как изложено ниже:  и так далее, где масштабирование посредством
и так далее, где масштабирование посредством  имеет следствием, что каждый столбец
имеет следствием, что каждый столбец  имеет единичную энергию.
имеет единичную энергию.
Вообще, для базовой матрицы N N каждая из строк со 2 по N базовой матрицы может быть независимо умножена на один из K разных возможных скаляров. Так,
N каждая из строк со 2 по N базовой матрицы может быть независимо умножена на один из K разных возможных скаляров. Так,  разных управляющих матриц могут быть получены из
разных управляющих матриц могут быть получены из  разных перестановок K скаляров для N-1 строк. Например, каждая из строк со 2 по N может быть независимо умножена на скаляр
разных перестановок K скаляров для N-1 строк. Например, каждая из строк со 2 по N может быть независимо умножена на скаляр  ,
,  ,
,  или
или  . В этом случае для N=4 64 разных матрицы могут быть сформированы из матрицы
. В этом случае для N=4 64 разных матрицы могут быть сформированы из матрицы  Уолша с помощью четырех разных скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например
Уолша с помощью четырех разных скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например  и так далее. Вообще, каждая строка базовой матрицы может быть умножена на любой скаляр, имеющий вид
и так далее. Вообще, каждая строка базовой матрицы может быть умножена на любой скаляр, имеющий вид  , где
, где  может быть любым значением фазы. К тому же, вообще, управляющие матрицы N
может быть любым значением фазы. К тому же, вообще, управляющие матрицы N N могут быть сформированы из матриц N
N могут быть сформированы из матриц N N Уолша как
N Уолша как  , где
, где 
 .
.
Управляющие матрицы, выведенные на основании матрицы Уолша, имеют определенные желательные свойства. Если строки матрицы Уолша умножаются на скаляры ±1 и ±j,то каждый элемент результирующей управляющей матрицы будет равен +1, -1, +j или -j и, таким образом, имеет не нулевое значение только для вещественной или мнимой составляющей. В этом случае перемножение символа данных с элементом управляющей матрицы может быть выполнено простыми поразрядными операциями. Например, умножение комплекснозначного символа a + jb данныхна -1 может быть выполнено инвертированием знакового разряда обеих, вещественной и мнимой, составляющих символа данных, или (a + jb)(-1+j0)= . Умножение на +j может быть выполнено обменом местами вещественной и мнимой составляющих символа данных и инвертированием знакового разряда вещественной составляющей, или (a+jb)(
. Умножение на +j может быть выполнено обменом местами вещественной и мнимой составляющих символа данных и инвертированием знакового разряда вещественной составляющей, или (a+jb)( j)=
j)= . Умножение на -j может быть выполнено обменом местами вещественной и мнимой составляющих символа данных и инвертированием знакового разряда обеих, вещественной и мнимой, составляющих, или (a+jb)(
. Умножение на -j может быть выполнено обменом местами вещественной и мнимой составляющих символа данных и инвертированием знакового разряда обеих, вещественной и мнимой, составляющих, или (a+jb)( j)=
j)= . Таким образом, если элементы L управляющих матриц находятся в множестве, состоящем из
. Таким образом, если элементы L управляющих матриц находятся в множестве, состоящем из  , то вычисление, выполняемое передающим объектом для псевдослучайного управления передачей, может быть значительно упрощено.
, то вычисление, выполняемое передающим объектом для псевдослучайного управления передачей, может быть значительно упрощено.
В еще одном варианте осуществления базовая матрица является матрицей Фурье. Матрица  Фурье
Фурье  равна матрице
равна матрице  Уолша, или
Уолша, или  =
= . Матрица
. Матрица  Фурье
Фурье  и матрица
и матрица  Фурье
Фурье  может быть выражена как:
может быть выражена как:
 и
и 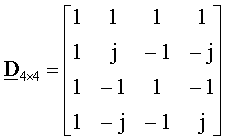 . Рав. (5)
. Рав. (5)
Вообще, для матрицы  Фурье
Фурье  элемент dn,m в n-й строке m-го столбца
элемент dn,m в n-й строке m-го столбца  может быть выражен как:
может быть выражен как:
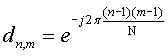 , для
, для  и
и 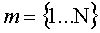 Рав. (6)
Рав. (6)
В отличие от матриц Уолша матрицы Фурье могут быть сформированы любой квадратной размерности (например, 2, 3, 4, 5 и так далее).
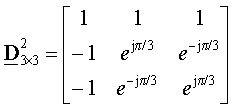
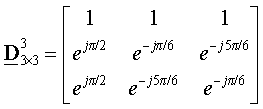
Для системы NR×3, при NR  3, четыре примерных управляющих матрицы могут быть сформированы из матрицы
3, четыре примерных управляющих матрицы могут быть сформированы из матрицы  Фурье, как изложено ниже:
Фурье, как изложено ниже:
 ,
,  ,
,
 и
и 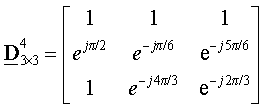 ,
,
где  равна
равна  ;
;
 получена перемножением каждой из строк 2 и 3
получена перемножением каждой из строк 2 и 3  с -1;
с -1;  получена перемножением каждой из строк 2 и 3
получена перемножением каждой из строк 2 и 3  с +j и
с +j и  получена перемножением строки 2
получена перемножением строки 2  с +j.
с +j.
Каждая из строк 2 и 3 может быть независимо перемножена со скаляром +1,  или
или  . Для N =3 всего 16 управляющих матриц может быть сформировано с помощью четырех скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например
. Для N =3 всего 16 управляющих матриц может быть сформировано с помощью четырех скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например 


 и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже:
и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже: 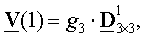
 и так далее, где масштабирование посредством
и так далее, где масштабирование посредством  имеет следствием, что каждый столбец
имеет следствием, что каждый столбец  обладает единичной энергией.
обладает единичной энергией.
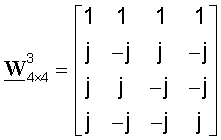
Для системы NR , при NR
, при NR  4, четыре примерных управляющих матрицы могут быть сформированы из матрицы
4, четыре примерных управляющих матрицы могут быть сформированы из матрицы  Уолша, как изложено ниже:
Уолша, как изложено ниже:
 ,
,  ,
,
 и
и 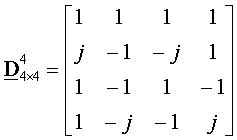 ,
,
где  равна
равна  ;
;
 получена умножением каждой из строк со 2 по 4
получена умножением каждой из строк со 2 по 4  на -1;
на -1;
 получена умножением каждой из строк со 2 по 4
получена умножением каждой из строк со 2 по 4  на +j; и
на +j; и
 получена умножением строки 2
получена умножением строки 2  на +j.
на +j.
Каждая из строк со 2 по 4 может быть независимо перемножена со скаляром +1, -1, +j или
или  . Для N=4 всего 64 управляющих матрицы может быть сформировано с помощью четырех скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например,
. Для N=4 всего 64 управляющих матрицы может быть сформировано с помощью четырех скаляров. Дополнительные управляющие матрицы могут быть сформированы с помощью других скаляров, например,  и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже:
и так далее. Множество L управляющих матриц может быть сформировано, как изложено ниже: 
 и так далее.
и так далее.
Для N=4 элементы матрицы  Фурье находятся в множестве
Фурье находятся в множестве  . Если строки
. Если строки  умножаются на скаляры
умножаются на скаляры  и
и  , то элементы результирующих управляющих матриц также находятся в множестве . В этом случае вычисление для пространственной обработки может быть упрощено, как описано выше.
, то элементы результирующих управляющих матриц также находятся в множестве . В этом случае вычисление для пространственной обработки может быть упрощено, как описано выше.
Для N=3 элементы матрицы  Фурье находятся в множестве, состоящем из
Фурье находятся в множестве, состоящем из  . Если строки
. Если строки  умножаются на скаляры
умножаются на скаляры  (поворот на
(поворот на  °),
°),  (поворот на
(поворот на  °),
°),  (поворот на
(поворот на  °),
°),  (поворот на
(поворот на  °),
°),  (поворот на
(поворот на  °) и
°) и  (поворот на
(поворот на  °), то элементы результирующих матриц таковы, что, по меньшей мере, одна из составляющих находится в множестве, состоящем из {0, +1, -1, +1/2, -1/2}. Умножение для этой составляющей может быть выполнено сдвигом (если необходимо для деления на 2) и инверсией знакового разряда (если необходимо). Умножение комплекснозначного символа данных,
°), то элементы результирующих матриц таковы, что, по меньшей мере, одна из составляющих находится в множестве, состоящем из {0, +1, -1, +1/2, -1/2}. Умножение для этой составляющей может быть выполнено сдвигом (если необходимо для деления на 2) и инверсией знакового разряда (если необходимо). Умножение комплекснозначного символа данных,  , на элемент такой управляющей матрицы, в таком случае, потребовало бы, самое большее, одного вещественного умножения для составляющей с модулем
, на элемент такой управляющей матрицы, в таком случае, потребовало бы, самое большее, одного вещественного умножения для составляющей с модулем  .
.
Фиг. 2 показывает блок-схему последовательности 200 операций способа формирования управляющих матриц и управляющих векторов, используемых для псевдослучайного управления передачей. Сначала получают базовую матрицу (этап 212). Базовая матрица может быть матрицей Уолша, матрицей Фурье или некоторой другой унитарной матрицей, содержащей ортогональные столбцы. Матрица Уолша может упростить вычисление для PRTS, но имеет размерность, которая является степенью двойки. Матрица Фурье может быть сформирована любой размерности, и определенные размерности (например, четыре) могут обеспечивать упрощенное вычисление для PRTS.
Затем выбирается другая комбинация скаляров для новой управляющей матрицы, которая должна быть сформирована (этап 214). Первая строка базовой матрицы типично не затрагивается (или умножается на +1), а каждая из других  строк может быть умножена на любой из K возможных скаляров, где, в общем,
строк может быть умножена на любой из K возможных скаляров, где, в общем,  и
и  . Выбранная комбинация может включать в себя скаляров для строк со 2 по N базовой матрицы, один скаляр на строку. K скаляров могут быть выбраны из условия, чтобы элементы результирующей матрицы имели форматы, которые могут упростить вычисление. Например, K может быть четырьмя, и четырьмя возможными скалярами могут быть +1,
. Выбранная комбинация может включать в себя скаляров для строк со 2 по N базовой матрицы, один скаляр на строку. K скаляров могут быть выбраны из условия, чтобы элементы результирующей матрицы имели форматы, которые могут упростить вычисление. Например, K может быть четырьмя, и четырьмя возможными скалярами могут быть +1,  , +j и
, +j и  . Для первой управляющей матрицы комбинацией скаляров могут быть все +1. Вообще, ноль, один или более скаляров в выбранной комбинации могут быть равны +1, каковое соответствует отсутствию изменения в строке базовой матрицы, перемножаемой с этим скаляром. В любом случае новая управляющая матрица формируется посредством умножения N
. Для первой управляющей матрицы комбинацией скаляров могут быть все +1. Вообще, ноль, один или более скаляров в выбранной комбинации могут быть равны +1, каковое соответствует отсутствию изменения в строке базовой матрицы, перемножаемой с этим скаляром. В любом случае новая управляющая матрица формируется посредством умножения N строк базовой матрицы на выбранную комбинацию N
строк базовой матрицы на выбранную комбинацию N скаляров (этап 216). Сформированная управляющая матрица может быть сохранена в памяти или сразу использована для пространственной обработки.
скаляров (этап 216). Сформированная управляющая матрица может быть сохранена в памяти или сразу использована для пространственной обработки.
Затем производится определение того, необходима или нет еще одна управляющая матрица (этап 218). Если ответом является 'да', то последовательность данных возвращается на этап 214 и выбирается другая комбинация скаляров для следующей управляющей матрицы. Если формируется множество L управляющих матриц, то используется L разных комбинаций скаляров с тем, чтобы дубликатные управляющие матрицы не формировались для множества. Если управляющие матрицы формируются «на лету», то комбинация скаляров для каждой управляющей матрицы может быть выбрана таким образом, чтобы избежать формирования дубликатных управляющих матриц, например, в пределах предопределенного количества диапазонов передачи.
Разные комбинации скаляров могут выбираться детерминированным образом, чтобы избежать дублирования. В качестве примера, для N=4 и K=4 может быть использован 3-разрядный 4-ичный счетчик, с тремя разрядами, являющимися помеченными как x, y и z. Разряд x может быть ассоциативно связан со строкой 2 базовой матрицы, разряд y может быть ассоциативно связан со строкой 3, а разряд z может быть ассоциативно связан со строкой 4. Каждый разряд имеет интервал значений от 0 до 3. Скаляр +1 может использоваться для строки 2 базовой матрицы, если x=0, скаляр -1 может использоваться, если x=1, скаляр +j может использоваться, если x=2, и скаляр -j может использоваться, если x=3. Разряды y и z подобным образом определяют, какие скаляры следует использовать, соответственно для строк 3 и 4 базовой матрицы. Счетчик может приращиваться на этапе 214 для каждой новой управляющей матрицы. Например, счетчик может отсчитывать от 000 до 003, затем от 010 до 013, затем от 020 до 023, затем от 030 до 033, затем от 100 до 103 и так далее, и, наконец, от 330 до 333. Три разряда (xyz)счетчика могли бы определять, какие скаляры следует использовать для строк со 2 по 4 базовой матрицы. Другие механизмы и схемы также могут использоваться для выбора разных комбинаций скаляров, чтобы использовать для строк базовой матрицы, чтобы формировать разные управляющие матрицы. После того, как на этапе 214 была выбрана другая комбинация скаляров, формируется еще одна управляющая матрица с использованием этой комбинации скаляров на этапе 216.
За этапом 218, если еще одна управляющая матрица не нужна (например, так как были сформированы все L управляющих матриц для множества), то может быть сформировано множество управляющих векторов, если необходимы для передачи MISO (этап 220). Управляющие векторы могут быть сформированы столбцами управляющих матриц, сформированных на этапах с 212 по 218. Затем последовательность операций завершается.
Управляющие матрицы, сформированные описанным выше образом, являются разными перестановками базовой матрицы, где перестановки определяются разными комбинациями скаляров. Скаляры выбираются обладающими единичным модулем с тем, чтобы управляющие матрицы были унитарными матрицами. Скаляры, кроме того, могут выбираться из условия, чтобы элементы управляющих матриц могли упрощать вычисление для PRTS. Элементы каждой управляющей матрицы, сформированной из матрицы Уолша или матрицы Фурье, также имеют равный модуль  , что упрощает масштабирование этих элементов и обеспечивает другие преимущества.
, что упрощает масштабирование этих элементов и обеспечивает другие преимущества.
Управляющие матрицы и управляющие векторы, используемые для псевдослучайного управления передачей, могут быть сформированы на основании базовой матрицы и сохранены в памяти. После этого одна управляющая матрица/вектор может быть выбрана для использования для каждого диапазона передачи, и выбранная управляющая матрица/вектор извлекается из памяти. В качестве альтернативы управляющие матрицы/векторы могут формироваться в реальном времени, по мере их необходимости.
Как отмечено выше, каждый управляющий вектор может рассматриваться как вырожденная управляющая матрица, содержащая только один столбец. Таким образом, в качестве используемой в материалах настоящей заявки матрица может содержать в себе единственный или многочисленные столбцы.
2.Выбор управляющей матрицы
L управляющих матриц в множестве могут выбираться для использования различными способами. В одном из вариантов осуществления управляющие матрицы выбираются из множества L управляющих матриц детерминированным образом. Например, L управляющих матриц могут циклически проходиться и выбираться в последовательном порядке, начиная с  , затем
, затем  и так далее, и затем
и так далее, и затем  . В еще одном варианте осуществления, управляющие матрицы выбираются из множества псевдослучайным образом. Например, управляющая матрица для использования для каждого диапазона m передачи может выбираться на основании функции
. В еще одном варианте осуществления, управляющие матрицы выбираются из множества псевдослучайным образом. Например, управляющая матрица для использования для каждого диапазона m передачи может выбираться на основании функции  , которая псевдослучайным образом выбирает одну из L управляющих матриц, или
, которая псевдослучайным образом выбирает одну из L управляющих матриц, или  . В еще одном другом варианте осуществления управляющие матрицы выбираются из множества «перестановочным» образом. Например, L управляющих матриц могут циклически проходиться и выбираться для использования в последовательном порядке. Однако начальная управляющая матрица для каждого цикла может выбираться псевдослучайным образом, вместо всегда являющейся
. В еще одном другом варианте осуществления управляющие матрицы выбираются из множества «перестановочным» образом. Например, L управляющих матриц могут циклически проходиться и выбираться для использования в последовательном порядке. Однако начальная управляющая матрица для каждого цикла может выбираться псевдослучайным образом, вместо всегда являющейся  . L управляющих матриц также могут выбираться другими способами.
. L управляющих матриц также могут выбираться другими способами.
Выбор управляющей матрицы также может быть зависимым от количества управляющих матриц (L) в множестве и количества диапазонов передачи (M) в блоке передачи, через который должно применяться псевдослучайное управление передачей. Блок передачи может соответствовать пакету данных, кодовому блоку или кодовому слову, OFDM-символу, модулю данных протокола (PDU) и так далее. Вообще количество управляющих матриц (L) может быть большим, равным или меньшим, чем длина (M) блока передачи. Если L=M, то другая управляющая матрица может быть выбрана для каждого из M диапазонов передачи для блока передачи. Если L<M, то управляющие матрицы повторно используются для каждого блока передачи. Если L>M, то подмножество управляющих матриц используется для каждого блока передачи. Для всех трех случаев управляющие матрицы могут выбираться детерминированным, псевдослучайным или перестановочным образом, как описано выше.
3.Передача MIMO
В системе 100 канал MIMO существует между многоантенным передающим объектом и многоантенным принимающим объектом. Для системы с единственной несущей канал MIMO, сформированный NT антеннами в передающем объекте и NR антеннами в принимающем объекте, может быть охарактеризован матрицей H частотной характеристики канала NR×NT, которая может быть выражена как:
 , Рав. (7)
, Рав. (7)
где составляющая  , для
, для  и
и  обозначает соединение или комплексный коэффициент передачи между передающей антенной
обозначает соединение или комплексный коэффициент передачи между передающей антенной  и приемной антенной
и приемной антенной  . Разный канал MIMO существует между каждой разной комбинацией многоантенного передающего объекта и многоантенного принимающего объекта. Для простоты канал MIMO предполагается полноранговым при NS=NT≤NR.
. Разный канал MIMO существует между каждой разной комбинацией многоантенного передающего объекта и многоантенного принимающего объекта. Для простоты канал MIMO предполагается полноранговым при NS=NT≤NR.
Для передачи MIMO передающий объект может выполнять пространственную обработку для псевдослучайного управления передачей, как изложено ниже:
 ,
,
где  - вектор с
- вектор с  символами передачи, которые должны отправляться с передающих антенн в диапазоне m передачи. Управляющая матрица
символами передачи, которые должны отправляться с передающих антенн в диапазоне m передачи. Управляющая матрица  для использования для каждого диапазона передачи может выбираться из множества L управляющих матриц, как описано выше. Если система использует OFDM, то один из подпотоков символов данных может отправляться в каждой подполосе, используемой для передачи данных. Передающий и принимающий объекты, в таком случае, могли бы выполнять пространственную обработку раздельно для каждой подполосы данных.
для использования для каждого диапазона передачи может выбираться из множества L управляющих матриц, как описано выше. Если система использует OFDM, то один из подпотоков символов данных может отправляться в каждой подполосе, используемой для передачи данных. Передающий и принимающий объекты, в таком случае, могли бы выполнять пространственную обработку раздельно для каждой подполосы данных.
Принятые символы в принимающем объекте могут быть выражены как:


где  - вектор с NR принятыми символами от NR приемных
- вектор с NR принятыми символами от NR приемных
антенн;
 является матрицей NT×NT частотной характеристики эффективного канала MIMO для диапазона m передачи, которой является
является матрицей NT×NT частотной характеристики эффективного канала MIMO для диапазона m передачи, которой является  ; и
; и
n(m)- вектор шума.
Для простоты шум предполагается аддитивным белым гауссовым шумом (AWGN) с нулевым вектором средних значений и ковариационной матрицей  , где
, где  - дисперсия шума, наблюдаемого принимающим объектом.
- дисперсия шума, наблюдаемого принимающим объектом.
Пространственная обработка в передающем объекте с помощью управляющей матрицы V(m) имеет следствием, что символы данных в s(m) придерживаются частотной характеристики эффективного канала MIMO, которая учитывает частотную характеристику  реального канала MIMO и управляющую матрицу
реального канала MIMO и управляющую матрицу  . Принимающий объект может выполнять оценку канала разными способами.
. Принимающий объект может выполнять оценку канала разными способами.
Если передающий объект передает контрольные символы без псевдослучайного управления передачей, то принимающий объект может получать оценку  непосредственно. Для простоты описание в материалах настоящей заявки предполагает оценку канала без ошибок. Принимающий объект может получать оценку
непосредственно. Для простоты описание в материалах настоящей заявки предполагает оценку канала без ошибок. Принимающий объект может получать оценку  для диапазона
для диапазона  передачи на основании контрольных символов, принятых от передающего объекта в этом диапазоне передачи. Если передающий объект передает символы данных в другом диапазоне
передачи на основании контрольных символов, принятых от передающего объекта в этом диапазоне передачи. Если передающий объект передает символы данных в другом диапазоне  передачи с использованием управляющей матрицы
передачи с использованием управляющей матрицы  , то принимающий объект может получать оценку
, то принимающий объект может получать оценку  для этого диапазона передачи, как изложено ниже:
для этого диапазона передачи, как изложено ниже:  . Частотная характеристика канала MIMO предполагается постоянной по диапазонам
. Частотная характеристика канала MIMO предполагается постоянной по диапазонам  и
и  передачи, так что
передачи, так что  . Вычисление для может быть упрощено, если
. Вычисление для может быть упрощено, если  формируется надлежащим образом, как описано выше.
формируется надлежащим образом, как описано выше.
Если передающий объект передает контрольные символы с псевдослучайным управлением передачей, то принимающий объект может получать оценку  непосредственно. Принимающий объект может получать оценку
непосредственно. Принимающий объект может получать оценку  для диапазона mp передачи на основе контрольных символов, принятых от передающего объекта в этом диапазоне передачи. Если контрольные символы переданы с использованием V(mp), то
для диапазона mp передачи на основе контрольных символов, принятых от передающего объекта в этом диапазоне передачи. Если контрольные символы переданы с использованием V(mp), то  Принимающий объект может затем вывести оценку H(mp) следующим образом:
Принимающий объект может затем вывести оценку H(mp) следующим образом: Если передающий объект передает символы данных в другом диапазоне md передачи, используя управляющую матрицу V(md), то принимающий объект может получить оценку для этого диапазона передачи следующим образом:
Если передающий объект передает символы данных в другом диапазоне md передачи, используя управляющую матрицу V(md), то принимающий объект может получить оценку для этого диапазона передачи следующим образом:  Снова, частотная характеристика MIMO подразумевается постоянной по диапазонам mp и md передачи, так что H(md)=H(mp). Вычисление H(mp) и может быть упрощено, если управляющие матрицы генерируются надлежащим образом.
Снова, частотная характеристика MIMO подразумевается постоянной по диапазонам mp и md передачи, так что H(md)=H(mp). Вычисление H(mp) и может быть упрощено, если управляющие матрицы генерируются надлежащим образом.
Принимающий объект может использовать интерполяцию и/или экстраполяцию для получения оценок частотной характеристики канала MIMO. Например, передающий объект может передавать контрольные символы по подмножеству NF всех подполос. Принимающий объект может получать оценку  частотной характеристики реального канала MIMO или оценку частотной характеристики эффективного канала MIMO для каждой подполосы
частотной характеристики реального канала MIMO или оценку частотной характеристики эффективного канала MIMO для каждой подполосы  контрольного сигнала (которая является подполосой с передачей контрольного сигнала) на основании контрольного символа, принятого по такой подполосе. Если принимающий объект получает
контрольного сигнала (которая является подполосой с передачей контрольного сигнала) на основании контрольного символа, принятого по такой подполосе. Если принимающий объект получает  , то он может выводить , как описано выше. Принимающий объект затем может интерполировать и/или экстраполировать для всех подполос контрольного сигнала, чтобы получить для всех интересующих подполос.
, то он может выводить , как описано выше. Принимающий объект затем может интерполировать и/или экстраполировать для всех подполос контрольного сигнала, чтобы получить для всех интересующих подполос.
Для каждого диапазона m передачи с передачей данных принимающий объект может выполнять пространственную обработку (или пространственную согласованную фильтрацию) над принятыми символами в с помощью , либо , чтобы получить вектор  детектированных символов, которые являются оценками переданных символов данных. Принимающий объект также может получать детектированные символы с использованием различных технологий обработки приемника, в том числе (1) технологии инверсии корреляционной матрицы канала (CCMI), которая также обычно упоминается как технология форсирования нуля, и (2) технологии минимальной среднеквадратической ошибки (MMSE).
детектированных символов, которые являются оценками переданных символов данных. Принимающий объект также может получать детектированные символы с использованием различных технологий обработки приемника, в том числе (1) технологии инверсии корреляционной матрицы канала (CCMI), которая также обычно упоминается как технология форсирования нуля, и (2) технологии минимальной среднеквадратической ошибки (MMSE).
Принимающий объект может выполнять пространственную обработку приемника с помощью оценки частотной характеристики эффективного канала MIMO. Таблица обобщает пространственную обработку приемника для технологий CCMI и MMSE с помощью . В таблице  - матрица пространственного фильтра для технологии CCMI,
- матрица пространственного фильтра для технологии CCMI,  - матрица пространственного фильтра для технологии MMSE, а
- матрица пространственного фильтра для технологии MMSE, а  - диагональная матрица для технологии MMSE (которая содержит диагональные элементы
- диагональная матрица для технологии MMSE (которая содержит диагональные элементы  ).
).





Принимающий объект также может выполнять пространственную обработку приемника с помощью оценки частотной характеристики реального канала MIMO. В этом случае принимающий объект выводит матрицу  пространственного фильтра на основании и с использованием, например, технологии CCMI или MMSE, в каковом случае заменяется на в таблице. Принимающий объект затем выполняет пространственную согласованную фильтрацию над с помощью
пространственного фильтра на основании и с использованием, например, технологии CCMI или MMSE, в каковом случае заменяется на в таблице. Принимающий объект затем выполняет пространственную согласованную фильтрацию над с помощью  , чтобы получить
, чтобы получить  , которая является оценкой
, которая является оценкой  , как изложено ниже:
, как изложено ниже:  . Принимающий объект также выполняет масштабирование с помощью
. Принимающий объект также выполняет масштабирование с помощью  для технологии MMSE. Принимающий объект затем выполняет пространственное декодирование, обратное кодированию с расширением спектра (или компенсацию), над
для технологии MMSE. Принимающий объект затем выполняет пространственное декодирование, обратное кодированию с расширением спектра (или компенсацию), над  с помощью , чтобы получить , как изложено ниже:
с помощью , чтобы получить , как изложено ниже:  .
.
Вышеприведенное описание предполагает полноранговый канал MIMO с NS=NT NR и передающий объект, использующий для пространственной обработки управляющие матрицы NT×NT. Если канал MIMO является недостаточным по рангу, так что NS<NT
NR и передающий объект, использующий для пространственной обработки управляющие матрицы NT×NT. Если канал MIMO является недостаточным по рангу, так что NS<NT NR, или если количество приемных антенн является меньшим, чем количество передающих антенн, так что NS=NR<NT, то передающий объект может выбирать и использовать для пространственной обработки NS столбцов каждой управляющей матрицы NT×NT. В этом случае
NR, или если количество приемных антенн является меньшим, чем количество передающих антенн, так что NS=NR<NT, то передающий объект может выбирать и использовать для пространственной обработки NS столбцов каждой управляющей матрицы NT×NT. В этом случае  является вектором
является вектором  с
с  символами данных для потоков символов данных, а xmimo,pr(m) является вектором NT×1 с NT символами передачи для NT передающих антенн. Передающий объект может масштабировать каждый символ данных в или каждом символе передачи в посредством
символами данных для потоков символов данных, а xmimo,pr(m) является вектором NT×1 с NT символами передачи для NT передающих антенн. Передающий объект может масштабировать каждый символ данных в или каждом символе передачи в посредством  с тем, чтобы полная мощность передачи, имеющаяся в распоряжении для каждой передающей антенны, использовалась для передачи NS потоков символов данных.
с тем, чтобы полная мощность передачи, имеющаяся в распоряжении для каждой передающей антенны, использовалась для передачи NS потоков символов данных.
Псевдослучайное управление передачей может использоваться для достижения разнесения передачи или пространственного кодирования с расширением спектра для передачи MIMO, в зависимости от того, каким образом применяются управляющие матрицы. Например, PDU, содержащий часть контрольного сигнала (используемую для оценки канала) и часть данных (несущую блок символов данных), может передаваться по многочисленным подполосам и в многочисленных периодах символов. Чтобы добиться разнесения передачи, передающий объект может использовать (1) разные управляющие матрицы по многочисленным подполосам, но (2) одну и ту же управляющую матрицу по псевдослучайно управляемой части PDU для каждой подполосы. В этом случае управляющие матрицы для PDU являются только функцией подполосы или  . Передающий объект может использовать по подполосам настолько много управляющих матриц, насколько возможно, чтобы добиться большего разнесения передачи.
. Передающий объект может использовать по подполосам настолько много управляющих матриц, насколько возможно, чтобы добиться большего разнесения передачи.
Чтобы добиться пространственного кодирования с расширением спектра, передающий объект может использовать (1) разные управляющие матрицы по многочисленным подполосам и (2) разные управляющие матрицы по псевдослучайно управляемой части PDU для каждой подполосы. В этом случае управляющие матрицы для PDU могли бы быть функцией как подполосы, так и периода символа, или  . Для пространственного кодирования с расширением спектра только принимающий объект адресата имеет сведения об управляющей матрице, используемой передающим объектом для каждой подполосы и каждого периода символа, и является способной выполнять комплементарное пространственное декодирование, обратное кодированию с расширением спектра, для восстановления переданного PDU. Другие принимающие объекты не имеют сведений об управляющих матрицах, а передача PDU происходит для этих объектов случайно в пространственном отношении. Как результат, эти другие принимающие объекты имеют низкую вероятность восстановления переданного PDU.
. Для пространственного кодирования с расширением спектра только принимающий объект адресата имеет сведения об управляющей матрице, используемой передающим объектом для каждой подполосы и каждого периода символа, и является способной выполнять комплементарное пространственное декодирование, обратное кодированию с расширением спектра, для восстановления переданного PDU. Другие принимающие объекты не имеют сведений об управляющих матрицах, а передача PDU происходит для этих объектов случайно в пространственном отношении. Как результат, эти другие принимающие объекты имеют низкую вероятность восстановления переданного PDU.
Псевдослучайное управление передачей также может использоваться, чтобы достичь пространственного кодирования с расширением спектра для управляемой моды. Для управляемой моды, передающий объект может выполнять разложение по сингулярным значениям , как изложено ниже:
 , Рав. (10)
, Рав. (10)
где  - унитарная матрица
- унитарная матрица  левых собственных векторов ;
левых собственных векторов ;
 - диагональная матрица NR×NT сингулярных значений ; и
- диагональная матрица NR×NT сингулярных значений ; и
 - унитарная матрица
- унитарная матрица  правых собственных значений
правых собственных значений 
Передающий объект может выполнять пространственную обработку для управляемой моды с пространственным кодированием с расширением спектра, как изложено ниже:
 . Рав. (11)
. Рав. (11)
Как показано в равенстве (11), сначала передающий объект выполняет пространственную обработку над с помощью для пространственного кодирования с расширением спектра, а затем выполняет пространственную обработку над результирующими кодированными с расширением спектра символами с помощью  для управляемой моды. Кодированные с расширением спектра символы (вместо символов данных) передаются по NS собственным модам канала MIMO. Эти собственные моды могут рассматриваться как ортогональные пространственные каналы, полученные разложением . Для управляемой моды с пространственным кодированием с расширением спектра эффективный канал MIMO, соблюдаемый символами данных для каждого диапазона передачи, учитывает как
для управляемой моды. Кодированные с расширением спектра символы (вместо символов данных) передаются по NS собственным модам канала MIMO. Эти собственные моды могут рассматриваться как ортогональные пространственные каналы, полученные разложением . Для управляемой моды с пространственным кодированием с расширением спектра эффективный канал MIMO, соблюдаемый символами данных для каждого диапазона передачи, учитывает как  , так и , используемые передающим объектом. Для пространственного кодирования с расширением спектра передающий объект использует разные управляющие матрицы по псевдослучайно управляемой части PDU, и только принимающий объект адресата знает эти управляющие матрицы.
, так и , используемые передающим объектом. Для пространственного кодирования с расширением спектра передающий объект использует разные управляющие матрицы по псевдослучайно управляемой части PDU, и только принимающий объект адресата знает эти управляющие матрицы.
Принятые символы в принимающем объекте для управляемой моды с пространственным кодированием с расширением спектра могут быть выражены как:

 Рав. (12)
Рав. (12)
Принимающий объект выполняет пространственную обработку для управляемой моды и пространственное декодирование, обратное кодированию с расширением спектра, как изложено ниже:

 , Рав. (13)
, Рав. (13)
где  - матрица пространственной фильтрации для управляемой моды с пространственным декодированием, обратным кодированию с расширением спектра, а
- матрица пространственной фильтрации для управляемой моды с пространственным декодированием, обратным кодированию с расширением спектра, а  - шум после детектирования. Матрица пространственного фильтра может быть выражена как:
- шум после детектирования. Матрица пространственного фильтра может быть выражена как:

Как показано в равенствах (13) и (14), принимающий объект может восстанавливать переданные символы данных, прежде всего, посредством выполнения пространственной обработки приемника с помощью  для управляемой моды, сопровождаемой пространственным декодированием, обратным кодированию с расширением спектра, с помощью .
для управляемой моды, сопровождаемой пространственным декодированием, обратным кодированию с расширением спектра, с помощью .
4. Передача MISO
В системе 100 канал MISO существует между многоантенным передающим объектом и одноантенным принимающим объектом. Для системы с единственной несущей канал MISO, сформированный NT антеннами в передающем объекте и единственной антенной в принимающем объекте, может быть охарактеризован вектором-строкой  частотной характеристики канала
частотной характеристики канала  NT, который может быть выражен как:
NT, который может быть выражен как:
где составляющая  для i=1...NT, обозначает связь между передающей антенной i и единственной приемной антенной. Другой канал MIMO существует между каждой другой комбинацией многоантенного передающего объекта и одноантенного принимающего объекта.
для i=1...NT, обозначает связь между передающей антенной i и единственной приемной антенной. Другой канал MIMO существует между каждой другой комбинацией многоантенного передающего объекта и одноантенного принимающего объекта.
Передающий объект может передавать данные со своих многочисленных антенн в одноантенный принимающий объект с использованием псевдослучайного управления передачей. Передающий объект может формировать множество L управляющих векторов, которое может быть обозначено как  , или
, или  для i=1...L, как описано выше.
для i=1...L, как описано выше.
Для передачи MISO передающий объект может выполнять пространственную обработку для псевдослучайного управления передачей, как изложено ниже:
 ,
,
где  - символ данных, который должен быть отправлен в диапазоне m передачи;
- символ данных, который должен быть отправлен в диапазоне m передачи;
 - управляющий вектор, используемый для диапазона m передачи; и
- управляющий вектор, используемый для диапазона m передачи; и
 - вектор с
- вектор с  символами передачи, которые должны быть отправлены с NT передающих антенн в диапазоне m передачи.
символами передачи, которые должны быть отправлены с NT передающих антенн в диапазоне m передачи.
Управляющий вектор  для использования для каждого диапазона передачи может быть выведен из множества L управляющих матриц. NT столбцов каждой управляющей матрицы в множестве
для использования для каждого диапазона передачи может быть выведен из множества L управляющих матриц. NT столбцов каждой управляющей матрицы в множестве  может использоваться для формирования NT разных управляющих векторов. Чтобы использовать полную мощность передачи, доступную для каждой передающей антенны, каждый столбец может масштабироваться посредством
может использоваться для формирования NT разных управляющих векторов. Чтобы использовать полную мощность передачи, доступную для каждой передающей антенны, каждый столбец может масштабироваться посредством  и использоваться в качестве управляющего вектора.
и использоваться в качестве управляющего вектора.
Принятые символы в принимающем объекте могут быть выражены как:

 ,
,
где r(m)- принятый символ для диапазона m передачи;
 - частотная характеристика эффективного канала с одним входом и одним выходом (SISO) для диапазона m передачи, которой является
- частотная характеристика эффективного канала с одним входом и одним выходом (SISO) для диапазона m передачи, которой является  ; и
; и
n(m) - шум в принимающем объекте для диапазона m передачи.
Частотная характеристика эффективного канала SISO для каждого диапазона m передачи определяется частотной характеристикой  реального канала MISO для этого диапазона передачи и управляющим вектором , используемым для диапазона передачи. Если передающий объект передает контрольные символы без псевдослучайного управления передачей, то принимающий объект может получать оценку непосредственно. Принимающий объект затем может выводить оценку для каждого диапазона передачи, используемого для передачи данных, как изложено ниже:
реального канала MISO для этого диапазона передачи и управляющим вектором , используемым для диапазона передачи. Если передающий объект передает контрольные символы без псевдослучайного управления передачей, то принимающий объект может получать оценку непосредственно. Принимающий объект затем может выводить оценку для каждого диапазона передачи, используемого для передачи данных, как изложено ниже:  . Частотная характеристика канала MISO предполагается постоянной по диапазонам передачи, используемым для передачи данных и контрольного сигнала. Вычисление для
. Частотная характеристика канала MISO предполагается постоянной по диапазонам передачи, используемым для передачи данных и контрольного сигнала. Вычисление для  может быть упрощено, если сформирован надлежащим образом, как описано выше.
может быть упрощено, если сформирован надлежащим образом, как описано выше.
Если передающий объект передает контрольные символы с псевдослучайным управлением передачей, то принимающий объект может получать оценку непосредственно. Оценка  для каждого диапазона m передачи учитывает управляющий вектор , используемый для такого диапазона передачи. Чтобы оценить , которая имеет размер 1×NT, принимающий объект может получать оценки
для каждого диапазона m передачи учитывает управляющий вектор , используемый для такого диапазона передачи. Чтобы оценить , которая имеет размер 1×NT, принимающий объект может получать оценки  для NT диапазонов передачи на основании контрольных символов, переданных передающим объектом в NT диапазонах передачи, с использованием NT управляющих векторов.
для NT диапазонов передачи на основании контрольных символов, переданных передающим объектом в NT диапазонах передачи, с использованием NT управляющих векторов.
Принимающий объект затем может выводить оценку на основании (1) NT разных оценок для NT диапазонов передачи и (2) NT управляющих векторов, используемых для этих диапазонов передачи. Принимающий объект затем может вычислять  для каждого диапазона передачи с передачей данных на основании
для каждого диапазона передачи с передачей данных на основании  , выведенной из контрольных символов и управляющего вектора , используемого для диапазона передачи.
, выведенной из контрольных символов и управляющего вектора , используемого для диапазона передачи.
Принимающий объект может выполнять детектирование (например, согласованную фильтрацию) над принятыми символами с помощью оценки частотной характеристики эффективного канала SISO, как изложено ниже:
 , Рав. (18)
, Рав. (18)
где  - детектированный символ для диапазона m передачи, который является оценкой
- детектированный символ для диапазона m передачи, который является оценкой  ,
,  - шум после детектирования, а «*» обозначает сопряженное значение.
- шум после детектирования, а «*» обозначает сопряженное значение.
Принимающий объект также может выполнять пространственную обработку приемника с помощью оценки  частотной характеристики реального канала MISO и управляющего вектора
частотной характеристики реального канала MISO и управляющего вектора  , как изложено ниже:
, как изложено ниже:
 , Рав. (19)
, Рав. (19)
где  .
.
Псевдослучайное управление передачей может использоваться для достижения разнесения передачи или пространственного кодирования с расширением спектра для передачи MISO подобным образом, как описанный выше для передачи MIMO.
5. Система
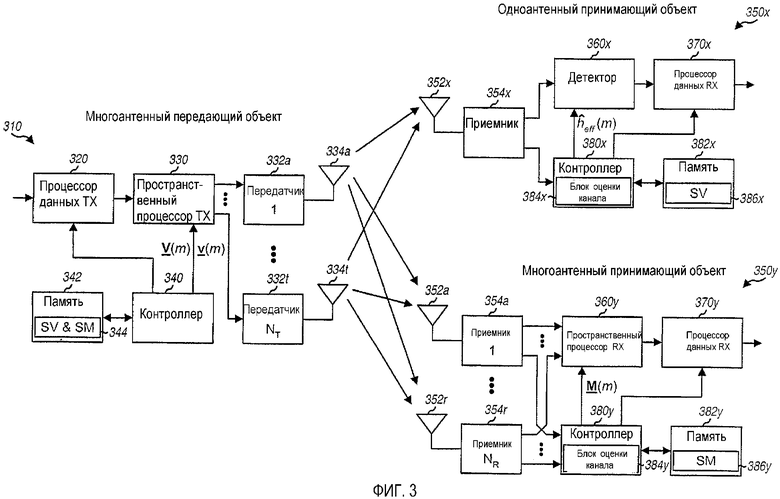
Фиг. 3 показывает структурную схему многоантенного передающего объекта 310, одноантенного принимающего объекта 350x и многоантенного принимающего объекта 350у в системе 100. Передающий объект 310 может быть точкой доступа или многоантенным пользовательским терминалом. Каждый принимающий объект 350 также может быть точкой доступа или пользовательским терминалом.
В принимающем объекте 310 процессор 320 данных передачи (TX) обрабатывает (например, кодирует, осуществляет перемежение и символьное отображение) каждый пакет данных, чтобы получить соответствующий блок символов данных. Пространственный процессор 330 TX принимает и демультиплексирует контрольные символы и символы данных так, как уместно для системы, выполняет пространственную обработку для псевдослучайного управления передачей и/или управляемой моды, поставляет NT потоков символов передачи в NT модулей с 332a по 332t передатчика (TMTR). Пространственный процессор 320 TX может выполнять пространственную обработку с помощью управляющих матриц , например, как показано в равенстве (8) или (11), для передачи MIMO в принимающий объект 350у. Пространственный процессор 320 TX также может выполнять пространственную обработку с помощью управляющих векторов , например, как показано в равенстве (16), для передачи MISO в принимающий объект 350х. Каждый модуль 332 передатчика обрабатывает свой поток символов передачи (и выполняет OFDM-модуляцию, если применима), чтобы сформировать модулированный сигнал. Модули с 332а по 332t передатчика предоставляют NT модулированных сигналов для передачи с NT антенн соответственно с 334а по 334t.
В одноантенном принимающем объекте 350х антенна 352х принимает NT переданных сигналов и предоставляет принятый сигнал в модуль приемника (RCVR) 354х. Модуль 354х приемника выполняет обработку, комплементарную выполняемой модулями 332 передатчика (например, OFDM-демодуляцию, если применима), и предоставляет (1) принятые символы данных в детектор 360х и (2) принятые контрольные символы в блок 384х оценки канала в пределах контроллера 380х. Блок 384х оценки канала оценивает фактические каналы SISO между передающим объектом 310 и принимающим объектом 350х. Детектор 360х выполняет детектирование над принятыми символами данных на основании оценок частотных характеристик эффективного канала SISO, например, как показано в равенстве (18), и предоставляет поток детектированных символов. Процессор 370х данных приема (RX) затем обрабатывает (например, осуществляет обратное символьное отображение, обратное перемежение и декодирование) поток детектированных символов и поставляет декодированные данные для каждого пакета данных.
В многоантенном принимающем объекте 350у NR антенн с 352а по 352r принимают NT переданных сигналов, и каждая антенна 352 поставляет принятый сигнал в соответствующий модуль 354 приемника. Каждый модуль 354 приемника обрабатывает соответственный принятый сигнал и поставляет (1) принятые символы данных в пространственный процессор 360у приема (RX) и (2) принятые контрольные символы в блок 384у оценки канала в пределах контроллера 380у. Блок 384y оценки канала осуществляет оценку для реальных или эффективных каналов MIMO между передающим объектом 310 и принимающим объектом 350у. Контроллер 380у выводит матрицы пространственной фильтрации на основании (1) оценок частотных характеристик каналов MIMO и управляющих матриц или (2) оценок частотных характеристик эффективных каналов MIMO. Матрицы пространственной фильтрации для технологии CCMI или MMSE могут быть выведены, как показано в таблице. Матрица пространственного фильтра для управляемой моды с пространственным кодированием с расширением спектра может быть выведена, как показано в равенстве (14). Пространственный процессор 360у RX выполняет пространственную обработку над принятыми символами данных с помощью матриц пространственной фильтрации, например, как показано в таблице или равенстве (13), и предоставляет детектированные символы. Процессор 370у данных RX затем обрабатывает детектированные символы и предоставляет декодированные данные для каждого пакета данных.
Контроллеры 340, 380х и 380у управляют работой модулей обработки в передающем объекте 310 и принимающих объектах 350х и 350у соответственно. Контроллеры 340, 380х и 380у могут формировать управляющие матрицы/производные, как описано выше. Модули 342, 382х и 382у памяти сохраняют данные и/или программный код, используемый контроллерами 340, 380х и 380у соответственно. Например, эти блоки памяти могут сохранять множество L управляющих векторов (SV) и/или множество L управляющих матриц (SM).
Технологии, описанные в материалах настоящей заявки, для формирования и использования управляющих матриц/векторов для псевдослучайного управления передачей, могут быть реализованы различными средствами. Например, эти технологии могут быть реализованы в аппаратных средствах, программном обеспечении или их сочетании. Для аппаратной реализации модули обработки, используемые для формирования управляющих матриц/векторов и/или выполнения пространственной обработки с помощью этих управляющих матриц/векторов, могут быть реализованы в пределах одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (ЦСП, DSP), устройств цифровой сигнальной обработки (DSPD), программируемых логических устройств (PLD), программируемых вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных модулей, предназначенных для выполнения функций, описанных в материалах настоящей заявки, или их комбинации.
Для программной реализации технологии, описанные в материалах настоящей заявки, могут быть реализованы модулями (например, процедурами, функциями и так далее), которые выполняют функции, описанные в материалах настоящей заявки. Коды программного обеспечения могут храниться в модуле памяти (например, модуле 342, 382х или 382у памяти по фиг. 3) и выполняться процессором (например, контроллером 340, 380х или 380у). Модуль памяти может быть реализован в пределах процессора или внешним по отношению к процессору, в каковом случае он может быть с возможностью обмена данными присоединен к процессору через различные средства, как известно в данной области техники.
Заглавия включены в материалы настоящей заявки для ссылки и для содействия в определении местоположения определенных разделов. Эти заглавия не имеют намерением ограничивать объем концепций, описанных под ними, и эти концепции могут обладать применимостью в других разделах на протяжении всего описания изобретения.
Предшествующее описание раскрытых вариантов осуществления предоставлено, чтобы дать любому специалисту в данной области техники возможность создать или использовать настоящее изобретение. Различные модификации относительно этих вариантов осуществления будут без труда очевидны специалистам в данной области техники, а общие принципы, определенные в материалах настоящей заявки, могут применяться к другим вариантам осуществления, не выходя из сущности или объема изобретения. Таким образом, настоящее изобретение не подразумевается ограниченным вариантами осуществления, показанными в материалах настоящей заявки, но должно быть согласовано с самым широким объемом, не противоречащим принципам и новейшим признакам, раскрытым в материалах настоящей заявки.
Изобретение относится к технике связи. Технический результата состоит в формировании и использовании управляющих матриц для псевдослучайного управления передачей (PRTS). Для этого передающий объект выполняет пространственную обработку с помощью управляющих матриц с тем, чтобы передача данных придерживалась совокупности «эффективных» каналов, сформированных по реальному каналу, используемому для передачи данных, и управляющим матрицам, используемым для PRTS. Управляющие матрицы могут быть сформированы посредством выбора базовой матрицы, которая может быть матрицей Уолша или матрицей Фурье. Затем выбираются разные комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы. Каждый скаляр может быть вещественным или комплексным значением. Разные управляющие матрицы формируются посредством умножения базовой матрицы на каждую из разных комбинаций скаляров. Управляющие матрицы являются разными перестановками базовой матрицы. 12 н. и 43 з.п. ф-лы, 3 ил., 1 табл.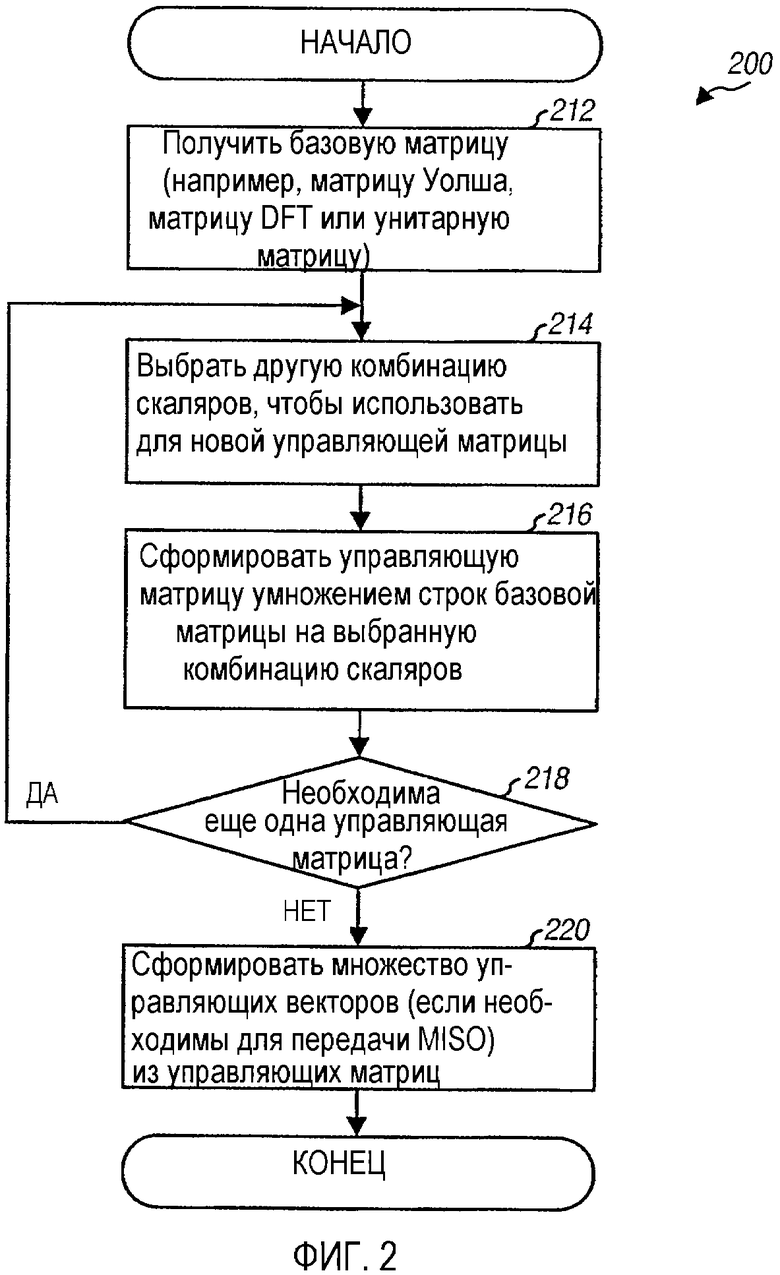
получают базовую матрицу;
выбирают, по меньшей мере, одну разную комбинацию скаляров, причем каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы, один скаляр на строку, каждый скаляр является вещественным или комплексным значением; и формируют, по меньшей мере, одну управляющую матрицу посредством перемножения базовой матрицы с, по меньшей мере, одной разной комбинацией скаляров, при этом, одна управляющая матрица формируется посредством каждой комбинации скаляров; и
применяют, по меньшей мере, одну управляющую матрицу, по меньшей мере, к одному каналу передачи данных в многоантенной беспроводной связи.
формируют множество управляющих векторов с помощью столбцов, по меньшей мере, одной управляющей матрицы.
контроллер, выполненный с возможностью
получения базовой матрицы,
выбора, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы, один скаляр на строку, каждый скаляр является вещественным или комплексным значением, и формирования по меньшей мере одной управляющей матрицы посредством перемножения базовой матрицы с, по меньшей мере, одной различной комбинацией скаляров, при этом одна управляющая матрица формируется посредством каждой комбинации скаляров; и память, выполненную с возможностью сохранения базовой матрицы, или, по меньшей мере, одной управляющей матрицы, или обеих, базовой матрицы и, по меньшей мере, одной управляющей матрицы.
средство для получения базовой матрицы;
средство для выбора, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы, один скаляр на строку, каждый скаляр является вещественным или комплексным значением; и
средство для формирования, по меньшей мере, одной управляющей матрицы посредством перемножения базовой матрицы с, по меньшей мере, одной разной комбинацией скаляров, при этом, одна управляющая матрица формируется посредством каждой комбинации скаляров.
обрабатывают данные для получения блока символов данных, которые должны передаваться в множестве диапазонов передачи;
получают множество управляющих матриц, одна управляющая матрица для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируют на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая упомянутая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения, по меньшей мере, на одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу; и
выполняют пространственную обработку над, по меньшей мере, одним символом данных, который должен быть передан в каждом диапазоне передачи, с помощью управляющей матрицы, полученной для упомянутого диапазона передачи, пространственная обработка имеет результатом блок символов данных, придерживающихся множества эффективных каналов, сформированных с помощью упомянутого множества управляющих матриц.
процессор данных, выполненный с возможностью обработки данных, чтобы получить блок символов данных, которые должны передаваться в множестве диапазонов передачи;
контроллер, выполненный с возможностью получения множества управляющих матриц по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируется на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения по меньшей мере на одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу; и
процессор, для выполнения пространственной обработки, выполненный с возможностью осуществления пространственной обработки над, по меньшей мере, одним символом данных, который должен передаваться в каждом диапазоне передачи, с помощью управляющей матрицы, полученной для упомянутого диапазона передачи, пространственная обработка имеет результатом блок символов данных, придерживающихся множества эффективных каналов, сформированных с помощью множества управляющих матриц.
средство для обработки данных, чтобы получать блок символов данных, которые должны передаваться в множестве диапазонов передачи;
средство для получения множества управляющих матриц, по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируется на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения на, по меньшей мере, одну строку базовой матрицы, чтобы формировать соответствующую управляющую матрицу; и средство для выполнения пространственной обработки над, по меньшей мере, одним символом данных, который должен передаваться в каждом диапазоне передачи, с помощью управляющей матрицы, полученной для диапазона передачи, пространственная обработка имеет результатом блок символов данных, придерживающихся множества эффективных каналов, сформированных с помощью множества управляющих матриц.
выводят множество матриц пространственной фильтрации на основании оценки частотной характеристики канала и множества управляющих матриц, по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируется на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения на, по меньшей мере, одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу;
получают в множестве диапазонов передачи, R последовательностей принятых символов через R приемных антенн, где R является целым числом, единицей или большим; и
выполняют пространственную обработку приемника над R последовательностями принятых символов с помощью множества матриц пространственной фильтрации для получения детектированных символов.
контроллер, выполненный с возможностью получения множества матриц пространственной фильтрации на основании оценки частотной характеристики канала и множества управляющих матриц, по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируется на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения на, по меньшей мере, одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу;
и
процессор для выполнения пространственной обработки, выполненный с возможностью
получения, в множестве диапазонов передачи, R последовательностей
принятых символов через R приемных антенн, где R является целым числом, единицей или большим, и
выполнения пространственной обработки приемника над R последовательностями принятых символов с помощью множества матриц пространственной фильтрации для получения детектированных символов.
средство для получения множества матриц пространственной фильтрации на основании оценки частотной характеристики канала и множества управляющих матриц, по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц сформировано на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, на одну скаляр, используемый для умножения, по меньшей мере, на одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу;
средство для получения, в множестве диапазонов передачи, R последовательностей принятых символов через R приемных антенн, где R является целым числом, единицей или большим; и
средство для выполнения пространственной обработки приемника над R последовательностями принятых символов с помощью множества матриц пространственной фильтрации для получения детектированных символов.
получают базовую матрицу;
выбирают, по меньшей мере, одну разную комбинацию скаляров, причем каждая комбинация включает в себя, по меньшей мере, один скаляр для, по меньшей мере, одной строки базовой матрицы, один скаляр на строку, каждый скаляр является вещественным или комплексным значением;
формируют, по меньшей мере, одну управляющую матрицу посредством перемножения базовой матрицы с, по меньшей мере, одной разной комбинацией скаляров, при этом одна управляющая матрица формируется посредством каждой комбинации скаляров; и
применяют, по меньшей мере, одну управляющую матрицу, по меньшей мере, к одному каналу передачи данных в многоантенной системе беспроводной связи.
обрабатывают данные для получения блока символов данных, которые должны передаваться в множестве диапазонов передачи;
получают множество управляющих матриц, одна управляющая матрица для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируют на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая упомянутая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения, по меньшей мере, на одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу; и
выполняют пространственную обработку над, по меньшей мере, одним символом данных, который должен быть передан в каждом диапазоне передачи, с помощью управляющей матрицы, полученной для упомянутого диапазона передачи, пространственная обработка имеет результатом блок символов данных, придерживающихся множества эффективных каналов, сформированных с помощью упомянутого множества управляющих матриц.
выводят множество матриц пространственной фильтрации на основании оценки частотной характеристики канала и множества управляющих матриц, по одной управляющей матрице для каждого из множества диапазонов передачи, при этом множество управляющих матриц формируется на основании базовой матрицы и, по меньшей мере, одной разной комбинации скаляров, каждая комбинация включает в себя, по меньшей мере, один скаляр, используемый для умножения на, по меньшей мере, одну строку базовой матрицы, чтобы сформировать соответствующую управляющую матрицу;
получают в множестве диапазонов передачи, R последовательностей принятых символов через R приемных антенн, где R является целым числом, единицей или большим; и
выполняют пространственную обработку приемника над R последовательностями принятых символов с помощью множества матриц пространственной фильтрации для получения детектированных символов.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА СВЯЗИ С КОЛЛЕКТИВНЫМ ДОСТУПОМ И КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (СДМА), СИСТЕМА СВЯЗИ АБОНЕНТОВ С ПОМОЩЬЮ БАЗОВОЙ СТАНЦИИ С АБОНЕНТАМИ УДАЛЕННОЙ СИСТЕМЫ, СИСТЕМА МЕСТНОЙ СВЯЗИ И СПОСОБ СОЗДАНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ СДМА В СИСТЕМЕ СВЯЗИ | 1991 |
|
RU2111619C1 |
| АНТЕННОЕ УСТРОЙСТВО ДЛЯ РАЗНЕСЕННОГО ПРИЕМА ПО МЕНЬШЕЙ МЕРЕ С ДВУМЯ АНТЕННАМИ ДЛЯ МОБИЛЬНОГО ПРИЕМА МЕТРОВЫХ И ДЕЦИМЕТРОВЫХ ВОЛН | 1992 |
|
RU2116698C1 |
| US 6198775 B1, 06.03.2001 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

