Область техники
Настоящее изобретение относится, в общем, к системам связи и, более конкретно, к методам передачи данных в системе связи со множеством антенн, которая использует мультиплексирование с ортогональным частотным разделением (OFDM).
Уровень техники
OFDM - это метод модуляции с множеством несущих, который эффективно разделяет полную ширину полосы системы на множество (NF) ортогональных поддиапазонов, которые также указываются как тональные сигналы, поднесущие, элементы дискретизации и частотные каналы. В OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может модулироваться данными. OFDM широко используется в различных системах беспроводной связи, таких как системы, которые реализуют хорошо известные стандарты IEEE 802.11a и 802.11g. Стандарты IEEE 802.11a и 802.11g, в общем, относятся к операции с одним входом и одним выходом (SISO), при этом передающее устройство применяет одну антенну для передачи данных и принимающее устройство обычно применяет одну антенну для приема данных.
Система связи с множеством антенн включает в себя устройства с одной антенной и устройства со множеством антенн. В этой системе устройство с множеством антенн может использовать свои антенны для передачи данных устройству с одной антенной. Устройство со множеством антенн и устройство с одной антенной могут реализовывать любую из ряда обычных схем разнесения передачи для получения разнесения передачи и улучшения производительности для передачи данных. Одна такая схема разнесения передачи описана С.М.Аламоути в статье, озаглавленной "A Simple Transmit Diversity Technique for Wireless Communications", IEEE Journal on Selected Areas in Communications, Vol. 16, No. 8, October 1998, pp. 1451-1458. Для схемы Аламоути передающее устройство передает каждую пару символов данных из двух антенн в двух периодах символа, и принимающее устройство комбинирует два принятых символа, полученных для двух периодов символа, для восстановления пары символов данных. Схема Аламоути, также как большинство других стандартных схем разнесения передачи, требует, чтобы принимающее устройство выполняло специальную обработку, которая может различаться для разных схем, для восстановления переданных данных и получения преимуществ разнесения передачи.
Однако устройство с одной антенной может быть спроектировано только для операции SISO, как описано ниже. Это обычно имеет место, если беспроводное устройство спроектировано согласно стандарту IEEE 802.11a или 802.11g. Такое "унаследованное" устройство с одной антенной не сможет выполнять специальную обработку, требуемую большинством обычных схем разнесения передачи. Тем не менее, все еще является весьма желательным для устройства с множеством антенн передавать данные традиционному устройству с одной антенной таким способом, что могут быть достигнуты улучшенная надежность и/или производительность.
Поэтому в данной области техники имеется необходимость в методах реализации разнесения передачи для традиционного принимающего устройства с одной антенной.
Сущность изобретения
Раскрыты методы передачи данных от передающего объекта с множеством антенн к принимающему объекту с одной антенной с использованием режима управления и/или режима псевдослучайного управления передачей (PRTS). В режиме управления передающий объект выполняет пространственную обработку для направления передачи данных к принимающему объекту. В режиме PRTS передающий объект выполняет пространственную обработку, так что передача данных осуществляется случайными действующими каналами SISO посредством поддиапазонов, и рабочие характеристики не диктуются реализацией плохого канала. Передающий объект может использовать (1) режим управления, если он знает отклик канала с множеством входов и одним выходом (MISO) для принимающего объекта, и (2) режим PRTS, даже если он не знает отклик канала MISO.
Передающий объект выполняет пространственную обработку с помощью (1) векторов управления, выведенных из оценок отклика канала MISO, для режима управления и (2) псевдослучайных векторов управления для режима PRTS. Каждый вектор управления является вектором с NT элементами, который может умножаться на символ данных для генерирования NT символов передачи для передачи из NT передающих антенн, где NT>1.
Режим PRTS может использоваться для достижения разнесения передачи без требования, чтобы принимающий объект выполнял какую-либо специальную обработку. Для разнесения передачи передающий объект использует (1) разные псевдослучайные векторы управления по поддиапазонам, используемым для передачи данных, и (2) один и тот же вектор управления по целому пакету для каждого поддиапазона. Принимающему объекту не требуется знать псевдослучайные векторы управления, используемые передающим объектом. Режим PRTS также может использоваться для реализации расширения по пространству, например, для защищенной передачи данных. Для расширения по пространству передающий объект использует (1) разные псевдослучайные векторы управления по поддиапазонам и (2) разные векторы управления по пакету для каждого поддиапазона. Для защищенной передачи данных только передающий и принимающий объекты знают векторы управления, используемые для передачи данных.
Режимы управления и PRTS также могут использоваться для передачи данных от передающего объекта с множеством антенн к принимающему объекту с множеством антенн, как описано ниже. Различные аспекты и варианты осуществления этого изобретения также описываются более детально ниже.
Краткое описание чертежей
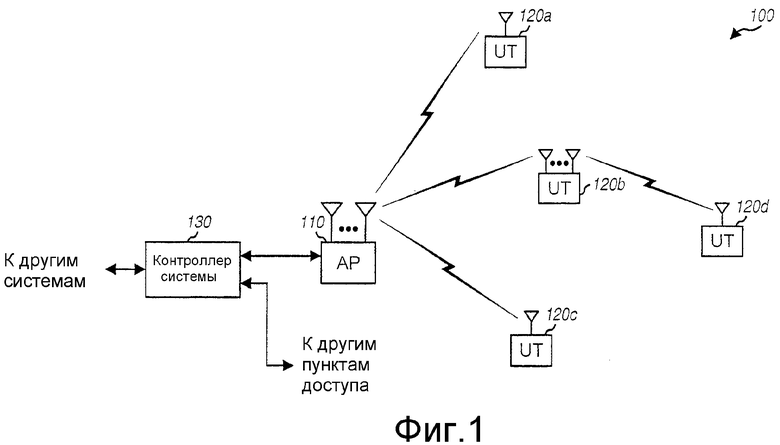
Фиг.1 показывает систему связи с множеством антенн.
Фиг.2 показывает общий формат кадра и пакета.
Фиг.3 показывает передачу пилот-сигнала от передающего объекта с двумя антеннами к принимающему объекту с одной антенной.
Фиг.4 показывает процесс для передачи данных с использованием режима управления или PRTS.
Фиг.5 показывает процесс для передачи данных с использованием обоих режимов.
Фиг.6A и 6B показывают два конкретных формата кадра и пакета.
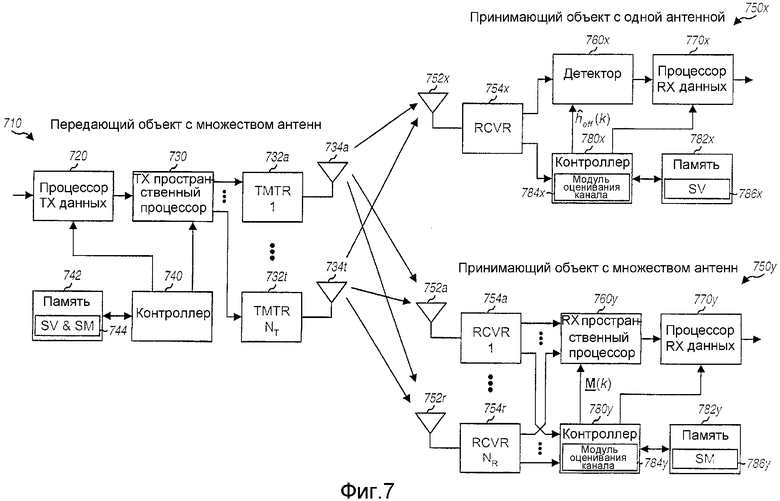
Фиг.7 показывает передающий объект и два принимающих объекта.
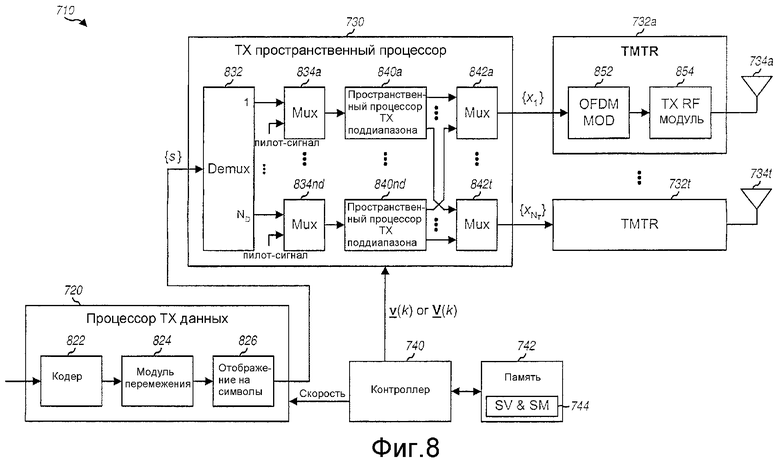
Фиг.8 показывает блок-схему передающего объекта с множеством антенн.
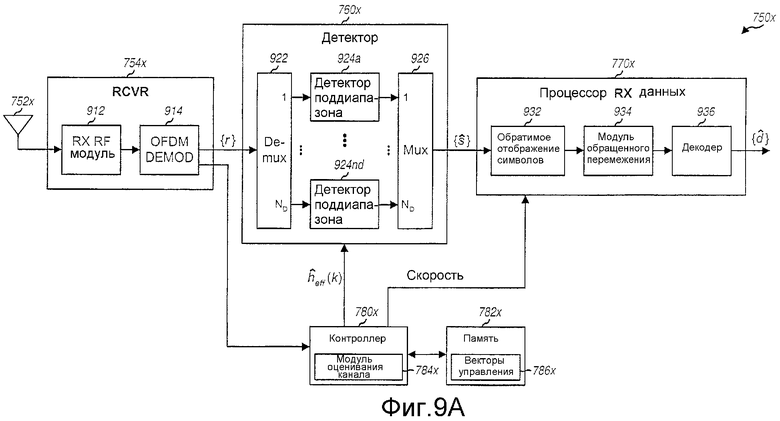
Фиг.9A показывает блок-схему принимающего объекта с одной антенной.
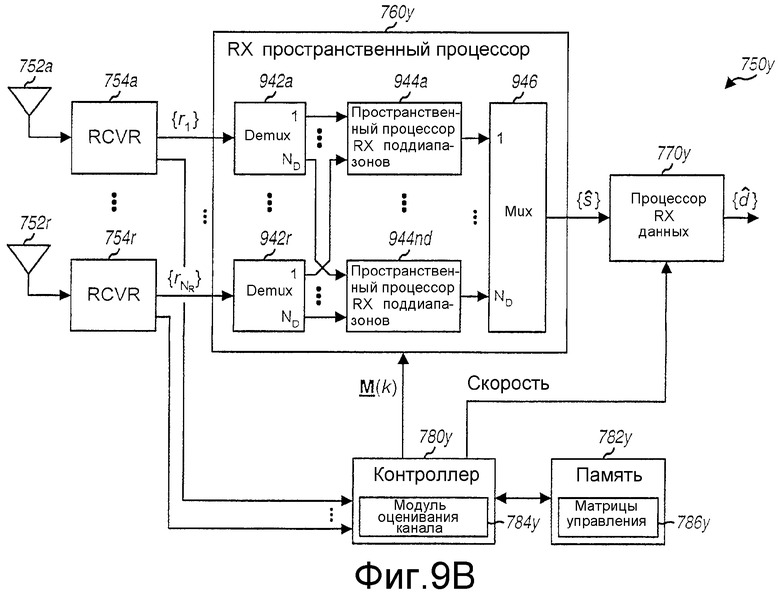
Фиг.9B показывает блок-схему принимающего объекта с множеством антенн.
Подробное описание
Слово "иллюстративный" используется здесь для обозначения "служащий в качестве примера, экземпляра или иллюстрации". Любой вариант осуществления, здесь описываемый как "иллюстративный", не должен обязательно толковаться как предпочтительный или выгодный по сравнению с другими вариантами осуществления.
Фиг.1 показывает систему 100 с множеством антенн с пунктом 110 доступа (AP) и пользовательскими терминалами (UT) 120. Пункт доступа, в общем, является стационарной станцией, которая осуществляет связь с пользовательскими терминалами и также может указываться как базовая станция, или может использоваться некоторая другая терминология. Пользовательский терминал может быть стационарным или мобильным и может также указываться как мобильная станция, беспроводное устройство, пользовательское оборудование (UE), или может использоваться некоторая другая терминология. Контроллер 130 системы связан с пунктами доступа и обеспечивает координацию и управление для этих пунктов доступа.
Пункт 110 доступа оснащен множеством антенн для передачи данных. Каждый пользовательский терминал 120 может быть оснащен одной антенной или множеством антенн для передачи данных. Пользовательский терминал может осуществлять связь с пунктом доступа, в этом случае функции пункта доступа и пользовательского терминала установлены. Пользовательский терминал также может осуществлять одноранговую связь с другим пользовательским терминалом. В последующем описании передающий объект может являться пунктом доступа или пользовательским терминалом, и принимающий объект также может являться пунктом доступа или пользовательским терминалом. Передающий объект оснащен множеством (NT) передающих антенн, и принимающий объект может быть оснащен одной антенной или множеством (NR) антенн. Передача MISO существует, когда принимающий объект оснащен одной антенной, и передача в режиме с множеством входов и множеством выходов (MIMO) существует, когда принимающий объект оснащен множеством антенн.
Система 100 может использовать структуру канала дуплексной передачи с разделением по времени (TDD) или дуплексной передачи с разделением по частоте (FDD). Для структуры TDD нисходящая линия связи и восходящая линия связи совместно используют один и тот же частотный диапазон, причем нисходящей линии связи назначается некоторая часть времени и восходящей линии связи назначается оставшаяся часть времени. Для структуры FDD нисходящей линии связи и восходящей линии связи назначаются отдельные частотные диапазоны. Для ясности, последующее описание предполагает, что система 100 использует структуру TDD.
Система 100 также использует OFDM для передачи данных, OFDM предоставляет NF полных поддиапазонов, из которых ND поддиапазонов используются для передачи данных и указываются как поддиапазоны данных, NP поддиапазонов используются для пилот-сигнала несущей и указываются как поддиапазоны пилот-сигнала, и оставшиеся NG поддиапазонов не используются и служат в качестве защитных поддиапазонов, где NF=ND+NP+NG. В каждом периоде OFDM символа, вплоть до ND символов данных, могут посылаться по ND поддиапазонам данных, и вплоть до NP символов пилот-сигнала могут посылаться по NP поддиапазонам пилот-сигнала. Используемый здесь термин "символ данных" относится к символу модуляции для данных, а "символ пилот-сигнала" относится к символу модуляции для пилот-сигнала. Символы пилот-сигнала априори известны как передающему, так и принимающему объектам.
Для OFDM модуляции NF значений частотной области (для ND символов данных, NP символов пилот-сигнала и NG нулей) преобразуются во временную область с помощью NF-точечного обратного быстрого преобразования Фурье (IFFT) для получения "преобразованного" символа, который содержит NF элементарных сигналов временной области. Чтобы противодействовать помехам между символами (ISI), которые вызываются частотно-селективным замиранием, часть каждого преобразованного символа повторяется для формирования соответствующего OFDM символа. Повторенная часть часто указывается как циклический префикс или защитный интервал. Период OFDM символа (который также указывается здесь как просто "период символа") является длительностью одного OFDM символа.
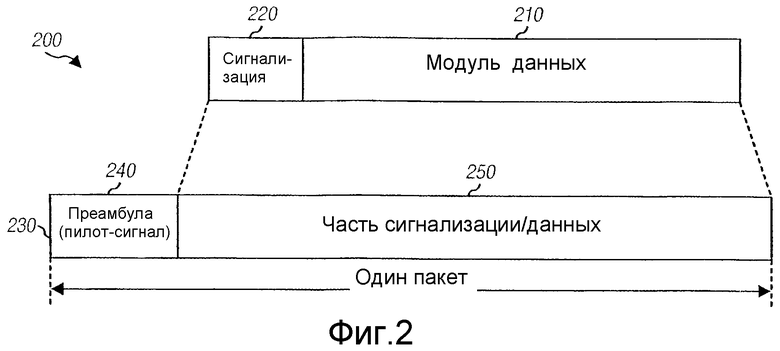
Фиг.2 показывает иллюстративную структуру 200 кадра и пакета, которая может использоваться для системы 100. Данные обрабатываются на более высоком уровне как блоки данных. Каждый блок 210 данных кодируется и модулируется (или отображается на символы) отдельно, на основе схемы кодирования и модуляции, выбранной для этого блока данных. Каждый блок 210 данных связан с частью 220 сигнализации, которая содержит различные параметры (например, скорость и длину) для этого блока данных, которые используются принимающим объектом для обработки и восстановления блока данных. Каждый блок данных и его часть сигнализации кодируются, отображаются на символы и модулируются согласно схеме OFDM для формирования части 240 сигнализации/данных пакета 230. Блок данных передается как в поддиапазонах, так и в периодах символа в части данных пакета. Пакет 230 дополнительно включает в себя преамбулу 240, которая содержит один или более типов пилот-сигнала, используемого для различных целей принимающим объектом. В общем, преамбула 240 и часть 250 сигнализации/данных могут, каждая, быть фиксированной или переменной длины и могут содержать любое количество OFDM символов.
Принимающий объект обычно обрабатывает каждый пакет отдельно. Принимающий объект использует преамбулу пакета для автоматического управления усилением (AGC), выбора разнесения (для выбора одного из различных входных портов для обработки), временной синхронизации, грубого и точного определения частоты, оценивания канала и так далее. Принимающий объект использует информацию, полученную из преамбулы, для обработки части сигнализации/данных пакета.
1. Передача MISO
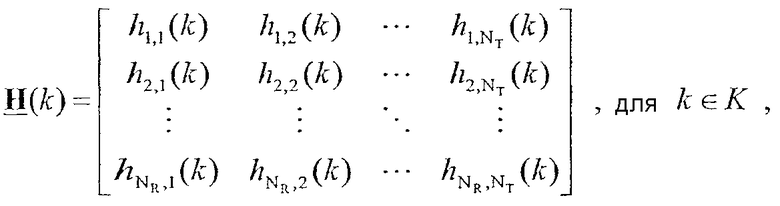
В системе 100 канал MISO существует между передающим объектом с множеством антенн и принимающим объектом с одной антенной. Для основанной на OFDM системы канал MISO, сформированный NT антеннами в передающем объекте и одной антенной в принимающем объекте, может характеризоваться с помощью набора NF векторов-строк отклика канала, каждый размерности 1×NT, который может быть выражен как:

где элемент hj(k) для j=1 ... NT обозначает связь или комплексное усиление между передающей антенной j и единственной приемной антенной для поддиапазона k и K обозначает набор NF поддиапазонов. Для простоты предполагается, что отклик h(k) канала MISO является постоянным по каждому пакету и, таким образом, является функцией только поддиапазона k.
Передающий объект может передавать данные от его множества антенн к принимающему объекту с одной антенной таким способом, чтобы обеспечить улучшенную надежность и/или производительность. Более того, передача данных может быть такой, что принимающий объект с одной антенной может выполнять нормальную обработку для операции SISO (и не должен осуществлять какую-либо другую специальную обработку для разнесения передачи) для восстановления передачи данных.
Передающий объект может передавать данные принимающему объекту с одной антенной, используя режим управления или режим PRTS. В режиме управления передающий объект выполняет пространственную обработку, чтобы направлять передачу данных к принимающему объекту. В режиме PRTS передающий объект выполняет пространственную обработку, так что передача данных осуществляется в случайных действующих каналах SISO посредством поддиапазонов. Режим PRTS может использоваться для реализации разнесения передачи без требования, чтобы принимающий объект выполнял какую-либо специальную обработку. Режим PRTS также может использоваться для реализации расширения по пространству, например, для защищенной передачи данных. Оба из этих режимов и оба из этих приложений для режима PRTS описаны ниже.
A. Режим управления для MISO
Передающий объект выполняет пространственную обработку для каждого поддиапазона для режима управления следующим образом:

где s(n,k) - символ данных, который должен передаваться в поддиапазоне k в периоде n символа;
vsm(k) - NT×1 вектор управления для поддиапазона k в периоде n символа и
xmiso,sm(n,k) - NT×1 вектор с NT символами передачи, который должен передаваться от NT передающих антенн в поддиапазоне k в периоде n символа.
В последующем описании нижний индекс "sm" обозначает режим управления, "pm" обозначает режим PRTS, "miso" обозначает передачу MISO и "mimo" обозначает передачу MIMO. В OFDM один подпоток символов данных может передаваться в каждом поддиапазоне данных. Передающий объект выполняет пространственную обработку для каждого поддиапазона данных отдельно.
Для режима управления векторы управления vsm(k) выводятся на основе вектора-строки h(k) отклика канала следующим образом:

где arg{hH(k)} обозначает аргумент hH(k) и "H" обозначает комплексное сопряженное транспонирование. Аргумент предоставляет элементы, имеющие единичную абсолютную величину и разные фазы, определяемые элементами h(k), так что полная мощность каждой передающей антенны может использоваться для передачи данных. Так как предполагается, что отклик h(k) канала является постоянным по каждому пакету, вектор vsm(k) управления также является постоянным по пакету и является функцией только поддиапазона k.
Принятые символы в принимающем объекте могут быть выражены как:

где rsm(n,k) - принятый символ для поддиапазона k в периоде n символа;
heff,sm(k) - отклик действующего канала SISO для поддиапазона k, который равен
heff,sm(k)=h(k)·vsm(k); и
z(n,k) - шум для поддиапазона k в периоде n символа.
Как показано в уравнении (4), пространственная обработка передающим объектом обеспечивает в результате подпоток символов данных для каждого поддиапазона k, соответствующего отклику heff,sm(k) действующего канала SISO, который включает в себя отклик h(k) фактического канала MISO и вектор vsm(k) управления. Принимающий объект может оценить отклик heff,sm(k) действующего канала SISO, например, на основе символов пилот-сигнала, принятых от передающего объекта. Принимающий объект может затем выполнить обнаружение (например, согласованную фильтрацию) для принятых символов rsm(n,k) с помощью оценки отклика действующего канала SISO,  eff,sm(k), для получения обнаруженных символов
eff,sm(k), для получения обнаруженных символов  (n,k), которые являются оценками переданных символов данных s(n,k).
(n,k), которые являются оценками переданных символов данных s(n,k).
Принимающий объект может выполнять согласованную фильтрацию следующим образом:ьбл

где "*" обозначает сопряжение. Операция обнаружения в уравнении (5) является такой же, как выполняемая принимающим объектом для передачи SISO. Однако для обнаружения используется оценка eff,sm(k) отклика действующего канала SISO вместо оценки отклика канала SISO.
B. Режим PRTS для разнесения передачи
Для режима PRTS передающий объект использует псевдослучайные векторы управления для пространственной обработки. Эти векторы управления выводятся для обеспечения некоторых желательных свойств, как описано ниже.
Для реализации разнесения передачи в режиме PRTS передающий объект использует один и тот же вектор управления по целому пакету для каждого поддиапазона k. Векторы управления тогда являются функцией только поддиапазона k и не периода n символа или vpm(k). В общем, желательно использовать столько разных векторов управления, сколько возможно по поддиапазонам для достижения большего разнесения передачи. Например, для каждого поддиапазона данных может использоваться разный вектор управления. Набор ND векторов управления, обозначаемый как {vpm(k)}, может использоваться для пространственной обработки для ND поддиапазонов данных. Один и тот же набор {vpm(k)} векторов управления используется для каждого пакета (по преамбуле и части сигнализации/данных для формата пакета, показанного на фиг.2). Набор векторов управления может быть одним и тем же или может изменяться от пакета к пакету.
Передающий объект выполняет пространственную обработку для каждого поддиапазона следующим образом:

Один набор векторов управления {vpm(k)} используется по всем OFDM символам в пакете.
Принятые символы в принимающем объекте могут быть выражены как:

Отклик heff,td(k) действующего канала SISO для каждого поддиапазона определяется откликом h(k) фактического канала MISO для этого поддиапазона и вектором vpm(k) управления, используемым для поддиапазона. Отклик heff,td(k) действующего канала SISO для каждого поддиапазона k является постоянным по пакету, так как предполагается, что отклик h(k) фактического канала является постоянным по пакету и один и тот же вектор vpm(k) управления используется по пакету.
Принимающий объект принимает переданный пакет и выводит оценку eff,td(k) отклика действующего канала SISO для каждого поддиапазона данных на основе преамбулы. Принимающий объект затем использует оценки eff,td(k) отклика действующего канала SISO для выполнения обнаружения для принятых символов в части сигнализации/данных пакета, как показано в уравнении (5), где eff,td(k) заменяет eff,sm(k).
Для разнесения передачи принимающему объекту не требуется знать, используется ли одна антенна или множество антенн для передачи данных, и не требуется знать вектор управления, используемый для каждого поддиапазона. Принимающий объект может, тем не менее, использовать преимущества разнесения передачи, так как по поддиапазонам используются разные векторы управления, и для этих поддиапазонов формируются разные действующие каналы SISO. Каждый пакет тогда соответствует набору псевдослучайных каналов SISO среди поддиапазонов, используемых для передачи пакета.
C. Режим PRTS для расширения по пространству
Расширение по пространству может использоваться для рандомизации передачи данных по пространственному измерению. Расширение по пространству может использоваться для защищенной передачи данных между передающим объектом и принимающим объектом получателя для предотвращения неавторизованного приема передачи данных другими принимающими объектами.
Для расширения по пространству в режиме PRTS передающий объект использует разные векторы управления по пакету для каждого поддиапазона k. Векторы управления тогда являются функцией как поддиапазона, так и периода символа, или vpm(n,k). В общем, желательно использовать столько разных векторов управления, столько возможно как по поддиапазонам, так и периодам символа для реализации более высокой степени расширения по пространству. Например, для каждого поддиапазона данных для заданного периода символа может использоваться разный вектор управления, и для каждого периода символа для заданного поддиапазона может использоваться разный вектор управления. Набор ND векторов управления, обозначаемый как {v(n,k)}, может использоваться для пространственной обработки для ND поддиапазонов данных для одного периода символа, и другой набор может использоваться для каждого периода символа по пакету. По меньшей мере, разные наборы векторов управления используются для преамбулы и части сигнализации/данных пакета, где один набор может включать в себя векторы всех наборов. Наборы векторов управления могут быть одними и теми же или могут изменяться от пакета к пакету.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

Принятые символы в принимающем объекте могут быть выражены как:

Отклик heff,ss(n,k) действующего канала SISO для каждого поддиапазона каждого периода символа определяется откликом h(k) фактического канала MISO для этого поддиапазона и вектором v(n,k) управления, используемым для поддиапазона и периода символа. Отклик heff,ss(n,k) действующего канала SISO для каждого поддиапазона k изменяется по пакету, если используются разные векторы vpm(n,k) управления по пакету.
Принимающему объекту получателя известны векторы управления, использованные передающим объектом, что позволяет ему выполнить комплементарное сжатие по пространству для восстановления переданного пакета. Принимающий объект получателя может получить эту информацию различными способами, как описано ниже. Другим принимающим объектам не известны векторы управления, и для этих объектов передача пакета выглядит случайной по пространству. Вероятность корректного восстановления пакета, таким образом, значительно уменьшается для этих принимающих объектов.
Принимающий объект получателя принимает переданный пакет и использует преамбулу для оценивания канала. Для каждого поддиапазона принимающий объект получателя может вывести оценку отклика фактического канала MISO (вместо отклика действующего канала SISO) для каждой передающей антенны, или j(k) для j=1 ... NT, на основе преамбулы. Для простоты ниже описано оценивание канала для случая с двумя передающими антеннами.
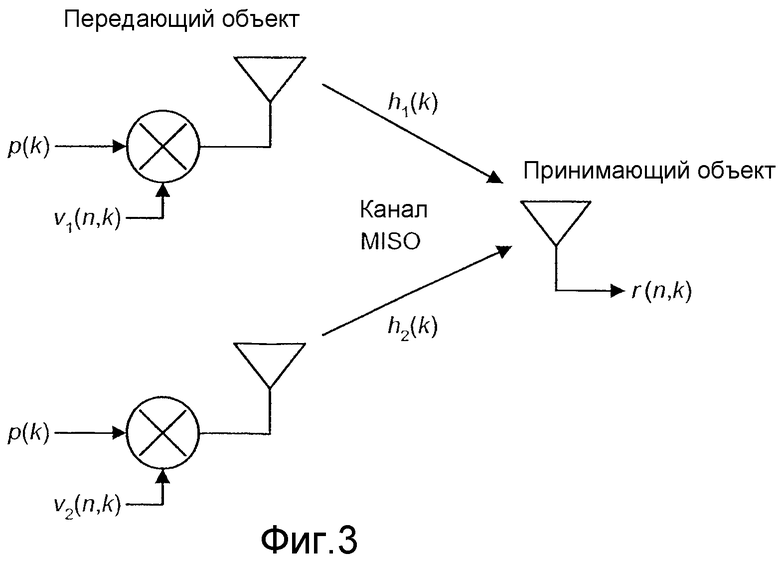
Фиг.3 показывает модель для передачи пилот-сигнала по одному поддиапазону k от передающего объекта c двумя антеннами к принимающему объекту с одной антенной. Символ p(k) пилот-сигнала пространственно обрабатывается с помощью двух элементов v1(n,k) и v2(n,k) вектора vpm(n,k) управления для получения двух символов передачи, которые затем передаются от двух передающих антенн. Двум символам передачи соответствуют отклики канала, равные h1(k) и h2(k), которые предполагаются постоянными по пакету.
Если символ p(k) пилот-сигнала передается в двух периодах символа с использованием двух наборов векторов управления, vpm(1,k) и vpm(2,k), то принятые символы пилот-сигнала в принимающем объекте могут быть выражены как:

которые могут быть выражены в матричной форме как:

где rp(k)=[rp(1,k) rp(2,k)]T - вектор с двумя принятыми символами пилот-сигнала для поддиапазона k, где "T" обозначает транспонирование;
Vp(k) - матрица с двумя векторами vpm(1,k)=[v1(1,k) v2(1,k)]T и vpm(2,k)=[v1(2,k) v2(2,k)]T управления, используемыми для поддиапазона k;
h(k)=[h1(k) h2(k)] является вектором-строкой отклика канала для поддиапазона k и
z(k)=[z(1,k) z(2,k)]T - вектор шума для поддиапазона k.
Принимающий объект может вывести оценку отклика канала MISO,  (k) следующим образом:
(k) следующим образом:

Принимающий объект получателя может вычислить V (k), так как ему известны все элементы Vp(k). Другим принимающим объектам не известно Vp(k), они не могут вычислить V(k) и не могут вывести достаточно точную оценку для h(k).
(k), так как ему известны все элементы Vp(k). Другим принимающим объектам не известно Vp(k), они не могут вычислить V(k) и не могут вывести достаточно точную оценку для h(k).
Описание выше предназначено для простого случая с двумя передающими антеннами. В общем, количество передающих антенн определяет количество OFDM символов для пилот-сигнала (длину передачи пилот-сигнала) и размер Vp(k). В частности, символы пилот-сигнала передаются для минимум NT периодов символа, и матрица Vp(k) обычно имеет размер NT×NT.
Принимающий объект получателя может после этого вывести оценку отклика действующего канала SISO, eff,ss(n,k), для каждого последующего OFDM символа в пакете следующим образом:

Вектор vpm(n,k) управления может изменяться от периода символа к периоду символа для каждого поддиапазона. Однако принимающему объекту получателя известен вектор управления, используемый для каждого поддиапазона и каждого периода символа. Принимающий объект использует оценку отклика действующего канала SISO, eff,ss(n,k), для каждого поддиапазона каждого периода символа для выполнения обнаружения для принятого символа для этого поддиапазона и периода символа, например, как показано в уравнении (5), где eff,ss(n,k) заменяет eff,sm(k) и изменяется по пакету.
Передающий объект также может передавать пилот-сигнал "в открытом виде" без какой-либо пространственной обработки, но умножая символы пилот-сигнала для каждой передающей антенны на разную ортогональную последовательность (например, последовательность Уолша) длины NT или целого кратного NT. В этом случае принимающий объект может оценить MISO отклик h(k) канала непосредственно умножением принятых символов пилот-сигнала на каждую ортогональную последовательность, используемую для передачи пилот-сигнала, и интегрированием по длине последовательности, как известно в данной области техники. Альтернативно, передающий объект может передавать пилот-сигнал, используя один вектор vpm(1,k) управления, и принимающий объект может оценить отклик действующего канала MISO как  Передающий объект может, после этого, передавать данные, используя другой вектор управления vpm(2,k), и принимающий объект может затем оценить отклик действующего канала MISO для данных как
Передающий объект может, после этого, передавать данные, используя другой вектор управления vpm(2,k), и принимающий объект может затем оценить отклик действующего канала MISO для данных как  Передача пилот-сигнала и оценивание канала могут, таким образом, выполняться различными способами для расширения по пространству.
Передача пилот-сигнала и оценивание канала могут, таким образом, выполняться различными способами для расширения по пространству.
Передающий объект может выполнять расширение по пространству как над преамбулой, так и частью сигнализации/данных пакета. Передающий объект также может выполнять расширение по пространству только над преамбулой или только частью сигнализации/данных. В любом случае, расширение по пространству является таким, что оценка канала, полученная на основе преамбулы, не является точной или действительной для части сигнализации/данных. Эффективность может быть повышена за счет выполнения расширения по пространству над, по меньшей мере, частью сигнализации/данных пакета, так что эта часть выглядит случайной по пространству для других принимающих объектов, которым не известны векторы управления.
Для расширения по пространству принимающему объекту получателя известно, что для передачи данных используется множество антенн, и дополнительно известен вектор управления, используемый для каждого поддиапазона в каждом периоде символа. Сжатие по пространству, по существу, реализуется с использованием надлежащих векторов управления для вывода оценок отклика действующего канала SISO, которые затем используются для обнаружения данных. Принимающий объект получателя также использует преимущества разнесения передачи, так как по пакету используются разные векторы управления. Другим принимающим объектам не известны векторы управления, используемые передающим объектом. Таким образом, их оценки отклика канала MISO не являются действительными для части сигнализации/данных и при использовании для обнаружения данных обеспечивают ухудшенные или искаженные обнаруженные символы. Следовательно, на вероятность восстановления переданного пакета может оказываться существенное влияние для этих других принимающих объектов. Так как принимающий объект должен выполнять специальную обработку для оценивания канала и обнаружения для расширения по пространству, то традиционные принимающие объекты, которые спроектированы только для операции SISO, не могут восстановить передачу данных с расширением по пространству.
Расширение по пространству также может выполняться для режима управления и режима PRTS посредством поворота фазы каждого символа данных псевдослучайным способом, который известен как передающему, так и принимающему объектам.
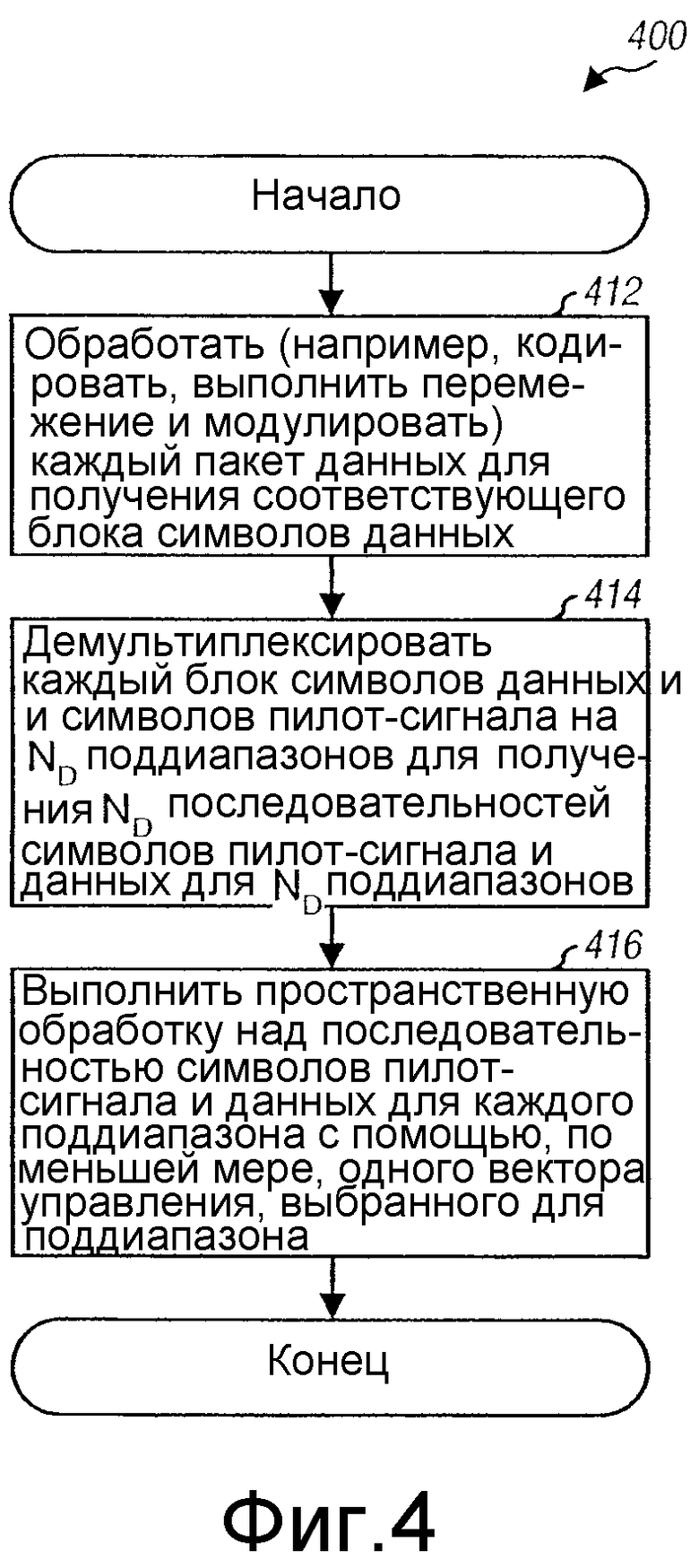
Фиг.4 показывает диаграмму последовательности операций процесса 400 для передачи данных от передающего объекта к принимающему объекту с использованием режима управления или PRTS. Каждый пакет данных обрабатывается (например, кодируется, перемежается и отображается на символы) для получения соответствующего блока символов данных (этап 412). Блок символов данных и символов пилот-сигнала демультиплексируются на ND поддиапазонов данных для получения ND последовательностей символов пилот-сигнала и данных для ND поддиапазонов данных (этап 414). Затем выполняется пространственная обработка над последовательностью символов пилот-сигнала и данных для каждого поддиапазона данных с помощью, по меньшей мере, одного вектора управления, выбранного для поддиапазона (этап 416).
Для режима управления для каждого поддиапазона данных используется один вектор управления, и пространственная обработка с этим вектором управления управляет передачей к принимающему объекту. Для разнесения передачи в режиме PRTS один псевдослучайный вектор управления используется для каждого поддиапазона данных, и принимающему объекту не требуется знать вектор управления. Для расширения по пространству в режиме PRTS, по меньшей мере, один псевдослучайный вектор управления используется для каждого поддиапазона данных, причем разное управление применяется к преамбуле и части сигнализации/данных, и только передающий и принимающий объекты имеют информацию о векторе (векторах) управления. Для режима PRTS пространственная обработка с помощью псевдослучайных векторов управления рандомизирует ND действующих каналов SISO, соответствующих ND последовательностям символов пилот-сигнала и данных, посылаемых по ND поддиапазонам.
Принимающий объект может не иметь возможности должным образом обработать передачу данных, отправленную с использованием режима PRTS. Это может иметь место, например, если принимающий объект использует некоторую форму интерполяции по поддиапазонам для оценивания канала. В этом случае передающий объект может передавать, используя "открытый" режим без какой-либо пространственной обработки.
D. Многорежимное функционирование
Передающий объект также может передавать данные принимающему объекту, используя режимы как управления, так и PRTS. Передающий объект может использовать режим PRTS, когда отклик канала не известен, и переключаться на режим управления, как только отклик канала становится известным. Для системы TDD можно предполагать, что отклики нисходящей линии связи и восходящей линии связи являются взаимными один для другого. То есть, если h(k) представляет вектор-строку отклика канала от передающего объекта к принимающему объекту, то взаимный канал означает, что отклик канала от принимающего объекта к передающему объекту определяется как hT(k). Передающий объект может оценить отклик канала для одной линии связи (например, нисходящей линии связи), базируясь на передаче пилот-сигнала, посланной принимающим объектом по другой линии связи (например, восходящей линии связи).
Фиг.5 показывает диаграмму процесса 500 для передачи данных от передающего объекта к принимающему объекту, использующего режимы как управления, так и PRTS. Сначала передающий объект передает данные принимающему объекту, используя режим PRTS, так как он не имеет оценок отклика канала для принимающего объекта (этап 512). Передающий объект выводит оценки отклика канала для линии связи между передающим и принимающим объектами (этап 514). Например, передающий объект может (1) оценить отклик канала для первой линии связи (например, восходящей линии связи), базируясь на пилот-сигнале, посланном принимающим объектом, и (2) вывести оценки отклика канала для второй линии связи (например, нисходящей линии связи) на основе (например, как взаимный) оценок отклика канала для первой линии связи. Передающий объект, после этого, передает данные принимающему объекту, используя режим управления, с векторами управления, выведенными из оценок отклика канала для второй линии связи, как только оценки отклика канала для принимающего объекта становятся доступными (этап 516).
Передающий объект может осуществлять переходы между режимами управления и PRTS в зависимости от того, доступны ли или нет оценки отклика канала. Принимающий объект выполняет один и тот же процесс для оценивания канала и обнаружения для обоих режимов, и ему не требуется знать, какой режим используется передающим объектом для любого заданного пакета. Лучшая производительность может обычно достигаться при использовании режима управления, и передающий объект может использовать более высокую скорость для режима управления. В любом случае, передающий объект может сигнализировать скорость, используемую для каждого пакета, в части сигнализации пакета. Принимающий объект затем будет обрабатывать каждый пакет на основе оценок канала, полученных для этого пакета, и в соответствии с указанной скоростью.
2. Передача MIMO
В системе 100 канал MIMO существует между передающим объектом с множеством антенн и принимающим объектом с множеством антенн. Для системы OFDM канал MIMO, сформированный NT антеннами в передающем объекте и NR антеннами в принимающем объекте, может характеризоваться набором NF матриц отклика канала, каждая размера NR×NT, которые могут быть выражены как:
где элемент hi,j(k) для i=1 ... NR и j=1 ... NT обозначает связь между передающей антенной j и приемной антенной i для поддиапазона k. Для простоты предполагается, что отклик H(k) канала MIMO является постоянным по каждому пакету.
Матрица H(k) отклика канала для каждого поддиапазона может быть разложена на NS пространственных каналов, где NS≤min{NT,NR}. NS пространственных каналов могут использоваться для передачи данных таким способом, чтобы обеспечить большую надежность и/или более высокую полную пропускную способность. Например, NS символов данных могут передаваться одновременно от NT передающих антенн в каждом периоде символа для достижения более высокой пропускной способности. Альтернативно, единичный символ данных может передаваться от NT передающих антенн в каждом периоде символа для достижения большей надежности. Для простоты в последующем описании предполагается, что NS=NT≤NR.
Передающий объект может передавать данные принимающему объекту, используя режим управления или PRTS. В режиме управления для MIMO передающий объект выполняет пространственную обработку для передачи символов данных на "собственных модах" канала MIMO, как описано ниже. В режиме PRTS передающий объект выполняет пространственную обработку, так что символам данных соответствуют случайные действующие каналы MIMO. Режимы управления и PRTS используют разные матрицы управления и требуют разную пространственную обработку принимающим объектом. Режим PRTS также может использоваться для разнесения передачи и расширения по пространству.
A. Режим управления для MIMO
Для режима управления для MIMO передающий объект выводит матрицы Vsm(k) управления посредством выполнения разложения по сингулярным значениям матрицы H(k) отклика канала для каждого поддиапазона следующим образом:

где U(k) - NR×NR унитарная матрица левых собственных векторов H(k);
Σ(k) - NR×NT диагональная матрица сингулярных значений H(k) и
Vsm(k) - NT×NT унитарная матрица правых собственных векторов H(k).
Унитарная матрица M характеризуется свойством MHM=I, где I - это единичная матрица. Столбцы унитарной матрицы ортогональны друг другу. Так как отклик H(k) канала предполагается постоянным по пакету, матрицы Vsm(k) управления также являются постоянными по пакету и являются функцией только поддиапазона k.
Передающий объект выполняет пространственную обработку для каждого поддиапазона следующим образом:

где s(n,k) - NT×1 вектор с NT символами данных, которые должны посылаться в поддиапазоне k в периоде n символа и
xmimo,sm(n,k) - NT×1 вектор с NT символами передачи, которые должны посылаться от NT передающих антенн в поддиапазоне k в периоде n символа.
Пространственная обработка с помощью матриц Vsm(k) управления дает результат в виде NT символов данных в s(n,k), которые передаются на NT собственных модах канала MIMO, которые могут рассматриваться как ортогональные пространственные каналы.
Принятые символы в принимающем объекте могут быть выражены как:

где rsm(n,k) - NR×1 вектор с NR принятыми символами для поддиапазона k в периоде n символа и
z(n,k) - вектор шума для поддиапазона k в периоде n символа.
Для простоты предполагается, что шум является аддитивным белым гауссовским шумом (AWGN) с нулевым вектором среднего и ковариационной матрицей Λ=σ2·I, где σ2 - дисперсия шума, наблюдаемого принимающим объектом.
Принимающий объект выполняет пространственную обработку для режима управления следующим образом:

где  sm(n,k) - вектор с NT обнаруженными символами для режима управления, который является оценкой s(n,k), и z'(n,k) - вектор шума для последующего обнаружения.
sm(n,k) - вектор с NT обнаруженными символами для режима управления, который является оценкой s(n,k), и z'(n,k) - вектор шума для последующего обнаружения.
B. Режим управления с расширение по пространству
Расширение по пространству также может выполняться в комбинации с режимом управления. В этом случае передающий объект сначала выполняет пространственную обработку над вектором s(n,k) символов данных для расширения по пространству и затем выполняет пространственную обработку над результирующими символами расширения для режима управления. Для расширения по пространству передающий объект использует разные матрицы управления по пакету для каждого поддиапазона k. Желательно использовать столько разных матриц управления, сколько возможно как по поддиапазонам, так и периодам символа для достижения более высокой степени расширения по пространству. Например, для каждого периода символа по пакету может использоваться разный набор матриц {Vpm(n,k)} управления. По меньшей мере, один набор матриц управления используется для преамбулы, и другой набор матриц управления используется для оставшейся части пакета, где один набор матриц управления может включать в себя единичные матрицы.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

где Vpm(n,k) - NT×NT псевдослучайная матрица управления для поддиапазона k в периоде n символа. Как показано в уравнении (18), передающий объект сначала выполняет расширение по пространству с помощью псевдослучайной матрицы {Vpm(n,k)} управления, за которым следует пространственная обработка для режима управления с помощью матрицы {Vsm(k)} управления, выведенной из матрицы H(k) отклика канала MIMO. Символы расширения (вместо символов данных), таким образом, передаются на собственных модах канала MIMO.
Принятые символы в принимающем объекте может быть выражены как:

Принимающий объект выполняет пространственную обработку для режима управления и сжатие по пространству следующим образом:

Как показано в уравнении (20), принимающий объект может восстанавливать переданные символы данных посредством сначала выполнения пространственной обработки приемника для режима управления, за которым следует сжатие по пространству с помощью псевдослучайной матрицы {Vpm(n,k)} управления. Для режима управления с расширением по пространству действующий канал MIMO, соответствующий символам данных для каждого поддиапазона, включает в себя обе матрицы Vsm(k) и Vpm(n,k), используемые передающим объектом.
C. Режим PRTS для разнесения передачи
Для режима PRTS для MIMO передающий объект использует псевдослучайные матрицы управления для пространственной обработки. Эти матрицы управления выводятся для обеспечения некоторых желательных свойств, как описано ниже.
Для достижения разнесения передачи в режиме PRTS передающий объект использует разные матрицы управления по поддиапазонам, но одну и ту же матрицу управления по целому пакету для каждого поддиапазона k. Желательно использовать столько разных матриц управления, сколько возможно по поддиапазонам для достижения большего разнесения передачи.
Передающий объект выполняет пространственную обработку для каждого поддиапазона следующим образом:

где Vpm(k) - NT×NT матрица управления для поддиапазона k в периоде n символа и
xmimo,td(n,k) - NT×1 вектор с NT символами передачи, который должен посылаться от NT передающих антенн в поддиапазоне k в периоде n символа.
Один набор матриц {Vpm(k)} управления используется по всем OFDM символам в пакете.
Принятые символы в принимающем объекте могут быть выражены как:

где rtd(n,k) - вектор принятых символов для режима PRTS и
Heff,td(k) - NT×NT матрица отклика действующего канала MIMO для поддиапазона k в периоде n символа, которая равна Heff,td(k)=H(k)·Vpm(k).
Пространственная обработка с помощью псевдослучайной матрицы Vpm(k) управления дает результат в виде символов данных в s(n,k), соответствующем отклику Heff,td(k) действующего канала MIMO, который включает в себя отклик H(k) действующего канала и матрицу Vpm(k) управления. Принимающий объект может оценить отклик Heff,td(k) действующего канала MIMO, например, на основе символов пилот-сигнала, принятых от передающего объекта. Принимающий объект может затем выполнить пространственную обработку над принятыми символами в rtd(n,k) с помощью оценки отклика действующего канала MIMO,  , для получения обнаруженных символов
, для получения обнаруженных символов  . Оценка отклика действующего канала MIMO,
. Оценка отклика действующего канала MIMO,  eff,td(k), для каждого поддиапазона k является постоянной по пакету, так как (1) отклик H(k) фактического канала MIMO предполагается постоянным по пакету, и (2) используется одна и та же матрица Vpm(k) управления по пакету.
eff,td(k), для каждого поддиапазона k является постоянной по пакету, так как (1) отклик H(k) фактического канала MIMO предполагается постоянным по пакету, и (2) используется одна и та же матрица Vpm(k) управления по пакету.
Принимающий объект может вывести обнаруженные символы, используя различные методы обработки в приемнике, включающие в себя (1) метод обращения корреляционной матрицы канала (CCMI), который также определяется как метод обращения в нуль незначащих коэффициентов, и (2) метод минимальной среднеквадратической ошибки (MMSE). Таблица 1 содержит краткое описание пространственной обработки в принимающем объекте для методов CCMI и MMSE. В таблице 1 Mccmi,td(k) является матрицей пространственного фильтра для метода CCMI, Mmmse,td(k) является матрицей пространственного фильтра для метода MMSE и Dmmse,td(k) является диагональной матрицей для метода MMSE (которая содержит диагональные элементы Mmmse,td(k)eff,td(k)).




Как показано в таблице 1, для разнесения передачи матрицы Mccmi,td(k) и Mmmse,td(k) пространственного фильтра для каждого поддиапазона k являются постоянными по пакету, так как оценка отклика действующего канала MIMO, eff,td(k), является постоянной по пакету. Для разнесения передачи принимающему объекту не требуется знать матрицу управления, используемую для каждого поддиапазона. Принимающий объект может, тем не менее, использовать преимущества разнесения передачи, так как по поддиапазонам используются разные матрицы управления, и для этих поддиапазонов формируются разные действующие каналы MIMO.
D. Режим PRTS для расширения по пространству
Для расширения по пространству в режиме PRTS передающий объект использует разные матрицы управления по пакету для каждого поддиапазона k. Псевдослучайные матрицы управления для расширения по пространству могут выбираться, как описано выше для режима управления.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

Принятые символы в принимающем объекте могут быть выражены как:

Отклик Heff,ss(n,k) действующего канала MIMO для каждого поддиапазона каждого периода символа определяется откликом H(k) фактического канала для поддиапазона и матрицей Vpm(n,k) управления, используемой для этого поддиапазона и периода символа. Отклик Heff,ss(n,k) действующего канала MIMO для каждого поддиапазона k изменяется по пакету, так как по пакету используются разные матрицы Vpm(n,k) управления.
Принимающий объект получателя принимает переданный пакет и использует преамбулу для оценивания канала. Для каждого поддиапазона принимающий объект получателя может вывести оценку отклика H(k) фактического канала MIMO (вместо отклика действующего канала MIMO) на основе преамбулы. Принимающий объект получателя может, после этого, вывести оценку матрицы отклика действующего канала MIMO, eff,ss(n,k), для каждого поддиапазона каждого периода символа следующим образом:

Матрица Vpm(n,k) управления может изменяться от периода символа к периоду символа для каждого поддиапазона. Принимающий объект использует оценку отклика действующего канала MIMO, eff,ss(n,k), для каждого поддиапазона каждого периода символа для выполнения пространственной обработки над принятыми символами для этого поддиапазона и периода символа, например, используя метод CCMI или MMSE. Например, матрица eff,ss(n,k) может использоваться для вывода матрицы пространственного фильтра для метода CCMI или MMSE, как показано в таблице 1, где eff,ss(n,k) заменяет  Однако, так как матрица
Однако, так как матрица  изменяется по пакету, матрица пространственного фильтра также изменяется по пакету.
изменяется по пакету, матрица пространственного фильтра также изменяется по пакету.
Для расширения по пространству в принимающем объекте получателя известна матрица управления, используемая передающим объектом для каждого поддиапазона в каждом периоде символа, и он может выполнять комплементарное сжатие по пространству для восстановления переданного пакета. Сжатие по пространству реализуется с использованием надлежащих матриц управления для вывода оценок отклика действующего канала MIMO, которые затем используются для пространственной обработки. Другим принимающим объектам не известна матрица управления, и для этих объектов передача пакетов выглядит пространственно случайной. Как результат, эти другие принимающие объекты имеют низкую вероятность восстановления переданного пакета.
E. Многорежимное функционирование
Передающий объект также может передавать данные принимающему объекту, используя режимы как PRTS, так и управления. Передающий объект может использовать режим PRTS, когда отклик канала не доступен, и переключаться на режим управления, как только отклик канала становится доступным.
3. Генерирование векторов и матриц управления
Векторы управления и матрицы, используемые для режима PRTS, могут генерироваться различными способами. Некоторые иллюстративные схемы для генерирования этих векторов/матриц управления описаны ниже. Векторы/матрицы управления могут предварительно вычисляться и сохраняться в передающем и принимающем объектах и после этого извлекаться для использования по мере необходимости. Альтернативно, эти векторы/матрицы управления могут вычисляться в реальном времени по мере необходимости. В последующем описании набор L векторов или матриц управления генерируется и выбирается для использования для режима PRTS.
A. Генерирование векторов управления
Векторы управления, используемые для режима PRTS, должны иметь следующие свойства для достижения хорошей производительности. Строгое соблюдение этих свойств не является необходимым. Первое, каждый вектор управления должен иметь единичную энергию, чтобы мощность передачи, используемая для символов данных, не изменялась за счет псевдослучайного управления передачей. Второе, NT элементов каждого вектора управления могут определяться так, чтобы иметь равную абсолютную величину, чтобы могла использоваться полная мощность передачи каждой антенны. Третье, разные векторы управления должны быть достаточно некоррелированными, чтобы корреляция между любыми двумя векторами управления в наборе была нулевым или малым значением. Это условие может быть выражено как:

где c(ij) - корреляция между векторами vpm(i) и vpm(j) управления.
Набор L векторов {vpm(i)} управления может генерироваться с использованием различных схем. В первой схеме L векторов управления генерируются на основе NT×NT матриц G независимых одинаково распределенных (IID) комплексных гауссовских случайных величин, причем каждая имеет нулевое среднее и единичную дисперсию. Корреляционная матрица каждой матрицы G вычисляется как R=GH·G и разлагается как R=E·D·EH для получения унитарной матрицы E. Каждый столбец E может использоваться как вектор vpm(i) управления, если он удовлетворяет критерию низкой корреляции с каждым из векторов управления, уже находящимся в наборе.
Во второй схеме L векторов управления генерируются последовательным вращением начального унитарного вектора vpm(i) управления следующим образом:

В третьей схеме L векторов управления генерируются так, что элементы этих векторов имеют одинаковую абсолютную величину, но разные фазы. Для заданного вектора vpm(i)=[v1(i) v2(i) ...  (i)] управления, который может генерироваться любым способом, нормализованный вектор
(i)] управления, который может генерироваться любым способом, нормализованный вектор  (i) управления может быть сформирован как:
(i) управления может быть сформирован как:

где A - константа (например, A=1/ ), и
), и 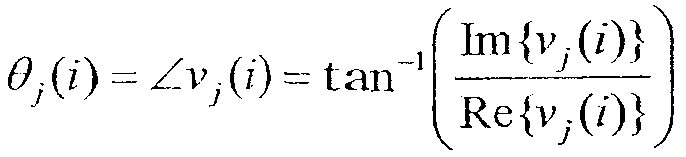
является фазой j-го элемента vpm(i). Нормализованный вектор  (i) управления позволяет использовать для передачи полную мощность передачи, доступную для каждой антенны.
(i) управления позволяет использовать для передачи полную мощность передачи, доступную для каждой антенны.
Для генерирования набора L векторов управления могут использоваться и другие схемы, что входит в объем изобретения.
B. Генерирование матриц управления
Матрицы управления, используемые для режима PRTS, должны иметь следующие свойства для достижения высокой производительности. Строгое соблюдение этих свойств не является необходимым. Первое, матрицы управления должны быть унитарными матрицами и удовлетворять следующему условию:

Уравнение (29) показывает, что каждый столбец Vpm(i) должен иметь единичную энергию, и эрмитово внутреннее произведение любых двух столбцов Vpm(i) должно быть нулем. Это условие обеспечивает, что NT символов данных, переданных одновременно с использованием матрицы Vpm(i) управления, имеют одинаковую мощность и являются ортогональными друг к другу до передачи. Второе, корреляция между любыми двумя матрицами управления в наборе должна быть нулевым или малым значением. Это условие может быть выражено как:

где C(ij) - корреляционная матрица для Vpm(i) и Vpm(j) и 0 - это матрица из всех нулей. L матриц управления могут генерироваться так, что максимальная энергия корреляционных матриц для всех возможных пар матриц управления минимизируется.
Набор L матриц управления {Vpm(i)} может генерироваться с использованием различных схем. В первой схеме L матриц управления генерируются на основе матриц случайных величин. Сначала генерируется матрица G случайных величин, и корреляционная матрица для G вычисляется и разлагается для получения унитарной матрицы E, как описано выше. Если существует низкая корреляция между E и каждой из уже сгенерированных матриц управления, то E может использоваться как матрица Vpm(i) управления и добавляться к набору. Процесс повторяется до получения всех L матриц управления.
Во второй схеме L матриц управления генерируются последовательным вращением начальной унитарной матрицы V(1) в NT-мерном комплексном пространстве следующим образом:

где Θi - NT×NT диагональная унитарная матрица с элементами, которые являются L-ми корнями из единицы. Вторая схема описана Б.М.Хочвальдом и др. (B.M.Hochwald et al.) в "Systematic Design of Unitary Space-Time Constellations", IEEE Transaction on Information Theory, Vol. 46, No. 6, September 2000.
Для генерирования набора L матриц управления могут использоваться и другие схемы, что входит в объем изобретения. В общем, матрицы управления могут генерироваться псевдослучайным или детерминированным способом.
C. Выбор векторов/матриц управления
L векторов/матриц управления в наборе могут выбираться для использования различными способами. Вектор управления может рассматриваться как вырожденная матрица управления, содержащая только один столбец. Таким образом, матрица может содержать один или множество столбцов.
В одном варианте осуществления матрицы управления выбираются из набора L матриц управления детерминированным способом. Например, L матриц управления могут проходиться в цикле и выбираться в последовательном порядке, начиная с V(1), затем V(2) и так далее, и затем V(L). В другом варианте осуществления матрицы управления выбираются из набора псевдослучайным способом. Например, матрица управления для использования для каждого поддиапазона k может выбираться на основе функции f(k), которая псевдослучайным образом выбирает одну из L матриц управления, или V(f(k)). В другом варианте осуществления матрицы управления выбираются из набора способом "перестановки". Например, L матриц управления могут проходиться в цикле и выбираться для использования в последовательном порядке. Однако начальная матрица управления для каждого цикла может выбираться псевдослучайным способом, вместо того, чтобы первой всегда была матрица V(1) управления. L матриц управления также могут выбираться другими способами.
Выбор матрицы управления также может зависеть от количества матриц (L) управления в наборе и количества поддиапазонов (NM) для применения псевдослучайного управления передачей, например, NM=ND+NP. В общем, L может быть больше, равно или меньше, чем NM. Если L=NM, то для каждого из NM поддиапазонов может выбираться разная матрица управления. Если L<NM, то матрицы управления повторно используются для каждого периода символа. Если L>NM, то используется некоторое подмножество матриц управления для каждого периода символа. Для всех случаев NM матриц управления для NM поддиапазонов могут выбираться детерминированным, псевдослучайным способом или способом перестановки, как описано выше.
Для разнесения передачи NM матриц управления выбираются для NM поддиапазонов для каждого пакета. Для расширения по пространству NM матриц управления могут выбираться для NM поддиапазонов для каждого периода символа пакета. Для каждого периода символа может выбираться разный набор NM матриц управления, где набор может включать в себя разную перестановку L матриц управления.
Для расширения по пространству как для MISO, так и MIMO только передающему и принимающему объектам известны псевдослучайные матрицы управления, используемые для пространственной обработки. Это может достигаться различными способами. В одном варианте осуществления матрицы управления выбираются псевдослучайным образом из набора L матриц управления на основе некоторого алгоритма, могут дополняться защищенной информацией (например, ключом, начальным числом (seed), идентификатором или серийным номером), обмениваемой между передающим и принимающим объектами (например, посредством защищенной передачи сигналов по эфиру или посредством некоторых других средств). В результате получается набор матриц управления, которые переставлены способом, известным только передающему и принимающему объектам. В другом варианте осуществления передающий и принимающий объекты модифицируют общие матрицы управления, известные всем объектам, используя уникальную матрицу Uu, которая известна только этим двум объектам. Эта операция может быть выражена как: Vpm,u(i)=Uu·Vpm(i) или vpm,u(i)=Uu·vpm(i). Модифицированные матрицы управления затем используются для пространственной обработки. В другом варианте осуществления передающий и принимающий объекты переставляют столбцы общих матриц управления способом, известным только этим двум объектам. В другом варианте осуществления передающий и принимающий объекты генерируют матрицы управления по мере необходимости на основе некоторой защищенной информации, известной только этим двум объектам. Псевдослучайные матрицы управления, используемые для расширения по пространству, могут генерироваться и/или выбираться различными другими способами, которые также входят в объем изобретения.
4. IEEE 802.11
Описанные методы могут использоваться для различных систем OFDM, например для систем, которые реализуют IEEE 802.11a и 802.11g. Структура OFDM для 802.11a/g разбивает полную полосу пропускания системы на 64 ортогональных поддиапазона (или NF=64), которым назначаются индексы от -32 до +31. Из этих 64 поддиапазонов 48 поддиапазонов (с индексами ±{1, ..., 6, 8, ..., 20, 22, ..., 26}) используются для передачи данных, четыре поддиапазона (с индексами ±{7, 21}) используются для передачи пилот-сигнала, и поддиапазон DC (с индексом 0) и оставшиеся поддиапазоны не используются и служат в качестве защитных поддиапазонов. Для IEEE 802.11a/g каждый OFDM символ компонуется из преобразованного символа из 64-элементарных сигналов и циклического префикса из 16-элементарных сигналов. IEEE 802.11a/g использует полосу 20 МГц пропускания системы. Таким образом, каждый элементарный сигнал имеет продолжительность 50 нс, и каждый OFDM символ имеет продолжительность 4,0 мс, которая является одним периодом OFDM символа для этой системы. Эта OFDM структура описана в документе для стандарта IEEE 802.11a, озаглавленном "Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High-speed Physical Layer in the 5 GHz Band", September 1999, который является общедоступным.
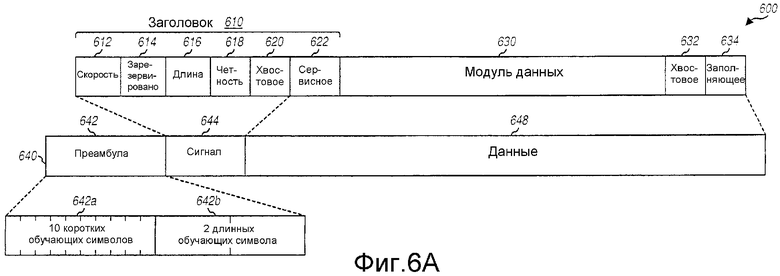
Фиг.6A показывает формат 600 кадра и пакета, определенный стандартом IEEE 802.11. Формат 600 может использоваться для поддержки как режима управления, так и режима PRTS (как для разнесения передачи, так и расширения по пространству) для передачи MISO. В физическом (PHY) слое в стеке протокола для IEEE 802.11 данные обрабатываются как служебные блоки данных подслоя PHY (PSDU). Каждый PSDU 630 кодируется и модулируется отдельно на основе схемы кодирования и модуляции, выбранной для этого PSDU. Каждый PSDU 63O дополнительно имеет PLCP заголовок 610, который включает в себя шесть полей. Поле 612 скорости показывает скорость для PSDU. Зарезервированное поле 614 включает в себя один зарезервированный бит. Поле 616 длины показывает длину PSDU в единицах октетов. Поле 618 проверки четности содержит 1-битный контроль на четность для трех предшествующих полей. Хвостовое поле 620 содержит шесть нулей, используемых для выравнивания кодера. Сервисное поле 622 включает в себя семь нулевых битов, используемых для инициализации скремблера для PSDU, и девять зарезервированных битов. Хвостовое поле 632 добавляется в конец PSDU 630 и содержит шесть нулей, используемых для выравнивания кодировщика. Заполняющее поле 634 переменной длины содержит достаточное количество заполняющих битов, чтобы сделать PSDU соответствующим целому числу OFDM символов.
Каждый PSDU 630 и его ассоциированные поля передаются в одном модуле данных протокола PHY (PPDU) 640, который включает в себя три раздела. Раздел 642 преамбулы имеет продолжительность из четырех периодов OFDM символа и содержит десять коротких тренирующих символов 642a и два длинных обучающих символа 642b, которые используются принимающим объектом для АРУ, захвата синхронизации грубого и точного определения частоты, оценивания канала и других целей. Десять коротких обучающих символов генерируются с 12 специальными символами пилот-сигнала в 12 назначенных поддиапазонах и охватывают два периода OFDM символа. Два длинных обучающих символа генерируются с 52 специальными символами пилот-сигнала в 52 назначенных поддиапазонах и также охватывают два периода OFDM символа. Раздел 644 сигнала содержит один OFDM символ для первых пяти полей заголовка. Раздел 648 данных содержит переменное количество OFDM символов для сервисного поля заголовка, PSDU и последующие хвостовое и заполняющее поля. PPDU 640 также указывается как пакет.
Фиг.6B показывает иллюстративный формат 602 кадра и пакета, который может использоваться для поддержки режимов как управления, так и PRTS как для передачи MISO, так и MIMO. PPDU 650 для этого формата включает в себя раздел 652 преамбулы, раздел 654 сигнала, раздел 656 MIMO пилот-сигнала и раздел 658 данных. Раздел 652 преамбулы содержит десять коротких обучающих символов 652a и два длинных обучающих символа 652b, аналогично разделу 642 преамбулы. Раздел 654 сигнала содержит сигнализацию для PPDU 650 и может определяться, как показано в таблице 2.
Таблица 2 показывает иллюстративный формат для раздела 654 сигнала для четырех передающих антенн (NT=4). Вплоть до четырех пространственных каналов могут быть доступными для передачи данных, в зависимости от количества приемных антенн. Скорость для каждого пространственного канала указывается полем вектора скорости. Принимающий объект может определить и послать назад максимальные скорости, поддерживаемые пространственными каналами. Передающий объект может затем выбрать скорости для передачи данных на основе этих максимальных скоростей, например, меньшие или равные им. Другие форматы с другими полями также могут использоваться для раздела 654 сигнала.
Раздел 656 MIMO пилот-сигнала содержит MIMO пилот-сигнал, используемый принимающим объектом, для оценивания канала MIMO. MIMO пилот-сигнал является пилот-сигналом, передаваемым из всех NT передающих антенн (1) "в открытом виде" без какой-либо пространственной обработки, (2) с псевдослучайным управлением, как показано в уравнении (21) или (23), или (3) на собственных модах канала MIMO, как показано в уравнении (18). Символы передачи для каждой передающей антенны для MIMO пилот-сигнала дополнительно умножаются на ортогональную последовательность (или накрываются этой последовательностью) из NT-элементарных сигналов (например, код Уолша из 4-элементарных сигналов), назначенную этой передающей антенне. Раздел 658 данных содержит переменное количество OFDM символов для данных, заполняющих битов и хвостовых битов, аналогично разделу 648 данных.
Для режима PRTS с форматами 600 и 602 псевдослучайное управление передачей применяется по поддиапазонам и по всем разделам модулей PPDU 640 и 650. Для разнесения передачи один и тот же псевдослучайный вектор/матрица управления используется по всему PPDU для каждого поддиапазона. Для расширения по пространству могут использоваться разные векторы/матрицы по PPDU для каждого поддиапазона. По меньшей мере, разные векторы/матрицы управления используются для раздела преамбулы/пилот-сигнала, используемого для оценивания канала, и раздела данных модуля PPDU. Например, разные векторы управления могут использоваться для разделов преамбулы и данных модуля PPDU 640, причем вектор управления для одного раздела может состоять из всех единиц. Для разделов MIMO пилот-сигнала и данных модуля PPDU 650 могут использоваться разные матрицы управления, причем матрица управления для одного раздела может являться единичной матрицей.
Принимающий объект обычно обрабатывает каждый пакет (или PPDU) отдельно. Принимающий объект может использовать (1) короткие обучающие символы для АРУ, выбора разнесения, захвата синхронизации и грубого определения частоты и (2) длинные обучающие символы для точного определения частоты. Принимающий объект может использовать длинные обучающие символы для оценивания канала MISO и MIMO пилот-сигнала для оценивания канала MIMO. Принимающий объект может выводить оценки отклика эффективного канала прямо или косвенно из преамбулы или MIMO пилот-сигнала и использовать оценки канала для обнаружения или пространственной обработки, как описано выше.
5. Система
Фиг.7 показывает блок-схему передающего объекта 710 с множеством антенн, принимающего объекта 750x с одной антенной и принимающего объекта 750y с множеством антенн в системе 100. Передающий объект 710 может быть пунктом доступа или пользовательским терминалом с множеством антенн. Каждый принимающий объект 750 также может быть пунктом доступа или пользовательским терминалом.
В передающем объекте 710 процессор 720 передаваемых (TX) данных обрабатывает (например, кодирует, перемежает и отображает на символы) каждый пакет данных для получения соответствующего блока символов данных. TX пространственный процессор 730 принимает и демультиплексирует символы пилот-сигнала и данных на надлежащие поддиапазоны, выполняет пространственную обработку для режима управления и/или PRTS и выдает NT потоков символов передачи в NT модулей 732a-732t передатчиков (TMTR). Каждый модуль 732 передатчика обрабатывает свой поток символов передачи для генерирования модулированного сигнала. Модули 732a-732t передатчиков выдают NT модулированных сигналов для передачи из NT антенн 734a-734t соответственно.
В принимающем объекте 750x с одной антенной антенна 752x принимает NT переданных сигналов и выдает принятый сигнал в модуль (RCVR) 754x приемника. Модуль 754x приемника выполняет обработку, комплементарную обработке, выполняемой модулями 732 передатчиков, и выдает (1) принятые символы данных в детектор 760x и (2) принятые символы пилот-сигнала в модуль 784x оценивания канала контроллера 780x. Модуль 784x оценивания канала выводит оценки отклика канала для действующих каналов SISO между передающим объектом 710 и принимающим объектом 750x для всех поддиапазонов данных. Детектор 760x выполняет обнаружение для принятых символов данных для каждого поддиапазона на основе оценки отклика действующего канала SISO для этого поддиапазона и выдает поток обнаруженных символов для всех поддиапазонов. Процессор 770x принимаемых (RX) данных затем обрабатывает поток обнаруженных символов (например, осуществляет обращенное отображение символов, обращенное перемежение и декодирование) и выдает декодированные данные для каждого пакета данных.
В принимающем объекте 750y с множеством антенн NR антенн 752a-752r принимают NT переданных сигналов, и каждая антенна 752 выдает принятый сигнал в соответствующий модуль 754 приемника. Каждый модуль 754 приемника обрабатывает соответствующий принятый сигнал и выдает (1) принятые символы данных (RX) в пространственный процессор 760y принимаемых данных и (2) принятые символы пилот-сигнала в модуль 784y оценивания канала в контроллере 780y. Модуль 784y оценивания канала выводит оценки отклика канала для фактического или действующего каналов MIMO между передающим объектом 710 и принимающим объектом 750y для всех поддиапазонов данных. Контроллер 780y выводит матрицы пространственного фильтра на основе оценок отклика канала MIMO и матриц управления и в соответствии с, например, методом CCMI или MMSE. RX пространственный процессор 760y выполняет пространственную обработку над принятыми символами данных для каждого поддиапазона с помощью матрицы пространственного фильтра, выведенной для этого поддиапазона, и выдает обнаруженные символы для поддиапазона. Процессор 770y RX данных затем обрабатывает обнаруженные символы для всех поддиапазонов и выдает декодированные данные для каждого пакета данных.
Контроллеры 740, 780x и 780y управляют работой обрабатывающих устройств в передающем объекте 710 и принимающих объектах 750x и 750y соответственно. Запоминающие устройства 742, 782x и 782y хранят данные и/или программный код, используемые контроллерами 740, 780x и 780y соответственно. Например, эти запоминающие устройства могут хранить набор L псевдослучайных векторов управления (SV) и/или матриц управления (SM).
Фиг.8 показывает вариант осуществления обрабатывающих устройств в передающем объекте 710. В процессоре 720 TX данных кодер 822 принимает и кодирует каждый пакет данных отдельно, на основе схемы кодирования и выдает биты кода. Кодирование увеличивает надежность передачи данных. Схема кодирования может включать в себя циклический избыточностный контроль (CRC), сверточное, турбо, с проверкой четности низкой плотности (LDPC), блочное и другое кодирование или комбинацию перечисленного. В режиме PRTS SNR может изменяться по пакету данных, даже если беспроводной канал является равномерным по всем поддиапазонам и статическим по пакету. Достаточно мощная схема кодирования может использоваться для противодействия изменению SNR по пакету, так что эффективность кодирования пропорциональна среднему SNR по пакету. Модуль 824 перемежения перемежает или переупорядочивает биты кода для каждого пакета на основе схемы перемежения для достижения разнесения по частоте, времени и/или пространственного разнесения. Модуль 826 отображения на символы отображает перемеженные биты для каждого пакета на основе схемы модуляции (например, QPSK, M-PSK или M-QAM) и выдает блок символов данных для пакета. Схемы кодирования и модуляции, используемые для каждого пакета, определяются скоростью, выбранной для пакета.
В TX пространственном процессоре 730 демультиплексор (Demux) 832 принимает и демультиплексирует блок символов данных для каждого пакета на ND последовательностей символов данных для ND поддиапазонов данных. Для каждого поддиапазона данных мультиплексор (Mux) 834 принимает символы пилот-сигнала и данных для поддиапазона, выдает символы пилот-сигнала в течение частей преамбулы и MIMO пилот-сигнала и выдает символы данных в течение частей сигнализации и данных. Для каждого пакета ND мультиплексоров 834a-834nd выдают ND последовательностей символов пилот-сигнала и данных для ND поддиапазонов данных в ND пространственных процессоров 840a-840nd TX поддиапазонов. Каждый пространственный процессор 840 выполняет пространственную обработку для режима управления или PRTS для соответствующего поддиапазона данных. Для передачи MISO каждый пространственный процессор 840 выполняет пространственную обработку над своей последовательностью символов пилот-сигнала и данных с помощью одного или более векторов управления, выбранных для поддиапазона, и выдает NT последовательностей символов передачи для NT передающих антенн в NT мультиплексоров 842-842t. Для передачи MIMO каждый пространственный процессор 840 демультиплексирует свою последовательность символов пилот-сигнала и данных на NS подпоследовательностей для NS пространственных каналов, выполняет пространственную обработку над NS подпоследовательностями символов пилот-сигнала и данных с помощью одной или более матриц управления, выбранных для поддиапазона, и выдает NT последовательностей символов передачи в NT мультиплексоров 842a-842t. Каждый мультиплексор 842 выдает последовательность символов передачи для всех поддиапазонов в соответствующий модуль 732 передатчика. Каждый модуль 732 передатчика включает в себя (1) OFDM модулятор (MOD) 852, который выполняет OFDM модуляцию над соответствующим потоком символов передачи, и (2) TX RF модуль 854, который обрабатывает (например, преобразует в аналоговую форму, фильтрует, усиливает и преобразует с повышением частоты) поток OFDM символов из OFDM модулятора 852 для генерирования модулированного сигнала.
Фиг.9A показывает вариант осуществления обрабатывающих устройств в принимающем объекте 750x с одной антенной. Модуль 754x приемника включает в себя (1) RX RF модуль 912, который обрабатывает и оцифровывает принятый сигнал из антенны 752x и выдает выборки, и (2) OFDM демодулятор (DEMOD) 914, который выполняет OFDM демодуляцию над выборками, выдает принятые символы данных в детектор 760x и выдает принятые символы пилот-сигнала в модуль 784x оценивания канала. Модуль 784x оценивания канала выводит оценки отклика канала для действующих каналов SISO на основе принятых символов пилот-сигнала и, возможно, векторов управления.
В детекторе 760x демультиплексор 922 демультиплексирует принятые символы данных для каждого пакета на ND последовательностей принятых символов данных для ND поддиапазонов данных и выдает ND последовательностей в ND детекторов 924a-924nd поддиапазонов. Каждый детектор 924 поддиапазона выполняет обнаружение над принятыми символами данных для своего поддиапазона с помощью оценки отклика действующего канала SISO для этого поддиапазона и выдает обнаруженные символы. Мультиплексор 926 мультиплексирует обнаруженные символы для всех поддиапазонов данных и выдает блок обнаруженных символов для каждого пакета в процессор 770x RX данных. В процессоре 770x RX данных модуль 932 обратного преобразования символов осуществляет обратное преобразование обнаруженных символов для каждого пакета в соответствии со схемой модуляции, используемой для этого пакета. Модуль обращенного перемежения 934 устраняет перемежение демодулированных данных способом, комплементарным перемежению, выполненному над пакетом. Декодер 936 декодирует данные с устраненным перемежением способом, комплементарным кодированию, выполненному над пакетом. Например, для декодера 936 могут использоваться турбо декодер или декодер Витерби, если передающим объектом 710 выполняется турбо или сверточное кодирование соответственно.
Фиг.9B показывает вариант осуществления обрабатывающих устройств в принимающем объекте 750y с множеством антенн. Модули 754a-754r приемника обрабатывают, оцифровывают и демодулируют согласно схеме OFDM NR принятых сигналов, выдают принятые символы данных в RX пространственный процессор 760y и выдают принятые символы пилот-сигнала в модуль 784y оценивания канала. Модуль 784y оценивания канала выводит оценки отклика канала для каналов MIMO на основе принятых символов пилот-сигнала. Контроллер 780y выводит матрицы пространственного фильтра на основе оценок отклика канала MIMO и матриц управления. В RX пространственном процессоре 760y NR демультиплексоров 942a-942r получают принятые символы данных от NR модулей 754a-754r приемника. Каждый демультиплексор 942 демультиплексирует принятые символы данных для каждого пакета на ND последовательностей принятых символов данных для ND поддиапазонов данных и выдает ND последовательностей в ND пространственных процессоров 944a-944nd RX поддиапазонов. Каждый пространственный процессор 944 выполняет пространственную обработку приемника над принятыми символами данных для своего поддиапазона с помощью матрицы пространственного фильтра для этого поддиапазона и выдает обнаруженные символы. Мультиплексор 946 мультиплексирует обнаруженные символы для всех поддиапазонов и выдает блок обнаруженных символов для каждого пакета в процессор 770y RX данных, который может быть выполнен аналогично процессору 770x RX данных на фиг.9A.
Описанные методы передачи данных могут быть реализованы различными средствами. Например, эти методы могут быть реализованы аппаратными средствами, программным обеспечением или комбинацией перечисленного. Для аппаратного варианта осуществления обрабатывающие устройства, используемые для выполнения или поддержки методов передачи данных в передающих и принимающих объектах, могут быть реализованы на одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессорах (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных модулях, спроектированных для выполнения описанных функций, или с использованием комбинаций перечисленных средств.
Для программного варианта осуществления метода передачи данных могут быть реализованы с помощью модулей (например, процедур, функций и так далее), которые выполняют описанные функции. Программный код может храниться в запоминающем устройстве (например, запоминающих устройствах 742, 782x и 782y на фиг.7) и исполняться процессором (например, контроллерами 740, 780x и 780y на фиг.7). Запоминающее устройство может быть реализовано в процессоре или вне процессора, в этом случае оно может связываться с процессором для передачи данных с помощью различных средств, как известно в данной области техники.
Заглавия включены в описание для ссылки и облегчения нахождения конкретных разделов. Эти заглавия не предназначены для ограничения объема понятий, описанных ниже, и эти понятия могут иметь применимость в других разделах описания.
Предыдущее описание раскрытых вариантов осуществления предназначено для обеспечения возможности любому специалисту в данной области техники реализовать или использовать настоящее изобретение. Различные модификации этих вариантов осуществления должны быть очевидны специалистам в данной области техники, и определенные здесь общие принципы могут применяться в других вариантах осуществления без отхода от сущности или объема изобретения. Таким образом, настоящее изобретение не ограничивается показанными вариантами осуществления и должно соответствовать самому широкому объему, совместимому с раскрытыми принципами и новыми признаками.

Изобретение относится к области связи. Передающий объект с множеством антенн передает данные к принимающему объекту с одной или множеством антенн, используя (1) режим управления для направления передачи данных к принимающему объекту или (2) режим псевдослучайного управления передачей (PRTS) для рандомизации действующих каналов, соответствующих передаче данных по поддиапазонам. Режим PRTS может использоваться для достижения разнесения передачи или расширения по пространству. Для разнесения передачи передающий объект использует разные псевдослучайные векторы управления по поддиапазонам, но один и тот же вектор управления по всему пакету для каждого поддиапазона. Для расширения по пространству передающий объект использует разные псевдослучайные векторы управления по поддиапазонам и разные векторы управления по пакету для каждого поддиапазона. Технический результат заключается в улучшении надежности передачи данных. 13 н. и 49 з.п. ф-лы, 11 ил., 2 табл.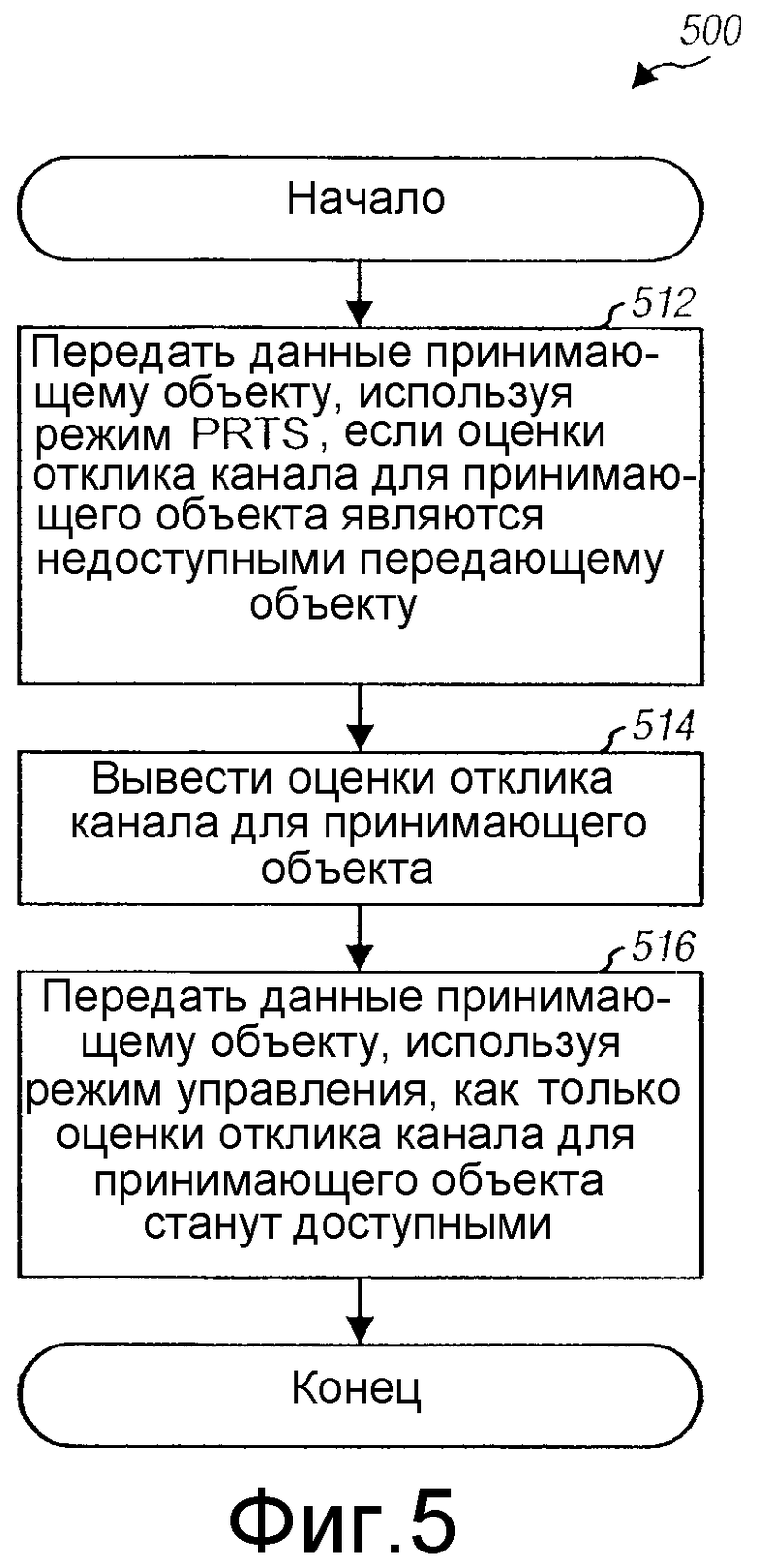
обработку пакета данных для получения блока символов данных;
демультиплексирование символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для пакета данных, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
выполнение пространственной обработки над последовательностью символов пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одного вектора управления, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), наблюдаемых, по меньшей мере, одним из множества последовательностей символов пилот-сигнала и данных, посылаемых по множеству поддиапазонов.
кодирование пакета данных в соответствии со схемой кодирования для получения кодированных данных,
перемежение кодированных данных для получения перемеженных данных и
отображение перемеженных данных на символы в соответствии со схемой модуляции для получения блока символов данных.
выбор упомянутого, по меньшей мере, одного вектора управления для каждого поддиапазона из набора L векторов управления, где L - целое число, большее, чем единица.
выбор вектора управления для каждого поддиапазона в каждом периоде символа из набора L векторов управления, где L - целое число, большее, чем единица.
процессор данных, предназначенный для обработки пакета данных для получения блока символов данных;
демультиплексор, предназначенный для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для пакета данных, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
пространственный процессор, предназначенный для выполнения пространственной обработки над последовательностью символов пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одного вектора управления, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), наблюдаемых множеством последовательностей символов пилот-сигнала и данных, посылаемых по множеству поддиапазонов.
средство для обработки пакета данных для получения блока символов данных;
средство для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для пакета данных, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
средство для выполнения пространственной обработки над последовательностью символов пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одного вектора управления, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), наблюдаемых множеством последовательностей символов пилот-сигнала и данных, посылаемых по множеству поддиапазонов.
обработку пакета данных для получения блока символов данных;
демультиплексирование символов пилот-сигнала и блока символов данных на множество поддиапазонов; и
выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одной матрицы управления, выбранной для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов MIMO для множества поддиапазонов, наблюдаемых, по меньшей мере, одними из символов пилот-сигнала и данных, посылаемых по множеству поддиапазонов.
умножение символов расширения для каждого поддиапазона, полученных от пространственной обработки, с помощью упомянутой, по меньшей мере, одной матрицы управления, для передачи символов расширения на собственных модах канала MIMO для поддиапазона.
выбор упомянутой, по меньшей мере, одной матрицы управления для каждого поддиапазона из набора L матриц управления, где L - целое число, большее, чем единица.
выбор матрицы управления для каждого поддиапазона в каждом периоде символа из набора L матриц управления, где L - целое число, большее, чем единица.
процессор данных, предназначенный для обработки пакета данных для получения блока символов данных;
демультиплексор, предназначенный для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов; и пространственный процессор, предназначенный для выполнения пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одной матрицы управления, выбранной для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов MIMO для множества поддиапазонов, наблюдаемых символами пилот-сигнала и данных, посылаемыми по множеству поддиапазонов.
передачу данных принимающему объекту с использованием первого режима, если оценки отклика канала для принимающего объекта являются недоступными передающему объекту, причем символы данных пространственно обрабатываются с помощью псевдослучайных векторов или матриц управления в первом режиме; и
передачу данных к принимающему объекту, с использованием второго режима, если оценки отклика канала для принимающего объекта являются доступными передающему объекту, причем символы данных пространственно обрабатываются с помощью векторов или матриц управления, выведенных из оценок отклика канала во втором режиме.
обработку первого пакета данных для получения первого блока символов данных,
демультиплексирование символов пилот-сигнала и первого блока символов данных на множество поддиапазонов и
выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одного псевдослучайного вектора управления, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), соответствующих символам пилот-сигнала и данных, посылаемым по множеству поддиапазонов.
обработку второго пакета данных для получения второго блока символов данных,
демультиплексирование символов пилот-сигнала и второго блока символов данных на множество поддиапазонов и
выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью вектора управления, выведенного из оценки отклика канала, для канала с множеством входов и одним выходом (MISO) для поддиапазона, для управления передачей символов пилот-сигнала и данных к принимающему объекту.
обработку первого пакета данных для получения первого блока символов данных;
демультиплексирование символов пилот-сигнала и первого блока символов данных на множество поддиапазонов; и выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью, по меньшей мере, одной псевдослучайной матрицы управления, выбранной для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с множеством входов и множеством выходов (MIMO) для множества поддиапазонов, наблюдаемых символами пилот-сигнала и данных, посылаемыми по множеству поддиапазонов.
обработку второго пакета данных для получения второго блока символов данных,
демультиплексирование символов пилот-сигнала и второго блока символов данных на множество поддиапазонов и
выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с помощью матрицы управления, выведенной из оценки отклика канала для канала MIMO для поддиапазона, для передачи символов пилот-сигнала и данных на собственных модах канала MIMO для поддиапазона.
контроллер, предназначенный для выбора первого режима для передачи данных к принимающему объекту, если оценки отклика канала для принимающего объекта являются недоступными, и выбора второго режима для передачи данных к принимающему объекту, если оценки отклика канала являются доступными, причем символы данных пространственно обрабатываются с помощью псевдослучайных векторов управления в первом режиме и с помощью векторов управления, выведенных из оценок отклика канала, во втором режиме; и
пространственный процессор, предназначенный для выполнения пространственной обработки для каждого блока символов данных в соответствии с режимом, выбранным для блока.
получение, через одну приемную антенну, S последовательностей принятых символов для S последовательностей символов пилот-сигнала и данных, переданных посредством S поддиапазонов передающим объектом, где S - целое число, большее, чем единица, причем S последовательностей символов пилот-сигнала и данных пространственно обрабатываются с помощью множества векторов управления в передающем объекте для рандомизации S действующих каналов с одним входом и одним выходом (SISO), наблюдаемых S последовательностями символов пилот-сигнала и данных;
вывод оценок отклика канала для S действующих каналов SISO на основе принятых символов пилот-сигнала в S последовательностях принятых символов; и
выполнение обнаружения над принятыми символами данных в S последовательностях принятых символов, на основе оценок отклика канала для S действующих каналов SISO, для получения обнаруженных символов.
демодулятор, предназначенный для обеспечения S последовательностей принятых символов, полученных через одну приемную антенну, для S последовательностей символов пилот-сигнала и данных, переданных посредством S поддиапазонов передающим объектом, где S - целое число, большее, чем единица, причем S последовательностей символов пилот-сигнала и данных пространственно обрабатываются с помощью множества векторов управления в передающем объекте для рандомизации S действующих каналов с одним входом и одним выходом (SISO), наблюдаемых S последовательностями символов пилот-сигнала и данных;
модуль оценивания канала, предназначенный для получения оценки отклика канала для S действующих каналов SISO на основе принятых символов пилот-сигнала в S последовательностях принятых символов; и детектор, предназначенный для выполнения обнаружения над принятыми символами данных в S последовательностях принятых символов на основе оценок отклика канала для S действующих каналов SISO для получения обнаруженных символов.
средство для получения, через одну приемную антенну, S последовательностей принятых символов для S последовательностей символов пилот-сигнала и данных, переданных посредством S поддиапазонов передающим объектом, где S - целое число, большее, чем единица, причем S последовательностей символов пилот-сигнала и данных пространственно обрабатываются с помощью множества векторов управления в передающем объекте для рандомизации S действующих каналов с одним входом и одним выходом (SISO), наблюдаемых S последовательностями символов пилот-сигнала и данных;
средство для вывода оценок отклика канала для S действующих каналов SISO на основе принятых символов пилот-сигнала в S последовательностях принятых символов; и
средство для выполнения обнаружения над принятыми символами данных в S последовательностях принятых символов на основе оценок отклика канала для S действующих каналов SISO, для получения обнаруженных символов.
получение, через R приемных антенн в принимающем объекте, S наборов R последовательностей принятых символов для S наборов Т последовательностей символов пилот-сигнала и данных, переданных посредством S поддиапазонов Т передающих антенн передающим объектом, по одному набору R последовательностей принятых символов и одному набору Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона, где R, S и Т - целые числа, большие, чем единица, причем набор Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона пространственно обрабатывается с помощью, по меньшей мере, одной матрицы управления в передающем объекте для рандомизации действующего канала MIMO, наблюдаемого набором Т последовательностей символов пилот-сигнала и данных;
вывод оценки отклика канала для действующего канала MIMO для каждого поддиапазона на основе принятых символов пилот-сигнала в S наборах R последовательностей принятых символов; и
выполнение пространственной обработки приемника над принятыми символами данных в наборе R последовательностей принятых символов для каждого поддиапазона с помощью оценки отклика канала для действующего канала MIMO для поддиапазона для получения обнаруженных символов для поддиапазона.
множество (R) демодуляторов, предназначенных для обеспечения принятых символов пилот-сигнала и принятых символов данных, полученных для R приемных антенн, причем S наборов R последовательностей принятых символов получаются через R приемных антенн для S наборов Т последовательностей символов пилот-сигнала и данных, переданных посредством S поддиапазонов Т передающих антенн передающим объектом, по одному набору R последовательностей принятых символов и одному набору Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона, где R, S и Т - целые числа, большие, чем единица, причем набор Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона пространственно обрабатывается с помощью, по меньшей мере, одной матрицы управления в передающем объекте для рандомизации действующего канала MIMO, наблюдаемого набором Т последовательностей символов пилот-сигнала и данных;
модуль оценивания канала, предназначенный для получения оценки отклика канала для действующего канала MIMO для каждого поддиапазона на основе принятых символов пилот-сигнала и матриц управления, используемых для передачи данных передающим объектом; и
пространственный процессор, предназначенный для выполнения пространственной обработки приемника над принятыми символами данных для каждого поддиапазона на основе оценки отклика канала для действующего канала MIMO для поддиапазона, для получения обнаруженных символов для поддиапазона.
средство для получения, через R приемных антенн, S наборов R последовательностей принятых символов для S наборов Т последовательностей символов пилот-сигнала и данных, переданных по S поддиапазонам Т передающих антенн передающим объектом, по одному набору R последовательностей принятых символов и одному набору Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона, где R, S и Т - целые числа, большие, чем единица, причем набор Т последовательностей символов пилот-сигнала и данных для каждого поддиапазона пространственно обрабатывается с помощью, по меньшей мере, одной матрицы управления в передающем объекте для рандомизации действующего канала MIMO, соответствующего набору Т последовательностей символов пилот-сигнала и данных;
средство для вывода оценки отклика канала для действующего канала MIMO для каждого поддиапазона на основе принятых символов пилот-сигнала в S наборах R последовательностей принятых символов; и
средство для выполнения пространственной обработки приемника над принятыми символами данных в наборе R последовательностей принятых символов для каждого поддиапазона с помощью оценки отклика канала для действующего канала MIMO для поддиапазона для получения обнаруженных символов для поддиапазона.
| US 2004002364 A, 01.01.2004 | |||
| US 2003128658 A, 10.07.2003 | |||
| WO 03015334 A, 20.02.2003 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАМЕРА ИЗНОСА ГУСЕНИЧНОГОПОЛОТНА | 0 |
|
SU176110A1 |
| US 2003073464 A, 17.04.2003 | |||
| ИСПОЛЬЗОВАНИЕ ОРТОГОНАЛЬНЫХ СИГНАЛОВ ДЛЯ ОБЕСПЕЧЕНИЯ СОВМЕСТНОГО ИСПОЛЬЗОВАНИЯ МНОЖЕСТВОМ ПЕРЕДАТЧИКОВ КАНАЛА МУЛЬТИПЛЕКСНОЙ ПЕРЕДАЧИ С КОДОВЫМ РАЗДЕЛЕНИЕМ | 1997 |
|
RU2202152C2 |

