Область техники
Настоящее изобретение относится к системам связи, более конкретно к методам передачи данных в системе связи с множеством антенн, которая использует мультиплексирование с ортогональным частотным разнесением (OFDM).
Мультиплексирование с ортогональным частотным разнесением представляет собой метод модуляции с множеством несущих, который эффективно подразделяет всю ширину полосы системы на множество (NF) ортогональных поддиапазонов, которые также упоминаются как тона, поднесущие, элементы разрешения и частотные каналы. При использовании OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может модулироваться данными. OFDM широко используется в различных беспроводных системах связи, таких как те, которые реализуют хорошо известные стандарты IEEE 802.11а и 802.11g. Стандарты IEEE 802.11а и 802.11g, в основном, определяют режим функционирования «с одним входом и одним выходом» (SISO), причем передающее устройство использует одну антенну для передачи данных, а принимающее устройство использует одну антенну для приема данных.
Система связи с множеством антенн использует устройства с одной антенной и устройства с множеством антенн. В этой системе устройство с множеством антенн может использовать свое множество антенн для передачи данных на устройство с одной антенной. Устройство с множеством антенн и устройство с одной антенной могут реализовать любую из ряда традиционных схем разнесения при передаче, чтобы обеспечить разнесение при передаче и повысить эффективность передачи данных. Одна такая схема разнесения при передаче описана в статье S.M. Alamouti, “A Simple Transmit Diversity Technique for Wireless Communications”, IEEE Journal on Selected Areas in Communications, Vol.16, No.8, October 1998, pp.1451-1458. В случае схемы Аламоути передающее устройство передает каждую пару символов данных с двух антенн в двух периодах символов и приемное устройство объединяет два принятых символа, полученных для двух периодов символов, для восстановления пары символов данных. Схема Аламоути, как и большинство других известных схем разнесения при передаче требует от приемного устройства выполнения специальной обработки, которая может различаться для разных схем, чтобы восстановить переданные данные и получить выигрыш за счет разнесения при передаче.
Однако устройство с одной антенной может предназначаться только для работы в режиме SISO, как описано ниже. Это обычно имеет место, если беспроводное устройство создано в соответствии со стандартами IEEE 802.11а и 802.11g. Такие «унаследованные» устройства с одной антенной не смоги бы выполнять специальную обработку, требуемую большинством из современных схем разнесения при передаче. Тем не менее, все еще весьма желательно для устройства с множеством антенн передавать данные на традиционное устройство с одной антенной таким образом, чтобы можно было обеспечить улучшенную надежность и/или повышенную эффективность.
Поэтому в технике существует потребность в способах реализации разнесения при передаче в традиционных принимающих устройствах с одной антенной.
Сущность изобретения
Ниже представлены способы передачи данных от передающего объекта с множеством антенн к принимающему устройству с одной антенной с использованием управляемого режима и/или режима псевдослучайного управления передачей (PRTS). В управляемом режиме передающий объект выполняет пространственную обработку для направления передачи данных к принимающему объекту. В режиме PRTS передающий объект выполняет пространственную обработку таким образом, что передача данных использует случайные действующие SISO-каналы в поддиапазонах, и эффективность не определяется реализацией канала плохого качества. Передающий объект может использовать (1) управляемый режим, если он знает отклик канала с множеством входов и одним выходом (MISO) для принимающего объекта, и (2) PRTS-режим, даже если он не знает отклика MISO-канала.
Передающий объект выполняет пространственную обработку с использованием (1) управляющих векторов, полученных из оценок отклика MISO-канала для управляемого режима, и (2) векторов псевдослучайного управления для PRTS-режима. Каждый управляющий вектор является вектором с NT элементами, который может умножаться на символ данных для генерации NT символов передачи для передачи NT передающими антеннами, где NT>1.
PRTS-режим может использоваться для реализации разнесения при передаче, не требуя выполнения приемным объектом какой-либо специальной обработки. Для разнесения при передаче передающий объект использует (1) различные векторы псевдослучайного управления по поддиапазонам, используемым для передачи данных, и (2) один и тот же управляющий вектор по псевдослучайно управляемой части блока протокола данных (PDU) для каждого поддиапазона. Блок PDU является блоком передачи. Принимающему объекту не требуется иметь сведения о векторах псевдослучайного управления, используемых передающим объектом. PRTS-режим может использоваться для реализации пространственного расширения, например для защищенной передачи данных. Для пространственного расширения передающий объект использует (1) различные векторы псевдослучайного управления по поддиапазонам и (2) различные управляющие векторы по псевдослучайно управляемой части блока PDU для каждого поддиапазона. Для защищенной передачи данных только передающий и принимающий объекты знают векторы управления, используемые для передачи данных. Управляемый режим и PRTS-режим могут использоваться для передачи данных от передающего объекта с множеством антенн к принимающему объекту с множеством антенн, как описано ниже. Различные аспекты и варианты осуществления изобретения описаны более подробно ниже.
Краткое описание чертежей
Фиг.1 - система связи с множеством антенн;
фиг.2 - обобщенный формат PDU;
фиг.3 - передача пилот-сигнала от передающего объекта с двумя антеннами к принимающему объекту с одной антенной;
фиг.4 - процесс передачи данных с использованием управляемого режима или PRTS-режима;
фиг.5 - процесс передачи данных с использованием обоих режимов;
фиг.6А и 6В - два конкретных формата PDU;
фиг.7 - передающий объект и два приемных объекта;
фиг.9А - блок-схема приемного объекта с одной антенной;
фиг.9В - блок-схема приемного объекта с множеством антенн.
Детальное описание
Термин «примерный» используется в настоящем описании в смысле «служащий в качестве примера, экземпляра или иллюстрации». Любой вариант осуществления, описанный как примерный, не обязательно должен толковаться как предпочтительный или преимущественный по отношению к другим вариантам осуществления.
На фиг.1 представлена система 100 с множеством антенн, содержащая пункт доступа (ПД) 110 и пользовательские терминалы (ПТ) 120. Пункт доступа в общем случае представляет собой стационарную станцию, которая осуществляет связь с пользовательскими терминалами и может также называться базовой станцией или определяться некоторым иным термином. Пользовательский терминал может быть стационарным или мобильным и может также упоминаться как мобильная станция, беспроводное устройство, пользовательское оборудование или определяться некоторым иным термином. Контроллер 130 системы связан с пунктами доступа и обеспечивает координацию и управление для этих пунктов доступа.
Пункт доступа 110 оснащен множеством антенн для передачи данных. Каждый пользовательский терминал 120 может быть оснащен одной антенной или множеством антенн для передачи данных. Пользовательский терминал может осуществлять связь с пунктом доступа и в этом случае функции пункта доступа и пользовательского терминала установлены. Пользовательский терминал может также осуществлять одноранговую связь с другим пользовательским терминалом. В последующем описании предполагается, что передающий объект может быть пунктом доступа или пользовательским терминалом, и принимающий объект также может быть пунктом доступа или пользовательским терминалом. Передающий объект оснащен множеством (NT) передающих антенн, а принимающий объект может быть оснащен одной или множеством (NR) приемных антенн. MISO-передача имеет место, когда принимающий объект оснащен одной приемной антенной, а передача с множеством входов и множеством выходов (MIMO) имеет место, когда принимающий объект оснащен множеством приемных антенн.
Система 100 может использовать структуру канала, соответствующую дуплексной передаче с временным разделением (TDD) или дуплексной передаче с частотным разделением (FDD). В случае TDD-структуры, нисходящая линия связи и восходящая линия связи совместно используют одну и ту же полосу частот, причем нисходящей линии связи выделена часть времени и восходящей линии связи выделена остальная часть времени. В случае FDD-структуры, нисходящей линии связи и восходящей линии связи выделены отдельные полосы частот. Для ясности, в последующем описании предполагается, что система 100 использует TDD-структуру.
Система 100 также использует для передачи данных мультиплексирование с ортогональным частотным разделением (OFDM). OFDM обеспечивает всего NF поддиапазонов, из которых ND поддиапазонов используются для передачи данных и называются поддиапазонами данных, NP поддиапазонов используются для пилот-сигнала и называются поддиапазонами пилот-сигнала и остальные NG
 поддиапазонов не используются и служат в качестве защитных поддиапазонов, где NF=ND+NP+NG. В каждом периоде OFDM-символа до ND символов данных могут посылаться в ND поддиапазонах данных и до NP символов пилот-сигнала могут посылаться в NP поддиапазонах пилот-сигнала. В настоящем описании под «символом данных» понимается символ модуляции для данных, а под «символом пилот-сигнала» понимается символ модуляции для пилот-сигнала. Символы пилот-сигнала известны заранее как передающему, так и принимающему объекту.
поддиапазонов не используются и служат в качестве защитных поддиапазонов, где NF=ND+NP+NG. В каждом периоде OFDM-символа до ND символов данных могут посылаться в ND поддиапазонах данных и до NP символов пилот-сигнала могут посылаться в NP поддиапазонах пилот-сигнала. В настоящем описании под «символом данных» понимается символ модуляции для данных, а под «символом пилот-сигнала» понимается символ модуляции для пилот-сигнала. Символы пилот-сигнала известны заранее как передающему, так и принимающему объекту.
Для OFDM-модуляции, NF значений частотной области (для ND символов данных, NP символов пилот-сигнала и NG нулей) преобразуются во временную область с помощью NF-точечного обратного быстрого преобразования Фурье (ОБПФ) для получения «преобразованного» символа, который содержит NF элементарных посылок временной области. Для противодействия межсимвольным помехам (МСП), которые обусловлены частотно-селективным замиранием, часть каждого преобразованного символа повторяется для формирования соответствующего OFDM-символа. Повторенная часть часто упоминается как циклический префикс или защитный интервал. Период OFDM-символа (который здесь также упоминается просто как «период символа») представляет собой длительность одного OFDM-символа.
Фиг.2 показывает примерный формат 200 блока данных протокола (PDU), который может быть использован для системы 100. Данные обрабатываются на более высоком уровне как блоки данных. Каждый блок 210 данных кодируется и модулируется (или отображается на символы) отдельно на основе схемы кодирования и модуляции, выбранной для данного блока данных. Каждый блок 210 данных ассоциирован с частью 220 сигнализации, которая содержит различные параметры (например, скорость передачи и длину) для этого блока данных, которые используются принимающим объектом для обработки и восстановления блока данных. Часть сигнализации может обрабатываться с использованием той же или другой схемы кодирования и модуляции по сравнению с использованной для блока данных. Каждый блок данных и его часть сигнализации модулируются согласно схеме OFDM для формирования части 250 сигнализации/данных блока PDU 230. Блок данных передается как в поддиапазонах, так и периодах символов в части данных блока PDU. PDU 230 также содержит преамбулу 240, которая содержит один или более типов пилот-сигнала, используемого для различных целей принимающим объектом. В общем случае преамбула 240 и часть 250 сигнализации/данных могут иметь фиксированную или переменную длину и могут содержать любое число OFDM-символов. Блок PDU
230 может также упоминаться как пакет или определяться некоторым иным термином.
Принимающий объект в типовом случае обрабатывает каждый блок PDU отдельно. Принимающий объект использует преамбулу блока PDU для автоматической регулировки усиления (АРУ), выбора при разнесении (для выбора одного из нескольких входных портов для обработки), временной синхронизации, грубого и точного определения частоты, оценивания канала и т.д. Принимающий объект использует информацию, полученную из преамбулы, для обработки части сигнализации/данных блока PDU.
В принципе, псевдослучайное управление передачей может применяться ко всему блоку PDU или к части блока PDU, в зависимости от различных факторов. Псевдослучайно управляемая часть блока PDU может таким образом представлять собой весь блок PDU или его часть.
1. MISO-передача
В системе 100 MISO-канал существует между передающим объектом с множеством антенн и принимающим объектом с одной антенной. Для системы на основе OFDM MISO-канал, образованный NT антеннами в передающем объекте и единственной антенной в принимающем объекте, может характеризоваться набором из NF векторов-строк отклика канала, каждый из которых имеет размерность 1хNT, что может быть выражено следующим образом:

где элемент записи hj(k) для j=1… NT обозначает связь или комплексное усиление между передающей антенной j и единственной приемной антенной для поддиапазона k, и K обозначает набор NF поддиапазонов. Для простоты отклик  MISO-канала предполагается постоянным для всего блока PDU и является таким образом функцией только поддиапазона k.
MISO-канала предполагается постоянным для всего блока PDU и является таким образом функцией только поддиапазона k.
Передающий объект может передавать данные от своего множества антенн к принимающему объекту с единственной антенной таким способом, что может быть обеспечена улучшенная надежность и/или эффективность. Более того, передача данных может быть такой, что принимающий объект с единственной антенной может выполнять нормальную обработку для SISO-операции (и не требует выполнения какой-либо другой специальной обработки для разнесения передачи), чтобы восстановить переданные данные.
Передающий объект может передавать данные к принимающему объекту с единственной антенной с использованием управляемого режима или PRTS-режима. В управляемом режиме передающий объект выполняет пространственную обработку для направления передачи данных на принимающий объект. В PRTS-режиме, передающий объект выполняет пространственную обработку таким образом, что передача данных воспринимает случайные действующие SISO-каналы в поддиапазонах. PRTS-режим может использоваться для реализации разнесения при передаче, не требуя, чтобы принимающий объект выполнял какую-либо специальную обработку. PRTS-режим может также использоваться для реализации пространственного расширения, например, в целях обеспечения защищенной передачи. Оба эти режима и оба эти применения для PRTS-режима описаны ниже.
А. Управляемый режим для MISO
Передающий объект выполняет пространственную обработку для каждого поддиапазона для управляемого режима следующим образом:

где s(n,k) - символ данных, который должен передаваться в поддиапазоне k в периоде n символа;
 - управляющий NTx1-вектор для поддиапазона k в периоде n символа и
- управляющий NTx1-вектор для поддиапазона k в периоде n символа и
 - NTx1-вектор с NT символами передачи для передачи от NT антенн в поддиапазоне k в периоде n символа.
- NTx1-вектор с NT символами передачи для передачи от NT антенн в поддиапазоне k в периоде n символа.
В последующем описании индекс “sm” обозначает управляемый режим, “pm” обозначает PRTS-режим, “miso” обозначает MISO-передачу и “mimo” обозначает MIMO-передачу. В случае OFDM, один подпоток символов данных может посылаться в каждом поддиапазоне данных. Передающий объект выполняет пространственную обработку для каждого поддиапазона данных отдельно.
Для управляемого режима управляющие векторы выводятся на основе вектора-строки оценки канала следующим образом:

где  обозначает аргумент от
обозначает аргумент от  и “H” обозначает комплексно-сопряженное транспонирование. Аргумент обеспечивает элементы, имеющие единичную величину и различные фазы, определяемые элементами , так что полная мощность каждой передающей антенны может использоваться для передачи данных. Поскольку отклик канала предполагается постоянным по каждому блоку PDU, то управляющий вектор также предполагается постоянным по каждому блоку PDU и является функцией только поддиапазона k.
и “H” обозначает комплексно-сопряженное транспонирование. Аргумент обеспечивает элементы, имеющие единичную величину и различные фазы, определяемые элементами , так что полная мощность каждой передающей антенны может использоваться для передачи данных. Поскольку отклик канала предполагается постоянным по каждому блоку PDU, то управляющий вектор также предполагается постоянным по каждому блоку PDU и является функцией только поддиапазона k.
Принятые символы в принимающем объекте могут быть выражены следующим образом:

где rsm(n,k) - принятый символ для поддиапазона k в периоде n символа;
heff,sm(k) - отклик действующего SISO-канала для поддиапазона k, который равен
heff,sm(k)=
 и
и
z(n,k) - шум для поддиапазона k в периоде n символа.
Как показано в уравнении (4), пространственная обработка, выполняемая передающим объектом, приводит к получению подпотока символов данных в каждом поддиапазоне k, воспринимающего отклик heff,sm(k) действующего SISO-канала, который включает в себя отклик фактического MISO-канала и управляющий вектор  . Принимающий объект может оценить отклик heff,sm(k) действующего SISO-канала, например, на основе символов пилот-сигнала, принимаемых от передающего объекта. Принимающий объект может затем выполнить детектирование (например, согласованную фильтрацию) принятых символов rsm(n,k) с оценкой
. Принимающий объект может оценить отклик heff,sm(k) действующего SISO-канала, например, на основе символов пилот-сигнала, принимаемых от передающего объекта. Принимающий объект может затем выполнить детектирование (например, согласованную фильтрацию) принятых символов rsm(n,k) с оценкой  отклика действующего SISO-канала для получения продетектированных символов
отклика действующего SISO-канала для получения продетектированных символов  , которые являются оценками переданных символов s(n,k) данных.
, которые являются оценками переданных символов s(n,k) данных.
Принимающий объект может затем выполнить согласованную фильтрацию в следующем виде:

где “*” обозначает сопряжение. Операция детектирования в уравнении (5) является той же, что и операция, которая выполнялась бы принимающим объектом для SISO-передачи. Однако вместо оценки отклика SISO-канала для детектирования используется оценка отклика действующего SISO-канала.
В. PRTS-режим для разнесения при передаче
Для PRTS-режима передающий объект использует для пространственной обработки псевдослучайные управляющие векторы. Эти управляющие векторы выводятся для обеспечения некоторых желательных свойств, как описано ниже.
Для реализации разнесения при передаче в PRTS-режиме передающий объект использует один и тот же управляющий вектор для псевдослучайно управляемой части блока PDU для каждого поддиапазона k. Управляющие векторы будут тогда функцией только поддиапазона k, но не периода n символа, или  . В принципе, желательно использовать по возможности больше различных управляющих векторов в поддиапазоне, чтобы реализовать более высокую степень разнесения. Например, отличающийся управляющий вектор может быть использован для каждого поддиапазона данных. Набор ND управляющих векторов, обозначенный как
. В принципе, желательно использовать по возможности больше различных управляющих векторов в поддиапазоне, чтобы реализовать более высокую степень разнесения. Например, отличающийся управляющий вектор может быть использован для каждого поддиапазона данных. Набор ND управляющих векторов, обозначенный как
 , может использоваться для пространственной обработки для ND поддиапазонов данных. Один и тот же набор управляющих векторов используется для каждого блока PDU (например, для преамбулы и части сигнализации/данных для формата блока PDU, показанного на фиг.2). Набор управляющих векторов может быть одинаковым или меняться для разных блоков PDU.
, может использоваться для пространственной обработки для ND поддиапазонов данных. Один и тот же набор управляющих векторов используется для каждого блока PDU (например, для преамбулы и части сигнализации/данных для формата блока PDU, показанного на фиг.2). Набор управляющих векторов может быть одинаковым или меняться для разных блоков PDU.
Передающий объект выполняет пространственную обработку для каждого поддиапазона в следующем виде:

Один набор управляющих векторов используется для всех OFDM-символов в блоке PDU.
Принятые символы в принимающем объекте могут быть выражены следующим образом:

Отклик heff,td(k) действующего SISO-канала для каждого поддиапазона определяется откликом фактического MISO-канала для данного поддиапазона и управляющим вектором , используемым для данного поддиапазона. Отклик
heff,td(k) действующего SISO-канала для каждого поддиапазона k является постоянным для блока PDU, так как отклик фактического MISO-канала предполагается постоянным для блока PDU, и один и тот же управляющий вектор используется для блока PDU.
Принимающий объект принимает переданный блок PDU и выводит оценку
 отклика действующего SISO-канала для каждого поддиапазона на основе преамбулы. Принимающий объект затем использует оценку отклика действующего SISO-канала для выполнения детектирования принимаемых символов в части сигнализации/данных блока PDU, как показано в уравнении (5),
отклика действующего SISO-канала для каждого поддиапазона на основе преамбулы. Принимающий объект затем использует оценку отклика действующего SISO-канала для выполнения детектирования принимаемых символов в части сигнализации/данных блока PDU, как показано в уравнении (5),
где заменено на .
Для разнесения при передаче принимающему объекту не требуется знать то, использована ли одна антенна или множество антенн для передачи данных, и не требуется знать управляющий вектор, используемый для каждого поддиапазона. Принимающий объект может, тем не менее, извлечь выгоду из разнесения при передаче, поскольку разные управляющие векторы используются в поддиапазонах и разные действующие SISO-каналы формируются для этих поддиапазонов. Каждый блок PDU будет затем воспринимать ансамбль псевдослучайных SISO-каналов в диапазонах, используемых для передачи блока PDU.
С. PRTS-режим для пространственного расширения
Пространственное расширение может использоваться для рандомизации передачи данных по пространственному измерению. Пространственное расширение может использоваться для защищенной передачи данных между передающим объектом и принимающим объектом получателя, чтобы предотвратить неавторизованный прием передачи данных другими принимающими объектами.
Для пространственного расширения в PRTS-режиме передающий объект использует различные управляющие векторы для псевдослучайно управляемой части блока PDU для каждого поддиапазона k. Управляющие векторы будут тогда функцией как поддиапазона, так и периода символа, или  . В общем случае, желательно использовать по возможности больше различных управляющих векторов по поддиапазонам и периодам символов, чтобы достичь более высокой степени пространственного расширения. Например, отличающийся управляющий вектор может быть использован для каждого поддиапазона данных для данного периода символа, и отличающийся управляющий вектор может использоваться для каждого периода символа для данного поддиапазона. Набор из ND управляющих векторов, обозначенный как
. В общем случае, желательно использовать по возможности больше различных управляющих векторов по поддиапазонам и периодам символов, чтобы достичь более высокой степени пространственного расширения. Например, отличающийся управляющий вектор может быть использован для каждого поддиапазона данных для данного периода символа, и отличающийся управляющий вектор может использоваться для каждого периода символа для данного поддиапазона. Набор из ND управляющих векторов, обозначенный как  , может использоваться для пространственной обработки для ND поддиапазонов данных для одного периода символа, и другой набор может использоваться для каждого интервала символа в блоке PDU. Как минимум, различные наборы управляющих векторов используются для преамбулы и для части сигнализации/данных блока PDU, где один набор может включать в себя векторы из всех единиц. Наборы управляющих векторов могут быть одними и теми же или могут изменяться от блока к блоку PDU.
, может использоваться для пространственной обработки для ND поддиапазонов данных для одного периода символа, и другой набор может использоваться для каждого интервала символа в блоке PDU. Как минимум, различные наборы управляющих векторов используются для преамбулы и для части сигнализации/данных блока PDU, где один набор может включать в себя векторы из всех единиц. Наборы управляющих векторов могут быть одними и теми же или могут изменяться от блока к блоку PDU.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

Принятые символы в принимающем объекте могут быть выражены следующим образом:

Отклик heff,ss(k) действующего SISO-канала для каждого поддиапазона каждого периода символа определяется откликом фактического MISO-канала для данного поддиапазона и управляющим вектором  , используемым для данного поддиапазона и периода символа. Отклик heff,ss(k) действующего SISO-канала для каждого поддиапазона k изменяется по блоку PDU, если разные управляющие векторы
, используемым для данного поддиапазона и периода символа. Отклик heff,ss(k) действующего SISO-канала для каждого поддиапазона k изменяется по блоку PDU, если разные управляющие векторы  используются для блока PDU.
используются для блока PDU.
Принимающий объект получателя знает управляющие векторы, используемые передающим объектом, и может выполнить комплементарное пространственное сжатие для восстановления переданного блока PDU. Принимающий объект получателя может получить эту информацию разными способами, как описано ниже. Другие принимающие объекты не имеют информации об управляющих векторах, и передачи блоков PDU для этих объектов выглядят случайными. Вероятность корректного восстановления PDU таким образом существенно снижается для этих принимающих объектов.
Принимающий объект получателя принимает переданный PDU и использует преамбулу для оценивания канала. Для каждого поддиапазона принимающий объект получателя может вывести оценку отклика фактического MISO-канала (вместо оценки действительного SISO-канала) для каждой передающей антенны или
 для j=1 … NT на основе преамбулы. Для простоты ниже описано оценивание канала для случая с двумя передающими антеннами.
для j=1 … NT на основе преамбулы. Для простоты ниже описано оценивание канала для случая с двумя передающими антеннами.
Фиг.3 показывает модель передачи пилот-сигнала в одном поддиапазоне k от передающего объекта с двумя антеннами к принимающему объекту с единственной приемной антенной. Символ p(k) пилот-сигнала пространственно обрабатывается двумя элементами v1(n,k) и v2(n,k) управляющего вектора для получения двух символов передачи, которые затем передаются от двух передающих антенн. Двум символам передачи соответствуют отклики h1(k) и h2(k) канала, которые предполагаются постоянными для блока PDU.
Если символ p(k) пилот-сигнала передается в двух периодах символа с использованием двух наборов управляющих векторов  и
и  , то принятые символы пилот-сигнала в принимающем объекте могут быть выражены следующим образом:
, то принятые символы пилот-сигнала в принимающем объекте могут быть выражены следующим образом:

что может быть выражено в матричной форме следующим образом:

где  - вектор с двумя принятыми символами пилот-сигнала для поддиапазона k, где “Т” обозначает транспонирование;
- вектор с двумя принятыми символами пилот-сигнала для поддиапазона k, где “Т” обозначает транспонирование;
 - матрица с двумя управляющими векторами
- матрица с двумя управляющими векторами  и
и  , используемыми для поддиапазона k;
, используемыми для поддиапазона k;
 - вектор-строка отклика канала для поддиапазона k и
- вектор-строка отклика канала для поддиапазона k и
 - вектор шума для поддиапазона k.
- вектор шума для поддиапазона k.
Принимающий объект может получить оценку  отклика MISO-канала в следующем виде:
отклика MISO-канала в следующем виде:

Принимающий объект получателя может вычислить  , поскольку он знает все элементы . Другие принимающие объекты не знают , не могут вычислить
, поскольку он знает все элементы . Другие принимающие объекты не знают , не могут вычислить  и не могут получить достаточно точную оценку
и не могут получить достаточно точную оценку  .
.
Приведенное выше описание относится к случаю с двумя передающими антеннами. В принципе, число передающих антенн определяет число ОFDM-символов для пилот-сигнала (длину передачи пилот-сигнала) и размер . В частности, символы пилот-сигнала передаются минимум для NT периодов символов и матрица в типовом случае имеет размер NT х NT.
Принимающий объект получателя может затем вывести оценку  отклика действующего SISO-канала для каждого последующего OFDM-символа в блоке PDU следующим образом:
отклика действующего SISO-канала для каждого последующего OFDM-символа в блоке PDU следующим образом:

Управляющий вектор может изменяться от периода к периоду символов для каждого поддиапазона. Однако принимающий объект получателя знает управляющий вектор, используемый для каждого периода символа. Принимающий объект использует оценку  отклика действующего SISO-канала для каждого периода символа для выполнения детектирования принятого символа для данного поддиапазона и периода символа, например, как показано в уравнении (5), где заменено на
отклика действующего SISO-канала для каждого периода символа для выполнения детектирования принятого символа для данного поддиапазона и периода символа, например, как показано в уравнении (5), где заменено на  и изменяется по блоку PDU.
и изменяется по блоку PDU.
Передающий объект может также передать пилот-сигнал «в открытом виде» без какой-либо пространственной обработки, но с умножением символов пилот-сигнала для каждой передающей антенны на отличающуюся ортогональную последовательность (например, последовательность Уолша) длины NT или целого кратного значения NT. В этом случае принимающий объект может оценить отклик MISO-канала непосредственно путем умножения принятых символов пилот-сигнала на каждую ортогональную последовательность, используемую для передачи пилот-сигнала, и интегрирования по длине последовательности, как известно в технике. Альтернативно, передающий объект может передать пилот-сигнал с использованием одного управляющего вектора  , и принимающий объект может оценить отклик действующего MISO-канала в следующем виде:
, и принимающий объект может оценить отклик действующего MISO-канала в следующем виде:

Передающий объект может затем передать данные с использованием другого управляющего вектора  , и принимающий объект может оценить отклик действующего MISO-канала в следующем виде:
, и принимающий объект может оценить отклик действующего MISO-канала в следующем виде:

Передача пилот-сигнала и оценивание канала могут быть выполнены различными способами для пространственного расширения.
Передающий объект может выполнять пространственное расширение как преамбулы, так и части сигнализации/данных блока PDU. Передающий объект может также выполнять пространственное расширение только для преамбулы или только части сигнализации/данных. В любом случае пространственное расширение таково, что оценка канала, полученная на основе преамбулы, не является точной или действительной для части сигнализации/данных. Улучшенные показатели могут быть достигнуты за счет выполнения пространственного расширения, по меньшей мере, по части сигнализации/данных блока PDU, так что эта часть представляется пространственно случайной для других принимающих объектов, без знания управляющих векторов.
Для пространственного расширения принимающий объект получателя знает, что для передачи данных используется множество антенн, и, кроме того, знает управляющий вектор, используемый для каждого поддиапазона в каждом периоде символа. Пространственное сжатие по существу реализуется использованием надлежащих управляющих векторов, чтобы вывести оценки отклика действующего SISO-канала, которые затем используются для детектирования. Принимающий объект получателя также извлекает выгоды от разнесения при передаче, поскольку различные управляющие векторы используются для блока PDU. Другие принимающие объекты не знают управляющие векторы, используемые передающим объектом. Таким образом, их оценки отклика действующего SISO-канала не действительны для части сигнализации/данных и при использовании для детектирования данных приведут к получению ухудшенных или искаженных продетектированных символов. Соответственно, на вероятность восстановления переданного блока PDU может оказываться существенное влияние для таких других принимающих объектов. Поскольку принимающий объект должен выполнять специальную обработку для оценивания канала и детектирования для пространственного расширения, обычные принимающие объекты, которые спроектированы для работы только в режиме SISO, также не смогут восстановить пространственно расширенную передачу данных.
Пространственное расширение может выполняться для управляемого режима и PRTS-режима путем поворота фазы каждого символа данных псевдослучайным способом, который известен как передающему, так и принимающему объектам.
На фиг.4 показана блок-схема процесса 400 передачи данных от передающего объекта к принимающему объекту в PRTS-режиме. Каждый блок PDU данных обрабатывается (например, кодируется, перемежается и отображается на символы) для получения соответствующего блока символов данных (блок 412). Блок символов данных и символы пилот-сигнала демультиплексируются в ND поддиапазонов данных для получения ND последовательностей пилот-сигнала и символов данных для ND поддиапазонов (блок 414). Пространственная обработка выполняется затем над последовательностью пилот-сигнала и символов данных для каждого из поддиапазонов, по меньшей мере, с одним управляющим вектором, выбранным для поддиапазона (блок 416).
Для управляемого режима один управляющий вектор используется для каждого поддиапазона данных, и пространственная обработка с этим управляющим вектором управляет передачей к принимающему объекту. Для разнесения при передаче в PRTS-режиме один псевдослучайный управляющий вектор используется для каждого поддиапазона данных и принимающему объекту не требуется иметь информацию об управляющем векторе. Для пространственного расширения в PRTS-режиме, по меньшей мере, один псевдослучайный управляющий вектор используется для каждого поддиапазона данных, причем различное управление применяется для преамбулы и для части сигнализации/данных, и только передающий и принимающий объекты имеют информацию об управляющих векторах. Для PRTS-режима пространственная обработка с псевдослучайными управляющими векторами рандомизирует ND действующих SISO-каналов, воспринимаемых ND последовательностями символов пилот-сигналов и данных, переданных в ND поддиапазонах.
Принимающий объект может не иметь возможности надлежащим образом обрабатывать передачи данных, посланных с использованием PRTS-режима. Это может иметь место, например, в случае, когда принимающий объект предполагает, что отклик канала в некоторой степени коррелирован по поддиапазонам и использует некоторую форму интерполяции по поддиапазонам для оценивания канала. В этом случае передающий объект может осуществлять передачу в «открытом» режиме, без какой-либо пространственной обработки. Передающий объект может также определить или выбрать управляющие векторы таким образом, чтобы облегчить оценивание канала для такого принимающего объекта. Например, передающий объект может использовать тот же самый управляющий вектор для каждого набора из NХ поддиапазонов, где NХ>1. В качестве другого примера, управляющие вектора могут быть определены как коррелированные (например, как полученные поворотом один из другого) по поддиапазонам.
D. Многорежимная операция
Передающий объект может также передавать данные к принимающему объекту с использованием как управляемого режима, так и PRTS-режима. Передающий объект может использовать PRTS-режим, если отклик канала не известен, и переключаться на управляемый режим как только отклик канала становится известным. Для системы TDD отклики нисходящего канала и восходящего канала предполагаются взаимно обратными. То есть, если  представляет вектор-строку отклика канала от передающего объекта к принимающему объекту, то взаимно обратный канал означает, что отклик канала от принимающего объекта к передающему объекту будет определяться как
представляет вектор-строку отклика канала от передающего объекта к принимающему объекту, то взаимно обратный канал означает, что отклик канала от принимающего объекта к передающему объекту будет определяться как  . Передающий объект может оценить отклик канала для одного канала (например, для нисходящего канала) на основе передачи пилот-сигнала, посланного принимающим объектом по другому каналу (например, по восходящему каналу).
. Передающий объект может оценить отклик канала для одного канала (например, для нисходящего канала) на основе передачи пилот-сигнала, посланного принимающим объектом по другому каналу (например, по восходящему каналу).
На фиг.5 показана блок-схема процесса 500 для передачи данных от передающего объекта к принимающему объекту с использованием как управляемого режима, так и PRTS-режима. Первоначально, передающий объект передает данные к принимающему объекту с использованием PRTS-режима, поскольку он не имеет оценок отклика канала для принимающего объекта (блок 512). Передающий объект получает оценки отклика канала для линии связи между передающим объектом и принимающим объектом (блок 514). Например, передающий объект может (1) оценить отклик канала для первой линии связи (например, восходящей линии связи) на основе пилот-сигнала, посланного принимающим объектом, и (2) вывести оценки отклика канала для второй линии связи (например, нисходящей линии связи) на основе (например, как взаимно обратная величина) оценок отклика канала для первой линии связи. Передающий объект затем передает данные к принимающему объекту с использованием управляемого режима с управляющими векторами, полученными из оценок отклика канала для второй линии связи, как только оценки отклика канала для принимающего объекта становятся доступными (блок 516).
Передающий объект может переходить между управляемым режимом и PRTS-режимом, в зависимости от того, доступны или нет оценки отклика канала. Принимающий объект выполняет ту же самую обработку для оценивания канала и детектирования для обоих режимов и ему не требуется знать, какой режим был использован передающим объектом для любого конкретного блока PDU. Более высокие показатели могут обычно достигаться в управляемом режиме, и передающий объект может использовать более высокую скорость передачи для управляемого режима. В любом случае передающий объект может сигнализировать о скорости, используемой для каждого блока PDU, в части сигнализации блока PDU. Принимающий объект должен тогда обрабатывать каждый блок PDU на основе оценок канала, полученных для данного блока PDU, и в соответствии с указанной скоростью.
2. MIMO-передача
В системе 100 MIMO-канал существует между передающим объектом с множеством антенн и принимающим объектом с множеством антенн. Для системы на основе OFDM, MIMO-канал, образованный NT антеннами в передающем объекте и NR антеннами в принимающем объекте, может характеризоваться набором из NF матриц откликов каналов, каждая из которых имеет размер NR×NT, который может быть выражен следующим образом:

где элемент записи hi,j(k) для i=1… NR и j=1…NT обозначает связь между передающей антенной j и приемной антенной i для поддиапазона k. Для простоты отклик  MIMO-канала предполагается постоянным по каждому блоку PDU.
MIMO-канала предполагается постоянным по каждому блоку PDU.
Матрица отклика канала для каждого поддиапазона может быть разложена на NS пространственных каналов, где NS≤min{NT,NR}. NS пространственных каналов могут быть использованы для передачи данных таким способом, чтобы достичь более высокой надежности и/или более высокой пропускной способности в целом. Например, NS символов данных могут передаваться одновременно от NT передающих антенн в каждом периоде символа для достижения более высокой пропускной способности. Альтернативно, один символ данных может передаваться от NT передающих антенн в каждом периоде символа для достижения более высокой надежности. Для простоты в последующем описании предполагается, что NS=NT≤NR.
Передающий объект может передавать данные к принимающему объекту с использованием управляемого режима или PRTS-режима. В управляемом режиме для MIMO передающий объект выполняет пространственную обработку для передачи символов данных на «собственных модах» MIMO-канала, как описано ниже. В PRTS-режиме передающий объект выполняет пространственную обработку таким образом, что символы данных воспринимают случайные действующие MIMO-каналы. Управляемый режим и PRTS-режим используют различные управляющие матрицы и требуют различной пространственной обработки принимающим объектом. PRTS-режим может также использоваться для разнесения при передаче и для пространственного расширения.
А. Управляемый режим для MIMO
Для управляемого режима для MIMO передающий объект получает управляющие матрицы  путем выполнения декомпозиции по сингулярным значениям матрицы отклика канала для каждого поддиапазона следующим образом:
путем выполнения декомпозиции по сингулярным значениям матрицы отклика канала для каждого поддиапазона следующим образом:

где  - унитарная матрица размера NR×NR левых собственных векторов
- унитарная матрица размера NR×NR левых собственных векторов 
 - диагональная матрица размера NR×NT сингулярных значений
- диагональная матрица размера NR×NT сингулярных значений
- унитарная матрица размера NT×NT правых собственных векторов 
Унитарная матрица  характеризуется следующим свойством:
характеризуется следующим свойством:  где
где  - единичная матрица. Столбцы унитарной матрицы ортогональны друг другу. Поскольку матрица отклика канала предполагается постоянной по блоку PDU, управляющие матрицы также постоянны по блоку PDU и являются функцией только поддиапазона k.
- единичная матрица. Столбцы унитарной матрицы ортогональны друг другу. Поскольку матрица отклика канала предполагается постоянной по блоку PDU, управляющие матрицы также постоянны по блоку PDU и являются функцией только поддиапазона k.
Передающий объект выполняет пространственную обработку для каждого поддиапазона следующим образом:

где  - NTх1-вектор с NT символами данных, которые должны передаваться в поддиапазоне k в периоде n символа, и
- NTх1-вектор с NT символами данных, которые должны передаваться в поддиапазоне k в периоде n символа, и
 - NTх1-вектор с NT символами передачи, которые должны передаваться от NT передающих антенн в поддиапазоне k в периоде n символа.
- NTх1-вектор с NT символами передачи, которые должны передаваться от NT передающих антенн в поддиапазоне k в периоде n символа.
Пространственная обработка с использованием управляющих матриц
приводит к получению NT символов данных в  передаваемых на NT собственных модах MIMO-канала, которые могут рассматриваться как ортогональные пространственные каналы.
передаваемых на NT собственных модах MIMO-канала, которые могут рассматриваться как ортогональные пространственные каналы.
Принятые символы в принимающем объекте могут быть выражены следующим образом:

где  -NRх1 - вектор с NR принятыми символами для поддиапазона k в периоде n символа и
-NRх1 - вектор с NR принятыми символами для поддиапазона k в периоде n символа и
 - вектор шума для поддиапазона k в периоде n символа.
- вектор шума для поддиапазона k в периоде n символа.
Для простоты шум предполагается аддитивным белым гауссовым шумом (AWGN) с нулевым вектором среднего значения и матрицей ковариации  ,
,
где  - дисперсия шума, воспринимаемая принимающим объектом.
- дисперсия шума, воспринимаемая принимающим объектом.
Принимающий объект выполняет пространственную обработку для управляемого режима следующим образом:

где  - вектор с NT продетектированными символами для управляемого режима, который является оценкой , и
- вектор с NT продетектированными символами для управляемого режима, который является оценкой , и
 - вектор шума после детектирования.
- вектор шума после детектирования.
В. Управляемый режим с пространственным расширением
Пространственное расширение может также выполняться в комбинации с управляемым режимом. В этом случае передающий объект сначала выполняет пространственную обработку вектора относительно пространственного расширения, а затем выполняет пространственную обработку над результирующими расширенными символами для управляемого режима. Для пространственного расширения передающий объект использует различные управляющие матрицы для псевдослучайно управляемой части блока PDU для каждого поддиапазона k. Желательно использовать по возможности больше различных управляемых матриц как по поддиапазонам, так и по периодам символов, чтобы достичь более высокой степени пространственного расширения. Например, различные наборы управляющих матриц  можно использовать для каждого периода символа для блока PDU. Как минимум, один набор управляющих матриц используется для преамбулы, а другой набор управляющих матриц используется для остальной части PDU, причем один другой набор управляющих матриц может включать в себя единичные матрицы.
можно использовать для каждого периода символа для блока PDU. Как минимум, один набор управляющих матриц используется для преамбулы, а другой набор управляющих матриц используется для остальной части PDU, причем один другой набор управляющих матриц может включать в себя единичные матрицы.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

где  - NTxNT-матрица псевдослучайного управления для поддиапазона k в периоде n символа. Как показано в уравнении (18), передающий объект сначала выполняет пространственную обработку для управляемого режима с использованием управляющей матрицы , после чего выполняет пространственную обработку для управляемого режима с использованием управляющей матрицы
- NTxNT-матрица псевдослучайного управления для поддиапазона k в периоде n символа. Как показано в уравнении (18), передающий объект сначала выполняет пространственную обработку для управляемого режима с использованием управляющей матрицы , после чего выполняет пространственную обработку для управляемого режима с использованием управляющей матрицы  , полученной из матрицы
, полученной из матрицы  отклика MIMO-канала. Расширенные символы (вместо символов данных) передаются таким образом на собственных модах MIMO-канала.
отклика MIMO-канала. Расширенные символы (вместо символов данных) передаются таким образом на собственных модах MIMO-канала.
Принятые символы в принимающем объекте могут быть выражены следующим образом:

Принимающий объект выполняет пространственную обработку для управляемого режима и пространственное сжатие следующим образом:

Как показано в уравнении (20), принимающий объект может восстановить переданные символы данных путем выполнения сначала пространственной обработки приемника для управляемого режима с последующим пространственным сжатием с использованием псевдослучайной управляющей матрицы . Для управляемого режима с пространственным расширением действующий MIMO-канал, воспринимаемый символами данных для каждого поддиапазона, включает в себя обе матрицы  и
и  , используемые передающим объектом.
, используемые передающим объектом.
С. PRTS-режим для разнесения при передаче
В случае PRTS-режима для MIMO, передающий объект использует матрицы псевдослучайного управления для пространственной обработки. Эти управляющие матрицы выводятся таким образом, чтобы иметь некоторые желательные свойства, как описано ниже.
Для реализации разнесения при передаче в PRTS-режиме передающий объект использует разные управляющие матрицы по поддиапазонам, но одну и ту же управляющую матрицу для псевдослучайно управляемой части блока PDU для каждого поддиапазона k. Желательно использовать по возможности больше различных управляемых матриц по поддиапазонам, чтобы достичь более высокой степени пространственного расширения.
Передающий объект выполняет пространственную обработку для каждого поддиапазона следующим образом:

где  - NTxNT-матрица псевдослучайного управления для поддиапазона k в периоде n символа и
- NTxNT-матрица псевдослучайного управления для поддиапазона k в периоде n символа и
 - NTx1-вектор с NT символами передачи, которые должны передаваться от
- NTx1-вектор с NT символами передачи, которые должны передаваться от
NT передающих антенн в поддиапазоне k в периоде n символа.
Один набор управляющих матриц  можно использовать для всех символов OFDM в блоке PDU.
можно использовать для всех символов OFDM в блоке PDU.
Принятые символы в принимающем объекте могут быть выражены следующим образом:

где  - вектор принятых символов для PRTS-режима.
- вектор принятых символов для PRTS-режима.
 - NTxNT-матрица отклика действующего MIMO-канала для поддиапазона k в периоде n символа, которая определяется следующим образом:
- NTxNT-матрица отклика действующего MIMO-канала для поддиапазона k в периоде n символа, которая определяется следующим образом:

Пространственная обработка с псевдослучайной управляющей матрицей
приводит к получению символов данных в  , которым соответствует отклик действующего MIMO-канала, который включает в себя действительный отклик
, которым соответствует отклик действующего MIMO-канала, который включает в себя действительный отклик  канала и управляющую матрицу . Принимающий объект может оценить отклик действующего MIMO-канала, например, на основе символов пилот-сигнала, принимаемых от передающего объекта. Принимающий объект может затем выполнить пространственную обработку над принятыми символами в с использованием оценки
канала и управляющую матрицу . Принимающий объект может оценить отклик действующего MIMO-канала, например, на основе символов пилот-сигнала, принимаемых от передающего объекта. Принимающий объект может затем выполнить пространственную обработку над принятыми символами в с использованием оценки  отклика действующего MIMO-канала для получения продетектированных символов
отклика действующего MIMO-канала для получения продетектированных символов  . Оценка отклика действующего MIMO-канала для каждого поддиапазона k постоянна для блока PDU, поскольку (1) действительный отклик канала предполагается постоянным для блока PDU и (2) одна и та же управляющая матрица используется для блока PDU.
. Оценка отклика действующего MIMO-канала для каждого поддиапазона k постоянна для блока PDU, поскольку (1) действительный отклик канала предполагается постоянным для блока PDU и (2) одна и та же управляющая матрица используется для блока PDU.
Принимающий объект может вывести продетектированные символы с использованием различных методов обработки в приемнике, включая (1) метод инверсии корреляционной матрицы канала (CCMI), который также упоминается как метод приведения к нулю, и (2) метод минимальной среднеквадратичной ошибки (MMSE). В Таблице 1 приведены сведения о пространственной обработке в принимающем объекте для методов CCMI и MMSE. В Таблице 1  - матрица пространственной фильтрации для метода CCMI,
- матрица пространственной фильтрации для метода CCMI,  - матрица пространственной фильтрации для метода MMSE,
- матрица пространственной фильтрации для метода MMSE,  - диагональная матрица для метода MMSE (которая содержит диагональные элементы
).
- диагональная матрица для метода MMSE (которая содержит диагональные элементы
).




Как показано в Таблице 1, для разнесения при передаче, матрицы пространственной фильтрации и для каждого поддиапазона k постоянны для блока PDU, поскольку оценка действующего MIMO-канала постоянна для блока PDU. Для разнесения при передаче принимающему объекту не требуется знать управляющую матрицу, используемую для каждого поддиапазона. Принимающий объект может, тем не менее, извлекать выгоду из разнесения при передаче, поскольку различные управляющие матрицы используются по поддиапазонам, и различные действующие MIMO-каналы формируются для этих поддиапазонов.
D. PRTS-режим для пространственного расширения
Для пространственного расширения в PRTS-режиме передающий объект использует различные управляющие матрицы по псевдослучайно управляемой части блока PDU для каждого поддиапазона k. Матрицы псевдослучайного управления для пространственного расширения могут быть выбраны, как описано выше для управляемого режима.
Передающий объект выполняет пространственную обработку для каждого поддиапазона каждого периода символа следующим образом:

Принятые символы в принимающем объекте могут быть выражены следующим образом:

Отклик  действующего MIMO-канала для каждого поддиапазона каждого периода символа определяется действительным откликом канала для поддиапазона и управляющей матрицей
действующего MIMO-канала для каждого поддиапазона каждого периода символа определяется действительным откликом канала для поддиапазона и управляющей матрицей  , используемой для этого поддиапазона и периода символа. Отклик действующего MIMO-канала для каждого поддиапазона k изменяется по блоку PDU, поскольку различные управляющие матрицы
, используемой для этого поддиапазона и периода символа. Отклик действующего MIMO-канала для каждого поддиапазона k изменяется по блоку PDU, поскольку различные управляющие матрицы  использованы для блока PDU.
использованы для блока PDU.
Принимающий объект получателя принимает переданные блоки PDU и использует преамбулу для оценивания канала. Для каждого поддиапазона принимающий объект получателя может вывести оценку действительного отклика канала (вместо отклика действующего MIMO-канала) на основе преамбулы. Принимающий объект получателя может затем вывести оценку матрицы  отклика действующего MIMO-канала для каждого поддиапазона каждого периода символа в следующем виде:
отклика действующего MIMO-канала для каждого поддиапазона каждого периода символа в следующем виде:

Управляющая матрица  может изменяться от периода к периоду символов для каждого поддиапазона. Принимающий объект использует оценку
может изменяться от периода к периоду символов для каждого поддиапазона. Принимающий объект использует оценку
 отклика действующего MIMO-канала для каждого поддиапазона каждого периода символа для выполнения пространственной обработки по принятым символам для данного поддиапазона и периода символа, например, с использованием метода CCMI или MMSE. Например, матрица может быть использована для вывода матрицы пространственной фильтрации для метода CCMI или MMSE, как показано в таблице 1, где
отклика действующего MIMO-канала для каждого поддиапазона каждого периода символа для выполнения пространственной обработки по принятым символам для данного поддиапазона и периода символа, например, с использованием метода CCMI или MMSE. Например, матрица может быть использована для вывода матрицы пространственной фильтрации для метода CCMI или MMSE, как показано в таблице 1, где  заменено на
заменено на  Однако поскольку матрица
Однако поскольку матрица  изменяется по блоку PDU, то матрица пространственной фильтрации также изменяется по блоку PDU.
изменяется по блоку PDU, то матрица пространственной фильтрации также изменяется по блоку PDU.
Для пространственного расширения принимающий объект получателя знает управляющую матрицу, используемую передающим объектом для каждого поддиапазона в каждом периоде символа, и может выполнить комплементарное пространственное сжатие для восстановления переданного блока PDU. Пространственное сжатие выполняется с использованием надлежащих управляющих матриц для выведения оценок отклика действующего MIMO-канала, которые затем используются для пространственной обработки. Другие передающие объекты не знают управляющих матриц, и передача PDU представляется для этих объектов случайной. В результате для этих других передающих объектов вероятность восстановления переданного блока PDU мала.
Е. Многорежимная операция
Передающий объект может также передавать данные к принимающему объекту с использованием как PRTS-режима, так и управляемого режима. Передающий объект может использовать PRTS-режим, когда отклик канала не доступен, и переключается в управляемый режим, как только отклик канала становится доступным.
3. Генерация управляющих векторов и матриц
Управляющие вектора и матрицы, используемые для PRTS-режима, могут генерироваться различными способами. Некоторые примерные схемы для генерации этих управляющих векторов/матриц описаны ниже. Управляющие векторы и матрицы могут предварительно вычисляться и сохраняться в передающем объекте и принимающем объекте и затем извлекаться для использования по мере необходимости. Альтернативно, эти управляющие векторы и матрицы могут вычисляться в реальном времени по мере необходимости. В последующем описании предполагается, что набор из L управляющих векторов или матриц сформирован и сохранен для использования в PRTS-режиме.
А. Генерация управляющих векторов
Управляющие векторы, используемые для PRTS-режима, должны иметь следующие свойства для достижения высокой эффективности. Строгое соблюдение этих условий не является необходимым. Во-первых, каждый управляющий вектор должен иметь единичную энергию так, чтобы мощность передачи, используемая для символов данных, не изменялась за счет псевдослучайного управления. Во-вторых, NT элементов каждого управляющего вектора могут быть определены таким образом, чтобы они имели одинаковую величину, так что может быть использована вся передаваемая мощность каждой антенны. В-третьих, различные управляющие векторы должны быть в разумной степени некоррелированными, так что корреляция между двумя управляющими векторами в наборе равна нулю или малому значению. Это условие может быть выражено следующим образом:

где с(i,j) - корреляция между управляющими векторами  и
и  .
.
Набор L управляющих векторов  может генерироваться с использованием различных схем. В первой схеме L управляющих векторов генерируются на основе NT х NT-матриц
может генерироваться с использованием различных схем. В первой схеме L управляющих векторов генерируются на основе NT х NT-матриц  независимых идентично распределенных комплексных гауссовых случайных переменных, каждая из которых имеет нулевое среднее значение и единичную дисперсию. Корреляционная матрица каждой матрицы вычисляется как
независимых идентично распределенных комплексных гауссовых случайных переменных, каждая из которых имеет нулевое среднее значение и единичную дисперсию. Корреляционная матрица каждой матрицы вычисляется как  и разлагается как
и разлагается как  для получения унитарной матрицы
для получения унитарной матрицы  . Каждый столбец матрицы может использоваться как управляющий вектор , если он удовлетворяет критерию низкой корреляции с каждым из управляющих векторов, уже входящих в набор.
. Каждый столбец матрицы может использоваться как управляющий вектор , если он удовлетворяет критерию низкой корреляции с каждым из управляющих векторов, уже входящих в набор.
Во второй схеме L управляющих векторов генерируются путем последовательного поворота начального унитарного управляющего вектора следующим образом:

В третьей схеме L управляющих векторов генерируются таким образом, что элементы этих векторов имеют одинаковые величины, но разные фазы. Для данного управляющего вектора  , который может генерироваться любым способом, нормализованный управляющий вектор
, который может генерироваться любым способом, нормализованный управляющий вектор  может быть сформирован следующим образом:
может быть сформирован следующим образом:

где А - постоянная (например, 
и  - фаза j-го элемента
- фаза j-го элемента  Нормализованный управляющий вектор обеспечивает возможность использования полной передающей мощности для каждой антенны.
Нормализованный управляющий вектор обеспечивает возможность использования полной передающей мощности для каждой антенны.
Другие схемы могут также использоваться для генерации набора из L управляющих векторов, что также входит в объем изобретения.
В. Генерация управляющей матрицы
Управляющие матрицы, используемые для PRTS-режима, должны иметь следующие свойства для достижения высокой эффективности. Строгое соблюдение этих условий не является необходимым. Во-первых, управляющие матрицы должны быть унитарными матрицами и удовлетворять следующему условию:

Уравнение (29) показывает, что каждый столбец  должен иметь единичную энергию, и эрмитово внутреннее произведение любых двух столбцов должно быть равно нулю. Это условие обеспечивает, что NT символов данных, передаваемых одновременно с использованием управляющей матрицы , имеют одинаковую мощность и ортогональны друг другу перед передачей. Во-вторых, корреляция между двумя управляющими матрицами в наборе должна быть равна нулю или малому значению. Это условие может быть выражено следующим образом:
должен иметь единичную энергию, и эрмитово внутреннее произведение любых двух столбцов должно быть равно нулю. Это условие обеспечивает, что NT символов данных, передаваемых одновременно с использованием управляющей матрицы , имеют одинаковую мощность и ортогональны друг другу перед передачей. Во-вторых, корреляция между двумя управляющими матрицами в наборе должна быть равна нулю или малому значению. Это условие может быть выражено следующим образом:

где  - корреляционная матрица между управляющими векторами
- корреляционная матрица между управляющими векторами  и
и  и
и  - матрица всех нулей. L управляющих матриц может генерироваться так, что максимальная энергия корреляционных матриц для всех возможных пар управляющих матриц минимизирована.
- матрица всех нулей. L управляющих матриц может генерироваться так, что максимальная энергия корреляционных матриц для всех возможных пар управляющих матриц минимизирована.
Набор L управляющих матриц  может генерироваться с использованием различных схем. В первой схеме L управляющих матриц генерируются на основе матриц случайных переменных. Сначала генерируется матрица случайных переменных и корреляционная матрица матрицы вычисляется и разлагается для получения унитарной матрицы , как описано выше. Если существует низкая корреляция между матрицей и каждой из ранее сформированных управляющих матриц, то матрица может использоваться как управляющая матрица и добавляется к набору. Процесс повторяется до тех пор, пока не будут сформированы все L управляющих матриц.
может генерироваться с использованием различных схем. В первой схеме L управляющих матриц генерируются на основе матриц случайных переменных. Сначала генерируется матрица случайных переменных и корреляционная матрица матрицы вычисляется и разлагается для получения унитарной матрицы , как описано выше. Если существует низкая корреляция между матрицей и каждой из ранее сформированных управляющих матриц, то матрица может использоваться как управляющая матрица и добавляется к набору. Процесс повторяется до тех пор, пока не будут сформированы все L управляющих матриц.
Во второй схеме L управляющих матриц генерируются путем последовательного поворота начальной унитарной управляющей матрицы  в NT-мерном комплексном пространстве следующим образом:
в NT-мерном комплексном пространстве следующим образом:

где  - диагональная унитарная NT×NT-матрица с элементами, которые являются корнями L-й степени из единицы. Вторая схема описана в работе B.M.Hochwald et al. “Systematic Design of Unitary Space-Time Constellations”, IEEE Transactions on Information Theory, Vol.46, No.6, September 2000.
- диагональная унитарная NT×NT-матрица с элементами, которые являются корнями L-й степени из единицы. Вторая схема описана в работе B.M.Hochwald et al. “Systematic Design of Unitary Space-Time Constellations”, IEEE Transactions on Information Theory, Vol.46, No.6, September 2000.
Другие схемы могут также использоваться для генерации набора из L управляющих матриц, что также входит в объем изобретения. В принципе, управляющие матрицы могут генерироваться псевдослучайным или детерминированным образом.
С. Выбор управляющих векторов/матриц
L управляющих векторов/матриц в наборе могут выбираться для использования различными способами. Управляющий вектор может рассматриваться как вырожденная управляющая матрица, содержащая только один столбец. Таким образом, в том смысле, как использовано в настоящем описании, матрица может содержать один или более столбцов.
В одном варианте осуществления управляющие матрицы выбираются из набора L управляющих матриц детерминированным образом. Например, L управляющих матриц могут проходиться циклическим способом и выбираться в последовательном порядке, начиная с , затем  и т.д. и затем
и т.д. и затем  . В другом варианте осуществления управляющие матрицы выбираются из набора псевдослучайным образом. Например, управляющая матрица для использования в каждом поддиапазоне может выбираться на основе функции f(k), которая псевдослучайным образом выбирает одну из L управляющих матриц или
. В другом варианте осуществления управляющие матрицы выбираются из набора псевдослучайным образом. Например, управляющая матрица для использования в каждом поддиапазоне может выбираться на основе функции f(k), которая псевдослучайным образом выбирает одну из L управляющих матриц или  . В другом варианте осуществления управляющие матрицы выбираются из набора путем перестановок. Например, L управляющих матриц могут проходиться циклическим способом и выбираться для использования в последовательном порядке. Однако начальная управляющая матрица в каждом цикле может выбираться псевдослучайным образом вместо использования всегда первой управляющей матрицы . L управляющих матриц могут также выбираться другими способами.
. В другом варианте осуществления управляющие матрицы выбираются из набора путем перестановок. Например, L управляющих матриц могут проходиться циклическим способом и выбираться для использования в последовательном порядке. Однако начальная управляющая матрица в каждом цикле может выбираться псевдослучайным образом вместо использования всегда первой управляющей матрицы . L управляющих матриц могут также выбираться другими способами.
Выбор управляющих матриц может также зависеть от числа управляющих матриц (L) в наборе и числа поддиапазонов (NM) для применения псевдослучайного управления при передаче, например, NM=ND+NP. В общем случае L может быть больше или равно, или меньше, чем NM. Если L=NM, то отличающаяся управляющая матрица может быть выбрана для каждого из NM поддиапазонов. Если L<NM, то управляющие матрицы повторно используются для каждого периода символа. Если L>NM, то поднабор управляющих матриц используется для каждого периода символа. Для всех случаев NM управляющих матриц для NM поддиапазонов могут быть выбраны детерминированным, псевдослучайным способом или путем перестановок, как описано выше.
Для разнесения при передаче NM управляющих матриц выбираются для NM поддиапазонов для каждого блока PDU. Для пространственного расширения NM управляющих матриц могут выбираться для NM поддиапазонов для каждого периода символа блока PDU. Различный набор NM управляющих матриц может выбираться для каждого периода символа, где набор может включать в себя различные перестановки L управляющих матриц.
Для пространственного расширения для схем MIMO и MISO только передающий и принимающий объекты знают псевдослучайные управляющие матрицы, используемые для пространственной обработки. Это может быть реализовано разными способами. В одном варианте осуществления управляющие матрицы выбираются псевдослучайным образом из набора L управляющих матриц на основе алгоритма, инициируемого секретной информацией (например, ключом, начальным значением, идентификатором или последовательным номером), обмен которой производится между передающим и принимающим объектами (например, через сигнализацию по радиоканалу или некоторыми другими средствами). Это приводит к набору управляющих матриц, перестановки которых известны только передающему и принимающему объектам. В другом варианте осуществления передающий и принимающий объекты модифицируют общие управляющие матрицы, известные всем объектам, с использованием уникальной матрицы  , которая известна только двум объектам. Эта операция может быть выражена как
, которая известна только двум объектам. Эта операция может быть выражена как  или
или  . Модифицированные управляющие матрицы затем используются для пространственной обработки. В другом варианте осуществления передающий и принимающий объекты выполняют перестановки столбцов общих управляющих матриц способом, который известен только этим двум объектам. В другом варианте осуществления передающий и принимающий объекты генерируют управляющие матрицы, как им требуется, на основе некоторой секретной информации, известной только этим двум объектам. Псевдослучайные управляющие матрицы, используемые для пространственного расширения, могут генерироваться различными другими способами, которые также входят в объем изобретения.
. Модифицированные управляющие матрицы затем используются для пространственной обработки. В другом варианте осуществления передающий и принимающий объекты выполняют перестановки столбцов общих управляющих матриц способом, который известен только этим двум объектам. В другом варианте осуществления передающий и принимающий объекты генерируют управляющие матрицы, как им требуется, на основе некоторой секретной информации, известной только этим двум объектам. Псевдослучайные управляющие матрицы, используемые для пространственного расширения, могут генерироваться различными другими способами, которые также входят в объем изобретения.
4.IEEE 802.11
Описанные способы могут использоваться для различных OFDM-систем, например для систем, которые реализуют стандарты IEEE 802.11а и 802.11g. OFDM-структура, соответствующая стандартам 802.11а/g, подразделяет всю ширину полосы системы на 64 ортогональных поддиапазона (или NF=64), которым присвоены индексы от -32 до +31. Из этих 64 поддиапазонов 48 поддиапазонов (с индексами ±{1,…,6,6,…,20,22,…, 26}) используются для передачи данных, четыре поддиапазона (с индексами ±{7,21}) используются для передачи пилот-сигнала, а поддиапазон постоянной составляющей (с индексом 0) и остальные поддиапазоны не используются и служат в качестве защитных поддиапазонов. Для стандартов IEEE 802.11а/g каждый OFDM-символ состоит из 64-элементного преобразованного символа и 16-элементного циклического префикса. Стандарты IEEE 802.11а/g используют системную ширину полосы 20 МГц. Таким образом, каждая элементарная посылка имеет длительность 50 нс, и каждый OFDM-символ имеет длительность 4,0 мкс, что является одним периодом OFDM-символа для данной системы.
Эта OFDM-структура описана в документе, представляющем стандарт IEEE 802.11а: “Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High -speed Physical Layer in the 5 GHz Band”, September 1999, который является общедоступным документом.
На фиг.6А показан формат 600 блока PDU, определенный в стандарте IEEE 802.11. Формат 600 поддерживает как управляемый режим, так и PRTS-режим (как для разнесения при передаче, так и для пространственного расширения) для MISO-передачи. На физическом (PHY) уровне в стеке протоколов стандарта IEEE 802.11 данные обрабатываются как блоки данных услуги PHY-подуровня (PSDU). Каждый блок PSDU 630 кодируется и модулируется отдельно на основе схемы кодирования и модуляции, выбранной для данного блока PDSU. Каждый блок PSDU 630 имеет, кроме того, заголовок PLCP 610, который включает в себя 6 полей. Поле 612 скорости указывает скорость для блока PSDU. Резервное поле 614 содержит один зарезервированный бит. Поле 616 длины указывает длину блока PSDU в байтах. Поле 618 проверки четности содержит 1 бит проверки четности для трех предыдущих полей. Концевое поле 620 содержит шесть нулей, используемых для очистки кодера. Сервисное поле 622 содержит семь нулевых битов, используемых для инициализации скремблера для блока PSDU, и девять зарезервированных битов. Концевое поле 632, присоединенное к концу блока PSDU и содержащее шесть нулей, служит для очистки кодера. Поле 634 заполнения переменной длины содержит достаточное число заполняющих битов для согласования блока PSDU 630 с целым числом OFDM-символов.
Каждый блок PSDU 630 и связанные с ним поля передаются в одном PHY-блоке данных протокола (PPDU) 640, который содержит три сегмента. Сегмент 642 преамбулы имеет длительность четырех периодов OFDM-символов и содержит десять коротких обучающих символов 642а и два длинных обучающих символа 642b, которые используются принимающим объектом для АРУ, захвата синхронизации, грубого и точного определения частоты, оценивания канала и для других целей. Десять коротких обучающих символов генерируются с 12 конкретными символами пилот-сигнала в 12 указанных поддиапазонах и охватывают два периода OFDM-символа. Два длинных обучающих символа генерируются с 52 конкретными символами пилот-сигнала в 52 указанных поддиапазонах и также охватывают два периода OFDM-символа. Сегмент 644 сигнализации содержит один OFDM-символ для первых пяти полей заголовка. Сегмент 648 данных содержит переменное число OFDM-символов для сервисного поля заголовка, блок PSDU и последующие концевое поле и поле заполнения. Блок PPDU 640 может также определяться как пакет или с использованием некоторой другой терминологии.
На фиг.6В показан примерный формат 602 блока PDU, который поддерживает как управляемый режим, так и PRTS-режим для MISO- и MIMO-передач. Блок PPDU 650 для этого формата содержит сегмент 652 преамбулы, сегмент 654 сигнализации, сегмент 656 MIMO-пилот-сигнала и сегмент 658 данных. Сегмент 652 преамбулы содержит десять коротких обучающих символа 652а и два длинных обучающих символов 652b, подобно сегменту 642 преамбулы. Сегмент 654 сигнализации содержит сигнализацию для блока PPDU 650 и может быть определен так, как представлено в Таблице 2.
(бит)
ССН
MIMO-пилот-сигнала
(например, 2 или 4 периода
OFDM-символа)
В Таблице 2 показан примерный формат для сегмента 654 сигнализации для четырех передающих антенн (NT=4). До четырех пространственных каналов может быть использовано для передачи данных, в зависимости от количества приемных антенн. Скорость для каждого пространственного канала указана полем вектора скоростей. Принимающий объект может определить и передать назад информацию о максимальных скоростях, поддерживаемых пространственными каналами. Передающий объект может затем выбрать скорости для передачи данных на основе (например, как меньшие или равные) этих максимальных скоростей. Другие форматы с отличающимися полями также могут использоваться для сегмента 654 сигнализации.
Сегмент 656 MIMO-пилот-сигнала содержит пилот-сигнал, используемый принимающим объектом для оценивания MIMO-канала. MIMO-пилот-сигнал представляет собой пилот-сигнал, передаваемый от всех NT передающих антенн (1) в «открытом» режиме без какой-либо пространственной обработки, (2) с псевдослучайным управлением, как показано в уравнении (21) или (23) и (3) на собственных модах MIMO-канала, как показано в уравнении (18). Передаваемые символы для каждой передающей антенны для MIMO-пилот-сигнала дополнительно перемножаются (или накрываются) с NT-элементной ортогональной последовательностью (например, 4-элементным кодом Уолша), назначенным для данной передающей антенны. Сегмент 658 данных содержит переменное число OFDM-символов для данных, заполняющих битов и концевых битов, аналогично сегменту 648 данных.
Псевдослучайное управление передачей может выполняться различными способами для форматов 600 и 602. В варианте осуществления PRTS-режима псевдослучайное управление передачей применяется ко всему блоку PDU. В другом варианте осуществления PRTS-режима псевдослучайное управление передачей применяется к части блока PDU. Например, псевдослучайное управление передачей может применяться ко всему блоку PDU за исключением десяти коротких обучающих символов для форматов 600 и 602. Псевдослучайное управление передачей десяти коротких обучающих символов может отрицательно повлиять на обнаружение сигнала, АРУ, захват синхронизации, грубое определение частоты и поэтому оно не применяется к этим символам в данном случае. Для разнесения при передаче для каждого поддиапазона один и тот же вектор или матрица псевдослучайного управления используется для псевдослучайно управляемой части блока PDU. Для пространственного расширения для каждого поддиапазона различные векторы или матрицы псевдослучайного управления могут использоваться для псевдослучайно управляемой части блока PDU. Как минимум, различные векторы или матрицы псевдослучайного управления используются для части преамбулы/пилот-сигнала, используемой для оценивания канала (например, для двух длинных обучающих символов) и сегмента данных блока PDU. Для формата 600 различные управляющие векторы могут использоваться для двух длинных обучающих символов в сегменте преамбулы и для сегмента данных блока 640 PPDU, причем управляющий вектор для одного сегмента может состоять из всех единиц. Для формата 602 различные управляющие матрицы могут использоваться для сегмента MIMO-пилот-сигнала и для сегмента данных блока 650 PPDU, причем управляющая матрица может представлять собой единичную матрицу.
Принимающий объект обычно обрабатывает каждый блок PPDU по отдельности. Принимающий объект может использовать (1) короткие обучающие символы для АРУ, выбора при разнесении, захвата синхронизации, грубого определения частоты и (2) длинные обучающие символы для точного определения частоты. Принимающий объект может использовать длинные обучающие символы для оценивания MISO-канала и MIMO-пилот-сигнал для оценивания MIMO-канала. Принимающий объект может выводить оценки отклика действующего канала непосредственно или косвенным образом из преамбулы или MIMO-пилот-сигнала и использовать оценки канала для детектирования или пространственной обработки, как описано выше.
5. Система
На фиг.7 представлена блок-схема передающего объекта 710 с множеством антенн, принимающий объект 750х с одной антенной и принимающий объект 750у с множеством антенн в системе 100. Передающий объект 710 может представлять собой пункт доступа или пользовательский терминал с множеством антенн. Каждый принимающий объект 750 может также представлять собой пункт доступа или пользовательский терминал.
В передающем объекте 710 процессор 720 данных передачи (TX) обрабатывает (например, кодирует, выполняет перемежение и отображение на символы) каждый пакет данных для получения соответствующего блока символов данных. Процессор 730 TX-пространственной обработки получает и демультиплексирует символы пилот-сигнала и данных в надлежащие поддиапазоны, выполняет пространственную обработку соответственно управляемому режиму и/или PRTS-режиму и выдает NT потоков символов передачи на NT передающих блоков от 732а до 732t. Каждый передающий блок 732 обрабатывает свой поток символов передачи и генерирует модулированный сигнал. Передающие блоки от 732а до 732t выдают NT модулированных сигналов для передачи через NT антенн от 734а до 734t соответственно.
В приемном объекте 750х с одной антенной антенна 752х принимает NT переданных сигналов и выдает принятый сигнал на приемный блок 754х. Приемный блок 754х выполняет обработку, являющуюся комплементарной той обработке, которая выполнялась в передающих блоках 732, и выдает (1) принятые символы данных на детектор 760х и (2) принятые символы пилот-сигналов на блок 784х оценивания канала в контроллере 780х. Блок 784х оценивания канала выводит оценки отклика канала для действующих SISO-каналов между передающим объектом 710 и принимающим объектом 750х для всех поддиапазонов данных. Детектор 760х выполняет детектирование по принятым символам данных для каждого поддиапазона на основе оценки отклика действующего SISO-канала для данного поддиапазона и выдает поток продетектированных символов для всех поддиапазонов. Процессор 770 данных приема (RX) затем выполняет обработку (обращенное отображение символов, обращенное перемежение и декодирование) продетектированных символов и выдает декодированные данные для каждого пакета данных.
В приемном объекте 750у с множеством антенн NR антенн от 752а до 752r принимают NT переданных сигналов и каждая антенна 752 выдает принятый сигнал на соответствующий приемный блок 754. Каждый приемный блок 754 обрабатывает соответствующий принятый сигнал и выдает (1) принятые символы данных на процессор 760у RX-пространственной обработки и (2) принятые символы пилот-сигналов на блок 784у оценивания канала в контроллере 780у. Блок 784у оценивания канала выводит оценки отклика канала для фактических или действующих MIМO-каналов между передающим объектом 710 и принимающим объектом 750у для всех поддиапазонов данных. Контроллер 780у выводит матрицы пространственной фильтрации на основе оценок отклика MIMO-канала и управляющие матрицы в соответствии, например, с методом CCMI или MMSE. Процессор 760у RX-пространственной обработки выполняет пространственную обработку для принятых символов данных для каждого поддиапазона с использованием матрицы пространственной фильтрации, выведенной для данного поддиапазона, и выдает продетектированные символы для этого поддиапазона. Процессор 770у RX-данных затем обрабатывает продетектированные символы для всех поддиапазонов и выдает декодированные данные для каждого пакета данных.
Контроллеры 740, 780х и 780у управляют работой блоков обработки в передающем объекте 710 и принимающих объектах 750х и 750у соответственно. Блоки памяти 742, 782х, 782у сохраняют данные и/или программные коды, используемые контроллерами 740, 780х и 780у, соответственно. Например, эти блоки памяти могут сохранять набор L векторов (SV) или матриц (SM) псевдослучайного управления.
Фиг.8 показывает блок-схему варианта выполнения блоков обработки в передающем объекте 710х. В процессоре 720 ТХ-данных кодер 822 принимает и кодирует каждый пакет данных отдельно на основе схемы кодирования и выдает биты кода. Кодирование повышает надежность передачи данных. Схема кодирования может включать в себя кодирование с проверкой циклическим избыточным кодом (CRC), сверточное кодирование, турбокодирование с проверкой четности низкой плотности (LDPC), блочное кодирование и другие схемы кодирования или их комбинации. В PRTS-режиме отношение сигнал/шум (ОСШ) может изменяться на длительности пакета данных, даже если беспроводный канал является равномерным по всем поддиапазонам и статическим по пакету данных. Достаточно производительные схемы кодирования могут использоваться для противодействия изменению ОСШ по пакету данных, так что эффективность кодирования пропорциональна усредненному ОСШ по пакету данных. Блок 824 перемежения перемежает или переупорядочивает биты кода для каждого пакета данных на основе схемы перемежения для реализации разнесения по частоте, времени и/или пространству. Блок 826 отображения символов отображает перемеженные биты для каждого пакета данных на основе используемой схемы модуляции (например, QPSR (квадратурной фазовой манипуляции), M-PSK (М-уровневой фазовой манипуляции) или M-QAM (М-уровневой квадратурной амплитудной модуляции) и выдает блок символов данных для пакета данных. Схемы кодирования и модуляции, используемые для каждого пакета данных, определяются скоростью, выбранной для этого пакета.
В процессоре 730 ТХ-пространственной обработки демультиплексор 832 принимает и демультиплексирует блок символов данных для каждого пакета данных на ND последовательностей символов данных для ND поддиапазонов данных. Для каждого поддиапазона данных мультиплексор 834 принимает символы пилот-сигнала и данных для поддиапазона, обеспечивает символы пилот-сигнала для частей преамбулы и MIMO-пилот-сигнала и обеспечивает символы данных для частей сигнализации и данных. Для каждого пакета данных ND мультиплексоров от 834а до 834nd выдают ND последовательностей символов пилот-сигнала и данных для ND поддиапазонов данных на ND процессоров ТХ-пространственной обработки поддиапазонов от 840а до 840nd. Каждый процессор 840 пространственной обработки выполняет пространственную обработку для управляемого или PRTS-режима для соответствующего поддиапазона данных. Для MISO-передачи каждый процессор 840 пространственной обработки выполняет пространственную обработку своей последовательности символов пилот-сигнала и данных с использованием одного или более управляющих векторов, выбранных для поддиапазона, и выдает NT последовательностей символов передачи для NT передающих антенн на NT мультиплексоров от 842а до 842t. Для MIМO-передачи каждый процессор 840 пространственной обработки демультиплексирует свою последовательность символов пилот-сигнала и данных на NS подпоследовательностей для NS пространственных каналов, выполняет пространственную обработку для NS подпоследовательностей символов пилот-сигнала и данных с использованием одной или более управляющих матриц, выбранных для поддиапазона, и выдает NT последовательностей символов передачи на NT мультиплексоров от 842а до 842t. Каждый мультиплексор 842 выдает последовательность символов передачи для всех поддиапазонов на соответствующий передающий блок 732. Каждый передающий блок 732 содержит (1) OFDM-модулятор 852, который выполняет OFDM-модуляцию над соответствующим потоком символов передачи, и (2) РЧ ТХ-блок 854, который обрабатывает (например, преобразует в аналоговую форму, фильтрует, усиливает и преобразует с повышением частоты) поток OFDM-символов с OFDM-модулятора 852 для генерации модулированного сигнала.
Фиг.9А показывает вариант осуществления блока обработки в приемном объекте 750х с одной антенной. Приемный блок 754х содержит (1) РЧ RX-блок 912, который преобразует и оцифровывает принятый сигнал с антенны 752x и выдает поток выборок, и (2) OFDM-демодулятор 914, который выполняет OFDM-демодуляцию над выборками, выдает принятые символы данных в детектор 760х и выдает принятые символы пилот-сигнала в блок 784х оценивания канала. Блок 784х оценивания канала выводит оценки отклика канала для действительных SISO-каналов на основе принятых символов пилот-сигнала и, возможно, управляющих векторов.
В детекторе 760х демультиплексор демультиплексирует принятые символы данных для каждого пакета данных на ND принятых последовательностей символов данных для ND поддиапазонов данных и выдает ND последовательностей на ND детекторов поддиапазонов от 924а до 924nd. Каждый детектор 924 поддиапазона выполняет детектирование принятых символов данных для своего поддиапазона с использованием оценки отклика канала для действительных SISO-каналов для данного поддиапазона и обеспечивает продетектированные символы. Мультиплексор 926 мультиплексирует продетектированные символы для всех поддиапазонов данных и выдает блок продетектированных символов для каждого пакета данных на процессор 770х RX-данных. В процессоре 770х RX-данных блок 932 обращенного отображения символов выполняет обращенное отображение продетектированных символов для каждого пакета данных согласно схеме модуляции, использованной для этого пакета. Обращенный перемежитель 934 выполняет обращенное перемежение демодулированных данных способом, комплементарным перемежению, выполненному над этим пакетом данных. Декодер 936 декодирует обращенно перемеженные данные способом, комплементарным кодированию, выполненному над этим пакетом данных. Например, турбодекодер или декодер Витерби могут использоваться для декодера 936, если турбокодирование или сверточное кодирование выполнялось соответственно передающим объектом 710.
Фиг.9В показывает вариант осуществления блока обработки в приемном объекте 750у с множеством антенн. Приемные блоки от 754а до 754r преобразуют, оцифровывают и выполняют OFDM-демодуляцию NR принятых сигналов, выдают принятые символы данных в процессор 760у RX-пространственной обработки и выдают принятые символы пилот-сигнала в блок 784у оценивания канала. Блок 784у оценивания канала выводит оценки отклика канала для MIMO-каналов на основе принятых символов пилот-сигнала. Контроллер 780у выводит матрицы пространственной фильтрации на основе оценки отклика MIMO-канала и управляющих матриц. В процессоре 760у RX-пространственной обработки NR демультиплексоров от 942а до 942r получают принятые символы данных с NR приемных блоков от 754а до 754r. Каждый демультиплексор 942 демультиплексирует принятые символы данных для каждого пакета данных на ND принятых последовательностей символов данных для ND поддиапазонов данных и выдает ND последовательностей на ND процессоров от 944а до 944nd RX-пространственной обработки поддиапазонов. Каждый процессор 944 пространственной обработки выполняет пространственную обработку в приемнике над принятыми символами данных для своего поддиапазона с использованием матрицы пространственной фильтрации для данного поддиапазона и обеспечивает продетектированные символы. Мультиплексор 946 мультиплексирует продетектированные символы для всех поддиапазонов данных и выдает блок продетектированных символов для каждого пакета данных на процессор 770у RX-данных, который может быть выполнен аналогично процессору 770х RX-данных, показанному на фиг.9А.
Описанные способы передачи данных могут быть реализованы различными средствами. Эти способы могут быть реализованы в виде аппаратных средств, программного обеспечения или их комбинации. Для реализации с помощью аппаратных средств блоки обработки, используемые для выполнения или поддержки способов передачи данных в передающем и принимающем объектах, могут быть реализованы на одной или более специализированных интегральных схемах (ASIC) с помощью цифрового процессора сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, предназначенных для выполнения описанных функций, или комбинации указанных средств.
Для программной реализации способы передачи данных могут быть реализованы модулями (например, процедурами, функциями и т.д.), которые выполняют описанные функции. Коды программного обеспечения могут храниться в блоке памяти (например, в блоках 742, 782х и 782у на фиг.7) и исполняться процессором (например, контроллерами 740, 780х и 780у). Блок памяти может быть реализован в процессоре или быть внешним относительно процессора, и в этом случае он может коммуникативно связываться с процессором различными средствами, известными в технике.
Заголовки включены в описание для ссылки и для облегчения нахождения соответствующих разделов. Эти заголовки не предназначены для ограничения объема принципов, описанных под ними, и указанные принципы могут применяться и в других разделах описания.
Настоящее описание раскрытых вариантов осуществления предусмотрено для обеспечения возможности любому специалисту в данной области техники реализовать и использовать настоящее изобретение. Различные модификации этих вариантов осуществления должны быть очевидны для специалистов в данной области техники, и общие определенные выше принципы могут быть применены к другим вариантам осуществления без отклонения от сущности и объема изобретения. Таким образом, настоящее изобретение не ограничено представленными вариантами осуществления, а должно соответствовать самому широкому объему, совместимому с раскрытыми принципами и новыми признаками.
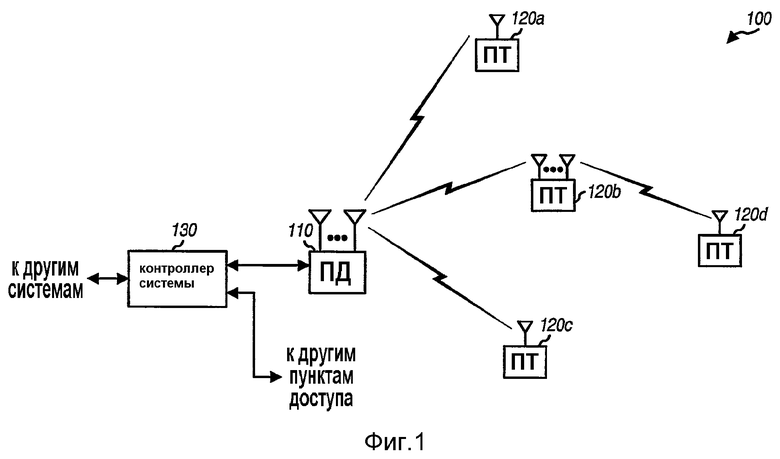
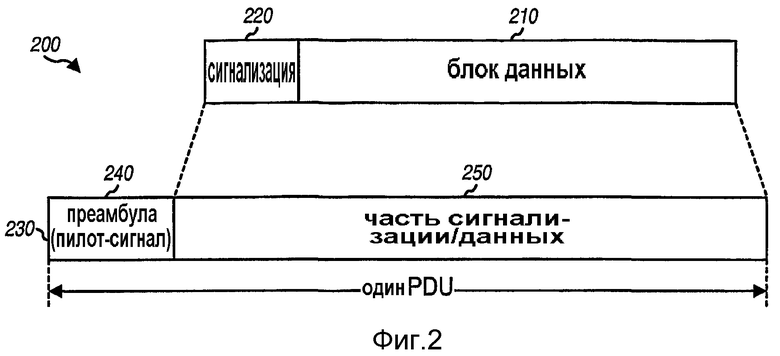
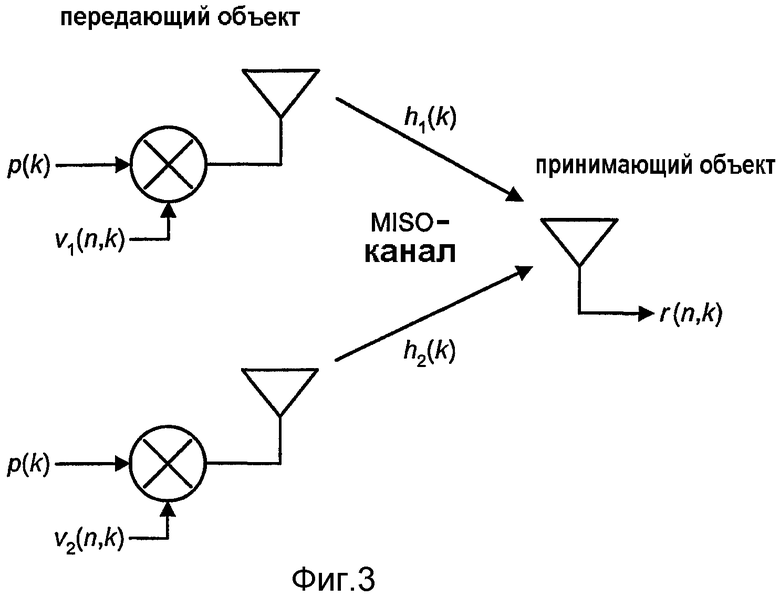
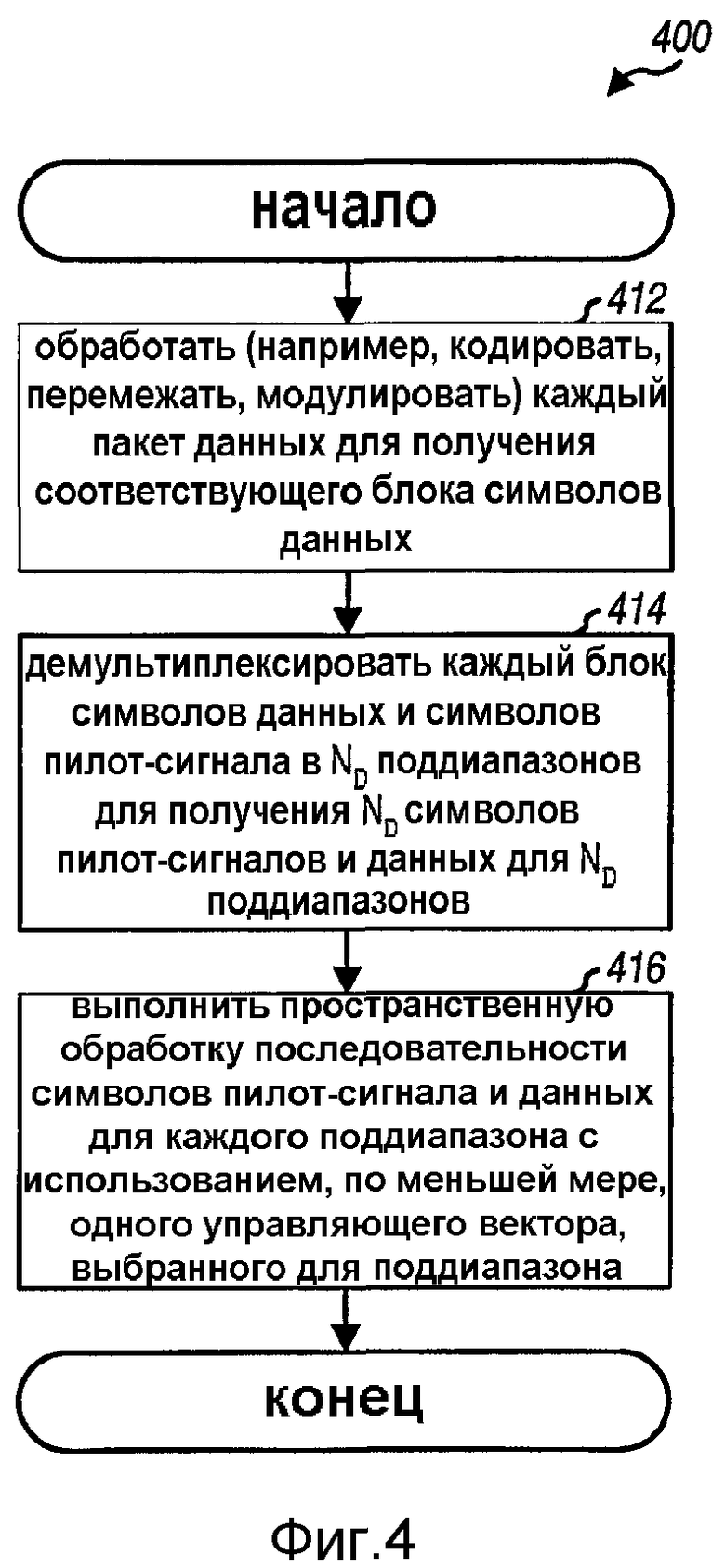
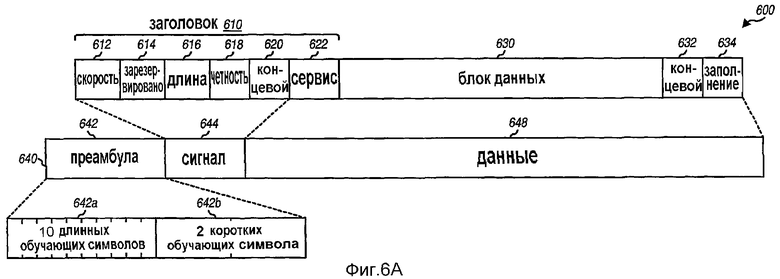

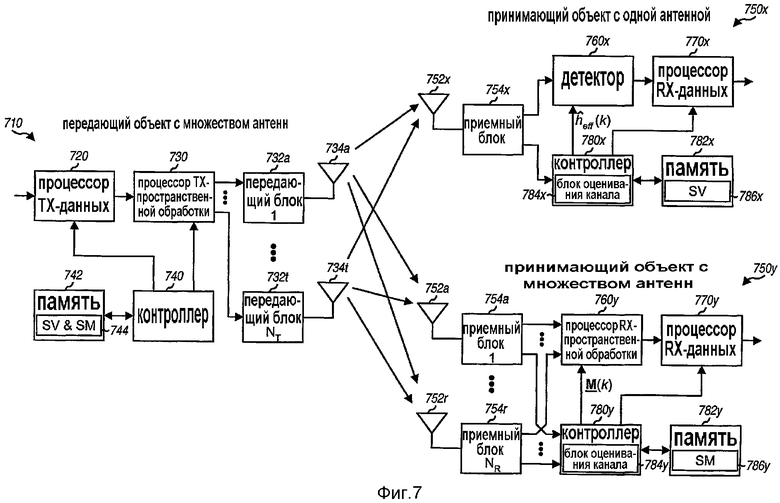
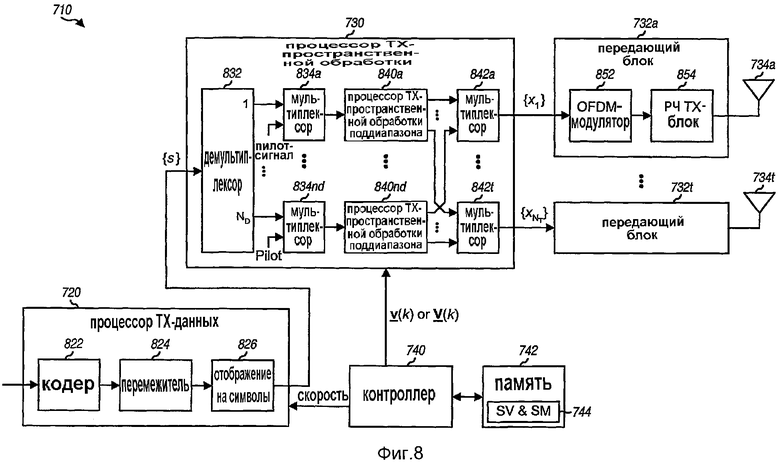
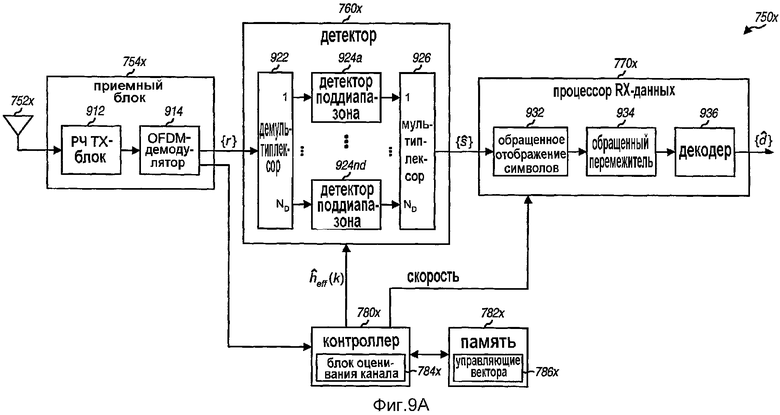
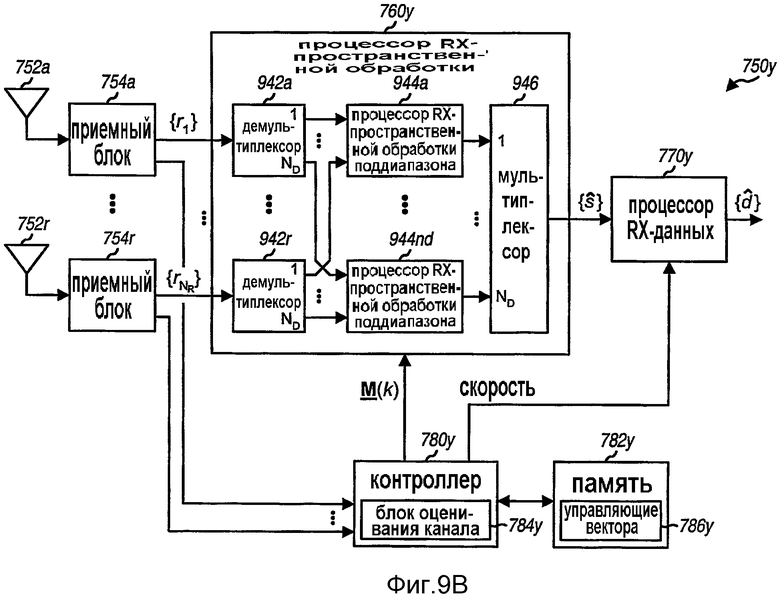
Изобретение относится к системам связи, а именно к способам передачи данных в системе связи с множеством антенн, которая использует мультиплексирование с ортогональным частотным разнесением (OFDM). Техническим результатом является обеспечение высокой степени разнесения. Результат достигается тем, что передающий объект с множеством антенн передает данные к принимающему объекту с множеством антенн, используя управляемый режим для направления передачи данных на принимающий объект или режим псевдослучайного управления (PRTS) для рандомизации эффективных каналов, существующих для передачи данных в поддиапазонах. Режим PRTS может использоваться для реализации разнесения при передаче или пространственного расширения. Для разнесения при передаче передающий объект использует различные векторы псевдослучайного управления по поддиапазонам, используемым для передачи данных, но один и тот же вектор управления по пакету для каждого поддиапазона. Принимающему объекту не требуется иметь сведения о векторах псевдослучайного управления или выполнять какую-либо специальную обработку. Для пространственного расширения передающий объект использует различные векторы псевдослучайного управления по поддиапазонам и различные векторы управления по пакету для каждого поддиапазона. 5 н. и 31 з.п. ф-лы, 11 ил., 2 табл.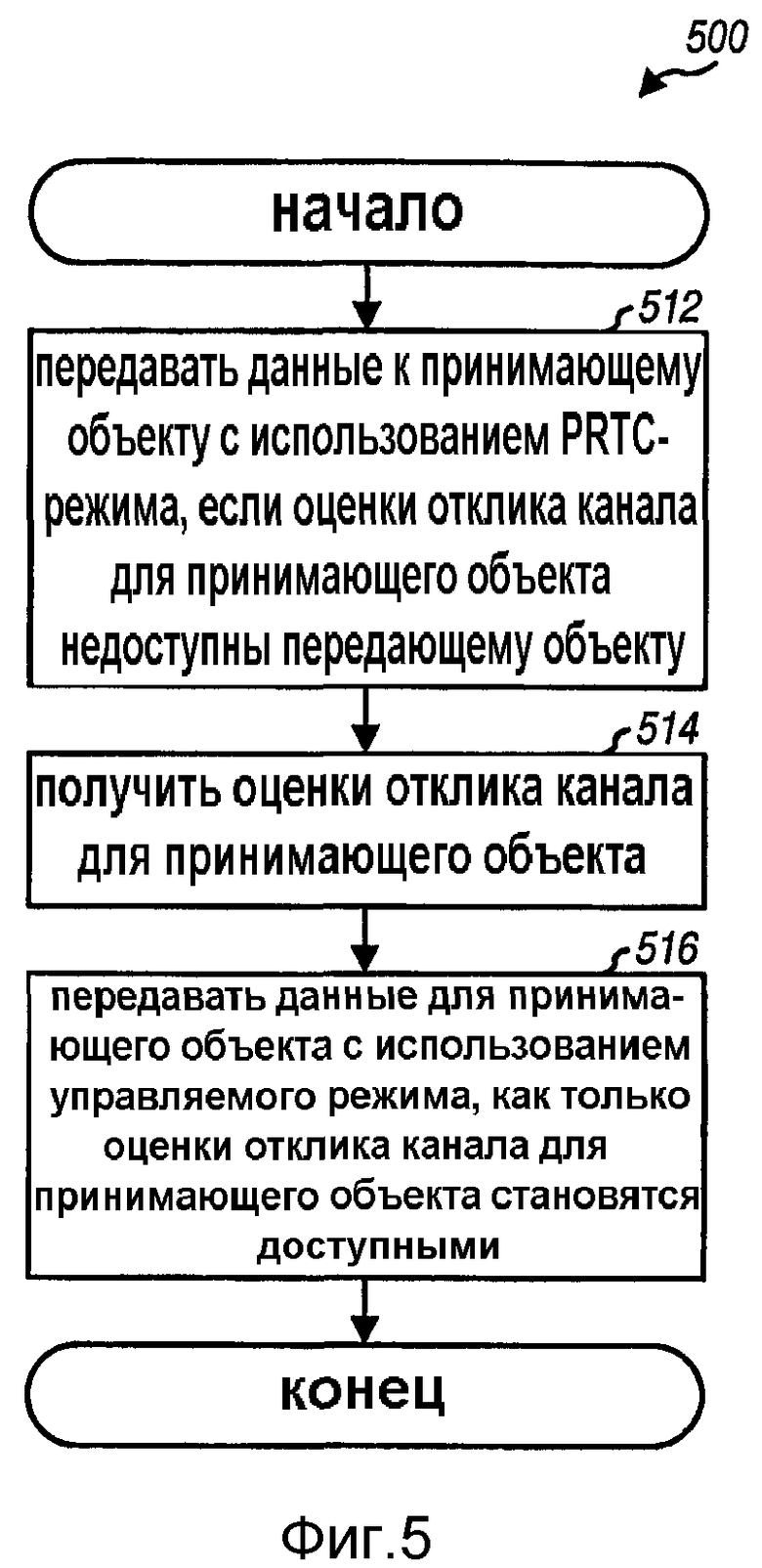
1. Способ передачи данных от передающего объекта к принимающему объекту в беспроводной системе связи с множеством антенн, использующей мультиплексирование с ортогональным частотным разделением (OFDM), содержащий
обработку протокольного блока данных (PDU) для получения блока символов данных;
демультиплексирование символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для PDU, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
выполнение пространственной обработки над, по меньшей мере, одним из символов пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, одного управляющего вектора, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), воспринимаемых во множестве поддиапазонов.
2. Способ по п.1, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатываются с использованием одного управляющего вектора, выбранного для поддиапазона.
3. Способ по п.2, в котором множество различных управляющих векторов используется для множества поддиапазонов.
4. Способ по п.2, в котором один управляющий вектор, используемый для пространственной обработки каждого поддиапазона, не известен принимающему объекту.
5. Способ по п.1, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатываются с использованием, по меньшей мере, двух управляющих векторов, выбранных для поддиапазона.
6. Способ по п.1, в котором один символ пилот-сигнала или данных передается в каждом поддиапазоне в каждом периоде символа, причем символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатываются с использованием отличающегося управляющего вектора для каждого периода символа.
7. Способ по п.1, в котором, по меньшей мере, один управляющий вектор, используемый для пространственной обработки для каждого поддиапазона, известен только передающему объекту и принимающему объекту.
8. Способ по п.1, в котором пространственная обработка с использованием, по меньшей мере, одного управляющего вектора для каждого поддиапазона выполняется только над символами данных.
9. Способ по п.1, в котором символы пилот-сигнала используются для оценивания канала принимающим объектом.
10. Способ по п.1, в котором обработка PDU включает в себя кодирование PDU в соответствии со схемой кодирования для получения кодированных данных, перемежение кодированных данных для получения перемеженных данных и отображение на символы перемеженных данных в соответствии со схемой модуляции для получения блока символов данных.
11. Способ по п.1, дополнительно содержащий выбор, по меньшей мере, одного управляющего вектора для каждого поддиапазона из набора L управляющих векторов, где L - целое число, большее, чем единица.
12. Способ по п.11, в котором L управляющих векторов таковы, что любая пара управляющих векторов из L управляющих векторов имеет низкую корреляцию.
13. Способ по п.6, дополнительно содержащий выбор управляющего вектора для каждого поддиапазона в каждом периоде символа из набора L управляющих векторов, где L - целое число, большее, чем единица.
14. Способ по п.1, в котором каждый управляющий вектор включает в себя Т элементов, имеющих одинаковую величину, но разные фазы, где Т - число передающих антенн в передающем объекте, являющееся целым числом, большим, чем единица.
15. Устройство передачи данных от передающего объекта к принимающему объекту в беспроводной системе связи с множеством антенн, использующей мультиплексирование с ортогональным частотным разделением (OFDM), содержащее
процессор данных, предназначенный для обработки протокольного блока данных (PDU) для получения блока символов данных;
демультиплексор, предназначенный для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для PDU, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
процессор пространственной обработки, предназначенный для выполнения пространственной обработки над, по меньшей мере, одним из символов пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, одного управляющего вектора, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), воспринимаемых во множестве поддиапазонов.
16. Устройство по п.15, в котором процессор пространственной обработки обеспечивает пространственную обработку символов пилот-сигнала и данных для каждого поддиапазона с использованием одного управляющего вектора, выбранного для поддиапазона.
17. Устройство по п.15, в котором процессор пространственной обработки обеспечивает пространственную обработку последовательности символов пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, двух управляющих векторов, выбранных для поддиапазона.
18. Устройство по п.17, в котором, по меньшей мере, два управляющих вектора для каждого поддиапазона известны только передающему объекту и принимающему объекту для PDU.
19. Устройство по п.15, в котором каждый управляющий вектор включает в себя Т элементов, имеющих одинаковую величину, но разные фазы, где Т - число передающих антенн, используемых для передачи PDU, являющееся целым числом, большим, чем единица.
20. Устройство передачи данных от передающего объекта к принимающему объекту в беспроводной системе связи с множеством антенн, использующей мультиплексирование с ортогональным частотным разделением (OFDM), содержащее
средство для обработки протокольного блока данных (PDU) для получения блока символов данных;
средство для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов для получения, для PDU, множества последовательностей символов пилот-сигнала и данных для множества поддиапазонов; и
средство для выполнения пространственной обработки над последовательностью символов пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, одного управляющего вектора, выбранного для поддиапазона, причем пространственная обработка рандомизирует множество действующих каналов с одним входом и одним выходом (SISO), воспринимаемых во множестве поддиапазонов.
21. Устройство по п.20, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатывается с использованием одного управляющего вектора, выбранного для поддиапазона.
22. Устройство по п.20, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатывается с использованием, по меньшей мере, двух управляющих векторов, выбранных для поддиапазона.
23. Устройство по п.22, в котором, по меньшей мере, два управляющих вектора для каждого поддиапазона известны только передающему объекту и принимающему объекту для пакета данных.
24. Устройство по п.20, в котором каждый управляющий вектор включает в себя Т элементов, имеющих одинаковую величину, но разные фазы, где Т - число передающих антенн, используемых для передачи PDU, являющееся целым числом, большим, чем единица.
25. Способ передачи данных от передающего объекта к принимающему объекту в беспроводной системе связи с множеством входов и множеством выходов (MIMO), использующей мультиплексирование с ортогональным частотным разделением (OFDM), содержащий
обработку протокольного блока данных (PDU) для получения блока символов данных;
демультиплексирование символов пилот-сигнала и блока символов данных на множество поддиапазонов и
выполнение пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, одной управляющей матрицы, выбранной для поддиапазона, причем пространственная обработка рандомизирует множество действующих MIMO-каналов для множества поддиапазонов, воспринимаемых символами пилот-сигнала и данных, переданными во множестве поддиапазонов.
26. Способ по п.25, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатываются с использованием одной управляющей матрицы, выбранной для поддиапазона.
27. Способ по п.26, в котором, одна управляющая матрица, используемая для пространственной обработки для каждого поддиапазона, не известна принимающему объекту.
28. Способ по п.25, в котором символы пилот-сигнала и данных для каждого поддиапазона пространственно обрабатываются с использованием отличающейся управляющей матрицы для каждого периода символа.
29. Способ по п.25, в котором, по меньшей мере, одна управляющая матрица, используемая для пространственной обработки для каждого поддиапазона, известна только передающему объекту и принимающему объекту.
30. Способ по п.25, в котором пространственная обработка с использованием, по меньшей мере, одной управляющей матрицы для каждого поддиапазона выполняется только над символами данных.
31. Способ по п.25, в котором символы пилот-сигнала используются для оценивания канала принимающим объектом.
32. Способ по п.25, дополнительно содержащий умножение расширенных символов для каждого поддиапазона, полученных из пространственной обработки, на, по меньшей мере, одну управляющую матрицу для передачи расширенных символов на собственных модах MIMO-канала для поддиапазона.
33. Способ по п.25, дополнительно содержащий выбор, по меньшей мере, одной управляющей матрицы для каждого поддиапазона из набора L управляющих матриц, где L -целое число, большее, чем единица.
34. Способ по п.28, дополнительно содержащий выбор управляющей матрицы для каждого поддиапазона в каждом периоде символа из набора L управляющих матриц, где L - целое число, большее, чем единица.
35. Способ по п.33, в котором L управляющих матриц в наборе таковы, что любая пара управляющих матриц из L управляющих матриц имеет низкую корреляцию.
36. Устройство передачи данных от передающего объекта к принимающему объекту в беспроводной системе связи с множеством входов и множеством выходов (MIMO), использующей мультиплексирование с ортогональным частотным разделением (OFDM), содержащее процессор данных, предназначенный для обработки протокольного блока данных (PDU) для получения блока символов данных;
демультиплексор, предназначенный для демультиплексирования символов пилот-сигнала и блока символов данных на множество поддиапазонов, и
процессор пространственной обработки, предназначенный для выполнения пространственной обработки над символами пилот-сигнала и данных для каждого поддиапазона с использованием, по меньшей мере, одной управляющей матрицы, выбранной для поддиапазона, причем пространственная обработка рандомизирует множество действующих MIMO-каналов для множества поддиапазонов, наблюдаемых символами пилот-сигнала и данных, переданными во множестве поддиапазонов.
| US 2004002364 A1, 01.01.2004 | |||
| ИСПОЛЬЗОВАНИЕ ОРТОГОНАЛЬНЫХ СИГНАЛОВ ДЛЯ ОБЕСПЕЧЕНИЯ СОВМЕСТНОГО ИСПОЛЬЗОВАНИЯ МНОЖЕСТВОМ ПЕРЕДАТЧИКОВ КАНАЛА МУЛЬТИПЛЕКСНОЙ ПЕРЕДАЧИ С КОДОВЫМ РАЗДЕЛЕНИЕМ | 1997 |
|
RU2202152C2 |
| US 2003128658 A1, 10.07.2003 | |||
| WO 03015334 A, 20.02.2003 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАМЕРА ИЗНОСА ГУСЕНИЧНОГОПОЛОТНА | 0 |
|
SU176110A1 |
| US 2003073464 A, 17.04.2003. | |||

