Изобретение относится к грузоподъемным механизмам и может быть использовано для создания периодического подъема и спуска груза, например скважинного штангового нефтяного насоса.
Известен способ создания тягового усилия, реализованный в виде лебедки, содержащей два зацепленных между собой зубчатых колеса, на периферии каждого из которых размещены свободновращающиеся ролики. Канат охватывает эти ролики, и при вращении колес ролики под действием центробежной силы прижимают канат к опорной поверхности, создавая тем самым тяговое усилие [Авт.свид. SU №1632931, B66D 1/26, 1991].
Недостатком известного способа является недостаточно надежное зацепление каната роликами, что снижает нагрузочную способность лебедки. Устройство, реализующее данный способ, обладает высокой сложностью, обусловленной наличием фрикционного механизма сцепления гибкого органа с приводом.
Наиболее близким по выполняемым функциям к заявляемому способу является способ создания тягового усилия, осуществляемый с помощью каната, который соединяют с грузонесущим органом, пропускают через фрикционные барабаны, тормозной механизм, направляющие ролики и закрепляют на приводном барабане, а тяговое усилие создают с помощью дополнительного грузоподъемного устройства, воздействующего на канат при одновременном затормаживании ветви каната, идущей от перемещаемого ролика к приводному барабану, с последующей остановкой ролика и затормаживанием ветви каната, идущей от грузонесущего органа на указанный ролик, который после этого перемещают в обратном направлении, при этом ветвь каната, идущую от перемещаемого ролика, растормаживают и канат наматывают на приводной барабан. Данный способ и реализующее его устройство выбраны в качестве прототипа [Авт.свид. SU №496228, B66D 1/26, 1975 (прототип)].
Недостатком известного способа является его сложность, обусловленная необходимостью использования дополнительного грузоподъемного устройства и многочисленных тормозных барабанов, направляющих роликов и приводного барабана, что снижает надежность устройства, реализующего способ, а также вызывает большие потери на трение каната о рабочие органы устройства, что снижает его КПД.
Задача, на решение которой направлено заявляемое изобретение, - повышение эффективности способа за счет снижения потерь энергии при одновременном повышении надежности за счет упрощения устройства.
Поставленная задача решается тем, что в способе создания тягового усилия, осуществляемом с помощью гибкого элемента, который соединяют с грузонесущим органом, пропускают через приводной механизм и направляющие ролики, в отличие от прототипа тяговое усилие создают путем вращения приводного механизма, деформирующего участок гибкого элемента в двух противоположных направлениях, тем самым укорачивающего его свободный конец и поднимающего груз.
Поставленная задача решается устройством, содержащим гибкий элемент, один конец которого соединен с грузонесущим органом и пропущен через направляющие ролики и приводной механизм, в котором в отличие от прототипа приводной механизм выполнен в виде по крайне мере одного ротора, содержащего два ролика, расположенных симметрично относительно оси вращения ротора, а высота подъема груза определяется выражением:
где H - высота подъема груза; D - диаметр ролика; А - межцентровое расстояние роликов; n - количество роторов; α - угол поворота ротора.
Во втором варианте устройства, реализующего способ, содержащего гибкий элемент, один конец которого соединен с грузонесущим органом и пропущен через направляющие ролики и приводной механизм, в отличив от прототипа приводной механизм выполнен в виде по крайней мере одного зубчато-реечного преобразователя вращательного движения в поступательное, содержащего два ползуна с зубчатыми рейками, зацепленными с разных сторон с ведущей шестерней, на ползунах размещены опорные ролики, а высота подъема груза определяется выражением:
где Н - высота подъема груза; D - делительный диаметр ведущей шестерни; k - количество оборотов, совершаемых шестерней; d - диаметр опорного ролика; n - количество ползунов.
На фиг.1,а приведена схема, поясняющая принцип создания тягового усилия с помощью вращающегося ротора с двумя роликами. На фиг.1,б показан вариант реализации устройства с двумя роторами. На фиг.1,в показан вариант устройства с тремя роторами.
На фиг.2 показан вариант реализации устройства с зубчато-реечным механизмом.
Для создания тягового усилия на гибком элементе 4 (фиг.1,а) направляющие ролики 5 поворачивают вокруг общей оси вращения на угол, не превышающий 250°, для предотвращения соприкосновения участков гибкого органа между собой (в случае применения в качестве гибкого органа втулочно-роликовой цепи это может привести к нарушению целостности элементов цепи). Гибкий элемент 4 наматывают на ролики 5, изгибая в виде буквы S. Это укорачивает свободный конец гибкого элемента 4 и груз Р, подвешенный к гибкому элементу, поднимается, приближаясь к опорному ролику 3. Направление вращения рабочего ротора не имеет значения. Высота подъема груза Р определяется соотношением:
где Н - высота подъема груза; D - диаметр ролика; А - межцентровое расстояние роликов; n - количество роторов; α - угол поворота ротора.
В случае создания тягового усилия с помощью зубчато-реечного механизма (фиг.2) в качестве источника силы используют вращение ведущей шестерни 6, вращение которой передается на зубчатые рейки 8 ползунов 7, что заставляет их перемещаться в противоположных направлениях и с помощью опорных роликов 9 изгибать участок гибкого элемента 12. Это укорачивает свободный конец гибкого элемента 12 и груз Р, подвешенный к гибкому элементу, поднимается, приближаясь к опорному блоку 11. Направление вращения ведущей шестерни 6 не имеет значения. Высота подъема груза Р определяется соотношением:
где Н - высота подъема груза; D - делительный диаметр ведущей шестерни; k - количество оборотов, совершаемых шестерней; d - диаметр опорного ролика; n - количество ползунов.
Устройство (вариант 1), реализующее предложенный способ создания тягового усилия, содержит роторы 1 (фиг.1, б, в), оси которых соединены зубчатыми колесами 2. Через опорный ролик 3, выполняющий роль грузонесущего органа, перекинут гибкий элемент 4, проходящий между направляющими роликами 5, связанными с роторами 1. Один конец гибкого элемента 4 жестко закреплен, а его свободный конец соединен с поднимаемым грузом. Количество соединенных между собой роторов 1 может быть несколько (более одного) для обеспечения необходимой высоты подъема груза.
Устройство работает следующим образом.
При вращении одного из зубчатых колес 2 от привода (не показан) вращение передается всем роторам 1, которые начинают вращаться синхронно.
При этом гибкий элемент 4 наматывается одновременно на все ролики 5, поднимая груз Р. Для спуска груза привод начинает вращать роторы 1 в противоположных направлениях, что приводит к освобождению гибкого элемента 4 и удлинению его свободного конца.
Вторым вариантом реализации предложенного способа создания тягового усилия является зубчато-реечный механизм, содержащий ведущую шестерню 6, соединенную с ползунами 7 через зубчатые рейки 8. На ползунах закреплены пары опорных роликов 9. Две пары направляющих роликов 10 и грузонесущий ролик 11 образуют трассу укладки гибкого элемента 12, один конец которого жестко закреплен (фиг.2), а свободный конец соединен с поднимаемым грузом. При использовании нескольких зубчато-реечных механизмов для обеспечения необходимой высоты подъема груза применяются соединительные шестерни 13, соединяющие дополнительные ползуны 7 с ведущей шестерней 6.
Устройство работает следующим образом.
При вращении ведущей шестерни 6 приводом (не показан) соединенные с ней зубчатыми рейками 8 ползуны 7 перемещаются в противоположных направлениях, изгибая опорными роликами 9 участок гибкого элемента 12. Соединительные шестерни 13 передают движение дополнительным ползунам 7, которые синхронно перемещаясь в противоположных направлениях, также изгибают участок гибкого элемента 12. Это приводит к укорочению свободного конца гибкого элемента 12 и подъему груза. Для спуска груза направление вращения ведущей шестерни 6 меняется на противоположное.
По сравнению с грузоподъемными устройствами аналогичного назначения предлагаемое техническое решение обладает следующими преимуществами:
- простотой конструкцией, обусловленной небольшим количеством деталей;
- блочное построение конструкции подъемника позволяет наращивать высоту подъема без изменения базового варианта;
- симметричное построение преобразователя вращения в перемещение гибкого органа позволяет осуществлять спуск и подъем груза без реверса привода, что удобно при необходимости периодического подъема и спуска;
- повышенная надежность обеспечивается жесткостью кинематических связей элементов механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗБАЛАНСИРНЫЙ ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2006 |
|
RU2320894C1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 1999 |
|
RU2160852C1 |
| БЕЗБАЛАНСИРНЫЙ ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2015 |
|
RU2619411C1 |
| БЕЗБАЛАНСИРНЫЙ ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2010 |
|
RU2445511C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧИВАНИЯ БЕЗОПАСНОСТИ ПРИ РАЗГРУЗКЕ-ПОГРУЗКЕ МЕТАЛЛОПРОКАТА ИЗ (В) ВАГОН | 2021 |
|
RU2774825C1 |
| ПРИВОД ГЛУБИННОГО НАСОСА | 1999 |
|
RU2163311C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
| Устройство для подъема строительных грузов при малоэтажном строительстве | 2021 |
|
RU2781171C1 |
| РЕВЕРСИВНЫЙ БЕССТУПЕНЧАТЫЙ РЕДУКТОР | 2000 |
|
RU2188351C2 |
| Устройство для подъема автосамосвалов из карьера | 1981 |
|
SU998324A1 |
Изобретение относится к грузоподъемным механизмам и может быть использовано для периодического подъема и спуска груза, например скважинного штангового нефтяного насоса. В первом варианте деформация участка гибкого элемента осуществляется с помощью вращающегося ротора, содержащего два ролика, расположенных симметрично относительно оси вращения ротора. Между роликами проходит гибкий элемент, который при вращении ротора наматывается на ролики, принимая S-образную форму. Во втором варианте деформация участка гибкого элемента осуществляется зубчато-реечным механизмом, содержащим два ползуна, снабженных зубчатыми рейками, зацепленными с противоположных сторон с ведущей шестерней. При вращении ведущей шестерни ползуны перемещаются в противоположных направлениях и увлекают за собой участки гибкого элемента, укорачивая тем самым его свободный конец и поднимая груз. Предлагаемое техническое решение обладает повышенной надежностью, простотой конструкции и высокими эксплуатационными качествами. 2 н.п. ф-лы, 2 ил.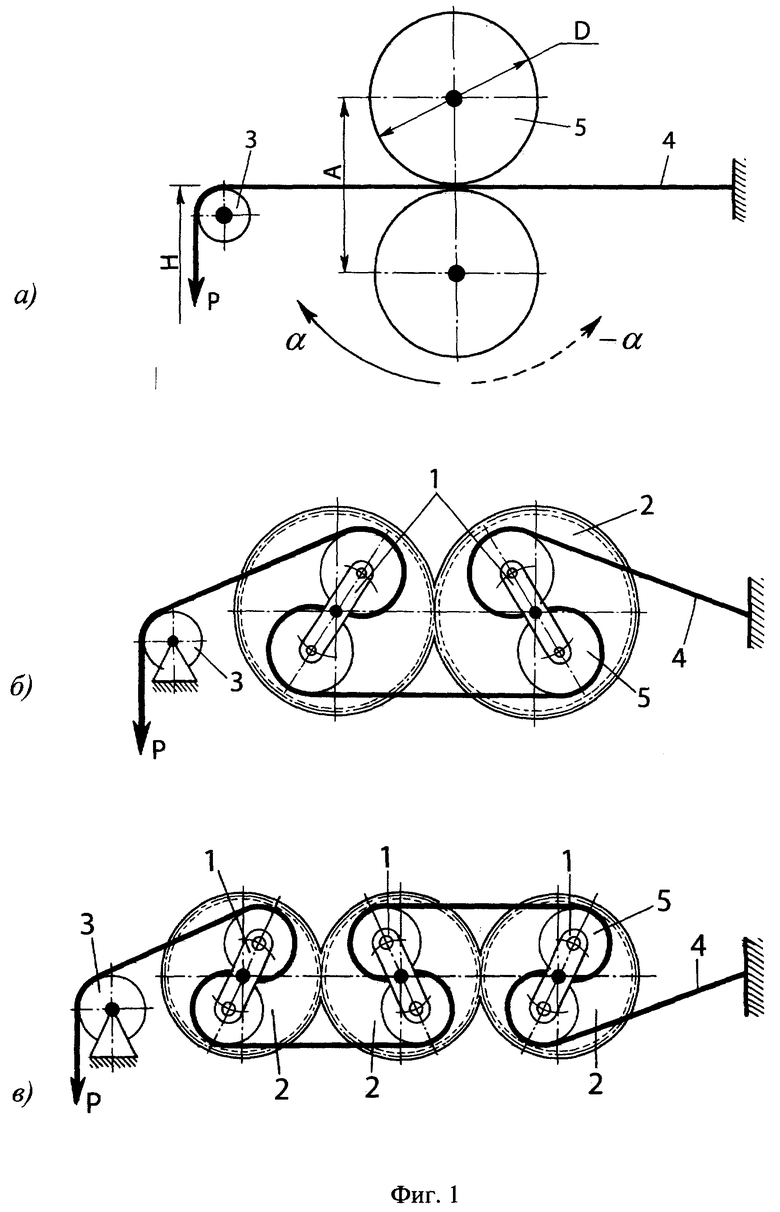
1. Устройство для создания тягового усилия, содержащее гибкий элемент, один конец которого соединен с грузонесущим органом и пропущен через направляющие ролики и приводной механизм, отличающееся тем, что приводной механизм выполнен в виде по крайне мере одного ротора, содержащего два ролика, расположенных симметрично относительно оси вращения ротора, а высота подъема груза определяется выражением
где Н - высота подъема груза; D - диаметр ролика; А - межцентровое расстояние роликов; n - количество роторов; α - угол поворота ротора.
2. Устройство для создания тягового усилия, содержащее гибкий элемент, один конец которого соединен с грузонесущим органом и пропущен через направляющие ролики и приводной механизм, отличающееся тем, что приводной механизм выполнен в виде по крайней мере одного зубчато-реечного преобразователя вращательного движения в поступательное, содержащего два ползуна с зубчатыми рейками, зацепленными с разных сторон с ведущей шестерней, на ползунах размещены опорные ролики, а высота подъема груза определяется выражением
где Н - высота подъема груза; D - делительный диаметр ведущей шестерни; k - количество оборотов, совершаемых шестерней; d - диаметр опорного ролика; n - количество ползунов.
| Лебедка | 1989 |
|
SU1632931A1 |
| Способ создания тягового усилия | 1974 |
|
SU496228A1 |
| Лебедка монтажная | 1979 |
|
SU829549A1 |
| СЕКЦИЯ ГРЕБНЕВОЙ СЕЯЛКИ | 2016 |
|
RU2622165C1 |

