Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при ремонте железнодорожных путей.
Наиболее известным является устройство передвижения груза с канатной тягой, содержащее тележку с жесткой рамой, на которой неподвижно закреплены две оси со свободно вращающимися на них колесами и блоками подъемного каната. Тяговый канат привода передвижения огибает стационарный блок и состоит из верхней и нижней ветвей. Обе ветви прикреплены к раме тележки, а их противоположные концы к тяговому барабану. Один конец каната привода подъема закреплен на металлоконструкции, а второй - на барабане привода подъема [1].
Данное устройство конструктивно сложно, обладает большой материалоемкостью.
Недостатками прототипа являются во-первых, сложность конструкции из-за наличия двух механизмов: механизма подъема и механизма передвижения со своими приводами, во-вторых, большая материалоемкость.
Техническим результатом изобретения является упрощение конструкции, снижение материалоемкости.
В основу изобретения положено решение задачи: упрощение конструкции устройства для подъема и передвижения груза и уменьшение материалоемкости путем использования общих элементов приводов.
Поставленная задача решается тем, что в устройстве для подъема и передвижения груза, содержащем несущую балку, грузовую тележку, связанную гибкой тягой с приводом подъема грузозахватного органа, привод подъема выполнен в виде блока разновеликих звездочек, установленных неподвижно относительно друг друга на общей оси привода, снабженного приводной рукояткой и тормозом, а привод передвижения грузовой тележки снабжен зубчатой парой, ведомая шестерня которой установлена на одной оси единым блоком со звездочкой грузовой тележки и входит в зацепление с ведущей шестерней со штурвалом, при этом гибкая тяга входит в зацепление со звездочкой большего диаметра привода подъема, огибая звездочку грузовой тележки, ролик грузозахватного органа, поддерживающий ролик грузовой тележки, обводной элемент, звездочку меньшего диаметра привода подъема и, образуя свободную петлю, введенный в устройство ролик для обеспечения гарантированного зацепления гибкой тяги со звездочкой большего диаметра привода подъема.
Во втором варианте поставленная задача решается тем, что в устройстве для подъема и передвижения груза, содержащем несущую балку с грузовой тележкой, связанной гибкой тягой с приводом подъема грузозахватного органа, привод подъема выполнен в виде блока разновеликих барабанов, установленных неподвижно относительно друг друга на общей оси привода, снабженного приводной рукояткой и тормозом, а привод передвижения грузовой тележки снабжен зубчатой парой, ведомая шестерня которой установлена на одной оси единым блоком с барабаном грузовой тележки и входит в зацепление с ведущей шестерней со штурвалом, при этом гибкая тяга прикрепляется к блоку разновеликих барабанов привода подъема в противоположных направлениях навивки, огибая поддерживающий ролик грузовой тележки, ролик грузозахватного органа, барабан грузовой тележки, образуя угол обхвата с ним, составляющий не менее 270o, обводной элемент.
Сущность изобретения поясняется чертежами, где на фигурах 1 и 2 изображено устройство для подъема и передвижения груза.
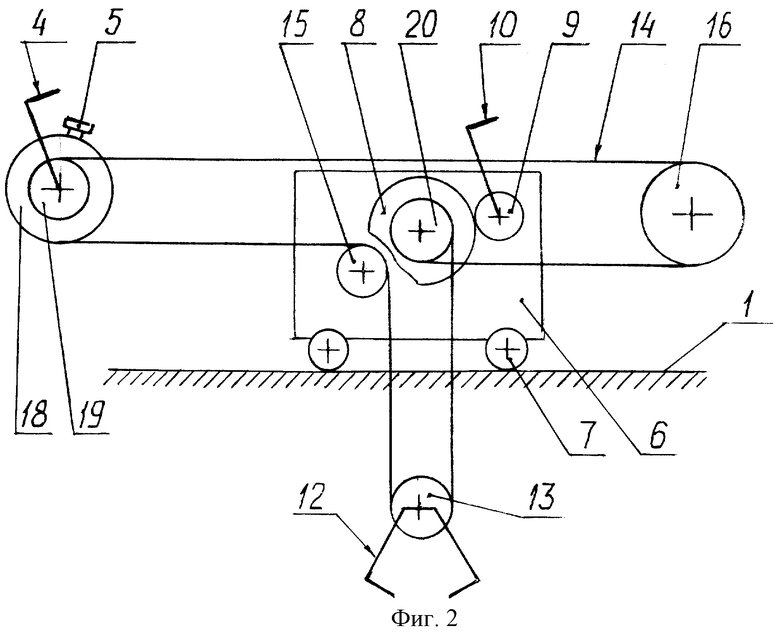
На фиг.1 изображено устройство для подъема и передвижения груза с гибкой бесконечной тягой в виде цепи.
На фиг.2 - устройство для подъема и передвижения груза с гибкой тягой в виде каната.
Позиции на чертежах обозначают:
Фиг.1
Несущая балка 1, звездочка большего диаметра 2, звездочка меньшего диаметра 3, приводная рукоятка 4, тормоз 5, грузовая тележка 6 с ходовыми колесами 7, ведомая шестерня 8, ведущая шестерня 9 со штурвалом 10, звездочка 11 грузовой тележки 6, грузозахватный орган 12, ролик 13, гибкая тяга 14, поддерживающий ролик 15, обводной элемент 16, ролик для гарантированного зацепления гибкой тяги со звездочкой большего диаметра 17.
Фиг.2.
Несущая балка 1, барабан большего диаметра 18, барабан меньшего диаметра 19, приводная рукоятка 4, тормоз 5, грузовая тележка 6 с ходовыми колесами 7, ведомая шестерня 8, ведущая шестерня 9 со штурвалом 10, барабан 20 грузовой тележки 6, грузозахватный орган 12, ролик 13 грузозахватного органа 12, гибкая тяга 14, поддерживающий ролик 15, обводной элемент 16.
Устройство для подъема и передвижения груза состоит из несущей балки 1 с закрепленным на ней блоком звездочек привода подъема большего диаметра 2 и меньшего диаметра 3, установленных неподвижно относительно друг друга, снабженных приводной рукояткой 4 и тормозом 5, грузовой тележки 6 с ходовыми колесами 7, на которой установлен привод передвижения в виде зубчатой пары, ведомая шестерня 8 которой находится в зацеплении с ведущей шестерней 9 с закрепленным на ней штурвалом 10, звездочки 11 грузовой тележки 6, соединенной неподвижно с ведомой шестерней 8, грузозахватного органа 12. Грузозахватный орган 12 крепится на оси ролика 13 и висит на двух ветвях гибкой тяги 14, которая опирается на звездочку 11 грузовой тележки 6 и поддерживающий ролик 15, огибая обводной элемент 16, соединяется со звездочкой меньшего диаметра 3 и, образуя свободную петлю, входит в зацепление с роликом 17 и звездочкой большего диаметра 2.
Гибкая тяга 14 входит в зацепление со звездочкой большего диаметра в точке, расположенной ниже оси вращения блока звездочек, а со звездочкой меньшего диаметра - в точке, расположенной выше оси вращения блока звездочек. При зацеплении бесконечной гибкой тяги с блоком разновеликих звездочек привода подъема возникают моменты относительно оси вращения блока звездочек от силы тяжести груза противоположного направления, что способствует значительному уменьшению усилия, прикладываемого к рукоятке 4 привода подъема.
Устройство подъема и передвижения груза работает следующим образом.
При вращении рукоятки 4 привода подъема по часовой стрелке происходит сматывание гибкой тяги 14 со звездочки 3 меньшего диаметра и ее наматывание на звездочку 2 большего диаметра. Вследствие разности диаметров звездочек 2 и 3 за один полный оборот рукоятки 4 на звездочку 2 наматывается гибкая тяга длиной C= πD (где С - длина при наматывании гибкой тяги, D - диаметр звездочки большего диаметра, π- постоянная величина, равная 3,14), а со звездочки 3 сматывается гибкая тяга длиной C1=πd (где C1 - длина гибкой тяги при сматывании, d - диаметр звездочки меньшего диаметра), т.е. разность ΔС=С-С1 определяет разницу длин наматывания и сматывания гибкой тяги 14 на звездочки 2 и 3 и тем самым происходит подъем грузозахватного органа 12 с грузом. Если рукоятка привода подъема 4 вращается против часовой стрелки, гибкая тяга 14 сматывается со звездочки 2 большего диаметра и наматывается на звездочку 3 меньшего диаметра. При этом за один полный оборот рукоятки 4 со звездочки 2 сматывается гибкая тяга длиной C=πD, а на звездочку 3 наматывается гибкая тяга длиной С1=πd, т.е. разность ΔC=C-C1 определяет разницу длин сматывания и наматывания гибкой тяги на звездочки 2 и 3 и тем самым происходит опускание грузозахватного органа 12 с грузом.
При вращении штурвала 10 привода передвижения по часовой стрелке синхронно с ним повернется ведущая шестерня 9, которая передает вращение ведомой шестерне 8 и сопряженной с ней звездочке 11 грузовой тележки, которая, контактируя с гибкой тягой 14, будет совершать обкатку по натянутой от действия груза гибкой тяге 14 как опорной направляющей. Возникающая при этом сила реакции перемещает грузовую тележку 6 на ходовых колесах 7 по несущей балке 1 в правую сторону, то есть в сторону вращения штурвала 10, при этом высота поднятого груза остается постоянной, ролик 13 грузозахватного органа 12 и поддерживающий ролик 15 вращаются, обкатываясь по гибкой тяге 14.
При вращении штурвала 10 привода передвижения грузовой тележки против часовой стрелки синхронно с ним повернется ведущая шестерня 9, которая передает вращение ведомой шестерне 8 и соединенной с ней звездочке 11 грузовой тележки, которая, контактируя с гибкой тягой 14, будет совершать обкатку на натянутой от действия груза гибкой тяге 14 как опорной направляющей. Возникающая при этом сила реакции перемещает грузовую тележку 6 на ходовых колесах 7 по несущей балке 1 в левую сторону, то есть в сторону вращения штурвала 10, при этом высота поднятого груза остается постоянной, а ролик 13 грузозахватного органа 12 и поддерживающий ролик 15 вращаются, обкатываясь по гибкой тяге 14.
При необходимости передвинуть тележку 6 вправо или влево, когда грузозахватный орган 12 не держит груз, достаточно в нужном направлении приложить усилие руки на тележку 6, которая свободно передвинется по несущей балке 1.
Устройство для подъема и передвижения состоит из несущей балки 1 с закрепленным на ней блоком разновеликих барабанов привода подъема большего диаметра 18 и меньшего диаметра 19, установленных на общей оси привода, снабженного рукояткой 4 и тормозом 5, грузовой тележки 6 с ходовыми колесами 7, на которой установлен привод передвижения в виде зубчатой пары, ведомая шестерня 8 которой установлена на одной оси единым блоком с барабаном грузовой тележки, находится в зацеплении с ведущей шестерней 9 с закрепленным на ней штурвалом 10, грузозахватного органа 12.
Грузозахватный орган 12 крепится на оси ролика 13 и висит на двух ветвях гибкой тяги 14. Гибкая тяга 14 крепится к блоку разновеликих барабанов 18 и 19 привода подъема в противоположных направлениях навивки, огибая барабан 20 грузовой тележки 6, ролик 13 грузозахватного органа 12, поддерживающий ролик 15 грузовой тележки 6, образуя угол обхвата с ним, составляющий не менее 270o, обводной элемент 16. Гибкая тяга 14 прикрепляется к барабану большего диаметра в точке, расположенной ниже оси вращения блока разновеликих барабанов, а к барабану меньшего диаметра - в точке, расположенной выше оси вращения блока разновеликих барабанов.
Устройство подъема и передвижения груза работает следующим образом.
При вращении рукоятки 4 привода подъема по часовой стрелке происходит сматывание гибкой тяги 14 в виде каната с барабана 19 меньшего диаметра и его наматывание на барабан 18 большего диаметра.
Вследствие разницы диаметров барабанов 18 и 19 за один полный оборот рукоятки 4 на барабан 18 наматывается гибкая тяга длиной C=πD, а с барабана 19 сматывается гибкая тяга длиной C1=πd, т.е. разность ΔC=C-C1 определяет разницу длин наматывания и сматывания гибкой тяги 14 на барабаны 18 и 19 и тем самым происходит подъем грузозахватного органа 12 с грузом. Если рукоятка 4 привода подъема вращается против часовой стрелки, гибкая тяга 14 сматывается с барабана 18 большего диаметра и наматывается на барабан 19 меньшего диаметра. При этом за один полный оборот рукоятки 4 с барабана 18 сматывается гибкая тяга длиной C=πD, а на барабан 19 наматывается гибкая тяга длиной C1= πd, т. е. разность ΔC=C-C1 определяет разницу длин сматывания и наматывания гибкой тяги на барабаны 18 и 19 и тем самым происходит опускание грузозахватного органа 12 с грузом.
При вращении штурвала 10 привода передвижения по часовой стрелке синхронно с ним поворачивается ведущая шестерня 9, которая передает вращение ведомой шестерне 8, и сопряженным с ней барабаном 20 грузовой тележки 6, который контактируя с гибкой тягой 14 за счет силы трения, возникающей от действия поднятого груза, будет совершать обкатку по натянутой от действия груза гибкой тяге 14 как опорной направляющей; возникающая при этом сила реакции перемещает грузовую тележку 6 на ходовых колесах 7 по несущей балке 1 в левую сторону, при этом высота поднятого груза остается постоянной. Ролик 13 грузозахватного органа 12 и поддерживающий ролик 15 вращаются, обкатываясь по гибкой тяге 14.
При вращении штурвала 10 привода передвижения грузовой тележки 6 против часовой стрелки синхронно с ним повернется ведущая шестерня 9, которая передает вращение ведомой шестерне 8, и соединенным с ней барабаном 20 грузовой тележки 6, который, контактируя с гибкой тягой 14 за счет силы трения, возникшей от действия груза, будет совершать обкатку по натянутой от действия груза гибкой тяге 14 как опорной направляющей, будет натягивать ее, перекатываясь.
Возникающая при этом сила реакции перемещает тележку 6 на ходовых колесах 7 по несущей балке 1 в правую сторону, при этом высота поднятого груза остается постоянной, а ролик 13 грузозахватного органа 12 и поддерживающий ролик 15 вращаются, обкатываясь по гибкой тяге 14.
При необходимости передвинуть грузовую тележку 6 без груза вправо или влево достаточно в нужном направлении приложить усилие руки на грузовую тележку 6, которая свободно передвинется по несущей балке 1.
Предложенные варианты конструкции устройства для подъема и передвижения груза с ручным приводом обеспечат подъем и передвижение груза с использованием общих элементов приводов при уменьшенных массогабаритных характеристиках устройства.
Источники информации
1. Александров М.П. и др. Грузоподъемные машины. Издание второе, переработанное. - М.: Машиностроение, 1986, стр.245, 246.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уменьшения раскачивания грузозахватного органа с грузом,подвешенного на грузовой тележке | 1981 |
|
SU988747A1 |
| Подвесной кран | 1971 |
|
SU598834A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| ТЕЛЕЖКА ГРУЗОВАЯ КРАНОВ МОСТОВОГО ТИПА | 2005 |
|
RU2317246C2 |
| Устройство для подъема и перемещения груза | 1986 |
|
SU1426936A1 |
| Грузовая тележка крана | 1977 |
|
SU806586A1 |
| Монорельсовая транспортная система | 1987 |
|
SU1438994A1 |
| Строительный подъемник | 1977 |
|
SU701912A1 |
| Устройство для выдвижения консоли пролетной балки козлового крана | 1985 |
|
SU1390174A1 |
| Домкрат | 1981 |
|
SU992411A2 |
Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано, в частности, при ремонте железнодорожных путей. Устройство для подъема и передвижения груза содержит несущую балку, грузозахватный орган и грузовую тележку, связанную гибкой тягой с приводом подъема грузозахватного органа. Согласно первому варианту привод подъема выполнен в виде блока разновеликих звездочек, установленных на несущей балке неподвижно относительно друг друга на общей оси этого привода, снабженного приводной рукояткой и тормозом. Привод передвижения, установленный на тележке, снабжен зубчатой парой, ведомая шестерня которой установлена на одной оси с образованием единого блока со звездочкой грузовой тележки и входит в зацепление с ведущей шестерней со штурвалом, при этом гибкая тяга входит в зацепление со звездочкой большего диаметра привода подъема, огибая звездочку грузовой тележки, ролик грузозахватного органа, поддерживающий ролик грузовой тележки, обводной элемент, звездочку меньшего диаметра привода подъема и, образуя свободную петлю, ролик, обеспечивающий гарантированное зацепление этой тяги со звездочкой большего диаметра привода подъема. Согласно второму варианту привод подъема выполнен в виде блока разновеликих барабанов, установленных на несущей балке на общей оси этого привода, снабженного приводной рукояткой и тормозом. Привод передвижения грузовой тележки в этом варианте снабжен зубчатой парой, ведомая шестерня которой установлена на одной оси с образованием единого блока с барабаном грузовой тележки и входит в зацепление с ведущей шестерней со штурвалом, при этом гибкая тяга прикреплена к блоку разновеликих барабанов привода подъема с образованием противоположного направления навивки, огибая поддерживающий ролик грузовой тележки, ролик грузозахватного органа, барабан грузовой тележки, образуя на нем угол обхвата, составляющий не менее 270o, и обводной элемент. Изобретение обеспечивает упрощение конструкции и снижение металлоемкости. 2 с.п. ф-лы, 2 ил.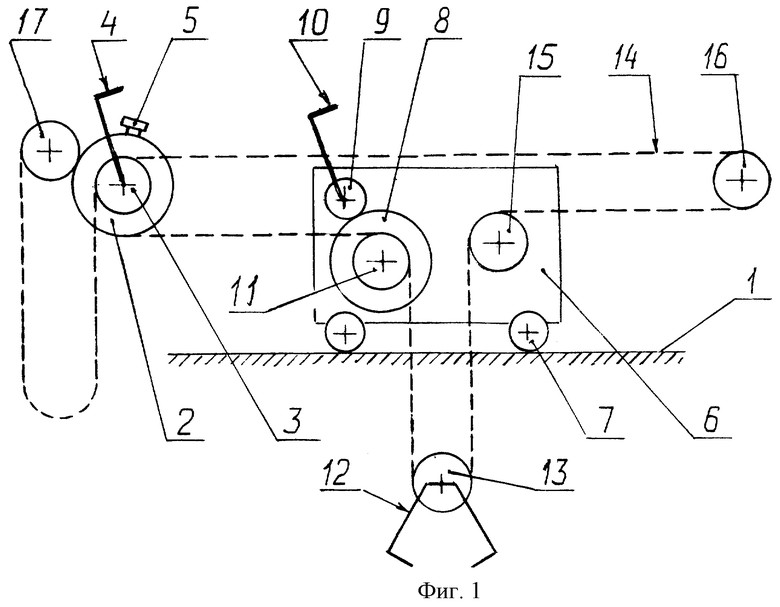
| SU 1150211 А, 15.04.1985 | |||
| Подъемно-транспортирующее средство | 1979 |
|
SU895903A1 |
| 1972 |
|
SU426953A1 | |
| Узел герметизации проходки стержневого элемента через стенку | 1983 |
|
SU1226936A1 |
| DE 4126508 Al, 11.02.1993. | |||

