Предлагаемое изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода.
Известен способ формирования импульсов из сигналов датчиков, в котором измеряют и сравнивают величины двух соседних одинаковых по полярности сигналов датчика, причем сначала измеряют величину ec1 первого сигнала, запоминают его амплитуду А1, вырабатывают пороговое значение uпор1=P·A1, где Р<1, затем измеряют величину ес2 второго сигнала датчика, в процессе измерения сравнивают получаемые величины ес2 с пороговым значением uпор1 и при выполнении условия ec2>uпор1 вырабатывают требуемый импульс. Одновременно с измерением величины сигнала ес2 запоминают его амплитуду А2, вырабатывают пороговое значение uпор2=Р·А2, используемое в следующем цикле формирования импульсов. С приходом каждого нового сигнала датчика повторяют процесс формирования требуемого импульса. По этому способу выполнено устройство [1].
Такой способ неэффективен при изменении амплитуды сигналов в широких пределах, так как понижение порога, необходимое для сигналов низкого уровня, уменьшает помехоустойчивость формирования импульсов из сигналов датчиков.
Наиболее близким по технической сущности к заявленному способу является способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют и сравнивают вольт-секундные площади двух соседних одинаковых по полярности полуволн двухполярных сигналов индукционного датчика частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине вольт-секундной площади исследуемых полуволн сигналов, затем измеряют вольт-секундную площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс. Одновременно с измерением вольт-секундной площади S2 запоминают ее максимальное значение S2к, вырабатывают пороговое значение Sпор2=Q·S2к, необходимое для реализации следующего цикла формирования импульсов. С поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса. Способ-прототип нашел реализацию в устройстве [2].
Первым существенным недостатком способа-прототипа является низкая помехоустойчивость формирования требуемых импульсов. Этот недостаток вызван, во-первых, тем, что процесс формирования импульсов не защищен от воздействия однополярных сигналов-помех, вольт-секундная площадь Sпом которых превышает пороговые значения Sпр.min и Sпор1. Такие помехи, имея одинаковую полярность с исследуемыми полуволнами сигналов, приводят к формированию рассматриваемым способом ложных импульсов.
Во-вторых, при формировании импульсов из сигналов индукционных датчиков частоты вращения, инициируемых несколькими возбудителями (z≥2), рассматриваемый способ не позволяет устанавливать величину порога Sпор1 формирования требуемых импульсов, близкую к вольт-секундной площади S1к исследуемых полуволн сигналов.
Последнее утверждение объясняется следующим. Пусть вольт-секундная площадь исследуемых полуволн сигналов индукционного датчика частоты вращения имеет номинальное значение Sн, а максимальное отклонение ее от номинального значения составляет ±ΔS или в относительных величинах -α=±ΔS/Sн. Тогда максимальное допустимое значение вольт-секундной площади будет равно Smax=Sн·(1+α), а минимальное - Smin=Sн·(1-α).
При поступлении сигнала ec1 (фиг.1), вольт-секундная площадь S1к исследуемой полуволны которого имеет максимальную величину Smax, вырабатывается пороговый уровень, равный Sпор1max=Q·Smax, и для того, чтобы был сформирован требуемый импульс при последующем поступлении полуволны сигнала ес2, имеющей минимальную вольт-секундную площадь Smin, необходимо выполнить условие Sпор1max≤Smin.
Из последнего отношения получаем

Выбранное с учетом зависимости (1) значение параметра Q остается неизменным в процессе формирования импульсов из сигналов индукционных датчиков частоты вращения.
При этом минимальное значение Sпор1min порога формирования требуемого импульса будет иметь место при поступлении сигнала, вольт-секундная площадь исследуемой полуволны которого равна Smin, и определится

В таблице представлены результаты расчета параметров Q и Sпор1min/Sн по формулам (1) и (2).

Как видно из таблицы, минимальное значение Sпор1min порога формирования импульсов существенно зависит от величины а максимального отклонения вольт-секундной площади исследуемых полуволн сигналов. Так, например, при α=5% имеем Sпор1min<0,86·Sн, то есть при α=5% порог Sпор1min меньше номинального значения Sн на 14%, при α=10% - на 26%, а при α=22% он составляет только половину Sн.
Отклонение ΔS вольт-секундной площади исследуемых полуволн сигналов от ее номинального значения Sн зависит от неточности установки зазора между возбудителями сигналов и индукционным датчиком частоты вращения, от разброса геометрических и магнитных параметров возбудителей и при числе возбудителей z≥2 может составлять значительную величину. Поэтому в рассматриваемом случае порог Sпор1 формирования импульсов устанавливается значительно ниже вольт-секундной площади S1к исследуемой полуволны сигнала, а его минимальное значение Sпор1min получается существенно меньше номинального значения Sн вольт-секундной площади исследуемых полуволн сигналов, что и приводит к снижению помехоустойчивости процесса формирования импульсов способом-прототипом.
Вторым существенным недостатком способа-прототипа является значительная погрешность в повторении формируемыми импульсами длительности периодов следования сигналов ее датчиков частоты вращения.
Такая погрешность обусловлена тем, что при наличии отклонений ΔS площади исследуемых полуволн сигналов от ее номинального значения Sн в рассматриваемом способе формируются импульсы, периоды Ти следования которых не равны соответствующим периодам Тc сигналов индукционных датчиков частоты вращения (фиг.2). Разница длительностей этих периодов зависит от величины ΔS, причем максимальное значение периода Ти мах имеет место, когда за сигналом с площадью Sмах следует сигнал с площадью Smin, а минимальное значение периода Ти min - когда за сигналом с площадью Smin следует сигнал с площадью Sмах. При построении графиков фиг.2 и 5 принято значение ΔS, при котором Q=5/8=0.625. Числа, указанные на графиках, представляют собой условные единицы времени.
Кроме того, индукционные датчики частоты вращения вырабатывают двухполярные сигналы, а в способе-прототипе формируются импульсы при наличии однополярных сигналов, то есть информация о наличии второй полуволны (противоположной полярности) не учитывается, что снижает достоверность (надежность) формируемых импульсов.
Перечисленные выше недостатки способа-прототипа приводят к понижению помехоустойчивости, точности и надежности повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении помехоустойчивости, точности и надежности повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения.
Для достижения указанного технического результата в способе формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют и сравнивают вольт-секундные площади двух соседних одинаковых по полярности полуволн двухполярных сигналов индукционного датчика частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине вольт-секундной площади исследуемых полуволн сигналов, затем измеряют вольт-секундную площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс в отличие от прототипа:
1. В качестве первой измеряемой полуволны используют первую полуволну, а в качестве второй измеряемой полуволны - вторую (противоположной полярности) полуволну одного и того же двухполярного сигнала индукционного датчика частоты вращения, причем в процессе измерения вольт-секундной площади S1 первой полуволны сравнивают получаемые величины S1 с пороговым значением Sпр.min и в момент выполнения условия S1>Sпр.min вырабатывают разрешение на измерение вольт-секундной площади S2 второй (противоположной полярности) полуволны, которое отменяют в начале или после начала выдачи требуемого импульса, с поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса.
2. В дополнение к п.1, в процессе измерения вольт-секундной площади S2 второй (противоположной полярности) полуволны двухполярного сигнала индукционного датчика частоты вращения вырабатывают дополнительный параметр Sx=(1+Q)·S2/2, сравнивают его максимальную величину Sхк с пороговыми значениями Sпор1=Q·S1к и Sпор2=S1к и при выполнении условий S1к>Sпр.min, Sпор1<Sхк<Sпор2 (вместо условий S1к>Sпр.min, S2>Sпор1 по п.1) вырабатывают требуемый импульс.
В отличие от прототипа в предлагаемом способе формирования импульсов из сигналов индукционных датчиков частоты вращения осуществляется измерение и сравнение вольт-секундных площадей двух полуволн сигнала, инициируемого одним возбудителем (фиг.3а).
Индукционные датчики частоты вращения работают на основе закона Фарадея, согласно которому индуцированная ЭДС ес определяется скоростью изменения магнитного поля Ф, сцепленного с катушкой из w витков [3]:
В рассматриваемом случае изменение магнитного поля вызывается пересечением силовых линий поля магнита датчика выступами вращающегося возбудителя [4]. При входе возбудителя в магнитное поле в катушке индуцируется первая полуволна сигнала, а при его выходе - вторая полуволна, имеющая противоположную полярность.
Вольт-секундная площадь S1к первой полуволны такого сигнала примерно равна аналогичной площади S2к второй (противоположной полярности) полуволны, а отношение этих площадей R=S1к/S2к близко к 1, не зависит от погрешности установки зазора между датчиком и возбудителем, характеристик самого возбудителя и остается постоянным в широком диапазоне частоты вращения.
Поэтому предлагаемый способ позволяет устанавливать значение порога Sпор1 формирования импульсов, близкое к вольт-секундной площади S1к первой полуволны сигнала, что повышает помехоустойчивость процесса формирования импульсов из сигналов индукционных датчиков частоты вращения.
В качестве примера на фиг.3б показан двухполярный сигнал-помеха, вольт-секундная площадь второй полуволны которого несколько меньше аналогичной площади первой полуволны. В данном случае предлагаемый способ исключает формирование импульса.
Кроме того, в отличие от прототипа в предлагаемом способе формирование импульсов осуществляется только при наличии двухполярного сигнала, причем один или несколько однополярных сигналов-помех (любой полярности и величины) не приводят к формированию ложных импульсов (фиг.3в). Такое условие повышает помехоустойчивость формирования импульсов и их достоверность (надежность). В прототипе каждый сигнал-помеха, имеющий одинаковую полярность с исследуемой полуволной сигнала и вольт-секундную площадь Sпом>Sпр.min, Sпом>Sпор1, приводит к формированию ложного импульса.
Второй пункт формулы предлагаемого способа формирования импульсов из сигналов индукционных датчиков частоты вращения предусматривает образование дополнительного параметра Sx=(1+Q)·S2/2 и сравнение его максимальной величины Sхк с пороговыми значениями Sпор1=Q·S1к и Sпор2=S1к. При этом Sхк=(1+Q)·S2к/2.
Так как номинальные значения вольт-секундных площадей двух полуволн одного сигнала индукционного датчика частоты вращения имеют примерно одинаковые величины S1к≈S2к, то приведенное выше уравнение для Sхк можно представить в виде

Из последнего уравнения следует, что в момент принятия решения о формировании требуемого импульса номинальное значение параметра Sхк равно средней арифметической величине порогов Sпор1 и Sпор2, то есть номинальное значение параметра Sхк на фиг.4а находится посредине между порогами Sпор1 и Sпор2.
При этом максимальное допустимое отклонение параметра Sхк от его номинального значения определится как ΔSx=S1к-Sхк=(1-Q)·S1к/2, a относительное значение этого отклонения будет равно γ=ΔSx/Sхк=(1-Q)/(1+Q).
Из последнего равенства следует, что п.2 формулы предусматривает весьма жесткий критерий наличия полезного сигнала: относительная величина допуска на изменение дополнительного параметра Sx (а с небольшой погрешностью можно считать - на изменение площади S2) имеет малое значение, например, при Q=0,95 γ=2,6%, при Q=0,9 γ=5,3%, при Q=0,8 γ=11%.
Кроме того, наличие отклонений ΔS площади исследуемых полуволн сигналов от ее номинального значения Sн в предлагаемом способе не влияет на длительность периодов повторения формируемых импульсов, которая в данном случае равна длительности соответствующих периодов следования сигналов индукционных датчиков частоты вращения (фиг.5).
Следовательно, предлагаемый способ формирования импульсов из сигналов индукционных датчиков частоты вращения в корне отличается от способа-прототипа, в котором измеряются и сравниваются вольт-секундные площади двух соседних одинаковых по полярности полуволн сигналов.
В предлагаемом способе анализу подлежит каждый двухполярный сигнал и формируется требуемый импульс при условии, что этот сигнал соответствует следующим требованиям:
1) сигнал должен быть двухполярным;
2) площадь S1к первой полуволны сигнала должна превышать Sпр.min;
3) вторая полуволна сигнала должна иметь полярность, противоположную полярности первой полуволны;
4) площадь S2к второй полуволны сигнала должна превышать порог Sпор1=Q·S1к, причем значение этого порога весьма высокое (близкое к S1к) - по п.1 формулы;
5) площадь S2к второй полуволны сигнала с небольшой погрешностью должна быть равной площади первой полуволны сигнала - по п.2 формулы.
Таким образом, все отличительные признаки, приведенные в двух пунктах формулы предлагаемого способа формирования импульсов из сигналов индукционных датчиков частоты вращения, позволяют сделать вывод о соответствии заявленного технического решения критерию «новизна». Эти признаки не выявлены в других технических решениях при изучении данной и смежных областей техники, позволяют получить новое качество и существенное отличие: обеспечивают высокую помехоустойчивость, точность и надежность повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения.
В приведенном тексте описания и на фиг.1-6 приняты следующие обозначения и сокращения:
А1, А2 - значения амплитуды исследуемых сигналов;
датчик - индукционный датчик частоты вращения;
ec - сигнал датчика;
eпом - сигнал помехи;
uф - сформированный импульс;
uпор - напряжение порога формирования импульсов;
S - площадь сигнала - вольт-секундная площадь полуволны сигнала;
S1, S2, S1к, S2к - соответственно получаемые в процессе измерения величины вольт-секундных площадей первой и второй исследуемых полуволн сигналов и максимальные (конечные) значения этих площадей;
Sпом - вольт-секундная площадь полуволны сигнала-помехи;
Р, Q - коэффициенты, определяющие часть амплитуды А1 или площади S1к, составляющую порог uпор1=P·A1 или Sпор1=Q·S1к;
Sпор1, Sпор2 - пороги формирования требуемых импульсов, причем Sпор1=Q·S1к; Sпор2=S1к;
Sпор1min, Sпор1max - минимальное и максимальное значения Sпор1;
Sпр.min - предельное минимальное допустимое значение вольт-секундной площади исследуемых полуволн сигналов;
Sx, Sхк - соответственно получаемые в процессе формирования величины дополнительного параметра и его максимальное (конечное) значение, причем Sx=(1+Q)·S2/2;
Sн - номинальное значение площади исследуемых полуволн сигналов;
Smin, Smax - соответственно минимальное и максимальное допустимые значения вольт-секундной площади полуволн исследуемых сигналов;
ΔS, α - абсолютная и относительная величины максимального отклонения площади исследуемых полуволн сигналов от Sн;
Тc, Ти - период следования сигналов соответственно датчика и сформированных импульсов;
Z - число возбудителей на роторе исследуемого объекта;
γ - относительная величина допуска на изменение Sхк;
w - число витков катушки датчика;
Ф - магнитный поток, в котором находится катушка;
R - отношение площадей первой и второй полуволн сигнала датчика.
Сущность предлагаемого изобретения поясняется фиг.1-6, на которых представлены:
фиг.1 - временные диаграммы формирования импульсов по способу-прототипу;
фиг.2 - временные диаграммы, иллюстрирующие влияние ΔS на Ти в способе-прототипе;
фиг.3 - временные диаграммы формирования импульсов по пункту 1 формулы предлагаемого способа;
фиг.4 - временные диаграммы формирования импульсов по пункту 2 формулы предлагаемого способа;
фиг.5 - временные диаграммы, иллюстрирующие независимость Ти от ΔS в предлагаемом способе;
фиг.6 - блок-схема одного из возможных устройств, реализуемых на основе предлагаемого способа формирования импульсов.
В приведенном на фиг.6 варианте реализации предлагаемого способа сигналы еc индукционного датчика частоты вращения поступают на входы блока 1 измерения S1, инвертора 4 сигналов и блока 6 управления. При этом в блоке 6 управления вырабатываются сигналы разрешения измерения S1, S2 и выдачи требуемых импульсов:
- разрешение измерения S1 при наличии на входе блока 6 первой полуволны сигнала (подается на блок 1);
- разрешение измерения S2 или Sx при наличии на входе блока 6 второй полуволны сигнала и при S1к>Sпр.min (подается на блок 5);
- разрешение выдачи требуемого импульса при S1к>Sпр.min (подается на блок 3).
В блоке 1 путем интегрирования производится измерение S1;
В блоке 2 запоминается значение S1к формируется порог Sпор1=Q·S1к.
В блоке 3 выполняется сравнение площадей S2 с Sпорi (по п.1 формулы) или Sхк с Sпор1 и Sпор2 (по п.2 формулы) и вырабатывается требуемый импульс.
Инвертор 4 изменяет полярность сигналов ес на противоположную с коэффициентом передачи, равным К=-1 (по п.1 формулы) или К=-(1+Q)/2 (по п.2 формулы). Если же из-за каких-либо конструктивных особенностей системы ротор-возбудители-датчик величина площади второй полуволны существенно отличается от площади первой полуволны сигнала датчика, то подбором коэффициента передачи инвертора 4 представляется возможным устранить влияние этого неравенства на формирование импульсов.
В блоке 5 путем интегрирования производится измерение S2 (по п.1 формулы) или Sx (по п.2 формулы).
Блоки 1 измерения S1 и 5 измерения S2 или Sx представляют собой интеграторы и могут быть выполнены на операционных усилителях, например на микросхеме 1401УД2А δКО.347.306-01ТУ [5].
Блок 2 запоминания S1к и формирования Sпор1 является амплитудным детектором с подключенным к нему резисторным делителем напряжения, причем амплитудный детектор может быть выполнен на микросхеме 1401УД2А.
Блок 3 сравнения вольт-секундных площадей и формирования выходных импульсов может быть реализован на компараторах, например 1401СА1 δКО.348.651-ОЗТУ, и одновибраторах, например 564АГ1 δКО.347.064-32ТУ.
Инвертор 4 сигналов является инвертирующим операционным усилителем, выполненным, например, на микросхеме 1401УД2А.
Блок 6 управления состоит из пороговых элементов, например компараторов 1401СА1, и аналоговых ключей, например 590КН9 δКО.347.000-10ТУ или 590КН13 δКО.347.000-16ТУ.
Выполненные по предлагаемому способу формирователи импульсов предназначены в основном для работы совместно с устройствами измерения частоты. Так, например, в тандеме с устройством, представленным в [6], они позволяют создавать помехоустойчивые высокоточные модули измерения и контроля частоты, которые могут быть использованы прежде всего в системах аварийной защиты энергонасыщенных объектов, таких, например, как жидкостные ракетные и газотурбинные авиационные двигатели [7]. При этом одним из источников помех могут быть электрические цепи (кабели) систем управления двигателем, по которым осуществляется подача мощных сигналов, управляющих исполнительными элементами двигателя (пироклапанами, электропневмоклапанами и др.).
Использование в данном случае предлагаемого способа формирования импульсов позволит значительно повысить эффективность аварийной защиты испытываемых объектов и стендов от разрушений.
ЛИТЕРАТУРА
1. Авторское свидетельство СССР №1550611, A1, H03K 5/24, G05B 1/01, опубл. 15.03.90 г.
2. Патент RU №2173022, С2, МПК7 Н03К 5/153, опубл. 27.08.2001 г.
3. Датчики теплофизических и механических параметров. Справочник. / Под общей редакцией Ю.Н.Коптева. Том 1, М., издательское предприятие журнала "Радиотехника", 1998 г, стр.52.
4. Датчики теплофизических и механических параметров. Справочник. / Под общей редакцией Ю.Н.Коптева. Том 2, М., издательское предприятие журнала "Радиотехника", 2000 г, стр.561, стр.616-618.
5. Интегральные микросхемы. Операционные усилители и компараторы. Справочник, том 12, изд. 2, Додека-21в, 2002 г.
6. Патент RU N 2300112, С2, МПК G01R 23/10, опубл. 27.05.2007.
7. Н.Н.Севрюгин, И.А.Потапов, А.Н.Попов, A.M.Цирихов «Опыт автоматизации процесса испытаний авиационных газотурбинных двигателей || Приборы и Системы. Управление, контроль, диагностика. 2001. N5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352057C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2010 |
|
RU2439791C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2523166C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399153C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2400929C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2465721C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2017 |
|
RU2647676C1 |
Предложенное изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода. Технический результат заключается в повышении помехоустойчивости, точности и надежности повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения. В способе измеряют и сравнивают вольт-секундные площади двух полуволн каждого двухполярного сигнала индукционного датчика частоты вращения, причем сначала измеряют площадь S1к первой полуволны и вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, затем измеряют площадь S2 второй полуволны и в процессе измерения S2: 1) сравнивают получаемые величины S2 с Snopl и при выполнении условия S2>Sпор1 формируют требуемый импульс или 2) вырабатывают дополнительный параметр Sx=(1+Q)·S2/2, сравнивают его с Sпор1, S1к и при выполнении условия Sпор1<Sхк<S1к формируют требуемый импульс. Вариант устройства, реализующего способ, содержит блок (1), в котором путем интегрирования производится измерение S1, в блоке (2) запоминается значение S1k и формируется порог, инвертор (4), блок (6) управления. 1 з.п. ф-лы, 6 ил., 1 табл.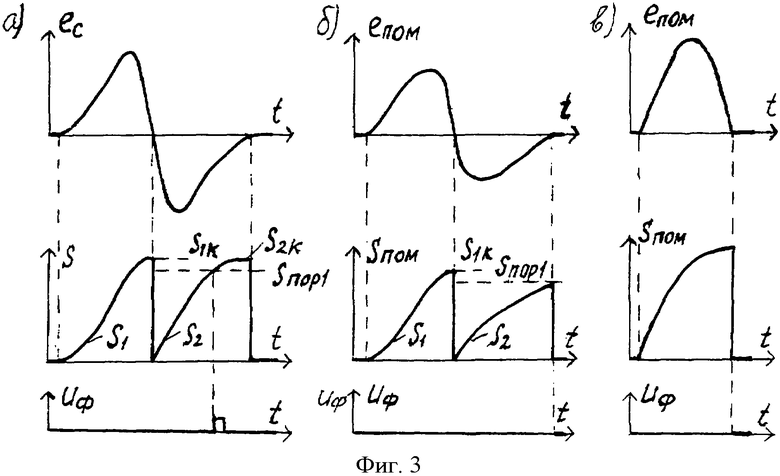
1. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют и сравнивают вольт-секундные площади двух соседних одинаковых по полярности полуволн двухполярных сигналов индукционного датчика частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине вольт-секундной площади исследуемых полуволн сигналов, затем измеряют вольт-секундную площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс, отличающийся тем, что в качестве первой измеряемой полуволны используют первую полуволну, а в качестве второй измеряемой полуволны - вторую (противоположной полярности) полуволну одного и того же двухполярного сигнала индукционного датчика частоты вращения, причем в процессе измерения вольт-секундной площади S1 первой полуволны сравнивают получаемые величины S1 с пороговым значением Sпр.min и в момент выполнения условия S1>Sпр.min вырабатывают разрешение на измерение вольт-секундной площади S2 второй (противоположной полярности) полуволны, которое отменяют в начале или после начала выдачи требуемого импульса, с поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса.
2. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения по п.1, отличающийся тем, что в процессе измерения вольт-секундной площади S2 второй (противоположной полярности) полуволны двухполярного сигнала индукционного датчика частоты вращения вырабатывают дополнительный параметр Sx=(1+Q)·S2/2, сравнивают его максимальную величину Sxk с пороговыми значениями Sпор1=Q·S1к и Sпор2=S1к и при выполнении условий S1к>Sпр.min, Sпор1<Sхк<Sпор2 (вместо условий S1к>Sпр.min, S2>Sпор1 по п.1) вырабатывают требуемый импульс.
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ОБОРОТОВ | 1999 |
|
RU2173022C2 |
| Пороговое устройство | 1988 |
|
SU1550611A1 |
| Преобразователь угла поворота вала в частоту следования импульсов | 1981 |
|
SU970419A1 |
| Формирователь импульсов для измерения частоты периодического сигнала | 1976 |
|
SU581579A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |

