Предлагаемое изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода.
Известен способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют и сравнивают вольт-секундные площади двух соседних одинаковых по полярности полуволн двухполярных сигналов индукционного датчика частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине вольт-секундной площади исследуемых полуволн сигналов, затем измеряют вольт-секундную площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс. Одновременно с измерением вольт-секундной площади S2 запоминают ее максимальное значение S2к, вырабатывают пороговое значение Sпор2=Q·S2к, необходимое для реализации следующего цикла формирования импульсов. С поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса. Способ нашел реализацию в устройстве [1].
Из известных наиболее близким по технической сущности является способ формирования импульсов из сигналов индукционных датчиков частоты вращения [2], согласно которому:
1. Измеряют и сравнивают вольт-секундные площади двух соседних полуволн противоположной полярности двухполярных сигналов индукционного датчика частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине вольт-секундной площади исследуемых полуволн сигналов, затем измеряют вольт-секундную площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс, причем в процессе измерения вольт-секундной площади S1 первой полуволны сравнивают получаемые величины S1 с пороговым значением Sпр.min и в момент выполнения условия S1>Sпр.min вырабатывают разрешение на измерение вольт-секундной площади S2 второй (противоположной полярности) полуволны, которое отменяют в начале или после начала выдачи требуемого импульса, с поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса.
2. В дополнение к п.1, что в процессе измерения вольт-секундной площади S2 второй (противоположной полярности) полуволны двухполярного сигнала индукционного датчика частоты вращения вырабатывают дополнительный параметр Sx=(1+Q)·S2/2, сравнивают его максимальную величину Sxk с пороговыми значениями Sпор1=Q·S1к и Sпор2=S1к и при выполнении условий S1к>Sпр.min, Sпор1<Sxк<Sпор2 (вместо условий S1к>Sпр.min, S2>Sпор1 по п.1) вырабатывают требуемый импульс.
На фиг.1 представлена осциллограмма выходного сигнала индукционного датчика частоты вращения. Индукционные датчики частоты вращения работают на основе закона Фарадея, согласно которому индуцированная ЭДС eс(t) определяется скоростью изменения магнитного поля Ф, сцепленного с катушкой из W витков [3]:
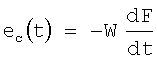 .
.
В рассматриваемом случае изменение магнитного поля вызывается пересечением силовых линий поля магнита датчика выступами вращающегося возбудителя [4]. При входе возбудителя в магнитное поле в катушке индуцируется первая полуволна сигнала, а при его выходе - вторая полуволна, имеющая противоположную полярность.
Вольт-секундная площадь S1к первой полуволны такого сигнала примерно равна аналогичной площади S2к второй (противоположной полярности) полуволны, а отношение этих площадей R=S1к/S2к близко к 1, не зависит от погрешности установки зазора между датчиком и возбудителем, характеристик самого возбудителя и остается постоянным в широком диапазоне частоты вращения.
В известном способе [2] анализу подлежат обе полуволны каждого двухполярного сигнала и формируется требуемый импульс при условии, что этот сигнал соответствует следующим требованиям:
1) сигнал должен быть двухполярным;
2) площадь S1к первой полуволны сигнала должна превышать Sпр.min;
3) вторая полуволна сигнала должна иметь полярность, противоположную полярности первой полуволны;
4) площадь S2к второй полуволны сигнала должна превышать порог Sпор1=Q·S1к, причем значение этого порога весьма высокое (близкое к S1к) - по п.1 формулы;
5) площадь S2к второй полуволны сигнала с небольшой погрешностью должна быть равной площади первой полуволны сигнала - по п.2 формулы.
Недостатком этого способа является низкая помехоустойчивость. Достаточно протяженная во времени низкочастотная двухполярная помеха даже малой амплитуды, например от сети питания переменного тока, может иметь значение вольт-секундной площади каждой из полуволн, близкое к сигналам индукционных датчиков частоты вращения. Фазовые и временные соотношения сигнала индукционного датчика частоты вращения и помехи произвольны. При этом результат измерения вольт-секундной площади первой полуволны сигнала индукционного датчика частоты вращения при условии одновременного действия помехи с вольт-секундной площадью Sп будет S1кп=S1к±Sп, а для второй полуволны противоположной
полярности S2кп=S2к±Sп. Разность S1кп-S2кп может достигать величины 2Sп. То есть для устойчивой работы необходимо, что бы вольт-секундная площадь помехи не превышала 0,5 S1к.
Кроме того, при действии импульсной помехи, совпадающей по времени появления с одной из полуволн сигнала индукционного датчика частоты вращения, условие 5 равенства с небольшой погрешностью площадей полуволн сигнала индукционного датчика частоты вращения не выполняется и сигнал не обнаруживается.
Техническим результатом предлагаемого способа является повышение помехоустойчивости.
Сущность предлагаемого способа заключается в оценке параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения и выработке по результатам оценки требуемого импульса. Согласно предлагаемому изобретению оценку параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения проводят путем сравнения сигнала индукционного датчика частоты вращения с половиной минимально возможной его амплитуды и в случае его превышения формируют интервал времени, обусловленный ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, затем сравнивают сигнал индукционного датчика частоты вращения с половиной минимально возможной амплитуды полуволны противоположной полярности и в случае его превышения вырабатывают требуемый импульс.
В предлагаемом способе, так же как и в прототипе, оценке подлежат параметры двух полуволн каждого двухполярного сигнала индукционного датчика частоты вращения. В заявляемом способе требуемый импульс вырабатывается при условии, что этот сигнал соответствует следующим требованиям:
1) сигнал должен быть двухполярным;
2) амплитуда первой полуволны сигнала должна превышать половину минимально возможной амплитуды сигнала индукционного датчика частоты вращения;
3) вторая полуволна сигнала должна появиться в интервале времени, обусловленном ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения;
4) вторая полуволна сигнала должна иметь полярность, противоположную полярности первой полуволны;
5) амплитуда второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения превышает половину своей минимально возможной амплитуды.
Сравнение амплитуд полуволн сигнала индукционного датчика частоты вращения с половиной их минимально возможной амплитуды позволяет исключить влияние на получаемый результат помех, амплитуда которых не превышает половины амплитуды сигнала индукционного датчика частоты вращения. Формирование интервала времени, обусловленного ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, в течение которого производится оценка амплитуды второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, позволяет исключить влияние на получаемый результат двухполярных импульсных помех, имеющих временные параметры, не совпадающие с временными характеристиками сигнала индукционного датчика частоты вращения.
Таким образом, предлагаемый способ обеспечивает технический эффект и позволяет повысить помехоустойчивость по отношению к низкочастотной двухполярной помехе при отношении амплитудных значений сигнала и двухполярной помехи больше двух независимо от длительности и частоты помехи. Способ не чувствителен к влиянию мощных импульсных однополярных помех большой амплитуды, совпадающих по времени с одной из полуволн сигнала индукционного датчика частоты вращения, так как выполнение условия превышения амплитуды полуволны сигнала половины минимально возможной амплитуды сигнала индукционного датчика частоты вращения не нарушается. Введение дополнительного временного ограничения на момент обнаружения факта превышения амплитуды второй полуволны сигнала заданного порога позволяет исключить ложные срабатывания в случае действия мощных двухполярных импульсных помех с интервалом следования импульсов, превышающим длительность одного двухполярного сигнала индукционного датчика частоты вращения.
На фиг.2 приведен вариант структурной схемы устройства формирования импульсов из сигналов индукционных датчиков частоты вращения, реализующего предлагаемый способ. Устройство состоит из источника опорного сигнала 1, инвертора 2, компараторов 3 и 4 и формирователя 5.
Выход источника опорного сигнала 1 соединен с первыми входами компараторов 3 и 4. Двухполярный сигнал индукционного датчика частоты вращения подается на второй вход компаратора 3 и через инвертор 2 на второй вход компаратора 4. Выход компаратора 3 подключен к управляющему входу компаратора 4, выход которого соединен с входом формирователя импульса 5.
Все элементы, входящие в состав устройства, могут быть реализованы в виде отдельных функциональных узлов или программным способом при использовании микроконтроллера, оснащенного компараторами и АЦП.
Работает устройство следующим образом. Источник опорного сигнала 1 устанавливает уровень срабатывания компараторов 3 и 4 равным половине минимально возможной амплитуды сигнала индукционного датчика частоты вращения. Входной сигнал индукционного датчика частоты вращения подается на вход компаратора 3 и через инвертор 2 на вход компаратора 4. Когда входной сигнал устройства становится больше напряжения, задаваемого источником опорного напряжения 1, компаратор 3 вырабатывает импульс, длительность которого равна ожидаемой длительности двухполярных импульсов индукционного датчика частоты вращения. Этот импульс поступает на управляющий вход компаратора 4, разрешая его работу. Если за время действия этого импульса компаратор 4 сработает, то по сигналу компаратора 4 формирователь импульсов 5 сформирует требуемый импульс.
Таким образом, при наличии во входном сигнале двухполярных импульсов индукционного датчика частоты вращения устройство их обнаруживает и вырабатывает требуемый импульс. В случае отсутствия во входном сигнале хотя бы одного из импульсов или при недостаточной амплитуде хотя бы одной полуволны один из компараторов 3 или 4 не срабатывает, и требуемый импульс формирователем 5 не вырабатывается. Тем самым повышается помехоустойчивость по отношению к низкочастотной двухполярной помехе и импульсным помехам.
Источники информации
1. Патент RU 2173022, C2, МПК7 H03K 5/153, опубл. 27.08.2001 г.
2. Патент RU 2352058, C1, МПК H03K 5/153, опубл. 10.04.2009 г.
3. Датчики теплофизических и механических параметров. Справочник. / Под общей редакцией Ю.Н. Коптева. Том 1, М., издательское предприятие журнала "Радиотехника", 1998 г., стр.52.
4. Датчики теплофизических и механических параметров. Справочник. / Под общей редакцией Ю.Н. Коптева. Том 2, М., издательское предприятие журнала "Радиотехника", 2000 г., стр.561, стр.616-618.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2523166C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2400929C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2010 |
|
RU2439791C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352057C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2465721C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2459351C1 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода. Технический результат заключается в повышении помехоустойчивости по отношению к низкочастотным периодическим двухполярным и импульсным помехам. Способ основан на оценке параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения и выработке по результатам оценки требуемого импульса. Согласно предлагаемому изобретению оценку параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения проводят путем сравнения сигнала индукционного датчика частоты вращения с половиной минимально возможной его амплитуды и в случае его превышения формируют интервал времени, обусловленный ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, затем сравнивают сигнал индукционного датчика частоты вращения с половиной минимально возможной амплитуды полуволны противоположной полярности и в случае его превышения вырабатывают требуемый импульс. 2 ил.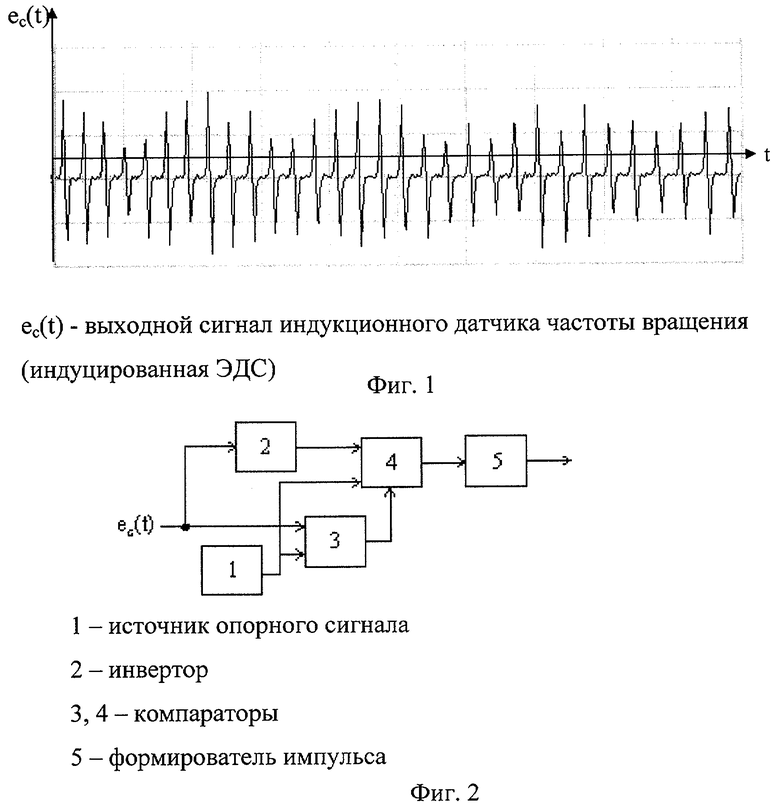
Способ формирования импульсов из сигналов индукционных датчиков частоты вращения, основанный на оценке параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения и выработке по результатам оценки требуемого импульса, отличающийся тем, что оценку параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения проводят путем сравнения сигнала индукционного датчика частоты вращения с половиной минимально возможной его амплитуды и в случае его превышения формируют интервал времени, обусловленный ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, затем сравнивают сигнал индукционного датчика частоты вращения с половиной минимально возможной амплитуды полуволны противоположной полярности, и в случае его превышения вырабатывают требуемый импульс.
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| Формирователь импульсов | 1987 |
|
SU1503061A1 |
| Устройство для формирования серий импульсов | 1982 |
|
SU1034162A1 |
| JP 4172744 A, 19.06.1992. | |||

