Предлагаемое изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода.
Известен способ формирования импульсов из сигналов индукционных датчиков частоты вращения [1], основанный на оценке параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения и выработке по результатам оценки требуемого импульса, при этом оценку параметров двух полуволн противоположной полярности каждого двухполярного сигнала индукционного датчика частоты вращения проводят путем сравнения сигнала индукционного датчика частоты вращения с половиной минимально возможной его амплитуды и в случае его превышения формируют интервал времени, обусловленный ожидаемым моментом появления максимума второй полуволны противоположной полярности сигнала индукционного датчика частоты вращения, затем сравнивают сигнал индукционного датчика частоты вращения с половиной минимально возможной амплитуды полуволны противоположной полярности, и в случае его превышения вырабатывают требуемый импульс.
Первым существенным недостатком способа [1] является низкая помехоустойчивость при формировании требуемых импульсов в широком диапазоне частоты исследуемых сигналов.
Этот недостаток обусловлен тем, что в рассматриваемом способе предусмотрена установка постоянных значений порогов формирования требуемых импульсов, величина которых равна половине возможной минимальной амплитуды сигналов датчика.
Индукционные датчики частоты вращения работают на основе закона Фарадея, согласно которому индуцированная ЭДС ес определяется скоростью изменения магнитного поля Ф, сцепленного с катушкой из w витков [2]
В рассматриваемом случае изменение магнитного поля вызывается пересечением силовых линий поля магнита датчика выступами вращающегося возбудителя [3]. При входе возбудителя в магнитное поле в катушке индуцируется первая полуволна сигнала, а при его выходе - вторая полуволна, имеющая противоположную полярность.
Индукционные датчики частоты вращения вырабатывают сигналы с возможной минимальной амплитудой при работе на низких частотах и устанавливаемые в способе [1] пороги формирования импульсов связаны именно с этой частотой. С повышением рабочей частоты увеличивается как амплитуда полезного сигнала, так и помех, обусловленных переходными процессами в цепях датчиков (фиг.1 описания рассматриваемого патента). При работе на высоких частотах эти помехи могут превысить установленные сравнительно низкие пороги формирования требуемых импульсов, что приведет к выработке ложных импульсов.
Вторым существенным недостатком способа [1] является низкая эффективность введенной защиты от помех, которые могут возникнуть в промежутках времени между сигналами датчика. С целью повышения помехоустойчивости в рассматриваемом способе формирования импульсов вырабатывается разрешение на прием сигнала в течение времени τp, величина которого должна задаваться исходя из максимальной длительности сигнала датчика, имеющей место на низких частотах этих сигналов. При работе на высоких частотах за интервал времени τp будет сформировано значительное количество требуемых импульсов, однако в это время защита от помех будет отсутствовать и возможно формирование ложных импульсов.
Третьим существенным недостатком рассматриваемого способа является то, что его использование целесообразно в ограниченном числе случаев, когда пауза между сигналами датчика значительно превосходит длительность этих сигналов, а это возможно, если ротор или диск, на котором установлены магнитные возбудители, имеет относительно большой диаметр и на нем установлено сравнительно малое число возбудителей. При большом числе возбудителей сигналы датчика следуют непрерывно один за другим и система измерения обладает высокой информативностью. Однако в этом случае предложенное в [1] временное ограничение не требуется.
Известен также способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором предусмотрено измерение частоты исследуемых сигналов, а также скорости ее изменения и в соответствии с результатом измерения устанавливают величины порогов формирования требуемых импульсов. При этом считают, что между амплитудой и частотой сигналов индукционных датчиков частоты вращения имеется однозначная линейная зависимость. По этому способу выполнено устройство [4].
Однако индукционные датчики частоты вращения имеют разные, существенно отличающиеся, амплитудно-частотные характеристики и к тому же амплитуда их сигналов значительно зависит от погрешности установки зазора между датчиком и возбудителями, имеющимися на роторе исследуемого агрегата.
В технических условиях на индукционные датчики частоты вращения обычно указываются гарантированные минимальные значения амплитуды сигналов, получаемые на предельных частотах рабочего диапазона этих датчиков [5].
Определение реальной амплитудно-частотной характеристики каждого датчика в системе датчик-ротор с возбудителями сопряжено с необходимостью частичного демонтажа системы измерения частоты вращения и включением в работу исследуемого агрегата, например авиационного двигателя, что на практике является недопустимым.
Кроме того, реализация способа формирования импульсов [4] связана с необходимостью измерять частоту вращения и скорость ее изменения, то есть выполнять весьма сложные операции, которые в последующей системе, принимающей сформированные импульсы, могут и отсутствовать. Например, в ряде систем телеметрический контроль частоты вращения выполняется путем записи меандра, образованного посредством деления частоты следования сформированных импульсов. В этом случае применение способа формирования импульсов [4] являлось бы неоправданно сложной задачей.
Поэтому предложенный в [4] способ формирования импульсов из сигналов индукционных датчиков частоты вращения представляется нерациональным.
Наиболее близким по технической сущности к заявленному способу является принятый за прототип способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором путем фильтрации сигналов датчика подавляют высокочастотные помехи, задают два разнополярных порога, равных
 ,
,
где Amin - возможная минимальная амплитуда полуволн сигналов датчика, γ<1 - коэффициент, значение которого определяется требованиями по помехоустойчивости формирования импульсов, причем полярность первого порога uпор1 совпадает с полярностью следующей первой по времени полуволны сигнала датчика, а полярность второго порога uпор2 - с полярностью второй полуволны сигнала датчика, при достижении сигналом первой полуволны первого порога uпор1 начинают формировать импульс и одновременно устанавливают второй порог uпор2, при достижении сигналом второй полуволны второго порога uпор2 заканчивают формирование импульса и устанавливают первый порог uпор1, при поступлении каждого следующего двухполярного сигнала индукционного датчика частоты вращения повторяют цикл формирования импульса. Способ-прототип нашел реализацию в устройстве [6].
Существенным недостатком рассматриваемого способа является низкая помехоустойчивость при формировании требуемых импульсов в широком диапазоне частоты исследуемых сигналов. Этот недостаток вызван тем, что в способе-прототипе, как и в аналоге [1], предусмотрена установка постоянных значений порогов формирования импульсов.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении помехоустойчивости формирования импульсов из сигналов индукционных датчиков частоты вращения.
Для достижения указанного технического результата в способе формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором путем фильтрации сигналов датчика подавляют высокочастотные помехи, задают два разнополярных порога, равных
 ,
,
где Amin - возможная минимальная амплитуда полуволн сигналов датчика, γ<1 - коэффициент, значение которого определяется требованиями по помехоустойчивости формирования импульсов, причем полярность первого порога uпор1 совпадает с полярностью следующей первой по времени полуволны сигнала датчика, а полярность второго порога uпор2 - с полярностью второй полуволны сигнала датчика, при достижении сигналом первой полуволны первого порога uпор1 начинают формировать импульс и одновременно устанавливают второй порог uпор2, при достижении сигналом второй полуволны второго порога uпор2 заканчивают формирование импульса и устанавливают первый порог uпор1, при поступлении каждого следующего двухполярного сигнала индукционного датчика частоты вращения повторяют цикл формирования импульса, в отличие от прототипа:
1. Измеряют амплитуду A(i) полуволны положительной полярности каждого очередного i-го сигнала индукционного датчика частоты вращения, сравнивают получаемое значение амплитуды A(i) с величиной Amin и в случае A(i)≥Amin для формирования импульсов вырабатывают два порога, следующих непосредственно за измеряемой полуволной и равных
 ,
,
если же A(i)<Amin, то устанавливают один из порогов, равных 
2. В дополнение к п.1 после каждого измерения амплитуды A(i) полуволны очередного i-го сигнала датчика определяют среднее значение Acp(i) амплитуды исследуемых полуволн сигналов, предшествующих (i+1)-му сигналу датчика, причем число m предшествующих сигналов или интервал времени τ, в течение которого должны поступать такие сигналы, задают предварительно исходя из возможной максимальной скорости изменения частоты исследуемых сигналов, при последующем определении порогов по формуле п.1 в качестве переменной A(i) используют соответствующее значение Acp(i).
В предлагаемом способе формирования импульсов из сигналов индукционных датчиков частоты вращения выполняется адаптивное изменение порогов uпор1,2 формирования импульсов: при отсутствии сигналов ее датчика или когда измеряемая амплитуда A(i) полуволны сигнала меньше величины Amin, устанавливают один из порогов, равных  . При повышении амплитуды полуволны сигнала и выполнении условия A(i)≥Amin имеет место адаптивное изменение порогов по формуле
. При повышении амплитуды полуволны сигнала и выполнении условия A(i)≥Amin имеет место адаптивное изменение порогов по формуле  .
.
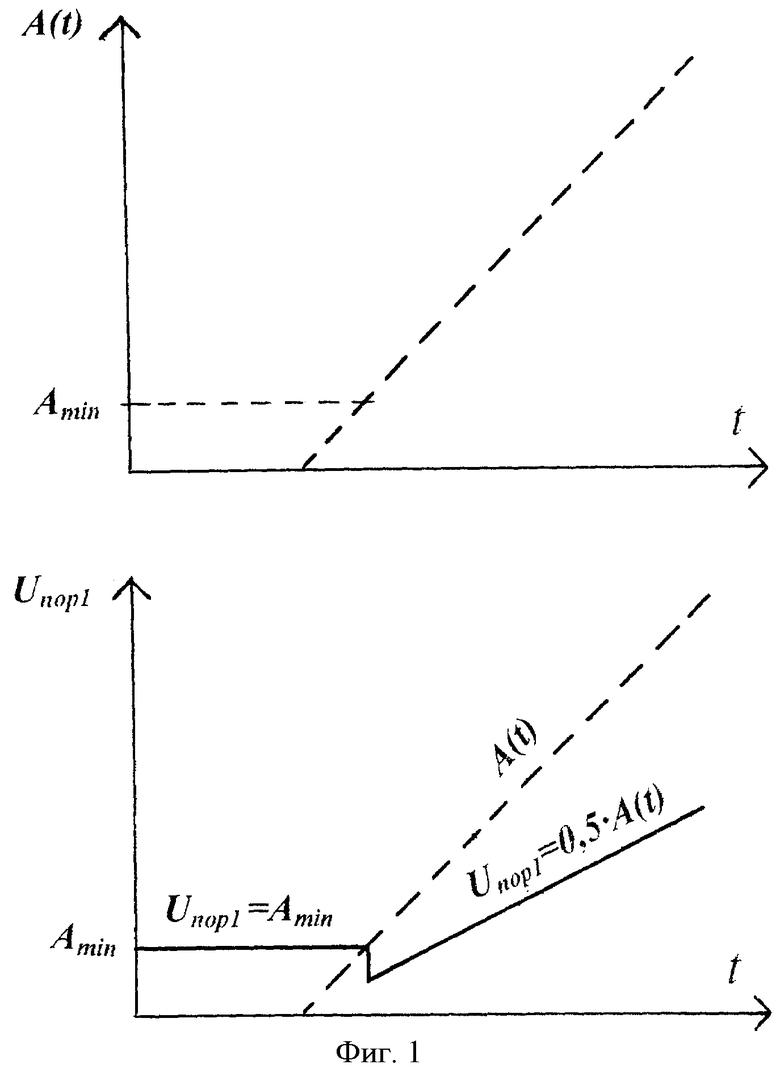
На фиг.1 показана зависимость порога формирования импульсов, например порога +uпор1, при γ=0,5 от амплитуды исследуемой полуволны сигнала индукционного датчика частоты вращения.
Такая зависимость величины порогов uпор1,2 от амплитуды сигнала позволяет исключить влияние помех, имеющих тенденцию роста с повышением частоты сигналов датчика.
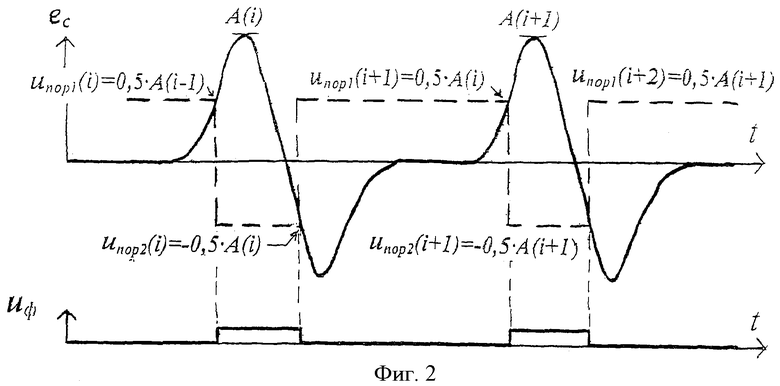
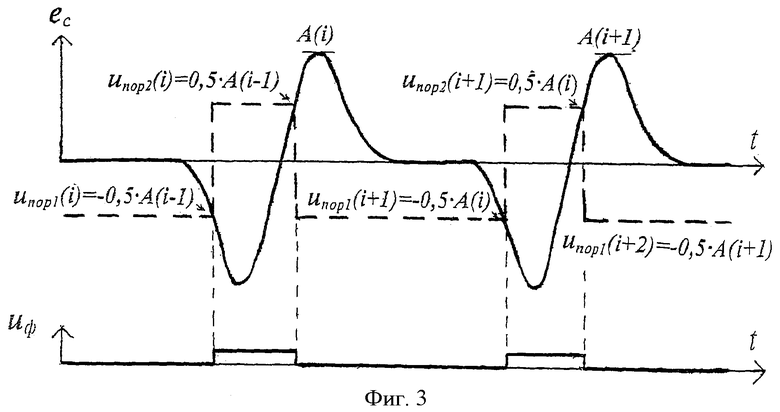
На фиг.2 и 3 представлены временные диаграммы сигналов ее индукционных датчиков частоты вращения, а также вырабатываемые пороги uпор1,2 и формируемые импульсы при измерении амплитуды соответственно первой и второй положительных полуволн сигнала.
Значение коэффициента γ определяется отношением уровня ожидаемых помех к амплитуде полуволн сигналов датчика. При этом предельная минимальная величина помех должна быть задана большей амплитуды неинформативного сигнала датчика от воздействия вибраций.
В п.2 формулы предусмотрено «скользящее» изменение порогов uпор1,2, когда при определении величины этих порогов используется среднее значение амплитуды нескольких исследуемых полуволн сигналов. Такой алгоритм определения порогов позволяет снизить влияние случайных значительных изменений амплитуды полуволн сигналов, вызванных помехами, на величину порогов uпор1,2.
Таким образом, все отличительные признаки, приведенные в двух пунктах формулы предлагаемого способа формирования импульсов из сигналов индукционных датчиков частоты вращения, позволяют сделать вывод о соответствии заявленного технического решения критерию «новизна». Эти признаки не выявлены в других технических решениях при изучении данной и смежных областей техники, позволяют получить новое качество и существенное отличие: обеспечивают высокую помехоустойчивость при формировании требуемых импульсов из сигналов индукционных датчиков частоты вращения.
На фиг.4 приведен вариант блок-схемы устройства формирования импульсов из сигналов индукционных датчиков частоты вращения, реализующего предлагаемый способ. Устройство состоит из фильтра нижних частот 1, блока амплитудного детектора 2, первого компаратора 3, первого аналогового переключателя 4, блока усилителей 5, второго аналогового переключателя 6, источника опорных напряжений 7 и второго компаратора 8.
Все элементы, входящие в состав устройства, могут быть реализованы в виде отдельных функциональных узлов или программируемым способом при использовании микроконтроллера, оснащенного аналого-цифровым преобразователем.
Устройство работает следующим образом. Сигналы ec индукционного датчика частоты вращения поступают на вход фильтра 1, в котором происходит подавление высокочастотных помех. После фильтрации сигналы ec передаются на первый вход амплитудного детектора блока 2 и второй вход компаратора 8. В амплитудном детекторе блока 2 производится измерение амплитуды первой (положительной полярности) полуволны сигнала ec. Полученное в результате измерения амплитуды напряжение uАД подается на первые входы компаратора 3 и переключателя 4. На второй вход компаратора 3 и третий вход переключателя 4 подаются от источника 7 опорные напряжения, равные соответственно uоп1=Amin и uоп2=Amin/γ.
В исходном состоянии рассматриваемого устройства, когда на его входе отсутствуют сигналы ec датчика или когда измеряемая амплитуда
полуволн сигналов ec меньше Amin, компараторы 3 и 8, а также переключатель 4 находятся в условно названном состоянии «Выключено». При этом сигнал uоп2 источника 7 поступает через переключатель 4 на вход блока 5, состоящего из неинвертирующего и инвертирующего операционных усилителей, имеющих коэффициенты передачи сигнала, равные γ<1, и вырабатывающих пороговые напряжения uпор1,2, в данном случае определяемые соответственно uпор1=+Amin и uпор2=-Amin.
Сигнал с выхода компаратора 8 устанавливает переключатель 6 в положение, при котором пороговое напряжение uпор1 через переключатель 6 подается на первый вход компаратора 8.
При поступлении на вход устройства первой (положительной полярности) полуволны сигнала ес, амплитуда которой больше Amin, происходит включение компараторов 3, 8 и переключателя 4. В этом случае сигнал uАД с выхода блока 2 проходит через переключатель 4 на вход блока усилителей 5, вырабатывающего напряжения, равные
 .
.
Одновременно с этим сигнал uф с выхода компаратора 8 устанавливает переключатель 6 в положение, при котором пороговое напряжение -uпор2 через этот переключатель поступает на первый вход компаратора 8.
При поступлении на вход устройства второй (отрицательной полярности) полуволны сигнала ec, амплитуда которой больше порога - uпор2, происходит установка переключателя 8 в состояние «Выключено» и на его первый вход подается через переключатель 6 пороговое напряжение
 .
.
Требуемым импульсом является выходной сигнал uф компаратора 8, причем формирование импульса uф начинается в момент включения компаратора 8 и заканчивается при выключении этого компаратора.
С поступлением очередного двухполярного сигнала индукционного датчика частоты вращения цикл формирования требуемого импульса повторяется.
Амплитудный детектор блока 2 может быть построен на операционном усилителе, диоде и конденсаторе. Кроме того, для подразряда конденсатора амплитудного детектора перед каждым новым измерением амплитуды в блок 2 должны входить ключ, резистор и одновибратор, запускаемый при включении компаратора 8.
Работа амплитудного детектора, аналогичного детектору блока 2, а также возможная элементная база для реализации рассматриваемого устройства приведены в описании патента [7]. «Скользящее» изменение порогов uпор1,2, предусмотренное п.2 формулы, может быть выполнено вводом в блок усилителей 5 RC-фильтров.
Предлагаемый способ формирования импульсов из сигналов индукционных датчиков частоты вращения, как и способ-прототип [6]:
1) формирует требуемые импульсы при условии, что:
- исследуемые сигналы двухполярные;
- амплитуда полуволн сигналов больше порогов uпор1.2 формирования импульсов;
2) помехоустойчив по отношению к высокочастотным помехам;
3) позволяет в зависимости от уровня помех устанавливать необходимые величины порогов формирования импульсов, например, в пределах 0,4-0,8 от амплитуды полуволн сигналов ec датчика.
Основными преимуществами предлагаемого способа формирования импульсов из сигналов индукционных датчиков частоты вращения перед рассмотренными аналогами и прототипом являются:
1) адаптивное к амплитуде полуволн сигналов ec изменение порогов формирования импульсов по зависимости  . При этом изменение указанных порогов может быть «скользящим», то есть пороги могут изменяться плавно с учетом изменений амплитуды полуволн нескольких сигналов ec;
. При этом изменение указанных порогов может быть «скользящим», то есть пороги могут изменяться плавно с учетом изменений амплитуды полуволн нескольких сигналов ec;
2) весьма высокие пороги формирования импульсов, равные uпор1,2=±Amin, при отсутствии сигналов ec или при амплитуде их полуволн, меньшей Amin (так как в данном случае коэффициент γ=1).
Таким образом, предлагаемый способ обеспечивает повышенную помехоустойчивость формирования импульсов из сигналов индукционных датчиков частоты вращения.
Выполненные по предлагаемому способу формирователи импульсов могут быть использованы прежде всего в системах аварийной защиты энергонасыщенных объектов, таких, например, как жидкостные ракетные и газотурбинные авиационные двигатели [8]. Использование в данном случае предлагаемого способа позволит повысить эффективность аварийной защиты испытываемых объектов и стендов от разрушений.
ЛИТЕРАТУРА
1. Патент RU №2399153 С1, МПК Н03К 5/153, опубл. 10.09.2010 г.
2. Датчики теплофизических и механических параметров.
Справочник. / Под общей редакцией Ю.Н.Коптева. Том 1, М., издательское предприятие журнала "Радиотехника", 1998 г., стр.52.
3. Датчики теплофизических и механических параметров.
Справочник. / Под общей редакцией Ю.Н.Коптева. Том 2, М., издательское предприятие журнала “Радиотехника", 2000 г., стр.561, стр.616-618.
4. Патент RU №2399154 С1, МПК Н03К 5/153, опубл. 10.09.2010 г.
5. Преобразователь частоты вращения ОГ 018. Технические условия Вт2.780.018ТУ.
6. Патент RU N2343490 С2, МПК G01P 3/489, опубл. 10.01.2009.
7. Патент RU №2352059 С1, МПК Н03К 5/153, опубл. 10.04.2009 г.
8. Н.Н.Севрюгин, И.А.Потапов, А.Н.Попов, A.M.Цирихов «Опыт автоматизации процесса испытаний авиационных газотурбинных двигателей». // Приборы и Системы. Управление, контроль, диагностика. 2001. N5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352057C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2010 |
|
RU2439791C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399153C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2523166C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2006 |
|
RU2343490C2 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2459351C1 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода. Техническим результатом является повышение помехоустойчивости формирования импульсов. Способ содержит следующие шаги: измеряют амплитуду A(i) полуволны положительной полярности каждого очередного i-го сигнала индукционного датчика частоты вращения и в случае A(i)≥Amin для формирования импульсов вырабатывают два разнополярных порога, следующих непосредственно за измеряемой полуволной и равных  , в случае A(i)<Amin устанавливают один из порогов, равных uпорт1,2(i+1)=±Amin, где Amin - возможная минимальная амплитуда полуволн сигналов датчика, коэффициент γ<1, при достижении сигналом первой полуволны первого порога uпорт1 начинают формировать импульс, при достижении сигналом второй полуволны второго порога uпорт2 заканчивают формирование импульса. При поступлении каждого следующего сигнала датчика повторяют цикл формирования требуемого импульса. 1 з.п. ф-лы, 5 ил.
, в случае A(i)<Amin устанавливают один из порогов, равных uпорт1,2(i+1)=±Amin, где Amin - возможная минимальная амплитуда полуволн сигналов датчика, коэффициент γ<1, при достижении сигналом первой полуволны первого порога uпорт1 начинают формировать импульс, при достижении сигналом второй полуволны второго порога uпорт2 заканчивают формирование импульса. При поступлении каждого следующего сигнала датчика повторяют цикл формирования требуемого импульса. 1 з.п. ф-лы, 5 ил.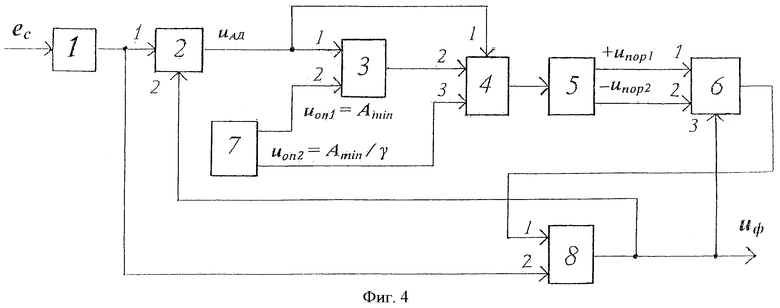
1. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором путем фильтрации сигналов датчика подавляют высокочастотные помехи, задают два разнополярных порога, равных uпор1,2=±γ·Amin, где Amin - возможная минимальная амплитуда полуволн сигналов датчика; γ<1 - коэффициент, значение которого определяется требованиями по помехоустойчивости формирования импульсов, причем полярность первого порога uпор1 совпадает с полярностью следующей первой по времени полуволны сигнала датчика, а полярность второго порога uпор2 - с полярностью второй полуволны сигнала датчика, при достижении сигналом первой полуволны первого порога uпор1 начинают формировать импульс и одновременно устанавливают второй порог uпор2, при достижении сигналом второй полуволны второго порога uпор2 заканчивают формирование импульса и устанавливают первый порог uпор1, при поступлении каждого следующего двухполярного сигнала индукционного датчика частоты вращения повторяют цикл формирования импульса, отличающийся тем, что измеряют амплитуду A(i) полуволны положительной полярности каждого очередного i-го сигнала индукционного датчика частоты вращения, сравнивают получаемое значение амплитуды A(i) с величиной Amin и в случае A(i)≥Amin для формирования импульсов вырабатывают два порога, следующих непосредственно за измеряемой полуволной и равных uпор1,2=±γ·A(i), если же A(i)<Amin, то устанавливают один из порогов, равных uпор1,2=±A(i).
2. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения по п.1, отличающийся тем, что после каждого измерения амплитуды A(i) полуволны очередного i-го сигнала датчика определяют среднее значение Acp(i) амплитуды исследуемых полуволн сигналов, предшествующих (i+1)-му сигналу датчика, причем число m предшествующих сигналов или интервал времени τ, в течение которого должны поступать такие сигналы, задают предварительно, исходя из возможной максимальной скорости изменения частоты исследуемых сигналов, при последующем определении порогов по формуле п.1 в качестве переменной A(i) используют соответствующее значение Acp(i).
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399153C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2006 |
|
RU2343490C2 |
| ВСЕСОЮЗНАЯ ^ПДТЕШЮ^-ТЕХНй^ЕЛ^й! | 0 |
|
SU341445A1 |
| US 5446322 A, 29.08.1995. | |||

