Предлагаемое изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода.
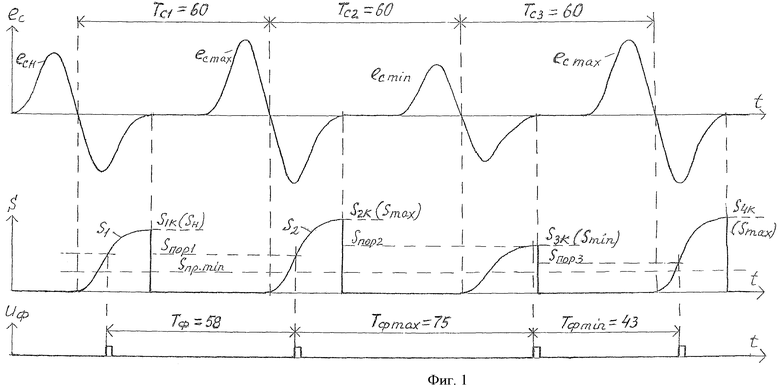
Известен способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют и сравнивают вольт-секундные площади двух соседних одинаковых по полярности полуволн двухполярных сигналов индукционного датчика частоты вращения (далее для сокращения текста вместо выражения «вольт-секундная площадь» используется слово «площадь», вместо «индукционный датчик частоты вращения» - слово «датчик»), причем сначала измеряют площадь S1 первой полуволны (фиг.1), запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпop1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине площади исследуемых полуволн сигналов, затем измеряют площадь S2 второй полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс. Одновременно с измерением площади S2 запоминают ее максимальное значение S2к, вырабатывают пороговое значение Sпор2=Q·S2к, необходимое для реализации следующего цикла формирования импульсов. С поступлением каждого нового двухполярного сигнала датчика повторяют процесс формирования требуемого импульса. Этот способ-аналог нашел реализацию в устройстве [1].
Первым существенным недостатком способа-аналога является значительная погрешность в повторении формируемыми импульсами uф длительности периодов следования сигналов ec датчиков.
Такая погрешность обусловлена тем, что при наличии отклонений ΔS площади исследуемых полуволн сигналов от ее номинального значения Sн в рассматриваемом способе формируются импульсы uф, периоды Тф следования которых не равны соответствующим периодам Tc сигналов датчиков (фиг.1). Разница ΔT длительностей этих периодов зависит от величины ΔS, причем максимальное значение периода Тфмах имеет место, когда за полуволной с площадью Sмax следует полуволна с площадью Smin, а минимальное значение периода Тфmin - когда за полуволной с площадью Smin следует полуволна с площадью Sмах. При построении графиков фиг.1 принято значение коэффициента Q=5/8=0.625. Числа, указанные на графиках, представляют собой условные единицы времени.
Вторым существенным недостатком рассматриваемого способа является низкая помехоустойчивость формирования требуемых импульсов. Этот недостаток вызван тем, что процесс формирования импульсов не защищен от воздействия однополярных сигналов-помех, площадь Sпом которых превышает пороговые значения Sпр.min и Sпор1. Такие помехи, имея одинаковую полярность с исследуемыми полуволнами сигналов, приводят к формированию рассматриваемым способом ложных импульсов.
Кроме того, индукционные датчики частоты вращения вырабатывают двухполярные сигналы, а в способе-аналоге формируются импульсы при наличии однополярных сигналов, то есть информация о наличии второй полуволны (противоположной полярности) не учитывается, что снижает достоверность (надежность) формирования импульсов.
Перечисленные выше недостатки способа-аналога приводят к понижению точности, помехоустойчивости и надежности повторения формируемыми импульсами uф длительности периодов следования сигналов ec датчиков.
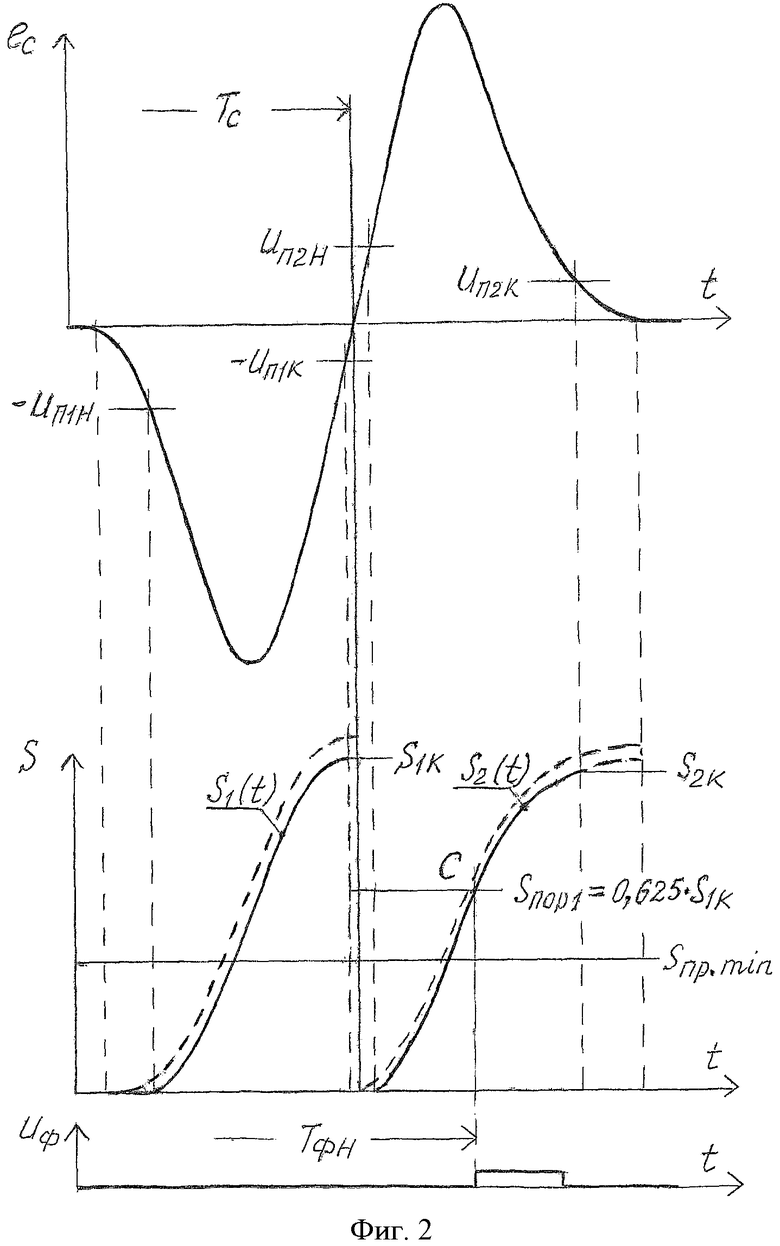
Наиболее близким по технической сущности к заявленному способу является способ [2] формирования импульсов из сигналов датчиков, в котором измеряют площади первой и второй (противоположной полярности) полуволн каждого двухполярного сигнала датчика (фиг.2), причем сначала измеряют площадь S1 первой полуволны, запоминают ее максимальное значение S1к, вырабатывают пороговое значение Sпор1=Q·S1к, где Q<1, сравнивают S1к с пороговым значением Sпр.min, равным предельной минимальной допустимой величине площади исследуемых полуволн сигналов, в процессе измерения площади S1 первой полуволны сравнивают получаемые величины S1 с пороговым значением Sпр.min и в момент выполнения условия S1>Sпр.min вырабатывают разрешение на измерение площади S2 второй (противоположной полярности) полуволны, которое отменяют в начале или после начала выдачи требуемого импульса, затем измеряют площадь S2 второй (противоположной полярности) полуволны, в процессе измерения сравнивают получаемые величины S2 с пороговым значением Sпор1 и при выполнении условий S1к>Sпр.min, S2>Sпор1 вырабатывают требуемый импульс, с поступлением каждого нового двухполярного сигнала датчика повторяют процесс формирования требуемого импульса.
Первым существенным недостатком способа-прототипа является значительная погрешность в повторении формируемыми импульсами uф длительности периодов следования сигналов еc датчика, что вызвано следующим.
Обычно измерение площади S каждой полуволны сигнала датчика начинают и заканчивают при достижении сигналом полуволны заданных порогов uпн начала и uпк окончания измерения (фиг.2). Причем величины таких порогов определяют исходя из ожидаемых уровней амплитуды помех, которые могут действовать в цепях сопряжения датчика с формирователем требуемых импульсов, или принимают равными 30÷50% от минимального значения амплитуды исследуемых полуволн сигналов [3].
Такие помехи могут накладываться на полуволны исследуемых сигналов и приводить к случайным погрешностям в измерении площадей этих полуволн. Полную погрешность ΔSi измерения площади каждой i-й (первой или второй) полуволны сигнала можно представить состоящей из трех составляющих:

где: ΔSi - полная погрешность измерения площади i-й полуволны сигнала;
ΔSiн - погрешность, обусловленная смещением начала измерения;
ΔSiнк - погрешность, вызванная помехами, действующими между началом и окончанием измерения;
ΔSiк - погрешность, обусловленная смещением окончания измерения.
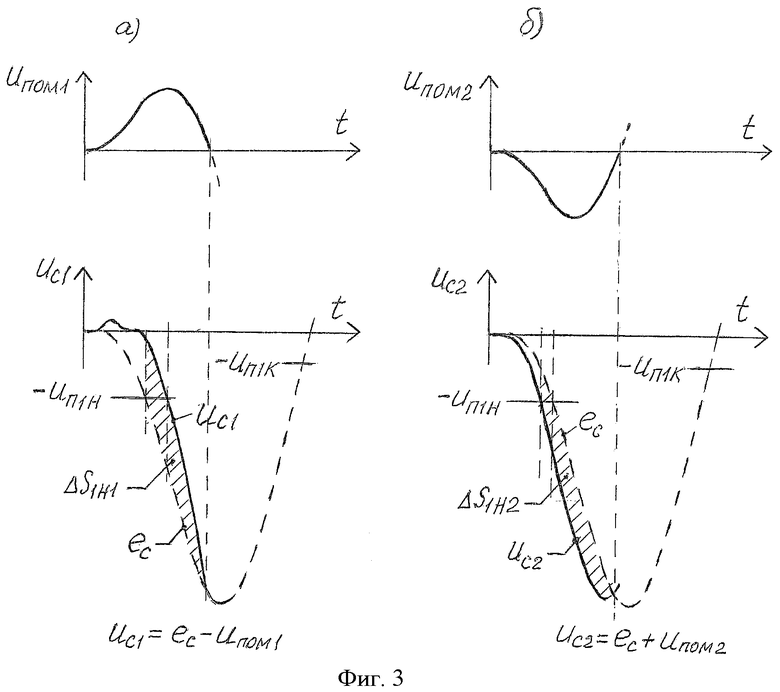
В качестве примера на фиг.3 показано, как сигнал помехи uпом может влиять на смещение начала измерения площади, обуславливая возникновение погрешности ΔS1н. При случайном вычитании сигнала помехи uпом1 из сигнала ec датчика (фиг.3а) измерение площади первой полуволны начинается с некоторым запаздыванием и результат измерения площади уменьшается на величину ΔS1н1, отмеченную заштрихованной частью фиг.3а. При случайном суммировании сигнала помехи uпом2 с сигналом ec датчика (фиг.3б) имеет место более раннее измерение площади первой полуволны и возникает погрешность измерения ΔS1н2.
Аналогичным образом возникают погрешности ΔSiк.
В способе-прототипе [2] требуемый импульс формируется при выполнении основного условия:

На графиках фиг.2 показана точка С пересечения порога Sпор1 (Q=5/8=0,625) с зависимостью S2(t). При этом период следования сформированных импульсов uф будет иметь номинальное значение Тфн, равное периоду Тс следования сигналов ес датчика.
В условиях воздействия помех максимальное значение площади первой полуволны определится как S1к±ΔS1 и соответственно пороговое значение будет равно:

При этом измеряемая площадь второй полуволны сигнала в момент выполнения условия (2), то есть в момент начала формирования импульса, будет равна S2=S2фи и с учетом воздействия помех определится выражением:

Подставляя (4) и (3) с учетом (1) в (2) получим условие формирования импульсов по способу [2] при воздействии помех:

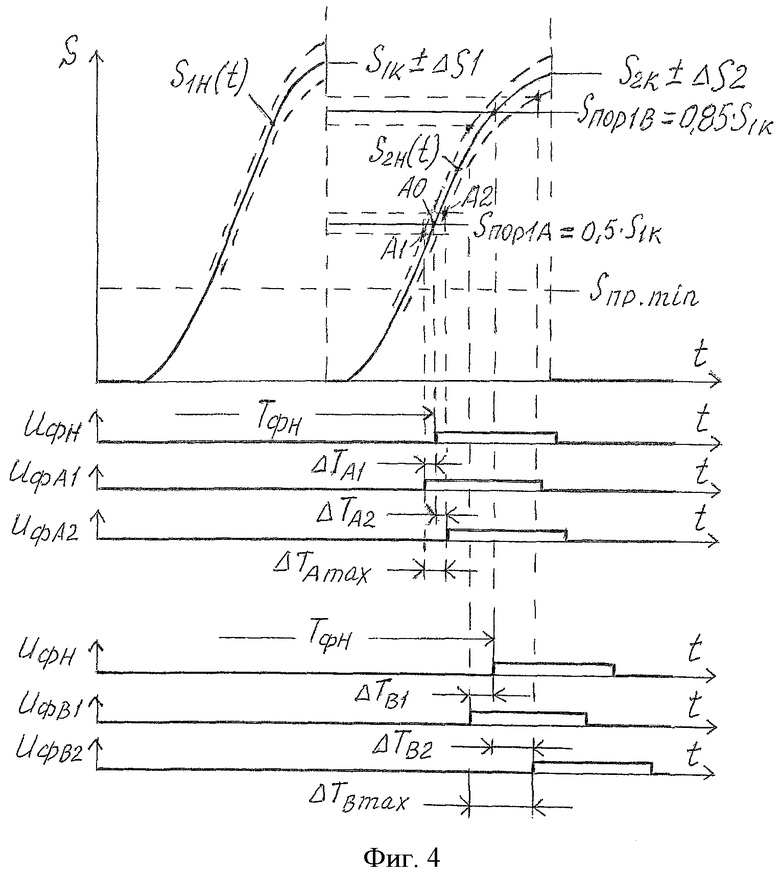
На графиках фиг.4 показаны номинальные (без учета влияния помех) зависимости площадей S1н(t) первой и S2н(t) второй полуволн, пороги формирования импульсов Sпор1A=0,5·S1к, Sпор1B=0,85·S1к (отмечены сплошными линиями), а также их предельные возможные значения, обусловленные воздействием помех (отмечены штриховыми линиями).
Как следует из графиков фиг.4, условие равенства (5) выполняется в зоне множества точек Aj пересечения порога Sпор1A (3) с функцией S2(t) (4). Одной из двух предельных возможных точек такого пересечения является точка А1, где порог Sпор1A имеет минимальное значение, а функция S2(t) - максимальное. При этом происходит более раннее формирование требуемого импульса и его период следования Тфн сокращается на величину ΔТА1.
Второй предельной точкой является точка А2, полученная при максимальном значении порога Sпор1A и минимальной величине функции S2(t). В этом случае период Тфн следования сформированных импульсов будет увеличен на величину ΔТА2.
В рассматриваемом случае для оценки погрешности повторения периода следования сигналов еc датчика сформированными импульсами uф используем максимальное значение суммы погрешностей ΔТAmax=ΔТА1+ТA2.
Аналогичным образом для случая, когда Q=0,85, получена погрешность ΔТBmах, которая имеет значительно большую величину, чем погрешность ΔТAmах.
Сравнивая погрешности ΔТAmах и ΔТBmах, полученные соответственно при Q=0,5 и Q=0,85, приходим к выводу:
1. Основной целью способов [1], [2] формирования импульсов из сигналов датчиков являлось повышение помехоустойчивости путем повышения порога формирования импульсов Sпор1=Q·S1к вплоть до принятия значения Q=0,9. Однако по мере приближения величины коэффициента Q к 1 в условиях воздействия помех существенно повышается погрешность повторения периода сигналов ec сформированными импульсами uф. Так, например, при Q=0,5 имеется ΔТAmах=8 условных единиц времени, в то время как при Q=0,85 получено ΔТBmах=23, то есть ΔТBmах>ΔТAmах (фиг.4).
В связи с этим рекомендуемым является порог формирования импульсов, равный Sпор1=(0,3÷0,75)·S1к.
2. Погрешность ΔT повторения периодов следования сигналов ес датчика сформированными импульсами uф в способе [2] зависит от большого числа случайных погрешностей измерения и сравнения площадей, то есть ΔT=φ(ΔS1н1, ΔS1нк1, ΔS1к1, ΔSн2, ΔSнк2), что и приводит к существенному снижению точности формирования импульсов.
Вторым существенным недостатком способа-прототипа [2] является сложность алгоритма формирования импульсов: помимо измерения площадей двух полуволн сигнала в каждом цикле формирования импульса необходимо запоминать максимальные значения S1к площади первой полуволны, формировать вспомогательный порог Sпор1, вырабатывать разрешение на измерение площади второй полуволны сигнала.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении точности повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения, а также в упрощении алгоритма формирования импульсов.
Для достижения указанного технического результата в способе формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют вольт-секундные площади первой и второй (противоположной полярности) полуволн каждого двухполярного сигнала индукционных датчиков частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, в отличие от прототипа:
1. Предварительно задают пороги формирования импульсов, равные Sпф1=(0,3-0,75)·Sпр.min1 и Sпф2=(0,3-0,75)·Sпр.min2, где Sпр.min1 и Sпр.min2 - предельные минимальные допустимые величины вольт-секундных площадей соответственно первой и второй полуволн сигналов, в процессе измерения сравнивают получаемые величины S1 с пороговым значением Sпф1 и в момент выполнения условия S1≥Sпф1 начинают вырабатывать требуемый импульс, после этого в процессе измерения площади S2 второй (противоположной полярности) полуволны сравнивают получаемые величины S2 с пороговым значением Sпф2 и при выполнении условия S2≥Sпф2 заканчивают формирование требуемого импульса, с поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса.
2. В дополнение к п.1, в момент начала или окончания формирования требуемого импульса вырабатывают второй требуемый импульс, имеющий постоянную длительность.
3. В дополнение к п.1, исследуемые сигналы отфильтровывают от высокочастотных помех и реализуют операции по формированию требуемых импульсов из отфильтрованных сигналов.
В отличие от способа-прототипа [2] в предлагаемом способе формирования импульсов из сигналов датчиков отсутствуют операции запоминания максимального значения S1к площади первой полуволны сигнала, формирования порогового значения Sпор1, выработки разрешения на измерение площади S2 второй полуволны сигнала, что позволило существенно упростить алгоритм и условие (5) формирования импульсов и тем самым сократить количество погрешностей при измерении площадей, повысить точность повторения периодов следования сигналов ec датчиков формируемыми импульсами uф.
В новом способе в процессе измерения площади первой полуволны сигнала (фиг.5) получаемые величины S1 сравнивают с порогом формирования импульсов Sпф1=(0,3-0,75)·Sпр.min1, который заранее определяется и задается в виде постоянного коэффициента. В момент выполнения условия S1≥Sпф1 начинают формировать требуемый импульс.
При воздействии помех измеряемая площадь первой полуволны будет определяться как  , где S1н - номинальное (без учета влияния помех) значение площади первой полуволны и условием начала формирования требуемого импульса будет:
, где S1н - номинальное (без учета влияния помех) значение площади первой полуволны и условием начала формирования требуемого импульса будет:

Аналогичным образом определяется условие окончания формирования требуемого импульса:

При этом существенно снижаются погрешности ΔТ (ΔТпФ и ΔТзф) повторения периода Тс сигналов ес датчика сформированными импульсами uф (фиг.5), так как при формировании начала и окончания требуемого импульса выполняется сравнение текущего значения площади первой и второй полуволн сигнала с постоянными величинами соответственно Sпф1 и Sпф2 и, кроме того, в условия (6) и (7) формирования фронтов импульса uф не входят погрешности ΔSiк.
Длительность τф сформированных импульсов uф зависит не столько от наличия помех, сколько от частоты исследуемых сигналов eс: она всегда пропорциональна периоду этих сигналов. Однако в большинстве случаев применения устройств, реализованных на основе рассматриваемого способа, требуется, чтобы сформированные импульсы имели постоянную длительность. Эту задачу и решает п.2 формулы.
Пункт 3 формулы предусматривает дополнительную фильтрацию исследуемых сигналов ec датчика от высокочастотных помех, которые при малой длительности имеют большую амплитуду.
Таким образом, все отличительные признаки, приведенные в трех пунктах формулы предлагаемого способа формирования импульсов из сигналов индукционных датчиков частоты вращения, позволяют сделать вывод о соответствии заявленного технического решения критерию «новизна». Эти признаки не выявлены в других технических решениях при изучении данной и смежных областей техники, позволяют получить новое качество и существенное отличие: обеспечивают повышенную точность повторения формируемыми импульсами uф длительности периодов следования сигналов ec индукционных датчиков частоты вращения, а также существенно упрощают алгоритм формирования требуемых импульсов.
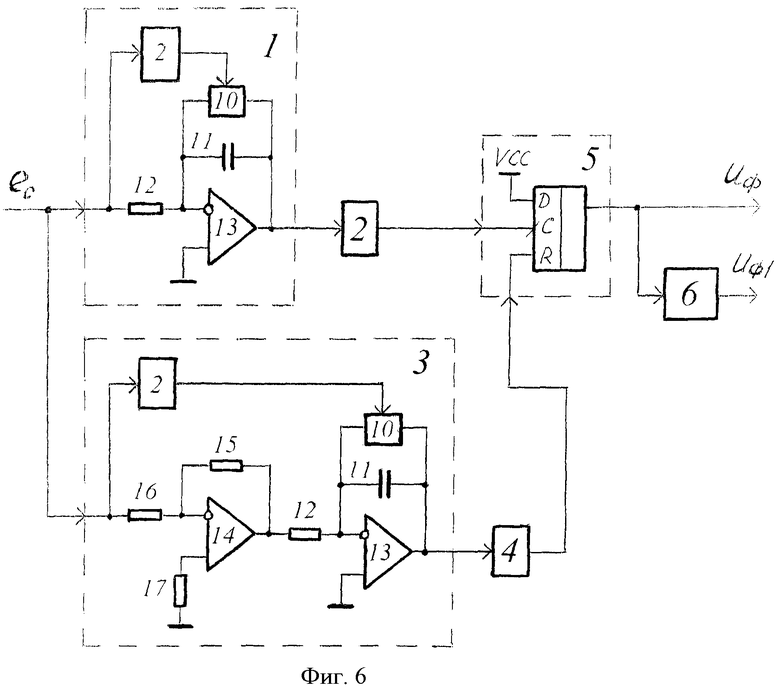
В качестве примера реализации предлагаемого способа на фиг.6 представлена блок-схема аналогового устройства формирования импульсов из сигналов ec датчиков.
Рассматриваемое устройство состоит из измерителей 1 и 3 площади полуволн сигнала, пороговых элементов 2 и 4, триггера 5 и одновибратора 6. Каждый измеритель состоит из порогового элемента 2, ключа 10 и интегратора, выполненного на конденсаторе 11, резисторе 12 и операционном усилителе (ОУ) 13. Кроме того, в состав измерителя 3 входит инвертирующий усилитель, реализованный на ОУ 14 и резисторах 15, 16 и 17.
Сигнал ec датчика поступает на входы измерителей 1 и 3. При этом в измерителе 1 путем интегрирования вырабатывается напряжение uинт1, величина которого пропорциональна площади S1 первой полуволны. В процессе измерения S1 напряжение uинт1 сравнивается с порогом включения элемента 2 uпф1, эквивалентного площади Sпф1. При достижении напряжением uинт1 величины порога uпф1 включается пороговый элемент 2 и сигнал с его выхода устанавливает триггер 5 в состояние логической «1».
Аналогичным образом измеритель 3 вырабатывает напряжение uинт2, эквивалентное площади S2 второй полуволны сигнала. При достижении сигналом uинт2 уровня uпф2, эквивалентного Sпф2, включается пороговый элемент 4 и происходит установка триггера 5 в состояние логического «0». Сигнал с выхода триггера 5 является требуемым импульсом.
На одном из фронтов переключения триггера 5 происходит запуск одновибратора 6, который формирует второй выходной импульс устройства, имеющий постоянную длительность.
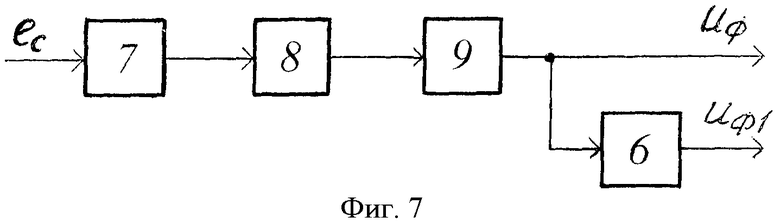
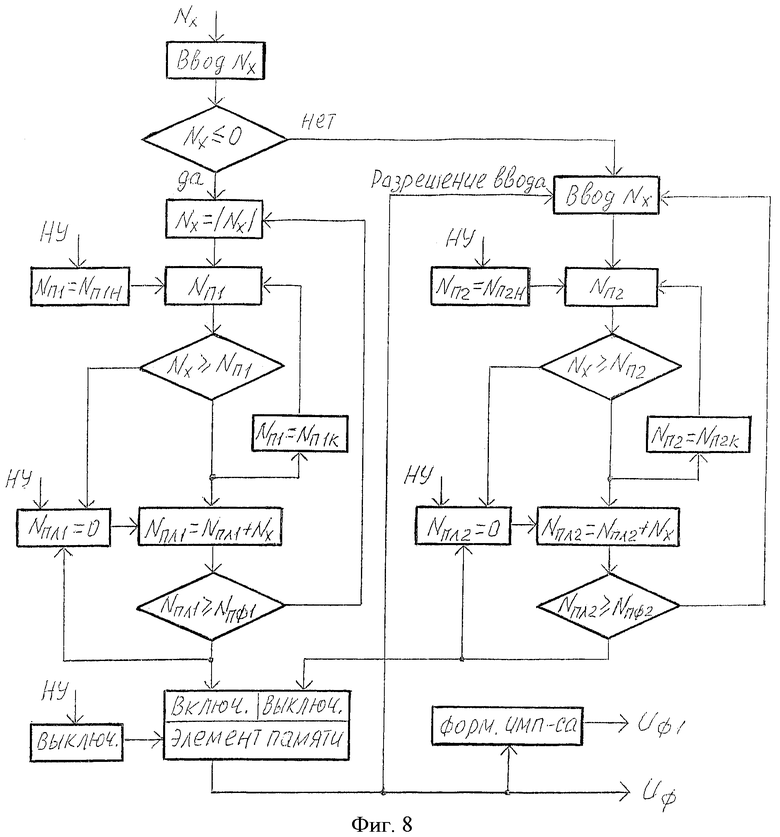
Другим примером реализации предлагаемого способа является цифровое устройство формирования импульсов из сигналов датчиков, блок-схема которого показана на фиг.7. Компонентами этой схемы являются фильтр низкой частоты (ФНЧ) 7, аналого-цифровой преобразователь (АЦП) 8, микропроцессор 9 и одновибратор 6. На фиг.8 представлена блок-схема одного из возможных алгоритмов формирования требуемых импульсов, реализуемого этим устройством.
ФНЧ 7 предварительно удаляет из частотного спектра сигналов, поступающих на вход устройства, высокочастотные составляющие, присущие помехам.
АЦП 8 периодически вырабатывает числа Nx, пропорциональные величине отфильтрованного сигнала ec датчика. Эти числа поступают на вход микропроцессора 9, в память которого предварительно введены значения шести порогов:
- пороги Nп1н и Nп1к, Nп2н и Nп2к - эквивалентные порогам uп1н и uп1к, uп2н и uп2к начала и окончания измерения площади соответственно первой и второй полуволн сигнала ес;
- пороги Nпф1 и Nпф2 - эквивалентные порогам Sпф1 начала и Sпф2 окончания формирования требуемого импульса uф.
В начале реализации алгоритма формирования импульсов выполняется обнуление регистров, предназначенных для хранения текущих значений чисел Nпл1 и Nпл2, образующихся в процессе суммирования чисел Nx и представляющих собой площадь соответственно первой и второй полуволн сигнала.
Алгоритм формирования импульсов фиг.8 предусматривает раздельное суммирование положительных и отрицательных чисел Nx, сравнение их сумм Nпл1 и Nпл2 с заданными порогами соответственно Nпф1 и Nпф2 и выработку команд включения и выключения элемента памяти, выходной сигнал которого представляет собой требуемый импульс uф.
Аналоговый вариант устройства (фиг.6) может быть реализован на четырех микросхемах, например: пороговые элементы 1-2, 2, 3-2 и 4 - на микросхеме 1401СА1 бКО.348.651-03ТУ; операционные усилители 1-13, 3-13 и 3-14 - на микросхеме 1401УД2А бКО.347.306-01ТУ; ключи 1-10 и 3-10 - на микросхеме 590КН25 бКО.347.000-27ТУ; триггер 5 и одновибратор 6 - на микросхеме 564ТМ2 бКО.347.064ТУ1. Кроме того, в устройство входят несколько резисторов и конденсаторов.
Цифровое устройство (фиг.7) может быть выполнено в двух вариантах. Первый вариант реализуется с использованием блоков-элементов ФНЧ, АЦП, микропроцессора и одновибратора. Второй вариант предусматривает выполнение устройства на одном из современных микроконтроллеров, например на 16-разрядном микроконтроллере 1874 ВЕ36 АЕЯР.431280.169ТУ, в состав которого входят собственно процессор, 10-разрядный АЦП, счетчики-таймеры и др.
Аналоговое устройство (фиг.6) представляется более простым, не требующим программных и аппаратных средств отладки. Однако цифровой формирователь импульсов (фиг.7) может иметь более стабильные параметры в различных температурных условиях, меньшие вес и габариты.
В способах [1] и [2] реализовано адаптивное изменение порога Sпор1 формирования импульсов, что позволяет формировать импульсы из сигналов, площадь которых может варьироваться в довольно широком диапазоне. Такая особенность этих способов исключает влияние на работу устройств погрешности установки зазора между датчиком и возбудителем сигналов, представляет возможность конкретному формирователю работать без перенастройки с несколькими типами датчиков и возбудителей сигналов.
Однако на практике в большинстве случаев применения формирователей импульсов не требуется адаптивное изменение порога Sпор1, так как представляется возможным устанавливать зазор между датчиком и возбудителем с довольно высокой точностью и, кроме того, используемый формирователь импульсов рассчитывается на работу с определенным типом датчика и возбудителя.
Применение в таких случаях устройств, реализованных на основе предлагаемого способа формирования импульсов, позволяет существенно повысить точность повторения периодов следования сигналов ес датчиков формируемыми импульсами uф, а также значительно упростить схему и алгоритм работы формирователей.
Выполненные по предлагаемому способу формирователи импульсов предназначены в основном для работы совместно с устройствами измерения частоты, которые могут быть использованы прежде всего в системах аварийной защиты энергонасыщенных объектов, таких, например, как жидкостные ракетные и газотурбинные авиационные двигатели [4].
Использование в данном случае предлагаемого способа формирования импульсов позволит значительно повысить эффективность аварийной защиты испытываемых объектов и стендов от разрушений.
ЛИТЕРАТУРА
1. Патент RU №2352059 С1, МПК Н03К 5/153, опубл. 10.04.2009 г.
2. Патент RU №2352058 С1, МПК Н03К 5/153, опубл. 10.04.2009 г.
3. Патент RU №2353052 С1, МПК Н03К 5/153, опубл. 20.04.2009 г.
4. Н.Н.Севрюгин, И.А.Потапов, А.Н.Попов, А.М.Цирихов. Опыт автоматизации процесса испытаний авиационных газотурбинных двигателей. Приборы и Системы. Управление, контроль, диагностика. 2001. №5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352057C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399153C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2523166C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2465721C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2400929C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2402025C2 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода. Техническим результатом является повышение точности повторения формируемыми импульсами длительности периодов следования сигналов индукционных датчиков частоты вращения, а также упрощение алгоритма формирования импульсов. Способ содержит этапы: измеряют и сравнивают вольт-секундные площади двух полуволн каждого двухполярного сигнала индукционного датчика частоты вращения, причем предварительно задают пороги формирования импульсов, равные Sпф1=(0,3-0,75)·Sпр.min1 и Sпф2=(0,3-0,75)·Sпр.min2, где Sпр.min1 и Sпр.min2 - предельные минимальные допустимые величины вольт-секундных площадей соответственно первой и второй полуволн сигналов, в процессе измерения площади первой полуволны сигнала сравнивают получаемые величины S1 с пороговым значением Sпф1 и в момент выполнения условия S1≥Sпф1 начинают вырабатывать требуемый импульс, после этого в процессе измерения площади S2 второй полуволны сравнивают получаемые величины S2 с пороговым значением Sпф2 и при выполнении условия S2≥Sпф2 заканчивают формирование требуемого импульса. 2 з.п. ф-лы, 8 ил.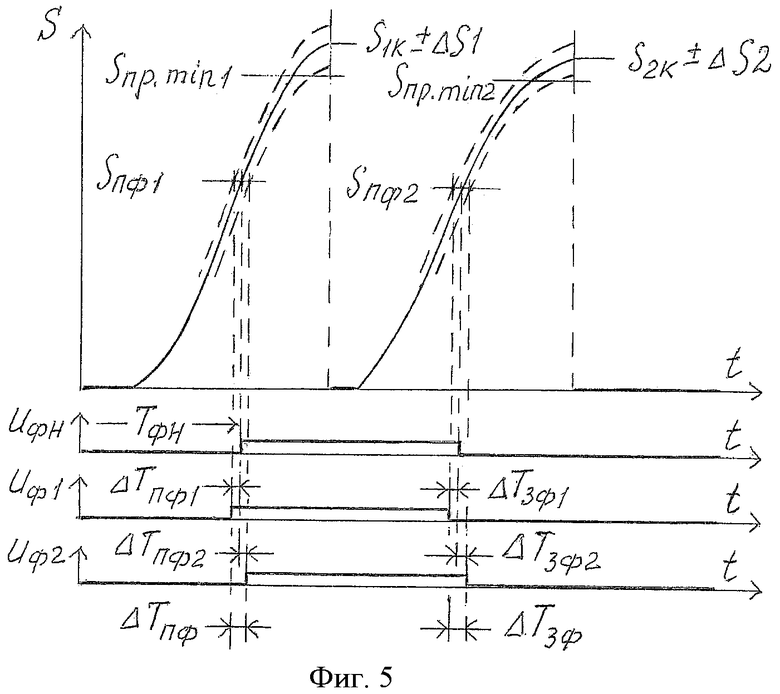
1. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения, в котором измеряют вольт-секундные площади первой и второй (противоположной полярности) полуволн каждого двухполярного сигнала индукционных датчиков частоты вращения, причем сначала измеряют вольт-секундную площадь S1 первой полуволны, отличающийся тем, что предварительно задают пороги формирования импульсов, равные Sпф1=(0,3-0,75)·Sпр.min1 и Sпф2=(0,3-0,75)·Sпр.min2, где Sпр.min1 и Sпр.min2 - предельные минимальные допустимые величины вольт-секундных площадей соответственно первой и второй полуволн сигналов, в процессе измерения сравнивают получаемые величины S1 с пороговым значением Sпф1 и в момент выполнения условия S1≥Sпф1 начинают вырабатывать требуемый импульс, после этого в процессе измерения площади S2 второй (противоположной полярности) полуволны сравнивают получаемые величины S2 с пороговым значением Sпф2 и при выполнении условия S2≥Sпф2 заканчивают формирование требуемого импульса, с поступлением каждого нового двухполярного сигнала индукционного датчика частоты вращения повторяют процесс формирования требуемого импульса.
2. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения по п.1, отличающийся тем, что в момент начала или окончания формирования требуемого импульса вырабатывают второй требуемый импульс, имеющий постоянную длительность.
3. Способ формирования импульсов из сигналов индукционных датчиков частоты вращения по п.1, отличающийся тем, что исследуемые сигналы отфильтровывают от высокочастотных помех и реализуют операции по формированию требуемых импульсов из отфильтрованных сигналов.
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| US 5446322 A, 29.08.1995. | |||

