Область техники, к которой относится изобретение
Изобретение относится к области элктрогидроавтоматики, в частности к автоматическим системам, в которых применяются преобразователи электрического сигнала постоянного или переменного тока в гидравлический.
Уровень техники
Известен ряд преобразователей того же назначения (аналогов), совокупность признаков которых сходна с совокупностью существенных признаков предлагаемого изобретения.
Электрогидравлический преобразователь служит для преобразования электрического сигнала постоянного или переменного тока в сигнал в виде давления жидкости.
Известны электрогидравлические преобразователи [Справочник по средствам автоматики / Б.И.Филиппович, А.П.Шарыгин, В.А.Царьков и др. Под ред. В.Э.Низе и И.В.Антика. - М.: Энергоиздат, 1983, с.409-413], содержащие электромеханический и механогидравлический преобразователи, соединенные последовательно.
Электромеханические преобразователи выполняются с применением различных физических эффектов: магнитоэлектрических, электромагнитных, электромашинных и др.
Известные механогидравлические преобразователи представляют собой дроссель переменного сечения, выполненный в виде золотника, сопла с подвижной заслонкой или струйной трубки. Под воздействием входного сигнала (например, выходного сигнала электромеханического преобразователя) происходит перемещение управляющего элемента (золотника, заслонки или струйной трубки), что приводит к изменению проходного сечения канала, по которому движется рабочая жидкость в напорной магистрали от насоса к исполнительному механизму. Вследствие этого изменяется давление в рабочих полостях исполнительного механизма. Все известные механогидравлические преобразователи являются преобразователями расходного типа и давление на их выходе зависит от перемещения золотника, подвижной заслонки или струйной трубки и от давления питания [Танатар А.И. Элементы промышленной автоматики и их динамические свойства. - Киев.: Техника, 1975. - (с.152-163)].
Для построения аналоговых электрогидравлических преобразователей обычно используются компенсационные схемы, обеспечивающие стабильность преобразования, но из-за конструктивной сложности, присущей таким устройствам, стремятся использовать преобразователи прямого преобразования [Справочник по средствам автоматики / Б.И.Филиппович, А.П.Шарыгин, В.А.Царьков и др. Под ред. В.Э.Низе и И.В.Антика. - М.: Энергоиздат, 1983, с.410]. Для конструкций электрогидравлических преобразователей прямого преобразования характерна зависимость выходного сигнала от колебаний давления питания и окружающих условий, прежде всего от температуры [Справочник по средствам автоматики / Б.И.Филиппович, А.П.Шарыгин, В.А.Царьков и др. Под ред. В.Э.Низе и И.В.Антика. - М.: Энергоиздат, 1983, с.411].
Аналог предлагаемого изобретения, наиболее близкий к нему по совокупности существенных признаков (прототип)
Известен электрогидравлический преобразователь электрического сигнала (тока) в давление жидкости (регулятор давления с пропорциональным управлением) [Гойдо И.Е. Гидроаппаратура с пропорциональным электрическим управлением. - Челябинск, 2000, с.19-22], состоящий из следующих основных частей: двух пропорциональных электромагнитов, корпуса, золотника и двух поршней, выполненных с цилиндрическими головками большего диаметра и установленных в осевых расточках золотника со стороны его торцов. Со стороны каждого из своих концов золотник подпружинен относительно корпусных деталей. Регулятор имеет один напорный, один сливной, а также два рабочих канала, к которым подсоединяется потребитель.
Этот преобразователь имеет существенные недостатки. Золотник имеет перекрытие рабочих окон, что способствует образованию зоны нечувствительности, которая также увеличивается в связи с необходимостью компенсации усилия пружин золотника. При движении жидкости через преобразователь (регулятор) к потребителю и от него перепад давления на выходе регулятора (в его рабочих каналах) помимо величины управляющего сигнала зависит еще от расхода рабочей жидкости. Последнее обстоятельство связано с изменением равновесного положения золотника относительно корпуса (для пропускания рабочей жидкости) и с обусловленным данным обстоятельством изменением усилия деформации пружин золотника, а также появлением осевых гидродинамических сил, действующих на золотник со стороны жидкости, протекающей через открытые им рабочие окна. Поскольку пропускная способность регулятора давления ограничена, то при течении через регулятор жидкости погрешность в его работе (отклонение перепада давления на выходе регулятора от соответствующей величины при нулевом расходе жидкости и прочих равных условиях) может быть значительной. Этот известный электрогидравлический преобразователь (регулятор давления с пропорциональным управлением) имеет слишком сложную конструкцию.
Сущность изобретения
Предлагаемый электрогидравлический преобразователь содержит (Фиг.1. Электрогидравлический преобразователь с прямо пропорциональной зависимостью давления воздуха на выходе от выходного сигнала блока управления: а - принципиальная блок-схема; б - статическая характеристика) блок управления 1, подключенный к микропроцессорному контроллеру 2, подключенному к усилителю 3, питающему обмотку 4 электромагнита, температура которой измеряется датчиком температуры 5, также подключенным к микропроцессорному контроллеру 2; якорь 6 электромагнита опирается на мембранную головку 7, лежащую на мембране 8 и имеющую верхнее седло 9 регулирующего двухседельного клапана 10, поддерживаемого поддерживающей пружиной 12, нижнее впускное седло 10 которого закреплено в перегородке, разделяющей корпус механогидравлического преобразователя на две камеры: камеру А давления питания, закрываемую нижним впускным клапаном, и камеру В выходного давления, мембранная головка 7 имеет канал выхода жидкости в камеру С, соединенную с атмосферой.
С целью регулирования давления на выходе электрогидравлического преобразователя (в рабочем трубопроводе) в обратно пропорциональной зависимости от тока в обмотке 4 катушки электромагнита (Фиг.2. Электрогидравлический преобразователь с обратно пропорциональной зависимостью давления воздуха на выходе от выходного сигнала блока управления: а - принципиальная блок-схема; б - статическая характеристика) на якорь 6 электромагнита опирается измерительная пружина 14, упирающаяся в регулировочный винт 15.
Для уменьшения влияния сил трения и повышения тем самым точности преобразования сигналов в электрогидравлическом преобразователе (Фиг.3. Принципиальная блок-схема электрогидравлического преобразователя с уменьшенным влиянием сил трения на его характеристики) якорь 6 электромагнита подвешен на двух плоских пружинах 16.
Для обеспечения увеличенных расходов жидкости измерительный элемент преобразователя может быть выполнен в виде поршня 17 с уплотнением 18 (Фиг.4. Принципиальная блок-схема электрогидравлического преобразователя с поршневым измерителем выходного давления).
Для обеспечения еще больших расходов жидкости через преобразователь к его выходному трубопроводу подключен гидроусилитель, у которого седло выпускного клапана 9 закреплено на двух поршнях 19 и 20, пространство между которыми соединено с атмосферой (Фиг.5. Принципиальная блок-схема электрогидравлического преобразователя с гидроусилителем).
Таким образом, электрогидравлический преобразователь состоит из электромеханического преобразователя, содержащего элементы 1-6, и механогидравлического преобразователя, содержащего элементы 7-16. Механогидравлический преобразователь является преобразователем безрасходного типа, так как принцип его действия основан не на зависимости выходного давления от соотношения расходов жидкости через дроссели, а на принципе уравновешивания (компенсации) сил, действующих в нем. В предлагаемом электрогидравлическом преобразователе отсутствуют перемещения, определяющие характеристику преобразователя. В нем также уменьшено влияние сил трения на характеристики. Он обладает большей простотой конструкции, более высокой точностью преобразования сигналов и большей надежностью, чем известные электрогидравлические преобразователи.
Предлагаемый электрогидравлический преобразователь работает следующим образом. При установившемся режиме, то есть при постоянном значении входных сигналов блока управления 1 ХВХ, датчика 5 температуры обмотки 4 катушки электромагнита и тока IK в обмотке катушки 4, сила FЭ электромагнита на якоре 6 постоянна, воздействует на мембранную головку 7 и уравновешивается силой FM давления жидкости Р2 на выходе электрогидравлического преобразователя на мембрану 8. При этом FM=FЭ, а давление Р2=FЭ/SM, где SM - эффективная площадь мембраны 8. Ток IK в обмотке катушки 4 определяется входными сигналами блока управления 1 Хвх и датчика 5 температуры обмотки 4.
При увеличении выходного сигнала блока управления 1 увеличиваются ток IK в обмотке 4 и сила электромагнита FЭ, которая становится больше силы FM. Под действием усилия, равного разности сил F2 и FM, мембрана 8 прогибается вниз, регулирующий двухседельный клапан 10 открывает нижнее впускное седло 11. Жидкость из камеры А поступает через нижнее впускное седло 11 в камеру В, и давление Р2 на выходе электрогидравлического преобразователя увеличивается. При этом увеличивается сила FM, и при достижении этой силой значения, равного FЭ, мембранная головка 7 поднимается и регулирующий двухседельный клапан 10 закрывает нижнее впускное седло 11. Давление P2 становится постоянным и равным FЭ/SM.
При уменьшении выходного сигнала блока управления 1 уменьшаются ток IK в обмотке катушки 4 и сила электромагнита FЭ, которая становится меньше силы FM2. Под действием усилия, равного разности сил FM и FЭ, мембрана 8 прогибается вверх, регулирующий двухседельный клапан 10 открывает верхнее выпускное седло 9. Жидкость из камеры В поступает через верхнее выпускное седло 9 в камеру С, то есть в атмосферу, и давление P2 на выходе электрогидравлического преобразователя уменьшается. При этом уменьшается сила FM и при достижении ею значения, равного
FЭ, мембранная головка 7 опускается и регулирующий двухседельный клапан 10 закрывает верхнее выпускное седло 9. Давление Р2 становится постоянным и равным FЭ/SM.
Таким образом, электрогидравлический преобразователь работает на принципе уравновешивания (компенсации) сил, действующих в нем: силы якоря 6 электромагнита FЭ, силы давления жидкости Р2 на мембрану 8 и мембранную головку 7 FM и силы измерительной пружины FП. Кроме этих основных сил, есть еще сила действия на регулирующий двухседельный клапан 10 поддерживающей пружины 12 и силы веса якоря 6 электромагнита и измерительной пружины 14. Однако эти последние три силы малы, постоянны и не оказывают влияния на характеристики электрогидравлического преобразователя.
При постоянном значении тока IK в обмотке 4 давление Р2, поддерживается постоянным. Утечки воздуха в рабочем воздухопроводе уменьшают силу FM, и равенство FM=FЭ нарушается. Восстановление равновесия сил происходит так же, как и при увеличении тока IK в обмотке 4.
Таким образом, при увеличении тока Iк в обмотке 4 давление Р2 на выходе электрогидравлического преобразователя увеличивается (см. фиг.1, а).
В случае применения в электрогидравлическом преобразователе измерительной пружины 14 и регулировочного винта 15 (см. фиг.2) при токе IK в обмотке 4, равном нулю, сила FЭ=0 и давление на выходе электрогидравлического преобразователя P2=FП/SМ, где FП - сила затяжки измерительной пружины 14, которая посредством якоря 6 воздействует на мембранную головку 7. При увеличении тока IK в обмотке 4 (но уже обратного направления, чем в первом случае) сила - FЭ увеличивается, сила давления якоря 6 на мембранную головку 7 FM уменьшается, так как FN=FП-FЭ, и давление Р2 на выходе электрогидравлического преобразователя уменьшается. Таким образом, при увеличении тока IK в обмотке 4 (но уже обратного направления, чем в первом случае) давление Р2 на выходе электрогидравлического преобразователя не увеличивается, а уменьшается (см. фиг.2).
При изменении (например, повышении) температуры обмотки 4 электромагнита, то есть при отклонении от некоторого заданного значения, выходной сигнал датчика температуры 5 отклоняется от заданного значения, что приводит к изменению тока IK в обмотке 4 и к уменьшению давления Р2 на выходе электрогидравлического преобразователя при постоянном значении выходного сигнала блока управления 1. Такое отклонение выходного сигнала датчика температуры 5 от заданного значения приводит к тому, что микропроцессорный контроллер 2 изменяет входной сигнал усилителя 3 таким образом, чтобы значение тока IK в обмотке 4 всегда соответствовало значению выходного сигнала блока управления 1. Таким образом компенсируется влияние температуры обмотки 4 на статическую характеристику электрогидравлического преобразователя р2=f(Ххв).
Технический результат, который может быть получен при осуществлении предлагаемого изобретения
Технический результат заключается в обеспечении пропорциональной зависимости давления воздуха на выходе преобразователя от выходного сигнала блока управления независимо от колебания давления перед ним, утечек в рабочем воздухопроводе, температуры и других факторов.
Технический результат достигается за счет того, что электрогидравлический преобразователь, содержащий обмотку электромагнита, подключенную к электрическому усилителю, якорь электромагнита, механогидравлический преобразователь и датчик температуры обмотки, отличается тем, что электрический усилитель подключен к выходу микропроцессорного контроллера, к двум входам которого подключены блок управления преобразователем и датчик температуры обмотки, якорь электромагнита опирается на измеритель выходного давления - мембранную головку, лежащую на мембране и имеющую соединенное с атмосферой верхнее выпускное седло регулирующего двухседельного клапана, поддерживаемого поддерживающей пружиной, нижнее впускное седло которого закреплено в перегородке, разделяющей корпус механогидравлического преобразователя на две камеры: камеру давления питания, закрываемую нижним впускным клапаном, и камеру выходного давления, закрываемую верхним выпускным клапаном и мембраной.
На якорь электромагнита опирается измерительная пружина, упирающаяся в регулировочный винт.
Якорь электромагнита подвешен на двух плоских пружинах.
Измеритель выходного давления выполнен в виде поршня с закрепленным на нем седлом выпускного клапана.
К выходному трубопроводу преобразователя подключен гидроусилитель, у которого седло выпускного клапана закреплено на двух поршнях, пространство между которыми соединено с атмосферой.
Перечень фигур
Фиг.1. Электрогидравлический преобразователь с прямо пропорциональной зависимостью давления воздуха на выходе от тока в обмотке электромагнита: а - принципиальная блок-схема; б - статическая характеристика.
Фиг 2. Электрогидравлический преобразователь с обратно пропорциональной зависимостью давления воздуха на выходе от тока в обмотке электромагнита: а - принципиальная блок-схема; б - статическая характеристика.
Фиг 3. Принципиальная блок-схема электрогидравлического преобразователя с уменьшенным влиянием сил трения на его характеристики.
Фиг.4. Принципиальная блок-схема электрогидравлического преобразователя с поршневым измерителем выходного давления.
Фиг.5. Принципиальная блок-схема электрогидравлического преобразователя с гидроусилителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| Пропорциональный электрогидравлический механизм управления фрикционами гидромеханической передачи мобильной машины | 2018 |
|
RU2690542C1 |
| ПРОПОРЦИОНАЛЬНЫЙ КЛАПАН УПРАВЛЕНИЯ ФРИКЦИОНАМИ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ | 2016 |
|
RU2624926C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ТОРМОЗА НАКАТА | 1991 |
|
RU2013252C1 |
| Способ обработки контактной поверхности седла шарикового клапана электрогидравлической форсунки пристукиванием и система для его реализации | 2024 |
|
RU2841414C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ | 1991 |
|
RU2021653C1 |
| Регулятор давления | 1986 |
|
SU1359182A1 |
| ЧЕТЫРЕХСЕКЦИОННЫЙ ПОГРУЖНОЙ БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2022 |
|
RU2812560C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2174185C2 |
| Антиблокировочное устройство | 1989 |
|
SU1655298A3 |
Изобретение относится к области электрогидроавтоматики, в частности к автоматическим системам, в которых применяются преобразователи электрического сигнала постоянного или переменного тока в гидравлический. Электрогидравлический преобразователь содержит обмотку электромагнита, подключенную к электрическому усилителю, якорь электромагнита, механогидравлический преобразователь и датчик температуры обмотки. Электрический усилитель подключен к выходу микропроцессорного контроллера, к двум входам которого подключены блок управления преобразователем и датчик температуры обмотки. Якорь электромагнита опирается на измеритель выходного давления - мембранную головку, лежащую на мембране и имеющую соединенное с атмосферой верхнее выпускное седло регулирующего двухседельного клапана, поддерживаемого поддерживающей пружиной, нижнее впускное седло которого закреплено в перегородке, разделяющей корпус механогидравлического преобразователя на камеру давления питания, закрываемую нижним впускным клапаном, и камеру выходного давления, закрываемую верхним выпускным клапаном и мембраной. Техническим результатом изобретения является упрощение конструкции, повышение точности и надежности. 4 з.п. ф-лы, 5 ил.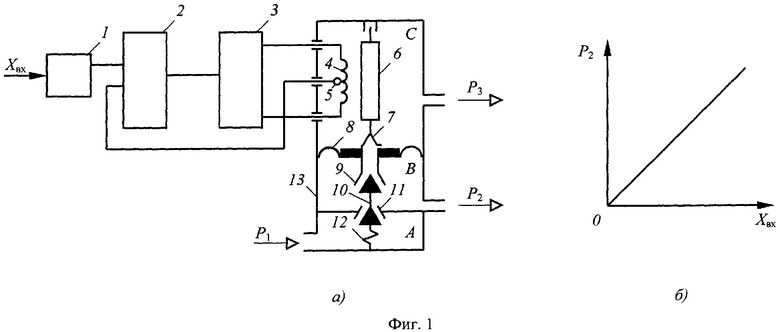
1. Электрогидравлический преобразователь, содержащий обмотку электромагнита, подключенную к электрическому усилителю, якорь электромагнита, механогидравлический преобразователь и датчик температуры обмотки, отличающийся тем, что электрический усилитель подключен к выходу микропроцессорного контроллера, к двум входам которого подключены блок управления преобразователем и датчик температуры обмотки, якорь электромагнита опирается на измеритель выходного давления - мембранную головку, лежащую на мембране и имеющую соединенное с атмосферой верхнее выпускное седло регулирующего двухседельного клапана, поддерживаемого поддерживающей пружиной, нижнее впускное седло которого закреплено в перегородке, разделяющей корпус механогидравлического преобразователя на две камеры: камеру давления питания, закрываемую нижним впускным клапаном, и камеру выходного давления, закрываемую верхним выпускным клапаном и мембраной.
2. Электрогидравлический преобразователь по п.1, отличающийся тем, что на якорь электромагнита опирается измерительная пружина, упирающаяся в регулировочный винт.
3. Электрогидравлический преобразователь по п.1, отличающийся тем, что якорь электромагнита подвешен на двух плоских пружинах.
4. Электрогидравлический преобразователь по п.1, отличающийся тем, что измеритель выходного давления выполнен в виде поршня с закрепленным на нем седлом выпускного клапана.
5. Электрогидравлический преобразователь по п.1, отличающийся тем, что к его выходному трубопроводу подключен гидроусилитель, у которого седло выпускного клапана закреплено на двух поршнях, пространство между которыми соединено с атмосферой.
| Электрогидравлический аналоговый преобразователь | 1982 |
|
SU1170441A1 |
| Электромеханический преобразователь | 1975 |
|
SU547045A1 |
| US 4369804, 25.01.1983 | |||
| Филиппович Б.И., Шарыгин А.П., Царьков В.А | |||
| и др | |||
| Справочник по средствам автоматики | |||
| / Под ред | |||
| В.Э.Низе и И.В.Антика | |||
| - М.: Энергоиздат, 1983, с.409-413. | |||

