HsoepeteHHe относится к исполнительйым Электромеханическимпреобразователям
(ЭМП) и предназначено для использования в электрогидравлических н электропневматических системах управления.
Известен ЭМП постоянного тока в линейное перемещение, построенный на базе прямоходоЁых электромагнптов с подпружиненным якорем. В этом устройстве рабочий диапазон перемещений выходного штока значительно меньше возможного хода якоря электромагнита. Наиболее близким техническим решением к изобретению является электромеханический преобразователь, содержащий корпус, электромагнит с подпружиненным якорем и операционный усилитель, выход которого соединен с обмоткой электромагнита. Этот известный преобразователь характеризуется невысокой точностью преобразования.
Целью изобретения является повышение точности. В описываемом преобразователе это достигается тем, что в нем на якоре электромагнита установлен датчик положения, выполненный в виде упругого кольца с закрепленными на его внутренней и наружной поверхностях тензодатчиками, соединенными с соответствующими входами усилителя, причем в кольце выполнены два соосных радиальных отверстия, через которые пропущен шток якоря, размещенный внутри пружины, один конец которой
Закреплен на штоке, а другой - связан с кольцом.
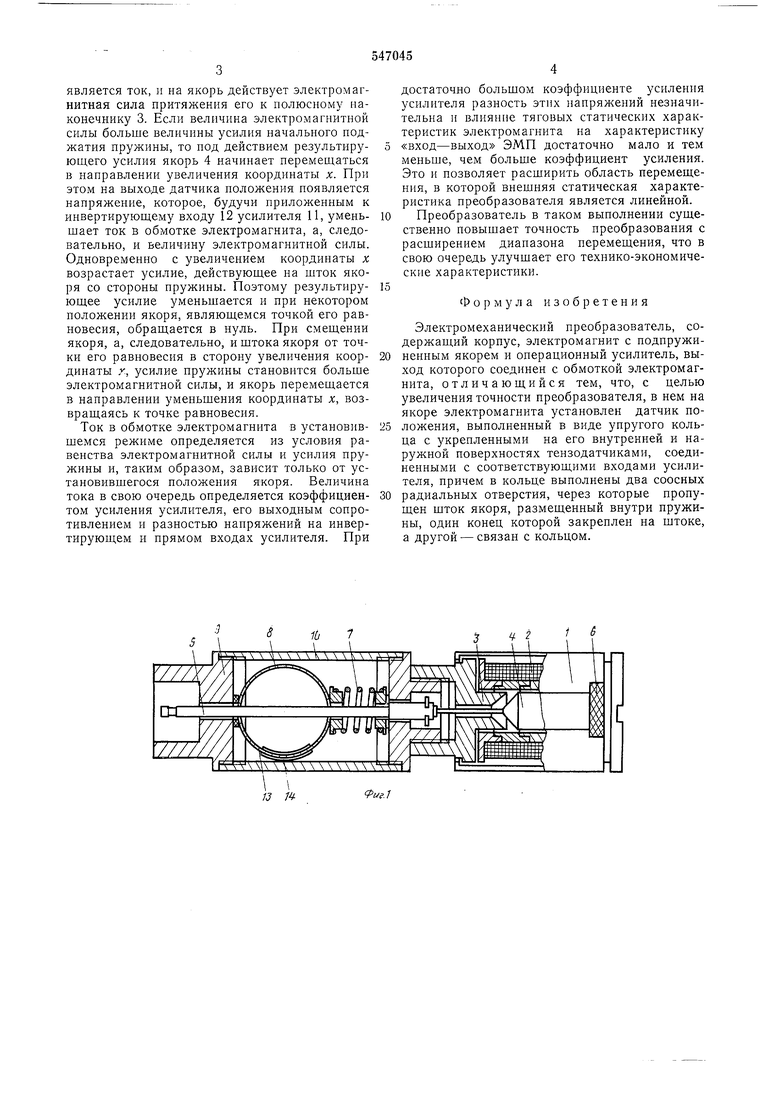
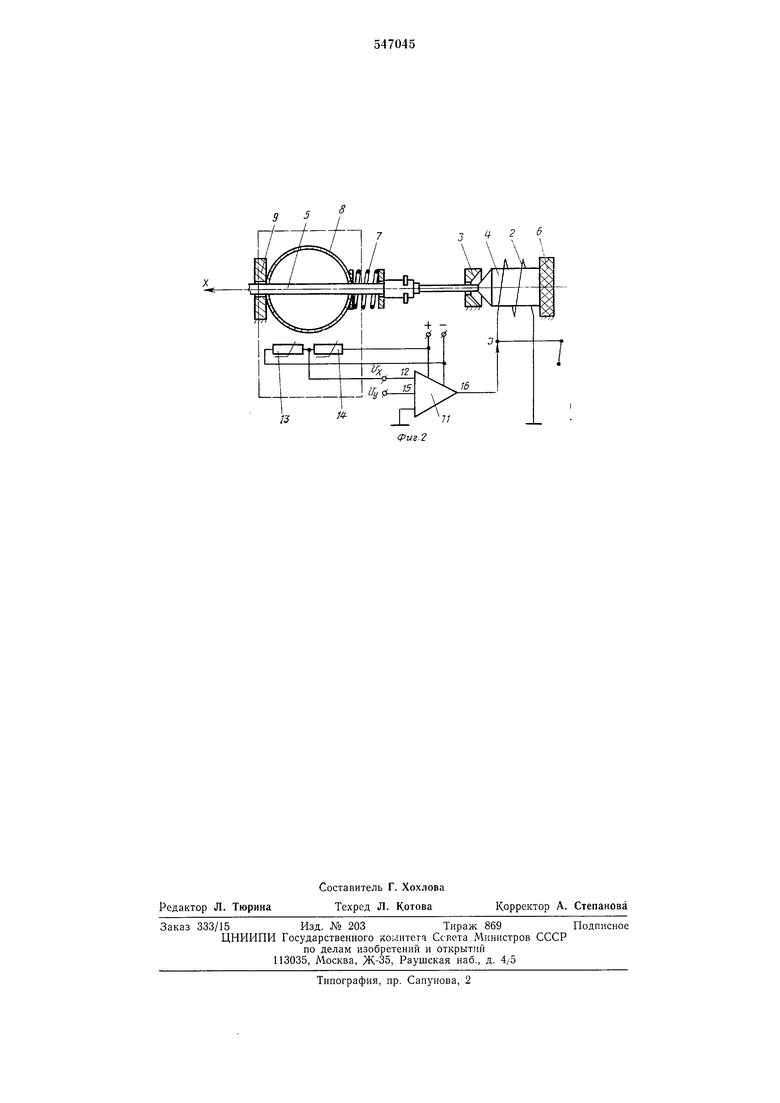
На фиг. 1 изображена функциональная схема ЭМП; на фиг. 2 - соединение электромагнита с датчиком положения, продольный разрез.
ЭМП состоит из электромагнита 1 с обмоткой 2, полюсным наконечником 3, якорем 4 и штоком 5 якоря, посредством которого якорь
поджимается в крайнее (начальное) положение до упора 6 пружиной 7, уппрающейся с одной стороны в выступ штока через упругое кольцо 8, а с другой стороны -в крышку 9 корпуса 10, а также из усилителя 11, инвертирующий вход 12 которого имеет соединение со средней точкой полумоста тензодатчиков 13 и 14, укрепленных на внутренней и наружной поверхностях упругого кольца 8 и подключенных к источнику напряженпя; на прямой вход 15
усилителя подается сигнал управления перемешением штока преобразователя, а вход 16 усилителя подключается к обмотке электромагнита.
В исходном состоянии величина сигнала управлепия f/y, ток в обмотке электромагнита и напряжение U с датчика положения равны нулю; шток якоря поджат пружиной в крайнее положение до упора. При подаче на прямой вход 15 усилителя И иостоянного сигнала
;Уу const., в обмотке 2 электромагнита 1 появляется ток, i на якорь действует электромагнитная сила притяжения его к полюсному наконечнику 3. Если величина электромагнитной силы больше величины усилия начального ноджатия пружины, то под действием результирующего усилия якорь 4 начинает перемещаться в направлении увеличения координаты х. При этом на выходе датчика положения появляется напряжение, которое, будучи приложенным к инвертирующему входу 12 усилителя И, уменьщает ток в обмотке электромагнита, а, следовательно, и величину электромагнитной силы. Одновременно с увеличением координаты х возрастает усилие, действующее на шток якоря со стороны пружины. Поэтому результирующее усилие уменьшается и при некотором положении якоря, являющемся точкой его равновесия, обращается в нуль. При смещении якоря, а, следовательно, и штока якоря от точки его равновесия в сторону увеличения координаты ,г, усилие пружины становится больше электромагнитной силы, и якорь перемещается в направлении уменьшения координаты х, возвращаясь к точке равновесия.
Ток в обмотке электромагнита в установившемся режиме определяется из условия равенства электромагнитной силы и усилия пружины и, таким образом, зависит только от установившегося положения якоря. Величина тока в свою очередь определяется коэффициентом усиления усилителя, его выходным сопротивлением и разностью напряжений на инвертирующем и прямом входах усилителя. При
достаточно больщом коэффициенте усиления усилителя разность этих напряжений незначительна и влияние тяговых статических характеристик электромагнита на характеристику «вход-выход ЭМП достаточно мало и тем меньше, чем больше коэффициент усиления. Это и позволяет расширить область перемещения, в которой внешняя статическая характеристика преобразователя является линейной.
Преобразователь в таком выполнении существенно повыщает точность преобразования с расширением диапазона перемещения, что в свою очередь улучщает его технико-экономические характеристики.
Формула изобретения
Электромеханический преобразователь, содержащий корпус, электромагнит с подпружиненным якорем и операционный усилитель, выход которого соединен с обмоткой электромагнита, отличающийся тем, что, с целью увеличения точности преобразователя, в нем на якоре электромагнита установлен датчик положения, выполненный в виде упругого кольца с укрепленными на его внутренней и наружной поверхностях тензодатчиками, соединенными с соответствующими входами усилителя, причем в кольце выполнены два соосных радиальных отверстия, через которые пропущен щток якоря, размещенный внутри пружины, один конец которой закреплен на щтоке, а другой - связан с кольцом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний электромагнита | 1989 |
|
SU1644248A1 |
| Стенд для испытаний электромагнита | 1989 |
|
SU1644249A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Устройство для испытаний электромагнитов | 1989 |
|
SU1667010A1 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Стенд для испытаний электромагнитов | 1989 |
|
SU1667012A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1984 |
|
SU1232019A1 |
/J
0W./
9 5
К
