Изобретение относится к радиоизмерительной технике и радиосвязи и может быть использовано для определения параметров радиосигналов.
Одним из актуальных направлений в радиосвязи является повышение энергетической скрытности создаваемых средств связи. Для обеспечения скрытности создаваемых средств связи используется широкополосные сигналы с низким энергетическим потенциалом, в том числе фазоманипулированные сигналы (ФМС).
При проведении радиомониторинга слабых ФМС возникает необходимость в их обнаружении, классификации и оценивании таких параметров, как амплитуда Ums, тактовая частота F и средняя частота fs. Кроме того, при построении средств радиомониторинга необходимо обеспечивать оперативность обработки ФМС.
С учетом вышеперечисленного для проведения эффективного радиомониторинга слабых широкополосных ФМС необходимо разработать принципы построения многофункционального автокорреляционного устройства (МАУ), функционирующего при отсутствии априорной информации о классе и параметрах принимаемых сигналов (Ums, F, fs) при отношении сигнал/помеха, меньшем единицы.
В теории потенциальной помехоустойчивости показано, что для решения подобных задач наиболее эффективными являются алгоритмы автокорреляционной обработки [1].
Известно устройство для измерения средней частоты сигналов (А.С. СССР №1237985, опубликовано в ОБИ №22, 1986), содержащее квадратурный фазовый коррелятор, на один из входов которого сигнал подается непосредственно, а на другой - через линию задержки, на выходах перемножителей фазового коррелятора включены интеграторы, квадраторы, блоки вычитания, суммирования, деления, функциональный преобразователь и индикатор.
Признаками данного аналога, совпадающими с существенными признаками заявляемого устройства, являются квадратурный фазовый коррелятор, на выходах которого включены интеграторы и квадраторы, функциональный преобразователь и индикатор. К недостаткам аналога следует отнести: 1) малую допустимую крутизну дискриминационной характеристики, 2) возможность обработки при уровне принимаемых сигналов, большем уровня помехи, 3) ограниченные функциональные возможности, поскольку измеряется только один параметр сигналов (средняя частота).
Известно также устройство для определения классов радиосигналов (А.С. СССР №1503024, опубликовано в ОБИ №31, 1989), содержащее корреляционно-фильтровое устройство, линии задержки, интеграторы, фазовые детекторы, перемножители, генератор, фазовращатель, блоки вычитания и суммирования, индикатор в виде электронно-лучевой трубки.
Признаками данного аналога, совпадающего с существенными признаками заявляемого устройства, являются корреляционно-фильтровое устройство, на выходах которого включены интеграторы, фазовые детекторы, линия задержки, фазовращатель, перемножители, блоки вычитания и суммирования, индикатор. К недостаткам аналога следует отнести: 1) низкое быстродействие, 2) возможность обработки при уровне принимаемых сигналов, большем уровня помехи, 3) ограниченные функциональные возможности, поскольку осуществляется только классификация сигналов.
Из известных устройств, пригодных для обработки слабых широкополосных сигналов, наиболее близким по технической сущности является частотный дискриминатор (А.С. СССР №936374, опубликовано в ОБИ №22, 1982), реализованный на основе корреляционно-фильтрового преобразования, содержащий два смесителя, два полосовых фильтра, линию задержки, фазовращатель, два фазовых детектора, фильтр нижних частот, блок выделения сигнала ошибок, генератор гармонических колебаний, управляющий элемент, генератор стимулирующих сигналов, первый выход которого соединен со входом частотного дискриминатора, а второй выход соединен со входом второго фазового детектора; вход частотного детектора соединен с первым входом первого смесителя и с первым входом второго смесителя, второй вход первого смесителя соединен с выходом линии задержки, выход первого смесителя соединен со входом первого полосового фильтра, а выход первого полосового фильтра соединен с первым входом первого фазового детектора, выход второго смесителя соединен со входом линии задержки, второй выход генератора гармонических колебаний соединен со входом фазовращателя, выход которого соединен со вторым входом первого фазового детектора, выход которого соединен со входами фильтра нижних частот и второго полосового фильтра; выход фильтра нижних частот является выходом частотного дискриминатора, выход второго полосового фильтра соединен со вторым входом второго фазового детектора, выход которого соединен со входом блока выделения сигнала ошибок, выход которого соединен со входом управляющего элемента, выход которого соединен с управляющим входом генератора гармонических колебаний.
Все вышеперечисленные существенные признаки прототипа совпадают с существенными признаками заявляемого устройства.
В данном устройстве (прототипе) [2] осуществляется оценка только средней частоты широкополосных сигналов. В соответствии с терминологией, принятой в работе [3], частотный дискриминатор относится к классу специализированных корреляционно-фильтровых устройств.
К недостаткам прототипа следует отнести ограниченные функциональные возможности, а также большие погрешности при измерении средней частоты в условиях малого входного отношения сигнал/помеха и при наличии априорной неопределенности о параметрах широкополосных сигналов.
Задача, на решение которой направлено заявляемое изобретение, - расширение функциональных возможностей устройства за счет возможности одновременного обнаружения, классификации, измерения амплитуды, средней и тактовой частот фазоманипулированных сигналов при повышении помехоустойчивости и снижении погрешностей измерения параметров сигналов при их уровне, меньшем, чем уровень помехи.
Технический результат достигается тем, что в известное адаптивное многофункциональное корреляционно-фильтровое устройство введены:
а) канал поиска по частоте и обнаружения сигналов, включающий в себя входной тракт (1), смеситель (2), перестраиваемый по частоте генератор (32), полосовой фильтр с регулировкой полосы пропускания (3), детектор огибающей (6), фильтр нижних частот (7), решающее устройство (8), управитель (36);
б) канал адаптации по средней и тактовой частотам сигнала, включающий в себя делитель напряжений (16), фазовращатель (21), смеситель (22), полосовой фильтр с регулировкой средней частоты (23), детектор огибающей (28), фильтр нижних частот (29), пороговое устройство (30), частотомер (24), решающее устройство (8), управители (26, 27);
в) канал классификации и точного измерения параметров сигналов, включающий в себя решающее устройство (8), частотомер (24), пороговое устройство (30), управители (25, 31, 34), сумматор (33), частотомер (35).
Для достижения технического результата в адаптивное многофункциональное корреляционно-фильтровое устройство, содержащее два смесителя (4, 9), два полосовых фильтра (5, 18), линию задержки (10), фазовращатель (13), два фазовых детектора (14, 17), фильтр нижних частот (15), блок выделения сигнала ошибок (19), генератор гармонических колебаний (12), управляющий элемент (20), генератор стимулирующих сигналов (11), первый выход которого соединен со входом частотного дискриминатора (37), а второй выход соединен со входом второго фазового детектора (17); вход частотного детектора (37) соединен с первым входом смесителя (4) и с первым входом смесителя (9), второй вход смесителя (4) соединен с выходом линии задержки (10), выход смесителя (4) соединен со входом полосового фильтра (5), а выход полосового фильтра (5) соединен с первым входом фазового детектора (14), выход смесителя (9) соединен со входом линии задержки (10), второй выход генератора гармонических колебаний (12) соединен со входом фазовращателя (13), выход которого соединен со вторым входом фазового детектора (14), выход которого соединен со входами фильтра нижних частот (15) и полосового фильтра (18); выход фильтра нижних частот (15) является выходом частотного дискриминатора (37), выход полосового фильтра (18) соединен со вторым входом фазового детектора (17), выход которого соединен со входом блока выделения сигнала ошибок (19), выход которого соединен со входом управляющего элемента (20), выход которого соединен с управляющим входом генератора гармонических колебаний (12) дополнительно введены: входной тракт (1), смеситель (2), перестраиваемый по частоте генератор (32), полосовой фильтр с регулировкой полосы пропускания (3), детектор огибающей (6), фильтр нижних частот (7), решающее устройство (8), управитель (36); делитель напряжений (16), фазовращатель (21), смеситель (22), полосовой фильтр с регулировкой средней частоты (23), детектор огибающей (28), фильтр нижних частот (29), пороговое устройство (30), частотомер (24), решающее устройство (8), управители (26, 27), решающее устройство (8), частотомер (24), пороговое устройство (30), управители (25, 31, 34), сумматор (33), частотомер (35), причем вход входного тракта (1) является входом заявляемого устройства, а выход входного тракта (1) соединен с первым входом смесителя (2), второй вход которого соединен с первым выходом управляемого по частоте генератора (32), выход смесителя (2) соединен со входом полосового фильтра с регулируемой полосой пропускания (3), управляющий вход которого соединен с выходом управителя (25), выход детектора огибающей (6) соединен со входом фильтра нижних частот (7), выход которого соединен с первым входом решающего устройства (8) и вторым входом делителя напряжений (16), второй вход решающего устройства (8) соединен с выходом первого частотомера (24), третий вход решающего устройства (8) соединен с выходом порогового устройства (30), четвертый вход решающего устройства (8) соединен с выходом частотомера (35), управляющий выход решающего устройства (8) соединен со входами управителей (25, 26, 27, 31, 34, 36), выход фильтра нижних частот (15) соединен с первым входом делителя напряжений (16), выход которого соединен со входом управителя (34), вход фазовращателя (21) соединен со вторым выходом генератора гармонических колебаний (12), а выход фазовращателя (21) соединен со вторым входом смесителя (22), выход которого соединен со входом полосового фильтра с регулируемой средней частотой (23), выход которого соединен со входами частотомера (24) и входом детектора огибающей (28), выход которого соединен со входом фильтра нижних частот (29), выход которого соединен со входом порогового устройства (30); выход управителя (25) соединен с управляющим входом фильтра (3), выход управителя (26) соединен с управляющим входом линии задержки (10), выход управителя (31) соединен с управляющими входами входного тракта (1) и генератора стимулирующих сигналов (11), второй выход управляемого по частоте генератора (32) соединен со входом частотомера (35), выход делителя напряжений (16) соединен со входом управителя (34), выход управителя (34) соединен с первым входом сумматора (33), выход управителя (36) соединен со вторым входом сумматора (33), выход сумматора (33) соединен с управляющим входом генератора (32).
На чертеже приведена структурная схема адаптивного многофункционального корреляционно-фильтрового устройства (АМКФУ), где 1 - входной тракт; 3, 5, 18, 23 - полосовые фильтры (ПФ1, ПФ2, ПФ3, ПФ4); 13, 21 - фазовращатели (Фвр1, Фвр2); 2, 4, 9, 22 - смесители (См1, См2, См3, См4); 7, 15, 29 - фильтры нижних частот (ФНЧ1, ФНЧ2, ФНЧ3); 6, 28 - детекторы огибающей (ДО1, ДО2); 10 - линия задержки (ЛЗ); 11 - генератор стимулирующего сигнала (Гстс); 12, 32 - генераторы (Г1, Г2); 14, 17 - фазовые детекторы (ФД1, ФД2); 19 - блок выделения сигнала ошибки (БВСО); 20 - управляющий элемент (УЭ); 16 - делитель напряжений (Дел); 30 - пороговое устройство (ПУ); 24, 35 - счетчиковые частотомеры (Чр1, Чр2); 25, 26, 27, 31, 34, 36 - управители (Упр1, Упр2, Упр3, Упр4, Упр5, Упр6); 33 - сумматор (Сум); 8 - решающее устройство (РУ); 37 - частотный дискриминатор (ЧД).
Возможность достижения поставленной задачи изобретения подтверждается приведенным ниже анализом работы устройства. Входной тракт (ВТ) обеспечивает на основе использования пространственной и частотной селекции разряжение потока сигналов и помех до двухкомпонентной смеси у2(t)=S(t)+n(t), где S(t) - сигнал на выходе ВТ; n(f) - гауссовая стационарная помеха на выходе ВТ.
При приеме слабых широкополосных фазоманипулированных сигналов (ФМС) с неизвестной формой после их преобразования по частоте в смесителе (CM1) на выходе полосового фильтра с регулируемой полосой пропускания (ПФ1) имеем:

hф1(t)=2Δfnsinc(πΔfnt)cos(2πfф1t);
Uг2(t)=Umг2cos(2πfг2t),
где hф1(f) - импульсная реакция ПФ1; Uг2(f) - напряжение генератора с управляемой частотой (Г2) с амплитудой Umг2 и частотой fг2; fф1, Δfn - средняя частота и максимально возможная полоса пропускания ПФ1.
Напряжение у20(f) представляет аддитивную смесь:
у20(t)=S0(t)+n0(t) при t0≤t≤t0+Тс;
S0(t)=Ums0П(t)cos[ωs0t+φs0]; ωs0=2πfs0; ωs0=ωs-ωг2; 

ωг2=2πfг2; fs∈[fsн, fsв]; Δfs∈[Δfsн, Δfsв]; φs0∈[0,2π]; ΔF=fsв-fsн;
при τ≤Tэ;

rn(τ)=sinc(πΔfnτ); 
где S0(t), n0(t) - ФМС и помеха n0(t) на выходе ПФ1; Ums0, ωs0, φs0 - амплитуда, средняя частота и начальная фаза ФМС на выходе ПФ1; П(t) - псевдослучайная манипулирующая последовательность; ωs - средняя частота ФМС на выходе ВТ; fsн, fsв - нижняя и верхняя границы частоты fs; Δfsн, Δfsв - нижняя и верхняя границы ширины спектра Δfs принимаемых ФМС; Тэ - длительность элемента (посылки) ФМС; F - тактовая частота ФМС; Rs0(τ), Rn0(τ) - автокорреляционная функция ФМС S0(t) и помехи n0(t); rs(τ), rn(τ) - огибающая коэффициента автокорреляции ФМС S0(t) и помехи n0(t);  , Nn0 - дисперсия и спектральная плотность помехи n0(t), t0, Тc - момент начала и длительность сеанса функционирования АМКФУ.
, Nn0 - дисперсия и спектральная плотность помехи n0(t), t0, Тc - момент начала и длительность сеанса функционирования АМКФУ.
Процесс обработки ФМС в АМКФУ состоит из пяти этапов адаптации. На первом этапе осуществляется поиск по частоте и обнаружение ФМС.
Процесс перестройки частоты Г2 продолжается до тех пор, пока не выполнится условие fs0=fs-fг2(t)∈[(fф1-Δfn/2); (fф1+Δfn/2)]. После чего поиск по частоте прекращается и осуществляется обнаружение ФМС.
Для осуществления корреляционно-фильтровой обработки необходимо формировать опорное напряжение у22(t-τлз), которое получается в результате смещения процесса у20(t) на фиксированную частоту fг1 и временного сдвига на величину τлз:

hф(t)=2Δfnsinc(πΔfnt)cos[2π(fs0+fг1)t]; Uг1(t)=Umг1cos(2πfг1t),
где hф(f) - импульсная реакция полосового фильтра, входящего в нагрузку смесителя (См3) и имеющего среднюю частоту fs0+fг1 и полосу пропускания Δfn; Uг1(t) - напряжение гетеродина гармонического колебания (Г1), имеющего амплитуду Umг1 и частоту fг1.
В результате корреляционно-фильтровой обработки на выходе полосового фильтра (ПФ2) имеем напряжение:

hф2(t)=2Δfф2sinc(πΔfф2t)cos(2πfг1t),
где hф2(t) - импульсная реакция полосового фильтра (ПФ2), имеющего полосу пропускания Δfф2 и среднюю частоту fг1, U51(t) - компонент, обусловленный взаимодействием типа «сигнал-сигнал»; U52(t) - компонент, обусловленный взаимодействием типа «сигнал-помеха»; U53(t) - компонент, обусловленный взаимодействием типа «помеха-помеха»;.
При приеме ФМС с неизвестной формой имеем
U51(t)=Um51П(t)П(t-τлз)cos{2π[fг1t+(fs0+fr1)τлз]} при Δfф2-Δfsв.
Алгоритм обнаружения ФМС имеет следующий вид:
при t0≤t≤t0+Δt1;
Δt1=ΔFT1/2Δfn; 
где Н0 - гипотеза об обнаружении ФМС; U7(T1) - напряжения на выходе фильтра нижних частот (ФНЧ1), имеющего постоянную времени накопления Т1; Uпор1 - нормированный порог при обнаружении; Кп - коэффициент пропорциональности размерностью 1/В; Δt1 - длительность первого этапа обработки ФМС.
Анализ характеристик обнаружения ФМС с учетом методики, изложенной в [1], показывает, что при  Δfn≥fsв; Δfф2≈Δfsв и Δfф2T1>>1 за счет нормализации напряжения U7(T1) можно использовать следующие соотношения:
Δfn≥fsв; Δfф2≈Δfsв и Δfф2T1>>1 за счет нормализации напряжения U7(T1) можно использовать следующие соотношения:
α1=1-Ф(gп),
где D1, α1 - вероятности правильного обнаружения и ложных тревог; Ф(x), arc Ф(х) - функция Лапласа и обратная функция Лапласа;  - отношение сигнал/помеха по мощности на выходе ПФ1; g0 - отношение сигнал/помеха по напряжению на выходе ФНЧ1; gп - нормированный порог в РУ; gф - отношение сигнал/помеха по напряжению на выходе ПФ2.
- отношение сигнал/помеха по мощности на выходе ПФ1; g0 - отношение сигнал/помеха по напряжению на выходе ФНЧ1; gп - нормированный порог в РУ; gф - отношение сигнал/помеха по напряжению на выходе ПФ2.
После обнаружения сигнала по командам из РУ поиск по частоте прекращается за счет отключения управителя (Упр6) и начинается предварительная подстройка частоты Г2 за счет подключения управителя (Упр5), что соответствует второму этапу адаптации, в ходе которого обеспечивается предварительное устранение априорной неопределенности о частоте fs ФМС до тех пор, пока не достигается условие
fs-Δfг2(t)=fs0→fф1 при t0+Δt1≤t≤t0+Δt1+Δt2,
где Δt2 - длительность этапа предварительной подстройки частоты гетеродина Г2.
На данном этапе функционирования АМКФУ в качестве сигнала рассогласования используется напряжение на выходе ФНЧ2
Учитывая, что

U13(t)=Umг1cos[2πfг1t+φфвр1], получаем при
φфвр1=π/2; 
где T2 - постоянная времени накопления в ФНЧ2; U51(t) - напряжение на выходе
ПФ2; U13(t) - напряжение на выходе фазовращателя (Фвр1); δφ - фазовый сдвиг, обусловленный неидеальностью аппаратурной реализации АМКФУ; φфвр1 - фазовый сдвиг, вносимый Фвр1.
Для обеспечения инвариантности сигнала рассогласования к изменению амплитуды сигнала S(f) в делителе напряжений (Дел) осуществляется нормировка и при этом на выходе Дел при 2πfг1τлз+δφ=2πk, где k - целое число, имеем дискриминационную характеристику в виде
U16(t)=sin{2π[fs-fг2(t)]τлз}→0.
Поскольку дискриминационная характеристика корреляционно-фильтрового частотного дискриминатора в общем случае представляет периодическую функцию, то при этом возникает «проблема многозначности» при подстройке частоты Г2.
Для устранения многозначности необходимо, чтобы величина задержки выбиралась из условия
τлз=τ0=1/2Δfn.
Как показано в работе [1], среднеквадратичная флюктуационная погрешность подстройки частоты гетеродина Г2 σf1 может быть рассчитана из следующих соотношений:
σf1=1/S1gf1; S1=πΔfn; 
где S1 - крутизна дискриминационной характеристики при τ0=1/Δfn; gf1 - отношение сигнал/помеха по напряжению на выходе ФНЧ2.
После завершения этапа предварительной подстройки частоты гетеродина Г2 начинается третий этап адаптации, обеспечивающий классификацию принимаемого сигнала и оценивания тактовой частоты F и ширины спектра ФМС при оптимизации помехоустойчивости АМКФУ. С этой целью с РУ поступают команды на отключение управителей (Упр5 и Упр6) и подключение управителей (Упр2 и Упр3).
В ходе данного этапа адаптации осуществляется синхронная перестройка временного сдвига, вносимого линией задержки (ЛЗ) τлз(t) и средней частоты полосового фильтра (ПФ4)fф4(t).
Напряжение на выходе смесителя (См4) при наличии на входе АМКФУ только сигнала имеет вид:
где h(t) - импульсная реакция линейных цепей на выходе См4.
Учитывая, что
U21(t)=Umг2cos(2πfг1t+φфвр2) при 2πfг1τлз+δφ-φфвр2=2πk имеем

где I(τлз) - интеграл, величина которого зависит от τлз; φфвр2 - фазовый сдвиг, вносимый фазовращателем (Фвр2).
Энергетический спектр интеграла I(τлз) состоит из трех нормированных компонентов [4]:
G(f, τлз)=G1(f, τлз)+G2(f, τлз)+G3(f, τлз);

где G1(f, τлз) - спектр, 1-го компонента, представляющего собой постоянную составляющую выходного эффекта; G2(f, τлз) - спектр 2-го компонента, обладающего дискретным характером; С3(f, τлз) - спектр 3-го компонента, имеющего непрерывный характер, соответствующий «собственному шуму» ФМС.
Для выделения информации о тактовой частоте манипуляции F ФМС целесообразно использовать на выходе смесителя (См4) полосовой фильтр с регулируемой средней частотой (ПФ4) с импульсной реакцией
hф4(t)=2Δfф4sinc(πΔfф4t)cos(2πfф4t),
где Δfф4, fф4 - полоса пропускания и средняя частота полосового фильтра ПФ4.
В общем случае при априорной неизвестной частоте манипуляции F компонент
G2(f, τлз) на выходе ПФ4 не выделяется, поскольку fф4≠F. Это приводит к необходимости вышеупомянутой перестройки τлз(t) и fф4(t).
При реализации дискретно-шагового закона перестройки для
t0+Δt1+Δt2≤t≤t0+Δt1+Δt2+Тτ имеем:
τлз(t)=τ0+(i-1)Δτ; τ0=1/2Δfn; Δτ=Δfф4/2F(Fв-Δfф4);
fф4(t)=Fв-(i-1)Δfф4; F0=Δfn; i∈[1, nш]; Δf=Δfф4;
nш=(τлзв-τ0)/Δτ; Тτ=nшТ3; τлзв=1/2 Fн,
где Tτ - максимальный интервал времени, необходимый для реализации поисковых процедур [τлз(t), fф4(t)]; τ0, F0 - начальное значение τлз и fф4; Δτ, Δf - величина шага перестройки τлз и fф4; nш - максимально возможное количество шагов перестройки в процессе поиска; τлзв - верхняя граница диапазона перестройки τлз(t); Т3 - постоянная времени накопления фильтра нижних частот (ФНЧ3).
В процессе перестройки максимальное значение компонента G2(f, τлз) достигается при выполнении условий τлз(t)→Tэ/2→1/2F и fф4(f)∈[(F-ΔfФ4/2); (F+Δfф4/2)], необходимых для прекращения поиска.
Для классификации принятого сигнала S(t) в качестве информативного признака используется компонент G2(f, τлз), который характерен только для ФМС.
Алгоритм классификации ФМС имеет вид:
 при ti≤t≤ti+T3,
при ti≤t≤ti+T3,
где НФМ - гипотеза о приеме ФМС; U30(Т3) - напряжения на выходе фильтра нижних частот (ФНЧ3); U23(t) - напряжение на выходе ПФ4; Uпор3 - пороговое напряжение в пороговом устройстве (ПУ); ti - момент времени, соответствующий началу i-го шага перестройки ЛЗ и ПФ4.
При срабатывании ПУ в РУ поступает информация, соответствующая гипотезе
НФМ и оценке номера шага перестройки  по которой устанавливается оценка временного сдвига
по которой устанавливается оценка временного сдвига  и оценка средней частоты ПФ4
и оценка средней частоты ПФ4  ф4i. После этого с РУ на Упр2 и Упр3 подается команда на прекращение перестройки ЛЗ и ПФ4.
ф4i. После этого с РУ на Упр2 и Упр3 подается команда на прекращение перестройки ЛЗ и ПФ4.
С выхода ПУ подается также команда на подключение частотомера (Чр1) для оценки манипулирующей частоты  в течение интервала времени ТF, информация о которой подается в РУ.
в течение интервала времени ТF, информация о которой подается в РУ.
Третий этап обработки информации в АМКФУ реализуется за интервал времени Δt3=Tτ+ТF.
Вероятность ошибочных решений при классификации ФМС Ркл может быть рассчитана из соотношений [1]:
Ркл=0,5(β2+α2); β2=1-D2;  α2=1-Ф(gп2)
α2=1-Ф(gп2)
где β2, α2 - вероятности пропуска сигнала и ложной тревоги; gτ, gF - отношения сигнал/помеха по напряжению на выходе ФНЧ3 и ПФ4; gп2 - нормированный порог в ПУ.
При использовании счетчикового метода оценки частоты относительная среднеквадратичная флюктуационная погрешность оценивания частоты равна [5]:
σF/F=1/2πmgF, m=FTF,
где m - количество периодов манипулирующей частоты F за сеанс оценивания ТF.
В ходе четвертого этапа обработки информации в АМКФУ в начале осуществляется подстройка полосы пропускания в ПФ1 Δfф1 с целью ее согласования с оценкой ширины спектра сигнала  а затем производится уточнение оценок амплитуды
а затем производится уточнение оценок амплитуды  средней
средней  и манипулирующей
и манипулирующей  частот ФМС.
частот ФМС.
Для подстройки полосы пропускания ПФ2 с выхода РУ на управитель (Упр1) подается целеуказание, соответствующее 
В результате адаптации при обработке информации в АМКФУ погрешности оценивания параметров уменьшаются, поскольку полоса пропускания ПФ1 сокращается до  а крутизна дискриминационной характеристики Sт возрастает и становится равной
а крутизна дискриминационной характеристики Sт возрастает и становится равной 
С учетом вышеизложенного уточненные среднеквадратичные флюктуационные погрешности оценивания параметров ФМС могут быть рассчитаны при  из следующих соотношений:
из следующих соотношений:
σfт=1/Sтgfт; 
σFт/F=1/2πmgFт; 
где gот, gfr, gFт - отношения сигнал/помеха по напряжению на выходе ФНЧ1, ФНЧ2, ФНЧ3 после проведения адаптации и устранения влияния априорной неопределенности о частоте fs и ширине спектра Δfs ФМС.
Оценка частоты ФМС равна 
 - оценка частоты гетеродина Г2, которая фиксируется частотомером Чр2 в ходе четвертого этапа адаптации и передается в РУ. Четвертый этап обработки информации в АМКФУ реализуется за интервал времени Δt4=ГΔfф+Tf, где ТΔfф - время, необходимое для подстройки полосы пропускания ПФ1; Tf - время, необходимое для оценки частоты генератора Г2.
- оценка частоты гетеродина Г2, которая фиксируется частотомером Чр2 в ходе четвертого этапа адаптации и передается в РУ. Четвертый этап обработки информации в АМКФУ реализуется за интервал времени Δt4=ГΔfф+Tf, где ТΔfф - время, необходимое для подстройки полосы пропускания ПФ1; Tf - время, необходимое для оценки частоты генератора Г2.
В тех случаях, когда при оценивании частоты fs сигнала необходимо устранить аппаратурную погрешность, обусловленную нестабильностью ЛЗ, целесообразно периодически использовать пятый этап обработки информации в АМКФУ, обеспечивающий режим калибровки ЛЗ.
При этом по командам из РУ отключается ВТ и включается генератор стимулирующего сигнала (Гстс). В результате обработки стимулирующего сигнала на выходе устройства выделения сигнала ошибки (УВСО) формируется сигнал рассогласования, который через управляющий элемент (УЭ) осуществляет подстройку частоты генератора Г1 таким образом, чтобы выполнялось условие  что и обеспечивает устранение смещенности нуля дискриминационной характеристики за счет аппаратурного фазового сдвига δφ. Длительность пятого этапа Δt5 определяется постоянной времени УЭ Туэ. После завершения пятого этапа по командам с РУ Гстс отключается, а ВТ включается.
что и обеспечивает устранение смещенности нуля дискриминационной характеристики за счет аппаратурного фазового сдвига δφ. Длительность пятого этапа Δt5 определяется постоянной времени УЭ Туэ. После завершения пятого этапа по командам с РУ Гстс отключается, а ВТ включается.
Полная длительность сеанса обработки ФМС в АМКФУ равна
где Δtj - длительность j-го этапа функционирования АМКФУ.
Для иллюстрации полученных соотношений рассмотрим пример при следующих исходных данных: ΔF=6·107 Гц; Fн=106 Гц; Fв=107 Гц;  Δfn=2,5·107 Гц; Δfф1=2·107 Гц; T1=10-2 c; τ0=1/2Δfn=2·10-8 с; Т2=10-2 с; ТF=10-2 с; Т3=104 с; Δfф4=105 Гц.
Δfn=2,5·107 Гц; Δfф1=2·107 Гц; T1=10-2 c; τ0=1/2Δfn=2·10-8 с; Т2=10-2 с; ТF=10-2 с; Т3=104 с; Δfф4=105 Гц.
При использовании АМКФУ без адаптации в результате экспресс-анализа ФМС имеем:
D1=0,85; α1=10-5; σUms/Ums=0,2; σf1=105 Гц; Ркл=10-3; σF1=20 Гц; Тc=5·10-2 с.
При использовании АМКФУ адаптации при приеме ФМС с шириной спектра Δfs=2·106 Гц имеем:
D1а→1; α1=10-5; σUmsт/Ums=5·10-3; σfт=1,9·103 Гц; Ркл→0; σF2=1,5 Гц; Tc=10-1 с.
Таким образом, предлагаемое устройство обеспечивает оперативный радиомониторинг слабых широкополосных ФМС с расширением функциональных возможностей и снижением погрешностей оценивания основных параметров (Ums, F, fs) и повышением помехоустойчивости при обнаружении и классификации ФМС.
Реализация устройства не вызывает затруднений. Все его функциональные узлы являются типовыми и могут быть выполнены на основе современной элементной базы.
Источники информации
1. Дятлов А.П. Корреляционные устройства в радионавигации. Часть I, II. - Таганрог: ТРТИ, 1988.
2. Авт. св. СССР №936374, оп. БИ №22, 1982.
3. Свистов В.М. Радиолокационные сигналы и их обработка. - М.: Сов. Радио, 1977.
4. Спилкер Дж. Цифровая спутниковая связь. - М.: Связь, 1979.
5. Аппаратура для частотных и временных измерений. Под ред. А.П. Горшкова. - М.: Сов. Радио, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ КЛАССИФИКАТОР СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2008 |
|
RU2365052C1 |
| АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ НЕПРЕРЫВНЫХ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2007 |
|
RU2349923C1 |
| АДАПТИВНЫЙ ЭКСПРЕСС-АНАЛИЗАТОР ПАРАМЕТРОВ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2316774C1 |
| АВТОКОРРЕЛЯЦИОННОЕ УСТРОЙСТВО ВСКРЫТИЯ СПЕКТРАЛЬНО-ВРЕМЕННОЙ СТРУКТУРЫ СИГНАЛОВ ЦИФРОВЫХ СИСТЕМ СВЯЗИ | 2008 |
|
RU2365051C1 |
| Система для измерения вносимого фазового шума устройства высокочастотного, сверхвысокочастотного или оптического диапазонов | 2023 |
|
RU2807958C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА | 1992 |
|
RU2044327C1 |
| Устройство для измерения скорости изменения и нестабильности частоты частотно-модулированного сигнала генератора | 1980 |
|
SU901931A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 1992 |
|
RU2097925C1 |
| УЧЕБНЫЙ ПРИБОР ПО РАДИОТЕХНИКЕ | 2006 |
|
RU2302012C1 |
| Устройство для измерения средней скорости изменения частоты и линейности модуляционных характеристик частотно-модулированных генераторов | 1990 |
|
SU1705759A1 |
Изобретение относится к радиоизмерительной технике и радиосвязи и может быть использовано для определения параметров радиосигналов. Технический результат - расширение функциональных возможностей, повышение помехоустойчивости и классификации, а также снижение погрешностей измерения амплитуды, средней и тактовой частот фазоманипулированных сигналов. Для этого в состав адаптивного многофункционального корреляционно-фильтрового устройства, реализованного на основе частотного дискриминатора, дополнительно введены каналы поиска по частоте и обнаружения сигнала; канал адаптации по средней и тактовой частотам сигнала; канал классификации и точного измерения параметров сигнала. 1 ил.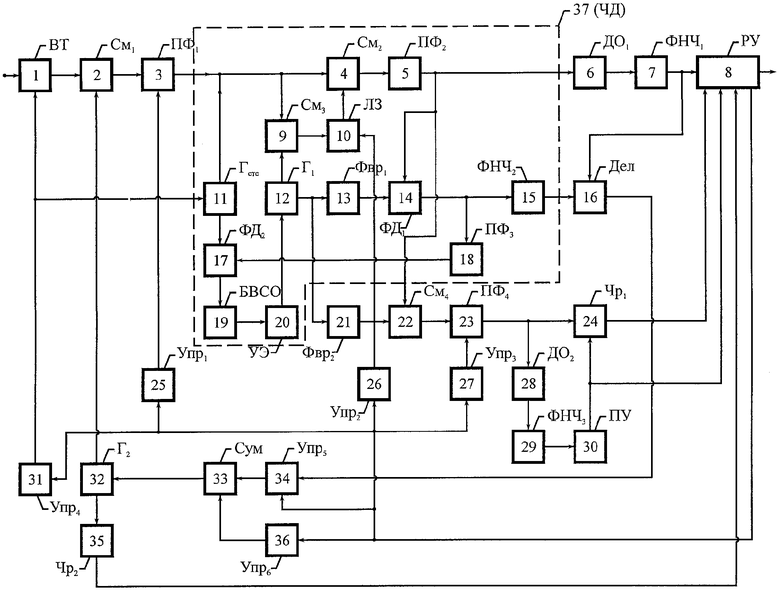
Адаптивное многофункциональное корреляционно-фильтровое устройство, содержащее два смесителя (4, 9), два полосовых фильтра (5, 18), линию задержки (10), фазовращатель (13), два фазовых детектора (14, 17), фильтр нижних частот (15), блок выделения сигнала ошибок (19), генератор гармонических колебаний (12), управляющий элемент (20), генератор стимулирующих сигналов (11), первый выход которого соединен со входом частотного дискриминатора (37), который соответствует выходу полосового фильтра (3), а второй выход генератора стимулирующих сигналов (11) соединен со входом второго фазового детектора (17); вход частотного детектора (37), то есть выход полосового фильтра (3), соединен с первым входом смесителя (4) и с первым входом смесителя (9), второй вход смесителя (4) соединен с выходом линии задержки (10), выход смесителя (4) соединен со входом полосового фильтра (5), а выход полосового фильтра (5) соединен со входом детектора огибающей (6), с первым входом фазового детектора (14) и с первым входом смесителя (22), второй вход смесителя (9) соединен с первым выходом генератора (12), а выход смесителя (9) соединен со входом линии задержки (10), второй выход генератора гармонических колебаний (12) соединен со входом фазовращателя (13), выход которого соединен со вторым входом фазового детектора (14), выход которого соединен со входами фильтра нижних частот (15) и полосового фильтра (18); выход фильтра нижних частот (15) является выходом частотного дискриминатора (37), выход полосового фильтра (18) соединен со вторым входом фазового детектора (17), выход которого соединен со входом блока выделения сигнала ошибок (19), выход которого соединен со входом управляющего элемента (20), выход которого соединен с управляющим входом генератора гармонических колебаний (12), отличающееся тем, что в него введены входной тракт (1), смеситель (2), перестраиваемый по частоте генератор (32), полосовой фильтр с регулировкой полосы пропускания (3), детектор огибающей (6), фильтр нижних частот (7), решающее устройство (8), управитель (36); делитель напряжений (16), фазовращатель (21), смеситель (22), полосовой фильтр с регулировкой средней частоты (23), детектор огибающей (28), фильтр нижних частот (29), пороговое устройство (30), частотомер (24), управители (26, 27); управители (25, 31, 34), сумматор (33), частотомер (35), причем вход входного тракта (1) является входом заявляемого устройства, а выход входного тракта (1) соединен с первым входом смесителя (2), второй вход которого соединен с первым выходом управляемого по частоте генератора (32), выход смесителя (2) соединен со входом полосового фильтра с регулируемой полосой пропускания (3), вход детектора огибающей (6) соединен с выходом полосового фильтра (5), а выход детектора огибающей (6) соединен со входом фильтра нижних частот (7), выход которого соединен с первым входом решающего устройства (8) и вторым входом делителя напряжений (16), второй вход решающего устройства (8) соединен с выходом первого частотомера (24), третий вход решающего устройства (8) соединен с выходом порогового устройства (30), четвертый вход решающего устройства (8) соединен с выходом частотомера (35), управляющий выход решающего устройства (8) соединен со входами управителей (25, 26, 27, 31, 34, 36), выход фильтра нижних частот (15) соединен с первым входом делителя напряжений (16), выход которого соединен со входом управителя (34), вход фазовращателя (21) соединен со вторым выходом генератора гармонически колебаний (12), а выход фазовращателя (21) соединен со вторым входом смесителя (22), выход которого соединен со входом полосового фильтра с регулируемой средней частотой (23), выход которого соединен со входами частотомера (24) и входом детектора огибающей (28), выход которого соединен со входом фильтра нижних частот (29), выход которого соединен со входом порогового устройства (30), выход порогового устройства (30) соединен с управляющим входом частотомера (24) и вторым входом решающего устройства (8), выход управителя (25) соединен с управляющим входом фильтра (3), выход управителя (26) соединен с управляющим входом линии задержки (10), выход управителя (31) соединен с управляющими входами входного тракта (1) и генератора стимулирующих сигналов (11), второй выход управляемого по частоте генератора (32) соединен со входом частотомера (35), выход делителя напряжений (16) соединен со входом управителя (34), выход управителя (34) соединен с первым входом сумматора (33), выход управителя (36) соединен со вторым входом сумматора (33), выход сумматора (33) соединен с управляющим входом генератора (32).
| Частотный дискриминатор | 1979 |
|
SU936374A1 |
| Устройство для определения класса радиосигналов | 1988 |
|
SU1503024A1 |
| Устройство для измерения средней частоты частотно-манипулированных сигналов | 1984 |
|
SU1237985A1 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ПЕРЕДАЧИ ИНФОРМАЦИИ В МНОГОЛУЧЕВОМ КАНАЛЕ | 1996 |
|
RU2118052C1 |
| Канатное почтовое транспортное устройство | 1934 |
|
SU44833A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| Частотный дискриминатор | 1985 |
|
SU1427556A1 |
| АДАПТИВНЫЙ ЦИФРОВОЙ ЧАСТОТНЫЙ ДИСКРИМИНАТОР | 2000 |
|
RU2166773C1 |

