Изобретение относится к области автоматики, телемеханики и связи и может быть использовано в автоблокировке и обеспечении безопасности движения поездов на перегонах скоростных, магистральных и малодеятельных участков железной дороги.
Аналогом заявляемого изобретения, по совокупности существенных признаков и функциональным возможностям, является устройство микропроцессорной автоблокировки (патент РФ на изобретение №2354574 от 02.07.07 г.), содержащее микропроцессорные приемопередатчики сигналов контроля состояния рельсовой линии и автоматической локомотивной сигнализации, связанные с рельсовой линией, с огнями путевых светофоров, со схемами электрической централизации и между собой, а также с автоматизированным рабочим местом электромеханика, которое принимает и отображает диагностическую информацию о техническом состоянии аппаратуры сигнальных точек и информацию о поездном положении на перегоне, автоматизированное рабочее место дежурного по станции, CAN-интерфейсы, станционные и перегонные приемопередатчики сигналов управления автоматической переездной сигнализации, приемопередатчик радиоканала и управляющий приемопередатчик сигналов взаимодействия компонентов системы, один вход/выход которого через один CAN-интерфейс подключен к входу/выходу автоматизированного рабочего места дежурного по станции, а другой вход/выход через другой CAN-интерфейс соединен с одним входом/выходом станционного приемопередатчика сигналов управления автоматической переездной сигнализации, с входом/выходом приемопередатчика радиоканала, с входом/выходом автоматизированного рабочего места электромеханика и с входами/выходами вышеупомянутых приемопередатчиков сигналов контроля состояния рельсовой линии и автоматической локомотивной сигнализации, а другой вход/выход станционного приемопередатчика сигналов автоматической переездной сигнализации соединен с входом/выходом перегонного приемопередатчика сигналов автоматической переездной сигнализации, выход которого связан с аппаратурой переезда.
Основными недостатками данного устройства являются те, что оно имеет большое количество рельсовых линий (РЛ) на перегоне, сигналы автоматической локомотивной сигнализации (АЛС) кодируются только с передающих концов РЛ, малая длина РЛ и перегона. Нет возможности централизованного управления переездом на многопутных участках. Модули, входящие в устройство, не программируются и не конфигурируются через интерфейс. Генератор комплексных сигналов и модуль приемника перегонного объединены в один блок - блок сигналов контроля состояния рельсовой линии (КРЛ). Не обеспечивается безопасный обмен данными между компонентами системы и комплектами оборудования, установленными на соседних станциях.
Технические результаты заявляемого изобретения заключаются в расширении функциональных возможностей, организации безопасного обмена данными между компонентами системы интервального регулирования движения поездов (далее Система) на разных путях одного перегона, в осуществлении более глубокой диагностики, перенастройки и перепрограммирования любого модуля Системы, объединении всех путей одного перегона, уменьшении количества аппаратуры в Системе.
Технический результат достигается тем, что Система представляет собой открытую систему реального времени с модульной архитектурой. Система состоит хотя бы из двух комплектов оборудования автоблокировки (далее автоблокировка), предназначенных для одного пути и установленных на каждой из двух соседних станций, ограничивающих перегон.
Структурно автоблокировка разделена на три иерархических уровня и выполнена в виде блоков и модулей. Первый уровень содержит блоки, работающие напрямую с исполнительными устройствами - блок управления светофором перегонный (БУСП), блок переездной сигнализации перегонный (БПСП) и путевые трансформаторы (ПТ), размещаемыми в непосредственной близости к железнодорожным путям, и соединяемые с элементами второго уровня по кабельным линиям. Второй уровень включает в себя модули, отвечающие за работу с исполнительными устройствами: модули управления светофором (МУС) и автоматической переездной сигнализацией (МАПС), модуль приемника перегонного (МПП), генератор комплексных сигналов (ГКС) и безопасный коммутатор сигналов (БКС), соединяемые через согласующее устройство (УС) и ПТ с рельсовой линией (РЛ). Устройства второго уровня осуществляют связь блоков первого уровня с модулями третьего уровня. Третий уровень состоит из модулей, обеспечивающих алгоритм работы автоблокировки, ее диагностику и взаимодействие с другими автоблокировками и Системами, а также для обмена дискретными сигналами с системой электрической централизации (ЭЦ). Третий уровень содержит модуль управления (МУ), автоматическое рабочее место электромеханика (АРМ ШН) с модулем подключения к АРМ ШН (МАРМ ШН), модуль связи с соседней станцией (МСС) и модуль интерфейса с электрической централизацией (МЭЦ). Блоки и модули автоблокировки взаимодействуют между собой посредством двух интерфейсов - системного и информационно-диагностического. Системный интерфейс - двухканальный, обеспечивающий связь между аппаратурой второго и третьего уровней. В каждом модуле для обеспечения безопасности происходит сравнивание информации в каналах интерфейса. Информационно-диагностический интерфейс - дополнительный интерфейс, обеспечивающий возможность глубокой диагностики модулей и сервисные функции в т.ч. перенастройку и перепрограммирование любого модуля автоблокировки. При этом каждый модуль автоблокировки циклически выдает в информационно - диагностический интерфейс информацию о своем состоянии и результаты своей работы. Для осуществления связи между станционным оборудованием и автоблокировками одного пути перегона и автоблокировками всех путей перегона в систему введены двухканальный межсистемный интерфейс (МСИ) и внешний информационный интерфейс (ВИИ). МСИ предназначен для информационного объединения через МУ автоблокировок всех путей одного перегона между собой и с модулем радиоканала и реального времени (МРКиРВ), а через модуль диспетчерской централизации (МДЦ) с линейным пунктом диспетчерской централизации (ЛП ДЦ), с модулем подключения к автоматическому рабочему месту дежурного по станции (МАРМ ДСП). ВИИ предназначен для информационного объединения АРМ ШН автоблокировок всех путей одного перегона между собой и с АРМ ДСП, и через модуль диспетчерского контроля (МДК) с контрольным пунктом диспетчерского контроля (КП ДК).
Безопасный коммутатор сигналов (БКС) осуществляет контроль состояния коммутирующих ключей и при выявлении отказа переводит их в закрытое состояние. БКС содержит центральный обработчик, состоящий из двух независимых каналов обработки, соединенный одним входом/выходом с ячейкой безопасного сравнения, а другим входом/выходом с ячейкой коммутаторов, и блок питания, подключенный к центральному обработчику и ячейке коммутаторов, при этом сигнал контрольной частоты с выхода ячейки безопасного сравнения через блок питания подается на ячейку коммутаторов.
Все модули разработаны с использованием программируемой элементной базы.
Сущность предложенного технического решения поясняется чертежами. На фиг.1 представлена структурная схема комплекта оборудования автоблокировки. На фиг.2 - структурная схема системы интервального регулирования движения поездов, которая устанавливается на каждой из двух соседних станциях, ограничивающих перегон. На фиг.3 - структурная схема безопасного коммутатора сигналов.
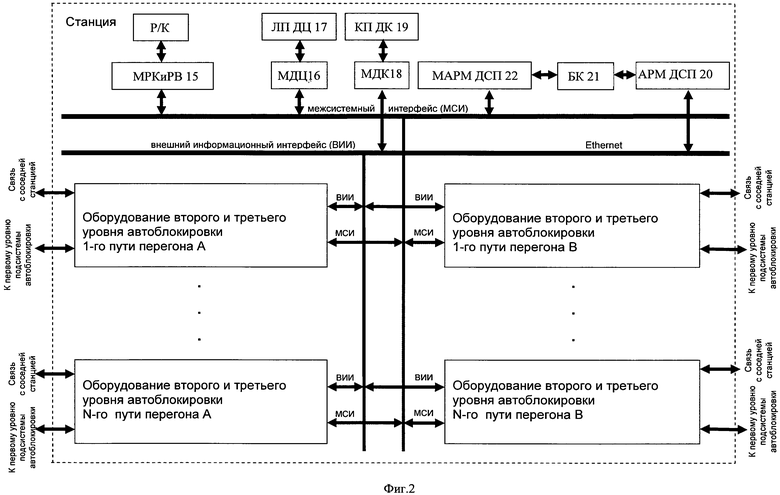
На фиг.1 представлена структурная схема автоблокировки, предназначенной для одного пути перегона. Структурно автоблокировка разделена на три иерархических уровня и выполнена в виде блоков и модулей. Первый уровень содержит: блок управления светофором перегонный 1 (БУСП), предназначенный для управления и контроля одного перегонного или одного переездного светофора; блок управления переездной сигнализации перегонный 2 (БПСП), осуществляющий управление исполнительными устройствами переездной сигнализации и контроля ее исправности, и путевой трансформатор 3 (ПТ).
Второй уровень представлен станционными устройствами, отвечающими за работу с устройствами первого уровня и осуществляющими связь блоков первого уровня с аппаратурой третьего уровня по системному интерфейсу. Модуль управления светофором 4 (МУС) работает совместно с блоком 1 БУСП. Модуль управления автоматической переездной сигнализацией станционный 5 (МАПС) организует взаимодействие устройств системы третьего уровня с аппаратурой переездной сигнализации на охраняемых переездах и работает совместно с блоком 2 БПСП. Модуль приемника перегонного 6 (МПП), предназначен для приема сигналов КРЛ от смежных РЛ. Генератор (передатчик) комплексных сигналов 7 (ГКС) предназначен для формирования, усиления и передачи в РЛ сигналов АЛС и КРЛ. Безопасный коммутатор сигналов 8 (БКС), соединяемый через согласующее устройство 9 (УС) и ПТ 3 с РЛ, предназначенный для коммутации входного аналогового сигнала, поступающего с ГКС 7, на один из нескольких выходов, обеспечивает контроль состояния коммутирующих ключей и при выявлении отказа переводит их в закрытое состояние.
Третий уровень включает в себя элементы оборудования, обеспечивающие алгоритм работы как автоблокировки, ее диагностику и взаимодействие с другими автоблокировками, так и всей Системы в целом. Третий уровень содержит автоматизированное рабочее место электромеханика 10 (АРМ ШН), предназначенное для визуального отображения состояния полуперегона, настройки параметров работы блоков ГКС 7 и МПП 6, настройки конфигурации перегона, ведения журналов диагностики блоков и модулей автоблокировки, получаемых по информационно-диагностическому интерфейсу, и сообщений с системного интерфейса.
Для организации безопасного обмена данными с фильтрацией сообщений между элементами автоблокировки по информационно-диагностическому интерфейсу предназначен модуль подключения 11 (МАРМ ШН) к АРМ 10 ШН. МАРМ 11 ШН представляет собой шлюз с односторонней передачей данных из системного интерфейса автоблокировки на АРМ 10 ШН и двухсторонней передачей данных между АРМ 10 ШН и информационно-диагностическим интерфейсом.
Модуль интерфейса с электрической централизацией 12 (МЭЦ) предназначен для подачи управляющих воздействий на устройства электрической централизации (ЭЦ) и контроля их состояния.
Модуль связи с соседней станцией 13 (МСС) осуществляет передачу данных между автоблокировками разных станций на одном пути перегона по одномодовой оптоволоконной линии.
Модуль управления 14 (МУ), состоящий из двух центральных процессоров, реализующих два канала обработки информации. Двухканальное исполнение устройства необходимо для обеспечения гальванической и информационной развязки. Информационную развязку осуществляет программное обеспечение устройства. Информационная развязка гарантирует отсутствие ненужных данных в интерфейсах, тем самым обеспечивая максимальную информативность в переданных данных, отсутствие ненужных данных в интерфейсах, тем самым обеспечивая максимальную информативность в переданных данных.
Через информационно-диагностический интерфейс МУ 14 связан со всеми модулями и блоками автоблокировки.
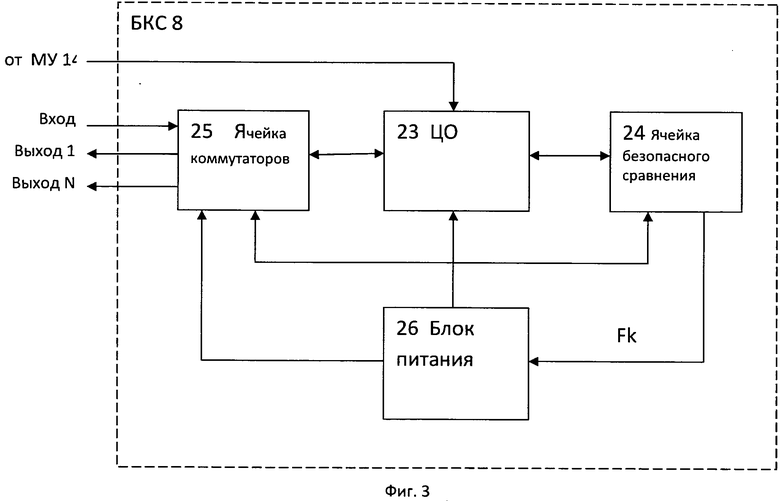
Система интервального регулирования движения поездов (фиг.2) содержит хотя бы два комплекта оборудования автоблокировки, предназначенных для одного пути перегона. Для осуществления связи между станционным оборудованием и автоблокировками одного пути перегона и автоблокировками всех путей перегона в систему введены двухканальный межсистемный интерфейс (МСИ) и внешний информационный интерфейс (ВИИ). Система содержит модуль радиоканала и реального времени 15 (МРКиРВ), модуль диспетчерской централизации 16 (МДЦ), подключаемый к линейному пункту диспетчерской централизации 17 (ЛП ДЦ). Функционально модуль 16 МДЦ представляет собой мост между МСИ одного или нескольких автоблокировок, установленных на одной станции, и аппаратурой ЛП 17 ДЦ. Модуль диспетчерского контроля 18 (МДК), соединяемый с контрольным пунктом диспетчерского контроля 19 (КП ДК). Автоматизированное рабочее место дежурного по станции 20 (АРМ ДСП), предназначенное для визуального отображения состояния перегона, ведения журналов диагностики и сообщений из МСИ. АРМ 20 ДСП подключают через безопасную клавиатуру 21 (БК) к модулю подключения 22 (МАРМ ДСП). МАРМ ДСП 22 обеспечивает безопасный обмен данными между одной или несколькими автоблокировками, установленными на одной станции и объединенными по МСИ с АРМ ДСП 20. БК 21 предназначена для ввода ответственных команд дежурного по станции.
МУ 14 по МСИ связан с одними входами/выходами модулей МРКиРВ 15 и МДЦ 16, МАРМ 22 ДСП, с одним из МУС 4 и МАПС 5.
БКС 8 (фиг.3) содержит центральный обработчик 23 (типа контроллера), состоящий из двух независимых каналов обработки, соединенный одним входом/выходом с ячейкой безопасного сравнения 24, а другим входом/выходом с ячейкой коммутаторов 25, и блок питания 26. БКС 8 вводят опционально для обеспечения коммутации сигналов АЛС, что позволяет кодировать сигнал как с передающих, так и с приемных концов РЛ.
Система работает следующим образом.
Блок 1 БУСП принимает из физической линии команды от модуля МУС 4 на включение/выключение сигнальных показаний на светофоре и формирует питающее напряжение постоянного тока для светофорных ламп или светодиодных светооптических систем из питающего постоянного напряжения, поступающего из физической линии. Модуль МУС 4 получает и передает контрольную информацию о состоянии светофора и блока БУСП 1 в системный интерфейс, а необходимую диагностическую информацию в информационно-диагностический интерфейс.
Блок БПСП 2 обеспечивает прием команд управления на закрытие и открытие переезда, формируемых модулем МАПС 5, и выдачу соответствующего управляющего сигнала автоматической переездной сигнализации (АПС). Блок БПСП 2 перекрывает переезд при выявлении опасных отказов и автоматически переключает без нарушения нормальной работы на резервный источник питания при отключении или низком напряжении на основной питающей линии. Модуль МАПС 5 принимает команды управления на закрытие и открытие переезда, поступающие по межсистемному интерфейсу, и передает их соответствующему модулю БПСП 2 по двум кабельным двухпроводным линиям, а также принимает диагностические данные от блока БПСП 2 по двум кабельным двухпроводным линиям и передает их в межсистемный интерфейс.
Автоблокировка имеет независимые, разделенные конструктивно в виде отдельных устройства ГКС 7 и МПП 6, что обеспечивает их использование в качестве станционных и перегонных передатчиков и приемников, соответственно, в различных количественных сочетаниях. Позволяет создавать централизацию, т.е. использовать на станции с большим числом РЛ один ГКС 7 и к нему подключать несколько МПП 6.
ГКС 7 осуществляет кодирование в РЛ сигналов контроля состояния рельсовой линии (КРЛ) с передающего конца РЛ для определения свободности/занятости РЛ, а также сигналов АЛС с передающей стороны и через УС 9 и ПТ 3 с приемной стороны РЛ. Возможность передачи АПС дополнительно через приемные концы РЛ позволяет увеличить длину РЛ, а следовательно, уменьшить количество РЛ и аппаратуры, осуществляющей кодирование этих РЛ на перегоне.
БКС 8 осуществляет переключение сигнала ГКС 7 на один из двух своих выходов с контролем состояния коммутирующих ключей и при выявлении отказа переводит их в закрытое состояние. Использование БКС 8 совместно с ГКС 7 на перегоне увеличивает длину РЛ и уменьшает количество аппаратуры в Системе.
С МУ 14 по системному интерфейсу подается команда на БКС 8 для переключения входного сигнала от ГКС 7 на один из нескольких выходов БКС 8, подключенных к РЛ через УС 9. Сигнал поступает на ЦО 23. Синхронность работы двух каналов и идентичность выходных данных отслеживает ячейка безопасного сравнения 24, которая в случае идентичных выходных данных с ЦО 23 обеспечивает выработку безопасного сигнала управления - сигнал контрольной частоты Fk, который проходит через блок питания 26 на ЦО 23 и ячейку коммутаторов 25. Для формирования сигнала контрольной частоты Fk требуется наличие разового импульса запуска и постоянной тактовой частоты на входе ячейки 24, динамические сигналы на контрольных точках должны быть противофазными. Любой сдвиг по фазе противофазных динамических сигналов, или несовпадение выходных данных с ЦО 23, или отсутствие тактовой частоты приведут к прекращению формирования контрольной частоты Fk и формированию сигнала перезапуска (сброса) на ЦО 23. Прекращение формирования сигналов контрольной частоты Fk приведет к закрыванию всех каналов ячейки коммутаторов 25 и перезапуску БКС 8.
МУ 14 предназначен для:
- выполнения логических зависимостей как автоблокировки, так и Системы в целом;
- сбора и хранения информации о сбоях и отказах, произошедших в аппаратуре первого и второго уровней автоблокировки;
- приема и обработки сигналов контроля состояния всех объектов на перегоне (рельсовые цепи, переезды, светофоры, бортовые устройства управления и обеспечения безопасности движения поездов) и сигналов от других устройств и систем СЦБ, поступающих от модулей МУС 4, МАПС 5, МПП 6, ГКС 7, БКС 8 и МСС 13;
- приема и обработки управляющих сигналов от модулей АРМ 10 ШН, МЭЦ 12;
- формирования и передачи управляющих сигналов на модули МУС 4, МАПС 5, МПП 6, ГКС 7, БКС 8, МЭЦ 12 и МСС 13 (кодирование рельсовых цепей, включение ламп светофоров, формирование информации для передачи на локомотив по радиоканалу, открытие и закрытие переездов, смена направления, увязка с ЭЦ и диспетчерской централизацией (ДЦ));
- формирования и передачи информационно-диагностических сообщений на модуль МАРМ 11 ШН (исправность автоблокировки, состояние объектов управления и контроля на перегоне и их режимы работы).
МУ 14 одной автоблокировки получает информацию от аналогичного МУ другой автоблокировки с соседней станции через модуль МСС 13 от МПП 6 и ГКС 7, через модуль МАПС 5 своей автоблокировки, контролирует проследование поезда и освобождение блок-участков перегона.
МУ 14 управляет аппаратурой АПС и контролирует ее состояние, передавая сигнал на блок 2 БПСП по системному интерфейсу через модуль МАПС 5.
МРКиРВ 15 обеспечивает получение координат подвижных объектов железной дороги, передачу данных по радиоканалу и синхронизацию времени по данным спутниковой навигационной системы (СНС).
МДЦ 16 предназначен для организации интерфейса безопасного обмена данными с фильтрацией сообщений между Системой и аппаратурой ЛП ДЦ 17.
МДК 18 обеспечивает взаимодействие автоблокировки посредством АРМ 10 ШН с аппаратурой КП 19 ДК и передачей на нее диагностической информации о текущем состоянии всех диагностируемых блоков и модулей Системы с регистрацией сбоев и отказов в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491199C1 |
| УСТРОЙСТВО МИКРОПРОЦЕССОРНОЙ АВТОБЛОКИРОВКИ | 2007 |
|
RU2354574C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| Микропроцессорная система автоблокировки с децентрализованным размещением аппаратуры | 2022 |
|
RU2784240C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| Способ и система диагностирования автоматической блокировки и система диспетчерской централизации управления движением поездов | 2018 |
|
RU2672822C1 |
| Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги | 2016 |
|
RU2622522C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА АВТОБЛОКИРОВКИ | 2008 |
|
RU2388636C2 |
| Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами | 2016 |
|
RU2622316C1 |
Изобретение относится к автоматике, телемеханике и связи на железнодорожном транспорте. Система интервального регулирования движения поездов состоит из комплектов оборудования автоблокировки, каждый из которых содержит соединенные между собой модуль управления, модуль интерфейса с электрической централизацией, генератор комплексных сигналов и модуль приемника перегонного. Также имеются блоки управления светофором, блоки управления автоматической переездной сигнализацией, модуль межстанционной связи, согласующее устройство, автоматизированные рабочие места и модуль радиоканала и реального времени. Дополнительно введены межсистемный интерфейс, внешний информационный интерфейс, модуль диспетчерской централизации, модуль диспетчерского контроля и модуль подключения автоматизированного рабочего места дежурного по станции. В автоблокировку введены информационно-диагностический интерфейс, генератор комплексного сигнала и модуль приемника перегонного. Решение направлено на расширение функциональных возможностей. 1 з.п. ф-лы, 3 ил.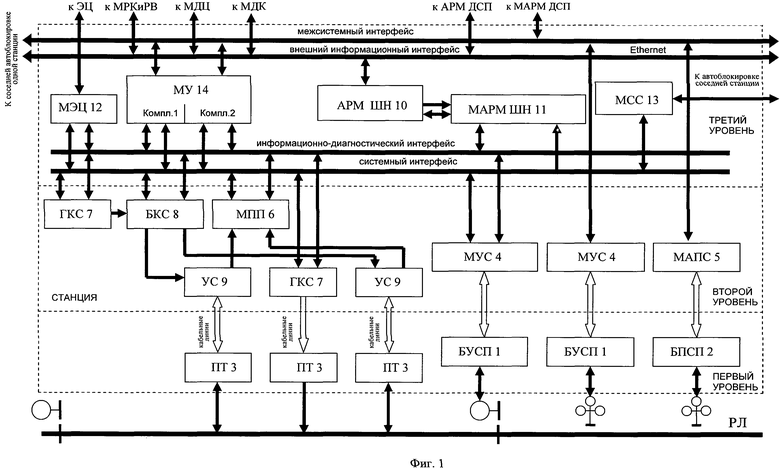
1. Система интервального регулирования движения поездов, состоящая хотя бы из двух комплектов оборудования автоблокировки (далее автоблокировка), каждый из которых содержит соединенные между собой кабелями системного интерфейса модуль управления, модуль интерфейса с электрической централизацией, генератор комплексных сигналов, соединенный с началом рельсовой линии, и модуль приемника перегонного, соединенный с концом рельсовой линии, станционный и перегонный блоки управления светофором, станционный и перегонный блоки управления автоматической переездной сигнализацией, модуль межстанционной связи, согласующее устройство, автоматизированные рабочие места дежурного по станции и электромеханика и модуль радиоканала и реального времени, обеспечивающий получение координат подвижных объектов железной дороги, передачу данных по радиоканалу и синхронизацию времени, отличающаяся тем, что дополнительно включает двухканальный межсистемный интерфейс, внешний информационный интерфейс, модуль диспетчерской централизации, представляющий собой шлюз между межсистемным интерфейсом и одной или несколькими автоблокировками, установленными на одной станции, и обеспечивающий безопасный обмен данными с фильтрацией сообщений между системой и линейным пунктом диспетчерской централизации, модуль диспетчерского контроля, обеспечивающий передачу диагностической информации о текущем состоянии блоков и модулей автоблокировок с регистрацией сбоев и отказов в реальном масштабе времени с внешнего информационного интерфейса на контрольный пункт диспетчерского контроля, модуль подключения автоматизированного рабочего места дежурного по станции, обеспечивающего безопасный обмен данными между одной или несколькими автоблокировками, установленными на одной станции и объединенными по межсистемному интерфейсу через безопасную клавиатуру с автоматизированным рабочим местом дежурного по станции, причем в автоблокировку введены информационно-диагностический интерфейс, соединенный со всеми блоками и модулями автоблокировки и обеспечивающий их программирование и конфигурирование, модуль подключения к автоматизированному рабочему месту электромеханика, предназначенный для организации безопасной передачи данных из системного интерфейса автоблокировки на автоматизированное рабочее место электромеханика и двухсторонней передачи данных с фильтрацией сообщений между автоматизированным рабочим местом электромеханика и информационно-диагностическим интерфейсом, генератор комплексного сигнала и модуль приемника перегонного выполнены в виде отдельных устройств.
2. Система по п.1, отличающаяся тем, что автоблокировка включает в себя безопасный коммутатор сигналов, содержащий центральный обработчик, состоящий из двух независимых каналов обработки, соединенный одним входом/выходом с ячейкой безопасного сравнения, а другим входом/выходом с ячейкой коммутаторов, и блок питания, подключенный к центральному обработчику и ячейке коммутаторов, при этом сигнал контрольной частоты с выхода ячейки безопасного сравнения через блок питания подается на ячейку коммутаторов.
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| Машина для автоматической мойки сушки и стабилизации температуры металлических изделий | 1950 |
|
SU93766A1 |
| Способ и долото для отбора ориентированного керна из бурящихся скважин | 1949 |
|
SU78757A1 |
| УСТРОЙСТВО ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 1992 |
|
RU2048346C1 |
| УСТРОЙСТВО МИКРОПРОЦЕССОРНОЙ АВТОБЛОКИРОВКИ | 2007 |
|
RU2354574C2 |

