Изобретение относится к средствам позиционирования рабочего инструмента с обеспечением стабильного его силового воздействия на обрабатываемую поверхность и может использоваться, в том числе и манипуляционными устройствами, для очистки и обработки поверхностей деталей на различных этапах технологического процесса, в частности, для удаления со сложных по конфигурации поверхностей деталей оксидных пленок (окалины, ржавчины) и загрязнений, для нанесений защитных покрытий, для удаления заусениц и т.д.
Известно устройство стабилизации силового воздействия на обрабатываемую поверхность, содержащее нагружатель для силового воздействия на деталь и систему его управления (см. авторское свидетельство СССР 931437, МКИ В24В 49/16, 1982 г.).
К недостаткам этого известного технического решения относятся сложность создания и управления силовым воздействием на обрабатываемую деталь, что приводит к низкому быстродействию устройства. Кроме того, использование контактного способа передачи нагрузки через ролик приводит к возникновению больших погрешностей, зависящих от шероховатости соприкасающихся поверхностей, их макрогеометрии и других составляющих.
Известно также устройство стабилизации силового воздействия на обрабатываемую поверхность, включающее инструмент и аэростатический нагружатель, выполненный в виде подключенного к источнику сжатого воздуха цилиндра, в полости которого с возможностью возвратно-поступательного движения размещен поршень (см. патент РФ №2185271, 2002 г.).
К недостаткам этого устройства относится большая сложность конструкции и ограниченные возможности его использования при обработке поверхностей изделий сложной формы, обладающих высокой жесткостью, поскольку для регулирования силового воздействия на деталь используется прогиб ее поверхности под действием инструмента. При этом инструмент и средство стабилизации его давления на обрабатываемую поверхность должны находиться с разной стороны обрабатываемой детали. Это часто осуществить не удается.
Задача, на решение которой направлено предлагаемое техническое решение, выражается в обеспечении возможности регулирования и стабилизации силы давления рабочего инструмента на сложную пространственную обрабатываемую поверхность независимо от жесткости этой поверхности.
Технический результат, который достигается при решении поставленной задачи, выражается в упрощении конструкции и повышении точности обработки поверхности. При этом обеспечивается возможность стабилизации силы давления рабочего инструмента на сложную пространственную обрабатываемую поверхность независимо от ее жесткости при размещении рабочего инструмента и средства стабилизации поджимающих усилий с одной стороны обрабатываемой поверхности.
Поставленная задача решается тем, что устройство стабилизации силового воздействия на обрабатываемую поверхность, включающее инструмент и аэростатический нагружатель, выполненный в виде подключенного к источнику сжатого воздуха цилиндра, в полости которого с возможностью возвратно- поступательного движения размещен поршень, отличающееся тем, что цилиндр разделен поршнем на две полости, первая из которых выполнена герметичной и снабжена первым сквозным отверстием, предпочтительно размещенным на торце цилиндра, и связана посредством гибкого шланга с полостью источника сжатого воздуха, снабженного средством изменения давления, например насосом, при этом вторая полость цилиндра сообщена с атмосферой через второе сквозное отверстие, предпочтительно размещенное на втором торце цилиндра, дополнительно снабженном третьим сквозным отверстием, через которое пропущен шток, один конец которого скреплен с поршнем, а второй - с инструментом.
Сопоставительный анализ совокупности существенных признаков предлагаемого технического решения и совокупности существенных признаков прототипа и аналогов свидетельствует о его соответствии критерию «новизна».
При этом совокупность существенных признаков отличительной части формулы изобретения обеспечивает возможность регулирования и стабилизации давления в герметичной полости поршня, которое поджимает рабочий инструмент к обрабатываемой поверхности прямо пропорционально требуемой величине его силового воздействия на эту обрабатываемую поверхность. Это достигается за счет обеспечения соответствия возможных малых перемещений поршня (во время пространственного движения инструмента при выполнении рабочих операций), вызванных возможными ошибками пространственного позиционирования инструмента относительно обрабатываемой поверхности, минимальным изменением объема сжатого воздуха, а следовательно, и величины его давления на поршень. В свою очередь, это обеспечивает сохранение заданного силового воздействия рабочего инструмента на обрабатываемую поверхность даже при незначительных ошибках пространственного позиционирования инструмента относительно обрабатываемой поверхности, что значительно повышает точность обработки.
На фиг.1 показана схема устройства, а на фиг.2 - аэростатический нагружатель.
Устройство стабилизации силового воздействия на обрабатываемую поверхность включает инструмент 1 и аэростатический нагружатель, выполненный в виде цилиндра 2, в полости которого с возможностью возвратно-поступательного движения размещен поршень 3. Цилиндр 2 разделен поршнем 3 на две полости, первая 4 из которых выполнена герметичной и снабжена первым сквозным отверстием 5, предпочтительно размещенным на торце цилиндра 2, и связана посредством гибкого шланга 6 с полостью источника сжатого воздуха 7, снабженного средством изменения давления 8, например насосом. Вторая полость 9 цилиндра 2 сообщена с атмосферой через второе сквозное отверстие 10, предпочтительно размещенное на втором торце цилиндра 2, дополнительно снабженном третьим сквозным отверстием 11, через которое пропущен шток 12, один конец которого скреплен с поршнем 3, а второй - с инструментом 1. Кроме того, на чертеже показаны обрабатываемая поверхность 13 и манипулятор 14, представляющий собой разомкнутую цепь, перемещающий аэростатический нагружатель (цилиндр 2) с инструментом 1 по любой пространственной траектории с относительно высокой динамической точностью.
Устройство стабилизации силового воздействия на обрабатываемую поверхность работает следующим образом.
При поступлении воздуха от источника 7 через шланг 6 и первое технологическое отверстие 5 в первую полость 4 цилиндра 2 поршень 3 с рабочим инструментом 1 максимально выдвигается до касания с противоположным торцом цилиндра 2 (правый торец на фиг.1). При этом воздух из второй полости 9 цилиндра 2 выходит через второе сквозное отверстие 10 в атмосферу. В этом положении манипулятор 14 перемещает инструмент 1 к обрабатываемой поверхности 13, которая может иметь произвольную плавную кривизну. После контакта инструмента 1 с обрабатываемой поверхностью 13 манипулятор 14 совершает небольшое дополнительное движение в направлении этой поверхности. При этом поршень 3 отходит от правого торца цилиндра 2 и занимает промежуточное положение между двумя торцами этого цилиндра. В этом положении, которое считается исходным, в первой полости 4 цилиндра 2 создается такое давление Р сжатого воздуха, которое обеспечивает заданное усилие F со стороны инструмента 1 на обрабатываемую поверхность 13. Это усилие соответствует выражению F=S·Р-S1Р1, где S=const - площадь поршня со стороны повышенного рабочего давления, P1=const - атмосферное давление, S1=const - площадь поршня со стороны инструмента.
При перемещении манипулятора 14 с инструментом 1 вдоль обрабатываемой поверхности 12 за счет постоянно присутствующей динамической ошибки слежения инструмент 1, а следовательно, и шток 12 с поршнем 3, будут постоянно совершать линейные колебательные движения с малой амплитудой относительно своего исходного положения. Но силовое воздействие F со стороны инструмента 1 на обрабатываемую поверхность 13 несмотря на позиционные динамические ошибки в процессе перемещения инструмента 1 по заданной траектории остается неизменным, поскольку при малых колебаниях поршня 3 относительно его исходного положения изменение объема сжатого воздуха ΔV в процессе движения манипулятора 14 близко к нулю, т.к. площадь S выбирается малой конструктивно, а линейные колебательные перемещения Δl поршня 3 малы ввиду высокой динамической точности перемещения манипулятора 14. То есть объем ΔV=S·Δl<<V, где V - исходный общий объем сжатого воздуха (внутри первой полости 4, гибкого шланга 6 и источника сжатого воздуха 7). Изменяя величину Р путем закачивания или стравливания воздуха из источника сжатого воздуха 7, снабженного средством изменения давления 8, например насосом, с учетом выражения F=S·Р-S1Р1 можно менять силу воздействия инструмента 1 на обрабатываемую поверхность 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1569222A1 |
| Устройство для разрушения горных пород | 1982 |
|
SU1078067A1 |
| Пневмоимпульсное устройство для очистки полости изделия | 1990 |
|
SU1775194A1 |
| ПНЕВМАТИЧЕСКИЙ ПЕРФОРАТОР | 2004 |
|
RU2345882C2 |
| ПНЕВМАТИЧЕСКИЙ РУЧНОЙ УДАРНЫЙ ИНСТРУМЕНТ ДЛЯ ГРАВЕРНЫХ РАБОТ | 2016 |
|
RU2632307C1 |
| Устройство для испытания изделий на усталость | 1989 |
|
SU1714435A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ ТРУБ | 1997 |
|
RU2114714C1 |
| ПОРШНЕВОЙ КОМПРЕССОР ИЛИ НАСОС И СИСТЕМА ПРИВОДА ПЕРЕНОСНОГО ИНСТРУМЕНТА, ВКЛЮЧАЮЩАЯ ПОРШНЕВОЙ КОМПРЕССОР | 2007 |
|
RU2451834C2 |
| РЕГУЛЯТОРЫ И СИСТЕМЫ ПОДАЧИ | 2010 |
|
RU2531106C2 |
Изобретение относится к области машиностроения и может быть использовано при позиционировании инструмента в процессе очистки и обработки поверхностей, в частности, для удаления оксидных пленок и загрязнений со сложных по конфигурации поверхностей, нанесения защитных покрытий, удаления заусениц. Устройство содержит аэростатический нагружатель в виде подключенного к источнику сжатого воздуха цилиндра, в полости которого с возможностью возвратно-поступательного движения размещен поршень, делящий цилиндр на две полости. Первая из них выполнена герметичной с первым сквозным отверстием на торце цилиндра. Посредством гибкого шланга она связана с полостью источника сжатого воздуха, имеющего средство изменения давления в виде насоса. Вторая полость цилиндра сообщена с атмосферой через второе сквозное отверстие на втором торце цилиндра. Через третье сквозное отверстие второго торца пропущен шток, один конец которого скреплен с поршнем, а второй - с инструментом. В результате упрощается конструкция устройства и повышается точность обработки при размещении инструмента и средства стабилизации с одной стороны обрабатываемой поверхности. 2 ил.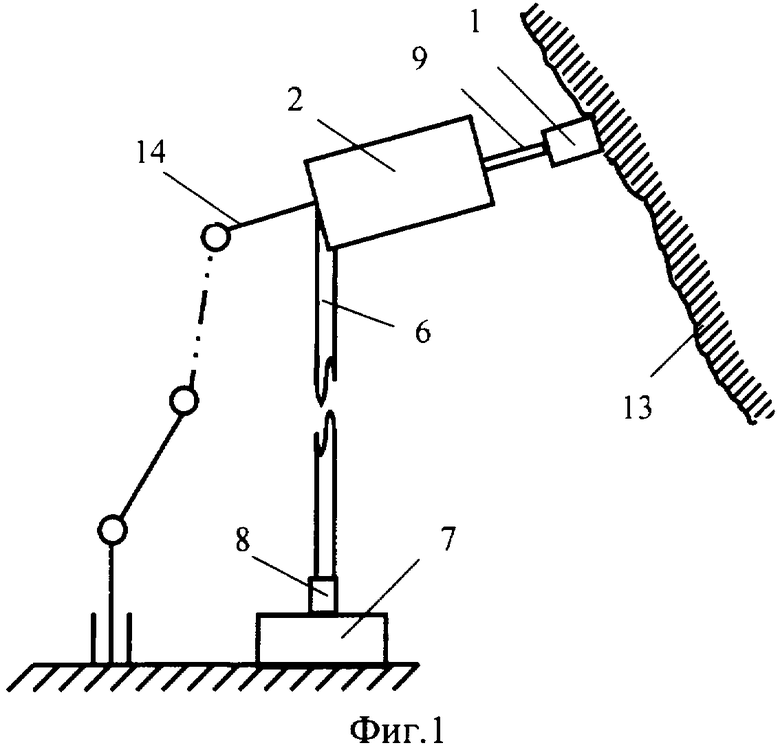
Устройство стабилизации силового воздействия инструмента на обрабатываемую поверхность, содержащее аэростатический нагружатель, выполненный в виде подключенного к источнику сжатого воздуха цилиндра, в полости которого с возможностью возвратно-поступательного движения размещен поршень, отличающееся тем, что цилиндр разделен поршнем на две полости, первая из которых выполнена герметичной с первым сквозным отверстием, предпочтительно размещенным на торце цилиндра, и связана посредством гибкого шланга с полостью источника сжатого воздуха, снабженного средством изменения давления, например насосом, при этом вторая полость цилиндра сообщена с атмосферой через второе сквозное отверстие, предпочтительно размещенное на втором торце цилиндра, выполненном с третьим сквозным отверстием, через которое пропущен шток, один конец которого скреплен с поршнем, а второй - с инструментом.
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОГО ШЛИФОВАНИЯ | 2000 |
|
RU2185271C1 |
| SU 228545 A, 04.08.1969 | |||
| US 4186526 A, 05.02.1980 | |||
| US 3798843 A, 26.03.1974. | |||

