Фиг 2
Изобретение относится к робототехнике и может быть применено при использовании промышленных роботов для выполнения операций сборки, фрезерования, шлифования, зачистки, но преиму дественно в гибком автоматизированном производстве на обрабатывающих операциях.
Целью изобретения является повышение производительности за счет увеличения ко личества инструментов в магазине и сокращения времени на их установку и настройку при одновременном улучшении динамических характеристик манипулятора путем уменьшения инерционюсти последнего звена его руки.
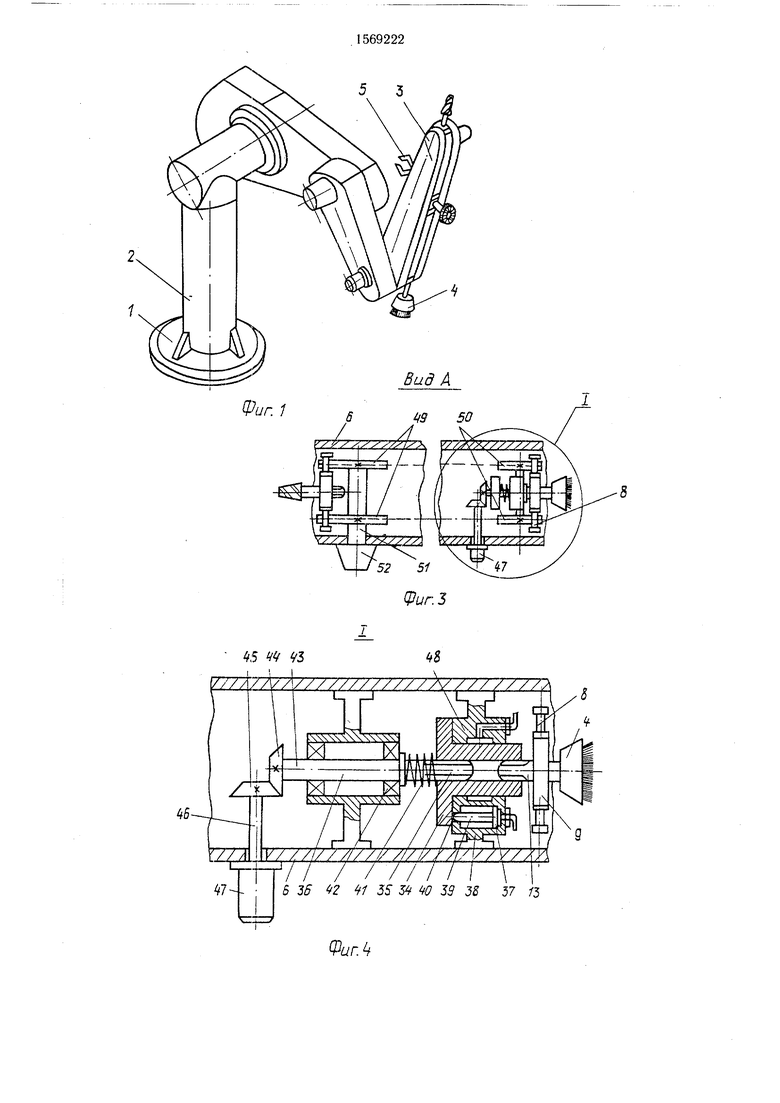
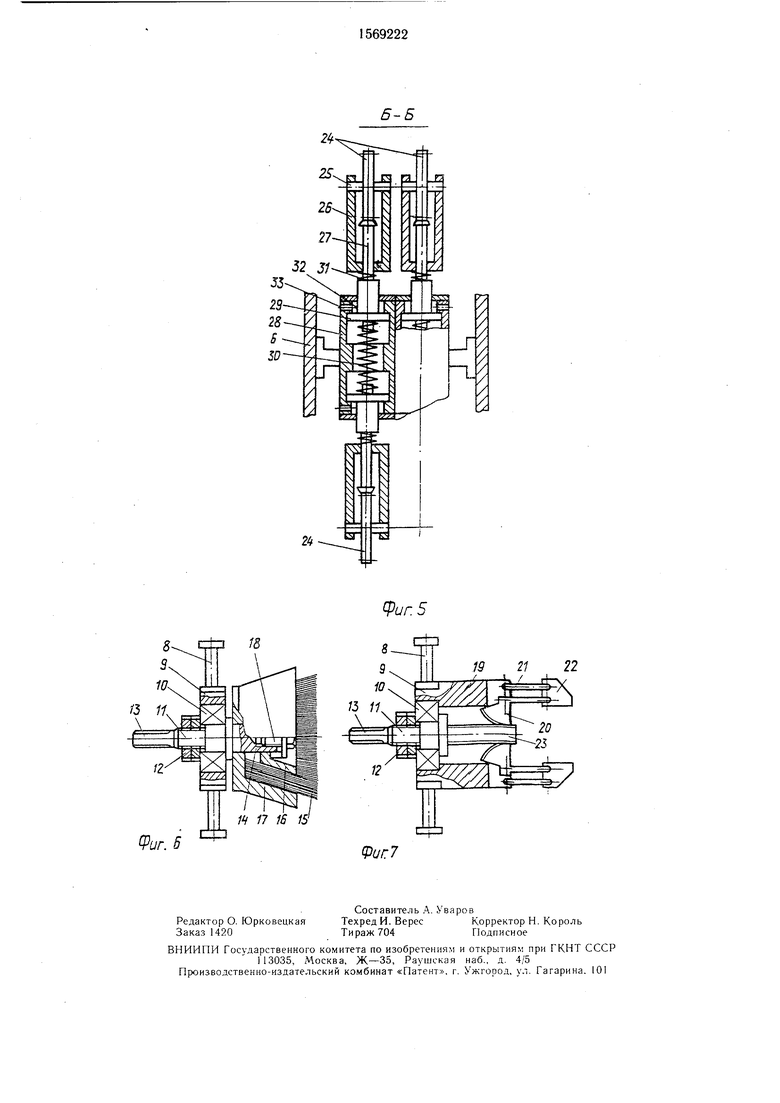
На фиг 1 изображен манипулятор, общий вид; на фиг 2 - кинематическая схема цепного механизма, вид сбоку; на фиг. 3 - вид А на фиг 2; кг фиг. 4 - зел I на фиг. 3; на фиг 5 - разрез Б--Б на фиг. ; на фиг. 6 - торцовая ипофреза, осяций вид с разрезом; па фит 7 - схват, об щий вид с разрезом.
Манипулятор содержит основание 1 с размещенной на нем поворотной колонной 2, на которой смонтирована многозвенная река, последнее звено 3 которой снабжено магазином инструментов (например, иглофреза 4, схват о и др), выполнснны в виде сдвоенного цепного механизма, состоящего из дьу параллельно размещенных з корпусе 6 звена 3 бесконечных цепей 7. элементы 3 которых связаны между собой дополните,:ьно в ге- денными параллельнымиперемычками
(пластинами) 9 с укрепленными ч них с возможностью вращения, например, за счет подшипников 10 инструменттми 4 и 5 Размещенный в подшипниках 1C вал 11 инструментов 4 и о крепится в гем гайками 12 и с одного конца 13 выполнен шлицевим Другой конец 14 вала 11 ..ыполняется в зависимости от назначения инструмента Инструмент может быть съемным, например иглофреза 4, или выполненным за одно целое с перемычкой 9, например схват 5 Иг/о- фреза 4 содержит ворс 15 закрепленный межд внутренней 16 и наружной 17 коническими втулками, стянутыми посредством болта 18 Схват 5 содержит смонтированные шарнирно на стойках 19 (в пшном случае выполненных за oi.no целое с перемычками 9) червячный сектор 20 и глгу 21. тар нирно связанные со сменной губкой 22. Сектор 20 входит в зацепление с концом 14 вала 11, выполненным в виде червяка 23
Каждая цепь 7 снабжена устройством натяжения и фиксации, выполненным в виде находящихся в зацеплении с прогчвополож- ными ветвями цепи 7 звезючек 24, смонтированных с возможностью вращения на осях 25 в П-образных кронштейнах 26, с- тановленных с возможностью осеього пере мещения на соосных штоках 27 силового цилиндра 28 двустороннего действия, поршни 29 которого подпружинены поужиной 30 в
0
Б
0
0
0
5
поршневой части, штоки 27 при этом контактируют со звездочками 24, а кронштейны 26 подпружинены относительно штоков 27 пружинами 31. Штоковые полости 32 связаны со средством подачи рабочей среды (не показано) черех отверстия 33.
Манипулятор снабжен механизмом передачи вращения на инструмент, выполненным в виде втулки 34, установленной с возможностью осевого перемещения на шлицевом конце 35 вала 36 и одновременно на шлицевом конце 13 вала 1 инструмента, расположенным во втулке 34 на глубине, не превышающей величины рабочего хода поршня 37 силового цилиндра 38, шток 39 которого параллелен валу 36 и контактирует с торцом 40 втулки 34 со стороны инструмента, при этом втулка 34 подпружинена пружинок 41 относительно вапа 36. Последний установлен в подшипниках 42, укос-пленных в корпусе 6 звена 3. Конец 43 36 снабжен коническим зубчатым колесом 44, входя щи vi в зацепление с коническим зубчатым колесом 45. установ- ченным на валу 46 привода 47 Втулка 34 алс.чтировача с возможностью вращения в аэростатических направляющих опорах 48, связанных с коочусом 6 звена 3. Средстве подачи рабочей среды (не показано) в аэростатические опоры 48 может быть тюбмм из известных стандартных устройств
Цепи 7 установлены на звездочках 49 и 50 Звездочки 49 смонтированы на валу 51 привода 52 перемещения цели 7
Манипулятор работает следующим образом
В магазин устанавливается необходимый комплект инструментов Для установки необходимого инструмента подается рабочая (реда, например воздух, в поршневую полость сигового цилиндра 38. Поршень 37, перемещаясь пол действием рабочей среды. штоком 39 сдвигает втхлку 34, сжимая пружину 41 и освобождая шлицевой конец 13 вала 1 1 Поступающая в штоковые полости 32 рабочая среда сдвигает поршни 29 к центру силовых цилиндров 28, сжимая пружины 30 и смещая штоки 27 Постедние выходят из контакта со звездочками 24, расфиксируя их и уменьшая сжатие пружины 3 до обеспечения заданного рабочего натяжения цепи 7 Включается привод 52 перемещения цепи 7, приводящий во вращение звездочки 49 и цепи 7 и выполняющий перевод необходимого инструмента в рабочую позицию (под рабочей позицией понимается место установки инструмента j m фиксирования втулкой 34) Точность перевода необходимого инструмента в рабочую позицию осуществляется либо определенным числом оборотов вала -привода перемещения цепи, либо датчиком (не показан), смонтированным в рабочей позиции (определяющим как положение, так и ход
инструмента). Отключение давления рабочей среды в поршневой полости силового цилиндра 38 приводит к сдвигу втулки 34 под действием пружины 41 и постепенному ее надеванию на шлицевой конец 13 вала 11 инструмента. Наличие шлицев в отверстии втулки 34 и на конце 13 вала 11 обеспечивает центрирование вала 11 и втулки 34 и последующую передачу крутящего момента с привода 47 вращения инструмента. Отключение давления рабочей среды в штоко- вых полостях 32 силового цилиндра. 28 приводит к смещению поршней 29 под действием пружин 30 и сжатию пружин 31. В результате повышается натяжение цепей 7 и одновременно фиксируются звездочки 24 вступающими с ними в контакт штоками 27. Включается привод 47 вращения инструмента, передающий вращение по кинематической цепочке: вал 46, зубчатые колеса 45 и 44, вал 36, втулка 34, вал 11 инструмента. Перемещая вращающийся инструмент по пространственной траектории посредством изменения положений, составляющих руку звеньев, манипулятор осуществляет заданную операцию. Смена инструмента после выключения привода 47 осуществляется в описанной последовательности.
Все команды на включения приводов, систем подачи рабочей среды, датчиков и логика их реализации выполняются системой управления робота, например пози- ционно-контурной «СФЕРА-36.
Повышение производительности дости- гается за счет выполнения магазина в виде вытянутого вдоль звена цепного механизма и снабжения последнего рядом устройств, реализующих автоматическую смену, позиционирование, фиксацию и функционирование инструментов различного функционального назначения в широком диапазоне реализуемых операций чго также гарантирует существенное сокращение вспомогательного времени и времени технического обслуживания РТК. Повышение универсальности обеспечивается расширением технологических возможностей, автоматизацией вспомогательных операций смены, позиционирования, фиксации и др., организацией выполнения разнообразных степеней свободы инструмента и реализуемых ими функций на основе одного привода вращения при повышенной инструментальной емкости магазина, компактности и эффективности технического решения последнего, а также за счет улуч0
шения технологичности конструкции манипулятора.
Формула изобретения
Манипулятор, содержащий основание п размещенную на нем поворотную колонну, на которой установлена многозвенная рука, последнее звено которой оснащено магазином инструментов и двумя механизмами передачи вращения на инструмент и перемещения магазина с инструментами, а также следящие приводы звеньев руки и систему управления, отличающийся тем. что, с цс 1ью лооышения производительности за счет /ЕС- лкчския количества инструментов в магази
не и сокращения времени на их установку и настройку при одновременном улуч- ше :чч динамических характеристик манниу лятог- З за счет уменьшения инерцпок::оетн последнего звена его руки, он снабжен уег- о о и с зо фиксации магазина, а магази:.
0 инструментов выполнен в виде сдвоенного цепного -механизма, цепи которого расположено параллельно, установлены с возможностью н перемещения вдоль последнего ЗЕОНЕ , кинематически связаны с мс5 перемещения магазина :; жестко свя- оны ежду собой дополнительно вве- дег:ч ; ,-,; параллельными пластинами, в которые п,г. НИР/НО уста нов. 1г.1 л; инструменты, npt, ,тс . ст; ОЙство фнксашг; магазг.на вы.,ол;:ек л виде дв;,:: аналегичкнх меха0 H;i;.B, ..зччым :-:3 л1Г. дк; кронитеина две звездочки, лл которых in ip hup ч о с гнлана с ..,о ю . со-у етствующл-ч клоншт;1.но.;, а с -;pyrv ,; к- гГмат плески связана соответствхчощой .о цели сдвоенного цегыого меха -:нзма. г также силовой ци т, нл,р двухстороннего дечстЕиЯ, жестко установленный на последнем ззене руки, плскн которого под- ,неьы др. г относительно друга, ккне- иатччески с сое гвсгсгз /юи .м ; звездочкам:- и упруго еея- -,.-1ы г соотг,е,- ствующими кронштейнами, причем механизм передачи вращения на инструмент выполнен в вкде силового цн 1.цдра. жестка связанного с поспедним звеном , вращения инструмента, имеющего шлицевой
5 выходной вал, и ВТУЛКИ с внутренним шлицс- отверстием, которая ыарнирно связана с последним звеном руки, установлена подвижно в осевом направлении на шлицевом выходном валу и подпружинена относительно него, а шток силового цилиндра кинема
0 тически связан с этой ВТУЛКОЙ.
0
Фиг.З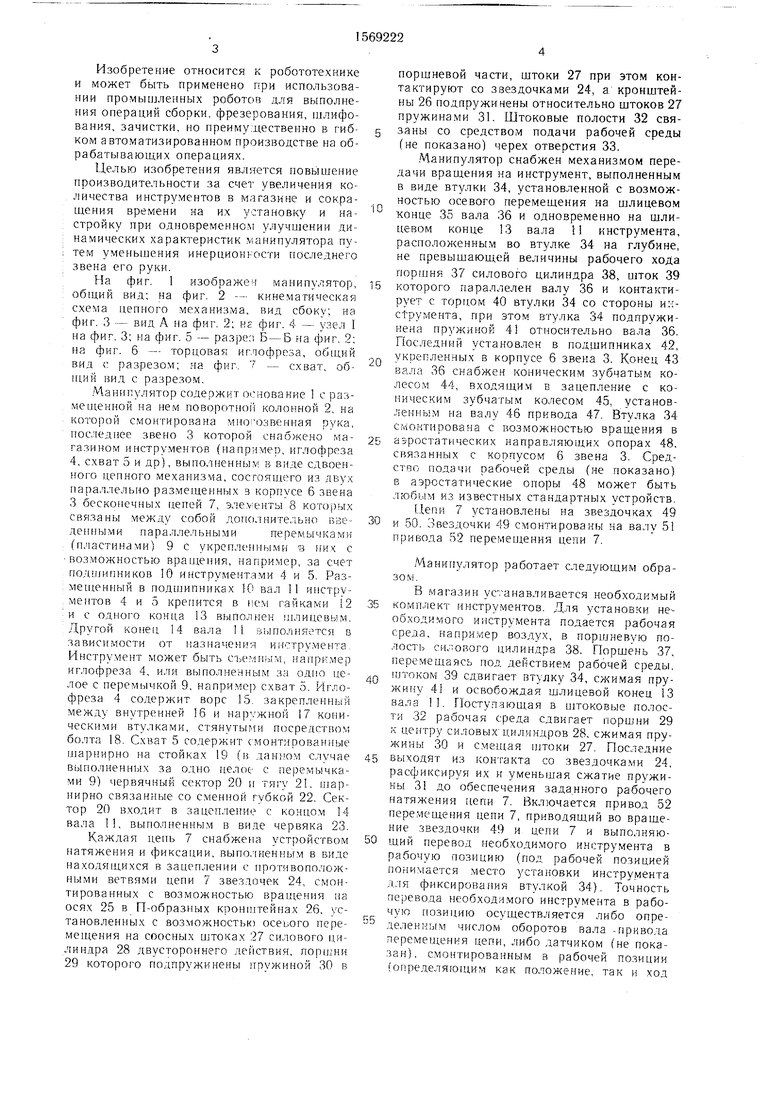
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1321581A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Инструментальный магазин | 1986 |
|
SU1351737A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
Изобретение относится к робототехнике и может быть использовано при использовании промышленных роботов для выполнения операций сборки, фрезерования, шлифования, зачистки преимущественно в гибком автоматизированном производстве на обрабатывающих операциях. Цель изобретения - повышение производительности за счет увеличения количества инструментов в магазине и сокращения времени на их установку и настройку при одновременном улучшении динамических характеристик манипулятора путем уменьшения инерционности последнего звена его руки. Между двумя параллельными цепями 7 расположены дополнительные перемычки, в которых шарнирно размещены инструменты 4, 5. При вращении инструмента 5 в рабочей позиции от привода вращения через зубчатые колеса 45 силовые цилиндры 28 за счет внутренних упругих элементов воздействуют на кронштейны 26 со звездочками 24 и натягивают цепи 7. Штоки цилиндров 28 стопорят звездочки 24 и повышают жесткость последнего звена руки, на котором установлены эти цепи 7. При смене инструментов 4,5 силовые цилиндры 28 через кронштейны 26 и звездочки 24 обеспечивают свободное вращение цепей 7 вместе с инструментами 4,5. Фиксация инструмента и передача на него крутящего момента в рабочем положении обеспечивает механизм передачи вращения. 7 ил.
45 ЧЧ ЧЪ
454777/ /// // /
5 Jf / J5 54 40 J5 J5 37 /3
Фиг 4
Фиг. 5
Фиг. 5
Фиг 7
| Промышленный робот | 1983 |
|
SU1142270A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
