1. Область техники, к которой относится изобретение.
Изобретение относится к морскому транспорту, военному, спасательному и рыболовецкому флотам, спортивному судостроению. Судно может осуществлять автономный долговременный мониторинг заданных морских акваторий, постоянно присутствуя в них, выполнять непрерывную охрану морских государственных границ.
Оно обеспечивает энергосбережение на флоте, охрану природы, животного и растительного мира, экологию морей и океанов, т.к. не требует топливных ресурсов, не загрязняет воздушную и водную среды, не создает шума. Указанный эффект достигается за счет того, что необходимую энергию для движения оно получает преобразованием собственной качки в силу тяги. Соответственно, чем мощнее волнение и возникающая от него качка судна, тем сильнее тяга и быстрее его ход. Логично назвать такое судно качеходами. Задача состоит в создании конструкций судна, обеспечивающих усиление его качки, а не ее умерения.
Можно предположить, что суда-качеходы откроют эру машущих крыловых движителей, которые органически вписываются в технологию использования естественного качеволнового движения судна, сообщающего его энергию этим движителям напрямую или через преобразователи. Органически продолжая качательные движения корпуса судна или упругосвязанных между собой корпусных секций, крыловой движитель многократно превышает винтовых собратьев по тяге, что особенно необходимо в буксирном флоте, равно как в военном и рыболовецком флотах, где их полезность дополнена еще и бесшумностью.
2. Уровень техники.
Все предыдущее столетие изобретатели пытались найти эффективное решение проблемы использования энергии морских волн для движения судов и кораблей. Наиболее распространенное из них - применение ластообразных и крыловых конструкций в воде для создания тяги, оказавшихся, однако, не эффективными, как и многие другие конструкции. Потерпев фиаско, специалисты и ассоциированные ведомства погасили свой интерес к ней, объявив идею бесперспективной.
Главная причина неудач состояла в традиционности конструкторских решений, которые мало выходили за рамки, выработанные веками судостроительной практикой и всегда казавшиеся естественными и незыблемыми.
Во-первых, это отсутствие конструктивных предложений, заставляющих качаемое волнами судно не просто держать, а размахивать под водой ластами и крыльями. Оно проявляется в:
- непосредственной установки пассивных тяговых крыльев (крыльев) на корпус [1];
- отсутствии каких-либо средств ускорения движения крыльев относительно воды [2-6].
Впервые этот недостаток использования крыльев как движителей был описан и устранен в [7], где необходимое увеличение скорости движения крыльев достигнуто выдвижением их достаточно далеко от оконечностей судна вдоль киля. Для этого к килю прикреплены прочные легкие стрелы, продлевающие его в разные стороны и удерживающие на своих концах тяговые крылья.
Вторая причина - это сохранение жесткой связи между корпусом судна и его массой, которая гасит энергию волны в процессе ее передачи на качеприводной движитель и, соответственно, на тяговые крылья. Действительно, массы конструкций, оборудования, груза и корпуса судна суммируются своей инерцией на его наружной обшивке и при соударении с волной глушат ее энергию в форме инерционного сопротивления. Наполняющая судно масса (инерция) ограничивает его качку, не принимая а, скорее, "разбивая" энергию волн, механически направленную на его корпус. Для исключения эффекта аннигиляции воспринимаемой корпусом энергии волны масса судна здесь отделена от оконечных частей (секций) корпуса, предоставив им свободу для послушной килевой безинерционной качки, совершаемой в диаметральной плоскости (ДП).
Это сделано путем сбора и связывания масс элементов судна неким "сборником" и оформлением его в виде тяжелой средней (центральной) секции, которая упруго "подвешивается" с помощью шарниров и пружин между двумя легкими оконечными секциями составного корпуса судна. После этого ничто уже не мешает им послушно следовать движениям волны и полноценно передавать их энергию на тяговые крылья. До этого конструктивного решения значительная, скорее подавляющая часть энергии волны тратилась на бессмысленную знакопеременную болтанку массы судна, жестко связанной с ударяющимся о волну корпусом.
Отметим, что вопрос отделения массивной (тяжелой) составляющей части судна в форме центральной секции имеет принципиальное значение, т.к. одинаково плотно загруженные секции некоего секционного судна не могут быть лучшим проводником волновой энергии, сообщающим ее качеприводному движителю. Последнее отличает конструкцию движимого за счет энергии волн 2-секционного судна, разработанного и зарегистрированного в US Patent Office 20 мая 1919 г. американцем B.F.Jackson [8].
Также, в отличие от предлагаемого здесь решения конструкция судна американца содержит единственный шарнир, соединяющий секции судна по их верхней кромке, отчего книзу судна обращен секторный проем, грубо нарушающий обтекаемость "ломающегося" по шарниру корпуса. Кроме того, качеприводной движитель его судна расположен перпендикулярно движению и вместо крыльев использует гребенчатую конструкцию, составленную из поворотных створок.
В рамках рассматриваемой здесь единой концепции качеходов секционного типа излагаемое решение может иметь дело как с 3-секционным качеходом, так и с 2-секционным. В этом случае центральная тяжелая секция освобождается от необходимости иметь водонепроницаемый корпус за счет того, что она подвешивается также с помощью шарниров и пружин между оконечными секциями, но уже внутри них.
Выбор ранга секционности качехода для проектирования, строительства и эксплуатации качехода зависит от поставленных перед ним задач, сформулированных из тактико-технических и/или технико-экономических требований, а также имеющихся в распоряжении судостроителя технологических возможностей.
Предложенные здесь решения отличаются от качеходов гироскопического [9] и глубинного [10], применяющих, соответственно, килевую и вертикальную качки, полнотой использования обеих видов качки.
3. Раскрытие изобретения.
3.1. Трехсекционная архитектура.
3.1.1. Общая характеристика.
В отличие от 2-секционной конструкции качехода, в которой сборник масс упруго подвешен внутри пары шарнирно, но герметично соединенных секций, 3-секционная конструкция (Фиг.1) хотя и содержит сборник масс, но он выполнен в виде центральной секции (ЦС) 17, погруженной в воду с дефицитом водоизмещения G. Т.е. ее вес, не уравновешенный собственной плавучестью, сохраняется на уровне G. Поскольку ЦС 17 шарнирно подвешена на двух оконечных безынерционных (предельно легких) секциях, то этот вес поровну компенсируются силами плавучести В этих вдавленных в воду секций. Для того чтобы оконечные секции, каждая, не были опрокинуты вертикально на шарнирах 14 действием образующихся силовых моментов B·L, где L - плечо опрокидывающей пары сил (Фиг.1), их действие компенсировано противодействием пружин 18, создающих, соответственно, при непременном своем растяжении противоположные спрямляющие силовые моменты, выпрямляющие и равномерно заглубляющие оконечные секции.
3.1.2. Реализация 3-секционного качехода.
Представленный секционный качеход (Фиг.1) состоит из трех секций, из которых ЦС 17 является сборником масс. Она несет вес основных технических средств судна и грузовой отсек. ЦС оканчивается цилиндрическими сегментам 11 (полубочками), "лежащими" поперек ДП. Их длина вместе с шириной пары боковых дисковых щек 8 оконечной секции укладывается в размер ширины судна. Торцы каждой бочки заканчиваются осевыми цапфами шарнира 14, на которые своими подшипниками насажены щеки 8 оконечной секции 2, удерживаемой ими шарнирно в контакте с ЦС. Ясно, что речь идет об обеих оконечных секциях.
Каждая оконечная секция 2 своим вогнутым цилиндрическим торцом 24, во-первых, герметизируется, а, во-вторых, почти вплотную огибает торцевую бочку 11 центральной секции 17. Нижняя днищевая часть полуцилиндра 24 секции отделена от нее карманом 93 для крепления троса 12 и служит барабаном для попеременной намотки/размотки троса 12, что происходит под действием волны и пружины 18 за счет упругокачательных движений самой оконечной секции 2 на шарнирах 14 под действием волны. В данном варианте реализации 3-секционного качехода оконечные секции удерживаются в горизонтальном положении каждая своей пружиной 18, схваченной крюком 13 внутри пенала 16, установленного под днищем центральной секции качехода.
3.1.3. Качеприводные выносной и выдвижной крыловые движители.
Освободив в процессе качки массу судна от жесткого противоборства с волной, ранее расходовавшей свою энергию на знакопопеременные ускорения массы судна, сохраняют энергию волны для преобразования в потребительскую форму специальными средствами. В первую очередь таковым является качеприводной крыловой движитель. ЦС, максимально собирающая массу судна, водоизмещает намного меньше, чем весит. Избыток веса ЦС G (Фиг.1), не уравновешенный ее состоявшимся водоизмещением, удерживается все же в этом положении за счет укладки ЦС на оконечные секции 2 как на опоры моста. При этом ЦС с помощью пружин 18 вдавливает эти секции в воду настолько, что выбирает с их помощью недостаток собственного водоизмещения одинаковыми порциями В, установив G=2 В.
Степень натяжения пружин 18 канатом 12 подбирается такой, чтобы и секциями 2 они на спокойной воде оставались бы в горизонтальном положении. Регулировка происходит либо с помощью регуляторов натяжения пружин (как на Фиг.11), либо балластом, принимаемым дополнительно ЦС, если полезный груз 15 не достаточно тяжел.
Оконечные секции 2, не обладая своей инерцией, послушно следуют движениям волны, натягивая или опуская пружины 18. Достаточная эластичность пружин обеспечивает минимальное "беспокойство" ЦС 17 и, следовательно, минимизирует инерционные потери волновой энергии, принимаемой оконечными секциями. Для создания тяги используем теперь их безынерционные качательные движения. С этой целью в продолжение киля каждой оконечной секции на жесткой легкой стреле укрепляем крыло, создав качеприводной выносной крыловой движитель подобно тому, как это сделано на катере (Фиг.34, 35), или качеприводной телескопический движитель гибридного качехода (Фиг.9).
3.1.4. Качеприводной рычажный крыловой движитель.
Однако здесь (Фиг.1, 3) для повышения эффективности крыла разработан и применен рычажный движитель, обеспечивающий увеличение амплитуды угловых маховых движений крыла 23, которая в квадратичной зависимости определяет силу его тяги. В результате оказывается возможным коренным образом сократить вылет стрелы 21, несущей крыло 23, что при той же эффективности существенно улучшает габаритные характеристики судна без применения телескопической конструкции несущей стрелы 21 по примеру (Фиг.9).
Стрела-рычаг 21 основанием закреплена в шарнирной опоре 20, оканчивающей консоль 19, укрепленную на киле ЦС 17 винтами 25 (Фиг.3). При раскачивании оконечной секции 2 ее движения передаются стреле 21 тягой 5 и шарнирами 7. Здесь тяга выполнена как гидроцилиндр, который при закрытых гидроканалах работает как простой шток, а при открытых способен заряжать аккумуляторы гидросистемы, что обычно происходит во время снижения хода или стоянок судна.
Обозначим угловые размахи оконечной секции 2 через а, а несущей рычажной стрелы - через ε, также примем обозначения размеров плеч рычажного механизма согласно Фиг.1. Тогда получим выражение для оценки степени возрастания углового размаха несущей стрелы в виде: µ=Sin(ε)/Sin(α)=у/х, где расстояния по горизонтали от тяги 5: х - до опоры 20 и y - до опоры 14. Тогда полный линейный размер взмаха крыла составит 2µ(x+z).
Повышение размашистости несущей стрелы ставит две проблемы. Первая из них - это коллизия движений стрелы и корпуса секции 2. Решается формированием в нем щели 4, в которой несущая стрела 21 может беспрепятственно совершать свои махи. Вторая проблема состоит в неприемлемости использования несущей стрелы в качестве угловой опоры для пружины, обеспечивающей упругие колебательные угловые отклонения крыла 23, возникающие во время размахивания стрелы при формировании силы тяги. Причина - возросшая величина угловых отклонений самой стрелы от горизонтали. Только нулевое или близкое к нулевому угловое смещение опоры от среднего положения крыла делает ее идеальной опорой для такой пружины. Из-за небольших угловых колебаний стрелы этому требованию удовлетворяют выносной (Фиг.34) или выдвижной движитель (Фиг.9).
Для правильной работы качеприводного рычажного движителя по формированию тяги (Фиг.1) требуется, чтобы указанные колебания крыла происходили относительно горизонтальной плоскости или стабилизированного горизонтального вала (стабвала) с твердым угловым положением в пространстве, сохраняемым во время всего маха стрелы. Простейшее решение, удовлетворяющее этому требованию, - это вал или/и блок, копирующие угловое положение ЦС 17.
Устройство и элементы механизма сохранения угловой стабилизации вала для удержания пружины угловых колебаний тягового крыла вокруг него показаны на Фиг.3, 4, 5, 6. На виде снизу (Фиг.3) показана консоль 19, установленная на ЦС 17 и имеющая фиксированный на ней блок 28, сохраняющий требуемое почти статическое угловое положение. Благодаря канату 27, закрепленному на неподвижном блоке 28, его положение копируется на блок 34 в удаленном конце стрелы 21 (Фиг.4), где канат также закреплен намертво, что исключает любые его проскальзывания.
Фиксированный (Фиг.5) в этом блоке (34) шпонкой 36 стабвал 32 удовлетворяет сформулированному выше требованию удерживать свое угловое положение в пространстве неподвижно. В свою очередь его торцевая щель также удерживает в пространстве неподвижно перекладину раздвоенной П-образной пластинчатой пружины кручения 33. На стабвалу 32 насажена полая стойка 22, несущая спаренные скобой 3 крылья 23 биплана и упругоудерживаемая от кручений на нем пружиной 33, раздвоенные концы которой вставлены для этого в прорези стойки 22. Пара пружин 33 с двух сторон упруго держит стойку 22 и, соответственно, расположенные на ней крылья 23 биплана преимущественно горизонтально, удерживая биплан от свободных кручений на валу 32.
Плоскости биплана 23 объединены в единую конструкцию направляющей скобой 3 (Фиг.1, 3, 4, 5), которая вместе с ними может быть сдвинута вдоль стойки 22 в пазах, куда скоба 3 входит. Это дает возможность менять эксцентриситет биплана Е, приспосабливая его под предстоящие условия плавания, и даже реверсировать ход судна сдвигом скоб 3, сопровождающимся сменой знака эксцентриситетов переднего и заднего бипланов.
На Фиг.4 и 6 на кромках несущей стрелы 21 показаны направляющие ролики 31, способствующие плавному вхождению стабилизирующего каната 27 в сквозные внутренние каналы стрелы, в которых обе ветви каната могут встречно перемещаться во время махов стрелы, обеспечивая стабилизацию опорного вала 32.
3.1.5. Управление качеходом.
Качеход по указанной версии (Фиг.1, 2) управляется рулевыми устройствами типа бортовых водометов 29, приводимых двигателями 30. Ясно, что их эффективность не является достаточной для судна, поворотливость которого уменьшилась с установкой рычажного крылового движителя. Поэтому в разделе 3.4.1 он усовершенствован и дополнительно выполняет функцию руля.
3.2. Устройство торможения и останова безынерционной качки.
Устройство 9 (Фиг.1, 2 и 7, 8) является тормозом безынерционной качки и позволяет прекратить прием волновой энергии качеходом, что может оказаться весьма уместным в условиях разбушевавшейся стихии и/или стесненных условиях плавания, когда скорость качехода может превысить все разумные пределы и стать опасной.
Тормоз 9 - дистанционно управляемое устройство, удерживаемое нейтрально конической шестерней 37 (Фиг.7), знакопеременно вращающейся под действием качки в зубчатом зазоре между торцевыми кромками бочки 11 ЦС 17 и щеки 8 оконечной секции 2. Удержание происходит валом 39, свободно расположенным в центральном отверстии шестерни 37. Вал 39, в свою очередь, удерживает нейтрально две тормозные колодки: наружную 40, несущую мотор-редуктор 9 тормоза, и внутреннюю 38, через которые он проходит, и которые скользят по направляющим, проточенным на обеих названных кромках.
Колодки 40 и 38 (она же гайка) начинают действовать, когда они стягиваются винтовой нарезкой вала 39, приводимого во вращение мотор-редуктором 9. В этом случае колодка 38 начинает касаться обоих контуров внутренних направляющих 42 (Фиг.8), проточенных на взаимодействующих кромках бочки 11 и щеки 8. Контуры обеих направляющих одинаковы, симметричны и представляют собой две сворачивающиеся внутрь пологие симметричные спирали, начинающиеся из самой верхней точки. Если нижняя колодка 38 находится в этой точке, то угловые колебания секций относительно друг друга вокруг оси ОО уже невозможны. Если еще существует зазор z, то возможны незначительные повороты в любую из сторон, пока колодка 38 не коснется сразу обеих соседних спиралей. Чем больше зазор z, тем больше допустимая амплитуда относительных качаний секций.
3.3. Качеход с комбинированным движительным комплексом.
3.3.1. Описание отличительных проектных решений.
Ясно, что штиль на море - совсем не редкая ситуация. Поэтому в ряде случаев может оказаться выгодным иметь обычную резервную винтовую пропульсивную установку, способную обеспечить движение в штиль или помощь качеприводной пропульсивной системе при умеренном волнении. Такой качеход изображен на Фиг.9 и 10.
Кроме указанного дополнения качеход имеет измененную конструкцию шарнирных узлов. Здесь бочки 11 принадлежат оконечным секциям, а не центральной. Это сделано для того, чтобы внутри оконечных секций можно было бы поместить какое-либо оборудование без придания этим секциям существенной инерционности. Установка такого оборудования в бочках оконечных секций позволяет практически сохранить безинерционность их качки, т.к. в любом случае сила его веса проходит через шарнир 14, т.е. через ось упругих качаний ОО, и поэтому практически не участвует в килевой качке оконечных секций.
3.3.2. Устройство регулирования упругости колебаний оконечных секций.
Ясно, что добавлять балласт в центральную секцию - не лучший способ выравнивания оконечных секций качехода. Гораздо удобнее добавлять или уменьшать количество пружин, задействованных для развития требуемого усилия, развиваемого ими при выровненном горизонтальном положении оконечных секций, либо также изменять натяжение самих пружин 18. Здесь применены оба метода сразу, как видно из Фиг.11. Последняя фигура является изображением днищевого разреза ВВ (Фиг.9).
Для удержания носовой оконечной секции горизонтально с помощью канатов 12, наматываемых на барабаны 11, используются пружины, пронумерованные нечетными числами, в то время как кормовую оконечную секцию в горизонтальном положении должны удерживать четно пронумерованные пружины. При неполной нагрузке только некоторые пружины могут работать, например, только 3 и 5 для носовой секции и 4 - для кормовой секции. Это определяется тем, что только у этих пружин соответствующие поршни 48 втянуты в гидроцилиндры 5, вызывая тем самым натяжение и, соответственно, работу пружин 18. При неполном управляемом втягивании поршней развиваемое пружиной усилие будет слабее, что обеспечивает правильный подбор и идеальное напряжение днищевой батареи пружин.
3.3.3. Телескопический крыловой движитель.
Качеход, имеющий стандартный движительно-рулевой комплекс (Фиг.9), может иметь телескопический выдвижной движитель, состоящий из выдвижной стрелы 21, стойки крыла 22 и, собственно, крыла 23, укрепленного на ней с помощью вала 32, заделанного посредине неподвижно в стойку с помощью специальной неповоротной втулки 46. Плоскость крыла 23 имеет центральную и осевые прорези, вдоль которых свободно уложен вал 32. Этот вал удерживает крыло своими торцами, вделанными в ребра, направляющие поток (они же ребра жесткости). Вал является также пружиной кручения, затрудняющей свободные колебания посаженного на него крыла.
Учитывая, что между осью вала 32 и центром гидродинамического сопротивления крыла D существует эксцентриситет Е порядка 10-40% хорды крыла, оно во время махов стрелы поочередно в ту и другую сторону поворачивается вокруг оси вала 32, следовательно, результирующая силы давления D (перпендикулярная плоскости крыла) будет делать то же самое. Это приводит к появлению проекции результирующей силы гидродинамического давления Dx, направленной в одну и ту же сторону независимо от направления поворота крыла. Эта проекция есть сила тяги. От центра крыла она всегда направлена в сторону оси вала, вокруг которого происходят вынужденные колебания крыла.
3.4. Полное управление качеходом.
3.4.1. Маневровый крыловой движитель.
Выше были описаны с крыловые движители повышенной амплитуды взмахов тягового крыла, но без рулевой функции. Повышенной амплитудой взмахов крыла считается такая, которая превышает амплитуду килевой качки в любой точке цельнокорпусного судна такой же длины, что и качеход. Рассмотрим теперь устройство маневрового крылового движителя с функцией руля и реверса.
Маневровый движитель (Фиг.13) состоит из стрелы 21, каната 12, закрепленного фиксаторами 35 на условно неподвижном блоке 28 (Фиг.3, 6), являющемся частью консоли 19, исходящей от днищевой части центральной секции 17, и на блоке 34, установленном на оси 32 в конце стрелы 21. Стабилизированной угловой опорой здесь, вслед за блоком 34, является сама стойка 22 (а не ось 32, как ранее), для этого она намертво соединена с блоком 34. При махах стрелы 21 стойка 22 занимает преимущественно вертикальное положение, создавая с помощью фиксатора 58 оптимальную угловую опору для пружины 56. Последняя обеспечивает упругость наклонов крыла 23 вокруг оси 55, для чего оно удерживается люлькой 57, сидящей на оси 55. Люлька также воспринимает роликами 59 в интересах крыла 23 упругость сопротивляющейся пружины 56. В итоге во время махов крыла оно, преодолевая сопротивление воды, становится под разными углами к горизонтали, на которую проецируется результирующая сила указанного сопротивления. Как объяснялось, горизонтальная составляющая результирующей силы превалирующего давления масс воды на плоскость крыла представляет собой силу тяги движителя.
Маневровый движитель способен поменять направление силы тяги, сменив эксцентриситет Е на противоположный, для чего сервопривод 63 должен своими червяками 65 с помощью червячных колес 64 одновременно перекинуть параллельные звенья 60 четырехзвенного механизма (с шарнирами 61 и 62) в другую сторону. Для размещения шарниров 61 и звеньев 60 в крыле 23 может быть образовано "корытце" 66, куда утапливаются указанные звенья. Столь простое реверсирование хода судна, в случае качехода, может полностью исключить из употребления такой маневр как разворот, т.к. такое реверсирование не требует ни времени, ни дополнительного пространства.
Для обеспечения функции рулевого управления элементы движителя, создающие тягу, сконцентрированы в нижней поворотной части стойки 54. Верхняя 22 и нижняя 54 части стойки соединяются баллером 53, повернув который, привод 52 через редуктор может развернуть и баллер, и сидящую на нем всю нижнюю часть стойки 54 вместе с крылом 23. Таким образом, поворот крыла 23 вместе с рулевой колонкой 54 и, следовательно, осью его наклонов 55 на угол φ приводит к повороту силы тяги на тот же угол.
Конструкция рулевой колонки 54 имеет здесь (Фиг.13, 14) один недостаток, а именно ось упругих наклонов крыла 55 смещена от плоскости крыла слишком далеко по высоте h, что ухудшает процесс тягообразования. Поменяв положение оси 55 и пружины 56 (Фиг.15, 16), получаем минимальное отклонение h, которое вообще может быть сведено к нулю.
Процесс смены курса качеходом осуществляется как отдельным, так и совместным поворотом обоих движителей (Фиг.17).
3.5. Конструктивные варианты воплощения и использования качехода.
3.5.1. Качеход с эластичным укрытием межсекционных пространств.
В ряде случаев по тем или иным причинам может оказаться эффективнее конструкция качехода (Фиг.18, 19) с верхним расположением элементов упругости 18, обычным оформлением шарнирных узлов 14, герметическим укрытием межсекционных пространств эластичным материалом 67. Регулирование упругости межсекционных связей может выполняться изменением жесткости пружин, а также закачкой воздуха в эти пространства с автоматической поддержкой необходимого давления.
3.5.2. Способ доставки грузов морем с использованием энергии волн.
3.5.2.1. Надводный объект.
По способу 3-секционного качехода может буксироваться какой-либо объект (судно, баржа, цистерна и т.д.), для чего объект (Фиг. 20, 21) должен занять место центральной секции 17 качехода и быть оборудован шарнирами 14 на консольных опорах 68, 69, а также крюками 59 или сцепами для удержания пружинных канатов 12. Сила упругости пружины 18 регулируется натяжением ее с обратной стороны аналогичным канатом, наматываемым для этого лебедкой 94.
Перед тем как сформировать состав качехода, оконечные (буксирующие) секции будучи пустыми и погруженные в воду по линии ватерлинии WL1 заполняются балластом и затопляются по линию WL, т.е. вровень с буксируемым объектом 17. Затем надежно соединяются с ним в шарнирах и канатных сцепах 59. Далее вода из балластных цистерн оконечных секций откачивается, и по мере откачки с помощью лебедок 94 натягиваются пружины 18, обеспечивая силы упругости, достаточные для удержания оконечных секций в горизонтальном положении. После осушения оконечных секций и совместного всплытия на уровень ватерлинии WL2 состав становится готовым к самостоятельному плаванию как 3-секционный качеход.
В конце плавания, когда центральная буксируемая грузовая секция (судно или плавучий объект) доставлена в место назначения, она отделяется от оконечных секций по изложенной схеме, но в обратном порядке. Оконечные секции теперь свободны для морской транспортировки другого груза. Следует отметить, что оконечные секции как буксиры могут быть использованы и поодиночке (Фиг.21, Фиг.38), для чего весовую нагрузку буксируемого объекта следует сместить в сторону буксирующей секции.
Описанный способ морских перевозок может стать одним из распространенных методов доставки грузов судами смешанного плавания "река-море", а также твердых негабаритных и, возможно, притопляемых грузов.
3.5.2.2. Подводный объект.
Подводный объект - это любой объект, используемый в качестве центральной секции качехода и имеющий на этот период дефицит плавучести, величина которого нагружает оконечные секции как опоры, заставляя их с помощью пружин, находящихся в пеналах 12, держаться горизонтально (Фиг.24-27). Для удержания объекта на поверхности или при поверхности используется рама 73 с шарнирами качания секций 14, гнездом 72 для захвата и узлами 74 для крепления груза 17. На раме имеется надстройка или рубка управления 47.
Для снаряжения сборного качехода в поход груз 17 с помощью своих средств или боковых понтонов должен быть приподнят к поверхности, вставлен и присоединен к гнезду 72. После чего понтоны должны постепенно уменьшить силу поддержания груза, а оконечные секции 2 - увеличить ее усилением действия пружины и своим заглублением под действием переноса силы тяжести груза на них. Отведя понтоны или заполнив балластные цистерны, если речь идет о подлодке, составной качеход готовят к походу.
3.6. Варианты качехода и движительно-рулевых комплексов.
3.6.1. Двухсекционный качеход.
2-секцонный качеход (Фиг.22) - это качеход, у которого обе оконечные секции 2 соединены парным (парносоосным или парнопараллельным) шарниром. При этом цилиндрическое тело (бочка) 17 как сборник масс может находиться в составе любой секции, либо только соединяться с ними парным шарниром 14. Главное состоит в том, что вся весовая (массовая) нагрузка приходится на этот единственный шарнир.
Для возможности двигаться в портах и других стесненных условиях плавания качеход снабжен убирающимся движителем, а также парой поворотных маневровых водометных движителей 72, способных менять величину и направление силы тяги. Чтобы не придать инерционность оконечной секции, каждый движитель находится в непосредственной близи шарнира 14.
3.6.2. Убирающийся маневровый крыловой движитель.
Для плавания в северных широтах, где возможны встречи со льдами, необходимо исключить столкновения движителя с ними. С этой целью в носовой части качехода образована щель 4 и каверна 95, в которых, соответственно, укрываются откидная стрела 21 и привод 52 с червячным механизмом 65, запрокидывающие движитель на палубу оконечной секции 2, в ДП которой в продолжение щели 4 проделан паз 51. Он и принимает стрелу движителя для надежного крепления при появлении вероятности его соударений с льдинами или другими объектами.
На то, что этот движитель рулевой, указывает наличие у стойки 22 продолжения в виде поворотной части 54.
3.6.3. Рычажный движитель с опорным штоком.
3.6.3.1. Геометрическая картина (концепция).
В разделе 3.1.4 был описан рычажный движитель, основание стрелы которого опирается в днищевую консоль, исходящую из ЦС, содержащую основную массу качехода. Для получения максимальной размашистости движителя его следовало бы перенести к штевню оконечной секции, где приводной шток имеет максимальный ход. Однако качательные движения самой оконечной секции 2 в этом случае сразу встречают затруднения от опорной консоли из-за возросшей ее длины.
Чтобы обойти затруднения, создадим (Фиг.28) сверху над оконечной секцией 2 исходящую из центральной секции 17 консольную шарнирную опору 76, пропустив внутри цилиндрического канала 75 оконечной секции опорно-толкающий шток 49. Консоль же 19 создадим в носовой части секции 2 с шарнирной опорой 20 на конце для приложения усилия сгиба стрелы 21. Чем дальше от шарнира качания 14 отстоит опора 76 опорно-толкающего штока 49, и чем короче (в пределах разумного) плечо стрелы между ее основанием и точкой приложения усилия сгиба, тем больше размашистость движителя.
Заметим, что в рабочем состоянии вся короткая часть стрелы находится внутри такого же короткого пенала 44, в котором она может при остановленной качке сдвигаться назад под днище качехода, для чего он оснащен приводом 30. Все управляющие сигналы и электропитание подаются по жилам кабелей 78, доставляемых к механизмам движителя по каналу 77, внутри которого они скользят под действием усилия выдвигающейся стрелы 21, сопровождая ее, либо под действием лебедки 79 во время движения стрелы назад под днище качехода.
3.6.3.2. Тяговое крыло "биплан" с независимо качающимися полуплоскостями.
Вместе с общей конструкцией движителя здесь претерпело изменения также крыло, выполненное в виде биплана двуосным с независимо качающимися полуплоскостями (Фиг.28, 29, 30). Крыло состоит из:
- вертикали 22 (стабилизированной стойки), сохраняющей свое угловое положение на оси 32 практически постоянным так, что рулевой баллер 53 остается вертикальным,
- синхронных рулевых колонок 54 и полуплоскостей 23, парами соосно симметрично расположенных на колонках.
Стабилизированные вертикалью 22 вместе со стойками 54 валы 55 удерживают шарнирно полуплоскости 23, насаженные на них с помощью осевых втулок 46. Эти валы также (Фиг.29) затрудняют колебания полукрыльев с помощью пружин кручения 33, заделанных одним концом в торец вала 55, другим - в торец 80 цилиндрической полости полуплоскости 23, куда они спрятаны.
Свобода качаний каждой отдельной полуплоскости и, следовательно, самонастройка их по характеру местного потока благоприятно влияет на эффективность крыла в целом.
Руление с помощью крыла осуществляется синхронизированным скобой 3 поворотом колонок 54 на соосных баллерах 53, удерживаемых вертикалью 22 с помощью заделок 50. В результате укрепленные во втулках 89 валы 55 разворачиваются вместе с сидящими на них 4-мя полуплоскостями 23, что и вызывает соответствующий разворот тяги крыла.
3.6.3.3. Механизмы управления тягово-маневровым крылом.
Конструкция маневрового движителя исключает свободную механическую передачу управляющих воздействий на биплан, поэтому необходимые функции управления им производятся электромеханически через герметизированные кабели 78, 88, 90-92 и их соединения, а также оборудование и приборы. Вертикаль 22 поддерживается в неподвижном угловом положении благодаря измерениям клинометра 86 (Фиг.30, 31). Любое отклонение чувствительного элемента от нуля (φ>0) по кабелю 90 вызывает реакцию бортовой ЭВМ и подачу через кабель 91 управляющего воздействия на привод 30, заставляющий вертикаль 22 через редуктор и червячную пару (65+64) крутиться противоположно машущему движению стрелы так, чтобы поддерживать возможный наклон φ на нуле. Так вертикаль 22 удерживается практически неподвижно, а баллеры 53 вертикально.
Механизм поворота колонок 54 биплана состоит из привода 87, зубчатой пары (85+83) и подшипника 84 разворота колонки на баллере 53, имеющем продольный канал, где скользящим образом проложен кабель 92 для управления мотор-редуктором 87, заставляющим колонку 54 разворачиваться при рулении на требуемый угол ее закладки. Дублирующая схема, действующая (благодаря скобе 3) синхронно, имеется и в верхней колонке биплана.
Стоп и реверс согласно Фиг.28 осуществляются соответственно отворотом друг от друга плоскостей биплана на 90° (экстренное торможение) и на 180° (реверс его тяги). Команды исполняются механизмом реверсирования тяги 81, который при подаче сигнала перемещает зубчатую рейку 101. Рейка, находясь в зацеплении с зубчатым колесом 89, фиксированным шпонкой 36 на валу 55, заставляет плоскость крыла биплана отворачиваться согласно команде на 90° или 180° а также на -90° и -180° при повторном стопе и обратном реверсе. Кабель управления 88 для ориентации крыла подан через скользкое отверстие в валу колеса 83.
3.7. Качеходы для движения в условиях умеренной волны.
3.7.1. Качеход нормального водоизмещения.
Умеренное волнение - скорее обыденное явление, чем редкость. Поэтому способность качеходов двигаться за счет энергии умеренной волны с коммерчески эффективной скоростью является залогом их широкого применения и распространения. Основой в решении поставленной задачи является увеличение площадей ватерлинии оконечных секций качехода, но не за счет удлинения их корпуса, а за счет расширения с выходом за пределы ширины центральной секции (Фиг.32, 33). На чертежах стрелы 21 показаны в убранном (задвинутом под днище) виде. Осадка оконечных секций 2 небольшая, однако, перепады сил плавучести их велики, даже при незначительном волнении и, значит, при незначительном изменении осадки секций качехода. Этих перепадов достаточно для преодоления сил пружины 56 и рабочих гидродинамических сил на крыльях 23, генерирующих тягу.
Для приведения крыловых движителей в действие, т.е. для придания судну хода, необходимо выдвинуть их стрелы 21 в рабочее состояние, т.е. за пределы махового шарнира 20, и снять тормоз качки 9 с оконечных секций 2, предоставив им возможность качаться относительно ЦС 17 и махать этими стрелами. При этом махи совершаются вокруг шарнира 20, который, по сути, связан с пеналом 44, в котором скользит стрела 21 при изменении ее вылета приводом 30.
Регулирование жесткости пружины нагружения 56, расположенной в отсеке 97, производится вручную с помощью скользящего фиксатора 58, перемещаемого винтовым приводом 100.
3.7.2. Прогулочный (спортивный) катер-качеход.
Катер предназначен для движения в условиях умеренного волнения на море или озере. С этой целью он имеет широкие поплавки 2, позволяющие тяговым крыльям 23 уверенно развивать большие тяговые усилия даже на "ленивой" низкой волне. Пара пассажиров или один пассажир и эквивалентный груз размещаются в двух симметричных кабинах, силы тяжести которых проходят через шарниры качаний 14 или близко, несмотря на то, что они составляют части оконечных секций. Последнее требование вызвано необходимостью сохранения безынерционности качаний оконечных секций 2.
Пассажиры защищены от волны и брызг отодвигающимся герметичным фонарем 99, поэтому кабины оснащены вентиляционными каналами 98. Управление катером производится пассажирами согласованно или только одним из них. Для этого в кабине имеется штурвал, насаженный на одну колонку (водонепроницаемую) с блоком 34, через который повороты штурвала передаются другому блоку 34, связанному с первым канатом 12 и расположенному на конце баллера поворотной стойки крыла 23. Канат 12 проходит внутри каналов стрелы 21.
В зависимости от веса пассажиров и груза, принятого в кузов 15, нагружающие оконечные секции, пружины сжатия 18 должны быть соответствующим образом отрегулированы. Этому служит винтовой привод 100.
4. Краткое описание чертежей и обозначений.
4.1. Краткое описание чертежей.
Фиг.1-3. 3-секционный качеход с рычажными усилителями махов тяговых крыльев (вид сбоку, сверху и снизу).
Фиг.4-5. Тяговое крыло 3-секционного качехода с Фиг.1. Виды: сверху - на наклоняемый узел колебаний носового крыла, разрез по КК; сзади - совмещенные разрезы фигуры 4 (нижний - по АА, верхний - по ББ).
Фиг.6. Вид на узел Б Фиг.1, сочленяющий рычаг тягового крыла с консольной опорой его заднего шарнира, несущей блок стабилизации вала колебаний тягового крыла.
Фиг.7-8. Узел торможения и останова качаний секций качехода (разрез по ДД с Фиг.1 и разрез по СС с Фиг.7 соответственно).
Фиг.9-10. Гибридный качеход, движимый качкой и ДВС совместно или раздельно (виды сбоку и сверху, соответственно).
Фиг.11. Разрез по АА днищевого пружинного регулируемого баланса средней (тяжелой) секции судна с Фиг.9.
Фиг.12. Разрез по ББ тягового крыла гибридного качехода с Фиг.10.
Фиг.13-14. Крыловой движитель. Виды сбоку и спереди соответственно.
Фиг.15-16. Усовершенствованная реверсивно-тяговая часть крылового движителя. Виды сбоку и спереди соответственно.
Фиг.17. Управление качеходом.
Фиг.18-19. 3-секционный качеход с шарнирами сгиба в межсекционных проемах, закрытых эластичной водонепроницаемой оболочкой. Виды сбоку и сверху.
Фиг.20-21. Буксирующая пара секций, стыкуемая с оконечностями буксируемого судна на правах оконечных секций качеходного состава. Виды сверху и сбоку (без носовой буксирующей секции).
Фиг.22. 2-секционный качеход с выбираемыми из воды и укладываемыми на его оконечные секции крыловыми движителями; основной вес судна сосредоточен в центральной шарнирной бочке.
Фиг.23. Тяговое крыло изменяемой стреловидности.
Фиг.24-27. Качеход для буксировки подводных аппаратов. По порядку: крепежная ферма, соответственно, вид снизу и сбоку; вид сверху на качеход в сборе (крыловые движители выбраны из воды и уложены на оконечные секции); вид сбоку на качеход, готовый для буксировочной работы.
Фиг.28. Качеход со штоковой шарнирной опорой для основания стрелы движителя.
Фиг.29. Вид сверху на верхнюю пару тяговых крыльев движительного механизма.
Фиг.30. Автоматическое управление положением и функциями крылового движителя.
Фиг.31. Управление процессом поддержания вертикального положения стойки биплана.
Фиг.32-33. Качеход для плавания в условиях умеренной качки (виды сбоку и сверху).
Фиг.34-35. 2-местный катер-качеход для плавания в условиях умеренной качки (виды сбоку и сверху, соответственно).
Фиг.36. Перевозка морем мостовой фермы парой секций, несущих ее на шарнирных опорах и соединенных с ней пружинными тягами, обеспечивающими горизонтальную устойчивость секций и упругость их качки.
Фиг.37. Примерная конструкция шарнирной опоры секции, на которую укладывается центральная секция.
Фиг.38. Буксировка судна морем с помощью единственной качеходной секции.
Фиг.39. Соединение трех секций параллельным спаренным шарниром, позволяющим герметизировать проем между оконечными секциями упругим пластырем и сохранить относительную поворотливость секций на шарнире.
Фиг.40. Буксировка цистерны морем с помощью пары качеходных секций.
4.2. Список цифровых обозначений и аббревиатур.
Аббревиатуры:
ДП - диаметральная плоскость,
ЦС - центральная секция,
ДВС - двигатель внутреннего сгорания,
5. Осуществление изобретения.
5.1. Общий взгляд на проблему.
Для осуществления группы взаимосвязанных изобретений, обещающих крупно масштабный коммерческий эффект внутри и за пределами России, несомненно нужна государственная поддержка в форме целевой инвестиционной программы с привлечением частного капитала. Программа должна быть направлена на оснащение всех видов флотов страны судами, движущимися за счет энергии качки, т.е., в сущности, за счет энергии волн, аккумулирующих ее от морских и океанских ветровых потоков.
Естественно, что программа должна выполняться поэтапно и включать:
- НИОКР общесистемного характера, проводимые для теоретического обоснования и экспериментальных проверок предложенных идей и решений;
- согласование с надзорными органами и службами конструкций, перечней оснащения и правил эксплуатации судов-качеходов;
- строительство опытных партий судов и кораблей, движимых энергией качки;
- продажу лицензий на массовое строительство и реализацию этих судов;
- рекламное и научно-просветительское сопровождение программы на всех ее этапах;
- включение качеходов в состав объектов торговли ВТО.
5.2. Особенности осуществления изобретений.
В связи с секционированием судна-качехода задача его строительства в принципе облегчается по сравнению с обычным судном, т.к. каждая его секция может быть изготовлена автономно на своем небольшом стапеле. Соединение секций может быть произведено после их спуска на воду, где собственно и произойдет окончательная достройка судна, серия швартовых и ходовых испытаний.
Еще проще обстоит дело со строительством оконечных буксирующих секций для сцепления с судном смешанного плавания (река-море) как с центральной тяжелой секцией для проведения судна по морю в составе сборного качехода.
Источники информации
[1] J.Nawara. Ship stabilizers, Pat. #3,004,510. Oct. 17, 1961, USA.
[2] B.P.Roach. Wave motor for generating power and propelling ships, Pat. #1,172,737. Feb.22, 1916, USA.
[3] B.F.Jackson. Self propelling boat, Pat. #1,304,318. May 20, 1919, USA.
[4] A.T Dube & others. Boat, Pat. #3,002,484. Oct.3, 1961.
[5] J.A.Gause. Water-born vessel comprising propulsion system incorporating flexible fin propulsion members, Pat. #3,453,981. July 8, 1969, USA.
[6] Choong G. Lee. Wave powered propulsion system for watercraft, Pat. #4,842,560. Jun, 27, 1989, USA.
[7] V.V.Gorshkov. Rocking ship propulsion and rocking propelled ship, Pat. #6,099,368. Aug.8, 2000.
[8] Benjamin F. Jackson. Self-propelling boat, Pat. #1,304,318. May 20, 1919, USA.
[9] V.V.Gorshkov. Power floating production and ship propulsion supported by gyroscope and energized by seas, Pat. #6,561,856. May 13, 2003, USA.
[10] V.V.Gorshkov. Wave powered cycling anchoring itinerant ship propulsion system, Pub. #US-2003-0220027-A1. Nov.27, 2003, USA.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| Кормовая оконечность стабилизированного для штормового плавания корабля | 2015 |
|
RU2607135C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 2000 |
|
RU2183176C2 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2142387C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1991 |
|
RU2031054C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2034741C1 |
Группа изобретений относится к морскому транспорту. Секционное упругосгибаемое судно делится на три секции, которые шарнирно упруго сочленены друг с другом, так что центральная грузовая секция "висит" на оконечных предельно легких безынерционных секциях, вдавливая их в воду силовым моментом пружин настолько, что они держатся на плаву горизонтально. При волнении моря равновесие нарушается, и оконечные секции приводятся в качку. Относительные движения тяжелой центральной секции и оконечных безынерционных секций, раскачиваемых волнами, преобразуются механизмами машущих качеприводных крыловых движителей в махи тяговых крыльев оконечных секций, что обеспечивает поступательное движение судна. Способ доставки грузов морем основан на формировании плавучего состава по схеме секционного упругосгибаемого судна, где в качестве груза могут быть как плавучие объекты, включая буксируемые суда, так и неплавучие объекты, включая цистерны, наполненные жидким продуктом. Группа изобретений направлена на расширение арсенала технических средств. 3 н.п. ф-лы, 40 ил.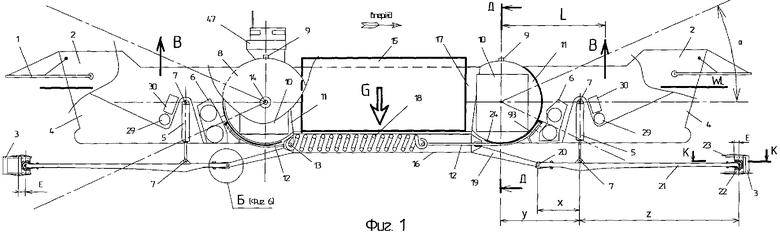
1. Секционное судно, отличающееся тем, что оно является упругосгибаемым и состоит из трех отдельных секций, соединенных между собой вдоль осевой линии поперечными ей шарнирами и упругими связями, позволяющими волнам изгибать судно по линиям шарниров, возбуждая упругую килевую качку секций, сосредотачивает в центральной секции (ЦС) подавляющую долю веса судна, оставляя легкими оконечные секции, принимающие часть веса на себя через связи с ЦС, склоняющие их в воду, порождающую на них уравновешивающие силы плавучести, содержит тормоза, ограничивающие частично или полностью килевую качку секций, происходящую вокруг соединяющих их шарниров; использует килевую и вертикальную качки секций для энергоснабжения движительного комплекса, который содержит два оконечных качеприводных крыловых движителя, тяги которых задаются по направлению и величине (в пределах мощности качки), что обеспечивает судну ход и маневренность за счет энергии волн; дополнительно комплекс содержит обычные движительные и рулевые средства, обеспечивающие судну ход и управляемость в штиль или в стесненных условиях.
2. Качеприводной крыловой движитель, отличающийся тем, что он преобразует энергию качки судна в силу, движущую его поступательно, установлен вдоль киля оконечной секции с помощью легкой жесткой стрелы, в конце которой укреплена стойка, удерживающая на вертикальном валу рулевую колонку с горизонтальным тяговым крылом, укрепленным на ней с помощью поперечной горизонтальной оси, вокруг которой крыло упруго отклоняется от горизонтальной плоскости силой гидродинамического сопротивления попеременно вверх и вниз синхронно качке; с целью увеличения амплитуды махов крыла стрела крепится корневой частью через промежуточные элементы сразу к обеим соседним секциям судна; содержит механизм стабилизации вертикального положения концевой стойки и рулевой колонки, расположенный в конце несущей стрелы; содержит пенал как дополнительный промежуточный элемент крепления стрелы к оконечной секции или к паре соседних секций, обеспечивающий ее уборку во время останова действия движителя.
3. Способ доставки грузов морем, отличающийся тем, что основан на формировании плавучего состава по схеме секционного упругосгибаемого судна (п.1), в которой центральная секция замещена грузом, подлежащим доставке морем, причем в качестве груза могут выступать плавучие объекты, включая буксируемые суда, которые оконечностями устанавливаются шарнирно на опоры предварительно притопленных легких оконечных секций состава и связываются с ними упругими связями, напрягаемыми одновременно с осушением этих секций, принимающих на себя при всплытии полностью или частично вес объекта; и неплавучие объекты, включая цистерны, наполненные жидким продуктом, перед формированием плавучего состава объект поддерживают по бокам понтонами, а оконечные секции притапливаются до установки объекта на их шарниры, после чего оконечные секции осушаются, принимая объект на себя, а понтоны убираются; сформированный состав далее движется по назначению как обычное секционное упругосгибаемое судно, где рубка и средства управления размещены на одной из оконечных секции или на судне, если оно выступает как объект доставки.
| US 6561856 В1, 13.05.2003 | |||
| Двухимпульсный регулятор угловой скорости | 1980 |
|
SU954962A1 |
| RU 2003581 С1, 30.11.1993 | |||
| Волноход Тарасова | 1980 |
|
SU962097A1 |

