1. Область техники, к которой относится изобретение.
Изобретение относится к водному транспорту, использующему энергию волн для движения и снабжения бортовых потребителей. Оно затрагивает такие области техники, как судоходство и судостроение, энергосбережение, экологию морей и океанов, рыбный промысел, туризм и спорт. Кроме того, освоение энергии волн открывает прекрасные перспективы для морского и океанского экологически чистого расселения людей вдали от суши.
Напомним, что основными потребителями качеприводных движителей сейчас могут стать обычные суда и, скорее, не новые, а старые, морально устаревшие, но которые еще жаль отправлять на лом. Винт такого судна получает доброго помощника, способного не только добавить мощности, но и эффективно его подменить, особенно в благоприятных случаях, т.е. при реальном проявлении стихией своего "характера". В результате это судно при незначительной реконструкции может продлить срок своей службы уже в качестве качехода, экономящего 30-40% своего топлива и времени и настолько же увеличивающего свою автономность и дальность плавания. Такое судно при надлежащей подготовке не должно пережидать штормовую погоду в тихой гавани, а может смело отправляться в рейс.
И наконец, качество качеприводного движителя качеходов, становящееся в настоящее время очень важным в масштабах планеты, - это полное отсутствие выбросов в атмосферу диоксида углерода, основного фактора, ухудшающего экологию Земли.
2. Уровень техники.
К сожалению, судов, которые бы приводились в поступательное движение силой волны, в жизни еще пока нет. Имеются только патенты на волновые движители и авторские модели судов-качеходов, демонстрирующие поистине неограниченные возможности устройств, придающих судну движение и энергопитание его потребителям за счет использования морского волнения. Среди патентов следует отметить патенты российских изобретателей волновых движителей Сенькина Ю.Ф., Николаева М.Н., Савицкого А.И и других [2-6].
Они сумели привлечь внимание инженеров к этому интереснейшему зарождающемуся направлению отечественного судостроения - использованию энергии волн для движения судна. Суда, использующие волновую энергию для создания или увеличения своей тяги, названы ими волноходами, а преобразователи волновой энергии в тягу - крыловыми движителями.
Серьезным недостатком волноходов, на автора, взгляд является то, что они из всей волновой энергии, воспринимаемой корпусом судна на водной поверхности, используют только ту часть, которая покрывается площадью упруго-колебательного крыла. Причем воспринятое крылом количество энергии пропорционально квадрату разности скоростей водных масс волны и самого крыла. Вместе с качающимся корпусом крыло в значительной степени повторяет вертикальное движение волн, и, следовательно, эта разность движений значительно меньше по скорости фактического вертикального волнового движения водных масс.
Повышение эффективности работы крыла получено здесь за счет увеличения его площади и увеличения вертикальной составляющей скорости его движения относительно масс воды и еще за счет приложения к нему всей энергии качающегося корпуса судна, получаемой им от волнения по всей площади ватерлинии. Для этого надо разместить крыло в относительно спокойных толщах воды и в то же время не так глубоко, чтобы не нарушить остальные характеристики судна. Глубина погружения крыла должна быть обоснована.
3. Раскрытие изобретения.
3.1. Отличительные особенности качехода и глубина установки крыла.
В отличие от изобретений Ю.Ф.Сенькина, использующих прямое взаимодействие крыла и волнового движения водных масс, представленный здесь качеприводной движитель организует взаимодействие качаемых корпусом крыльев с малоподвижными определенно глубокими массами воды. Для этого крыло кроме поступающей составляющей движения получает от качающегося судна импульсы вертикального движения, сообщаемые им через опущенные вниз вертикальные обтекаемые стойки-ножи, поддерживающие крыло на заданной глубине. Суда, использующие собственную качку для своего поступательного движения, по возникающей традиции [10-12] назовем качеходами.
Изобретатель Einar Jakobsen [7-9] пытался создать качеход в прошлом веке. Он укрепил единственное крыло на конце непомерно длинного низко опущенного вертикального киля судна, похожего на яхту, ожидая ее продвижения за счет качки. Однако эксперименты автора показали, что судно с такой конструкцией движителя теряет килевую остойчивость при качке. Кроме того, оно не может идти в стесненных условиях, заходить и швартоваться в порту, т.к. не имеет средств уборки или складывания громоздкого движителя, что делает его практическое использование в коммерческом судовождении маловероятным.
Желание повысить эксплуатационные качества качеходов, предложенных ранее [10-12], в условиях стесненного и смешанного плавания и, в частности, для судов речного флота заставили автора искать новые конструктивные решения качеприводных движителей, не выходящих или выходящих несущественно за габариты судов и отличающихся от решения изобретателя Einar Jakobsen [7-9]. Среди таких отличий следующие являются основными:
а) качеход использует не одну только вертикальную качку, как предполагает Einar Jakobsen, а, по крайней мере, два вида качки - килевую и вертикальную; в случае автономности упругих колебаний половин крыла используется также и энергия бортовой качки;
б) качеход содержит не одно, а два крыла - каждое в своей оконечности, что обеспечивает килевую устойчивость судну и сглаживает импульсы генерируемой крыльями тяги;
в) качеприводной движитель может иметь одну или две подвижные или неподвижные стойки, причем первые могут опускать крыло под воду и изымать его из воды при необходимости;
г) каждое крыло опускается на рабочую глубину, на которой высота кругового движения частиц h становится в d раз меньше аналогичной высоты ho движения поверхностных частиц воды (т.е. высоты волн).
При формулировке последнего пункта исходим из рационального обоснования архитектуры качехода для того, чтобы получить наилучшее соотношение пропульсивного качества судна и габаритов качеприводного движителя.
Показатель d назовем степенью глубинной редукции высоты волны d=ho/h. По-видимому, его значение d=10 может нас вполне устроить. По материалам наблюдений, представленных в [1], высота волн ho в морях и океанах связана с их длиной L формулой ho=0.17·L∧0.75, так что для L=50 м она составляет ho=3.2 м.
Поверхностные волны длиной L проникают на глубину у, уменьшаясь по высоте круговых орбит h согласно тому же источнику [1] до величины:

Поделив обе части уравнения на ho и инвертировав их, получим редукцию волны в зависимости от глубины погружения крыла у длины волны L:

Откуда после логарифмирования ln(d)=2πy/L находим требуемую (т.е. обоснованную) глубину опускания крыла при желаемом не меньшем значении редукции волны d, а именно

Назовем правый сомножитель в выражении (3) масштабным коэффициентом редукции волны:

Тогда получим рабочую формулу для обоснования глубины опускания крыла:

В условиях начатого примера (d=10) требуемая глубина погружения у=7.96·ln(5)≈12.8 м. Т.е. для достижения глубинного волнения на уровне 10% от поверхностного необходимо (при длине волны 50 м) опустить крыло на глубину до 13 м, т.е. на глубину, превышающую высоту волны в 4 раза. Награда за это - многократное увеличение рабочего хода крыла, а значит, и его вертикальной скорости, приводящее к увеличению тяги и эффективности установки. Но нас, скорее всего, не устроит требуемая глубина погружения крыла на 13 м, т.к. если судно небольшое, то оно становится неуклюжим по габаритным ограничениям.
Попробуем испытать 5-кратную редукцию волнения d=5, что эквивалентно глубинному уменьшению волнения до уровня в 20% от поверхностного. Ему соответствует коэффициент относительного заглубления крыла k(5)=0.146. Глубина погружения крыла составит у=0.146·50 м=7.23 м, т.е. превысит высоту волны всего в 2.2, что вполне приемлемо. Габаритная эстетика также не пострадает существенно, если движитель способен убираться на период бездействия.
Для ряда из 8 значений требуемой степени редукции волнения d=(3, 4, 5, 6, 7, 8, 9, 10) имеем соответствующий ряд значений коэффициента относительного заглубления крыла k(d)=(0.06, 0.11, 0.15, 0.17, 0.20, 0.22, 0.24, 0.26).
Примечания:
а) Если крыло находится под днищем судна, то заглубление крыла должно быть не меньше расчетной по формуле (5) и не меньше суммы осадки судна и 1.5-2 размеров хорды крыла. Рекомендуемый относительный размах крыла (длина/хорда) составляет 5-10.
б) Все сравнительные расчеты должны выполняться для некоторой рабочей длины волн, когда для обеспечения хода судна достаточно использовать только волнение. Например, это может соответствовать значительному волнению, когда [1] длина волны превышает 18 м, а высота 1.5 м. В этом случае крыло согласно расчету должно быть опущено на глубину 2.63 м.
в) С ростом длины волны растет требуемое заглубление крыла (5), которое может быть уже исчерпано (для данного конкретного судна). В этом случае для длин волны, не более чем в 1.5-2 раза превышающих длину судна, происходит прирост тяги и увеличение скорости хода качехода, т.к увеличивается рабочий ход крыла, обеспечиваемый качкой.
г) Для пологих длинных волн качеприводной движитель может оказаться неэффективным.
3.2. Качеприводной 2-стоечный движитель с неподвижными стойками.
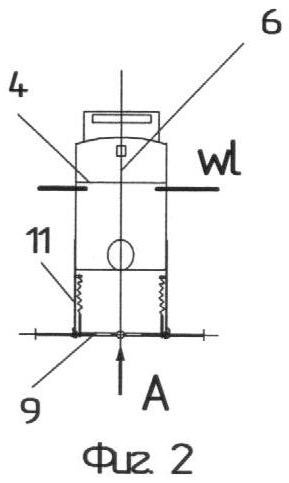
Простейший качеход Elizaveta, удовлетворяющий габаритным и эстетическим требованиям, представлен на Фиг.1-3 (виды: боковой, фронтальный и снизу). Он оснащен как обычной винтовой движительной установкой 1, так и двумя качеприводными движителями 2 и 3. Также он оснащен носовым 4 и кормовым 5 козырьковыми усилителями качки. Это новый, хотя и необязательный, элемент для качеходов и используется для получения дополнительной энергии качки, а иногда как мостик для обслуживания качеприводных движителей. Они установлены на корпусе судна в приповерхностной зоне и могут служить даже укрепительным элементом качеприводного движителя. Для жесткости усилители 4 и 5 поддерживаются упорами 6, передающими удары (т.е. энергию) волн корпусу судна 7, усиливая его качку. Судно управляется штатным образом, т.е. с помощью руля 8.
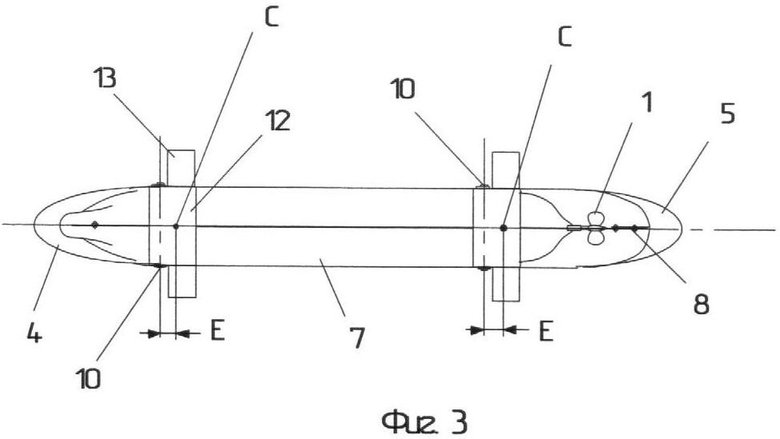
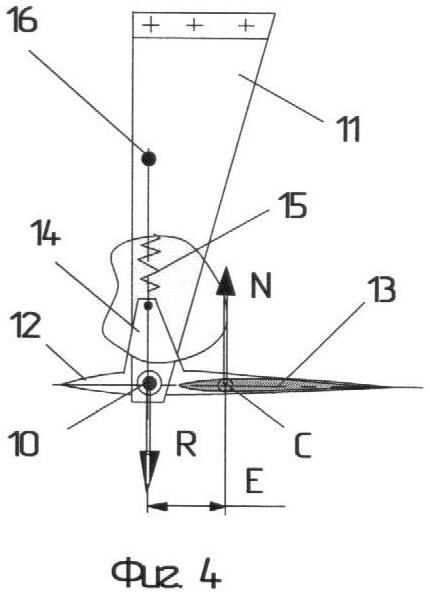
Носовой и кормовой движители 2 и 3 устроены одинаково (Фиг.3, 4, 5). Каждый состоит из крыла 9, удерживающей его оси 10 и стоек 11, укрепленных на корпусе 7. В свою очередь, каждое крыло состоит из: центральной плоскости 12 и выдвижных удлиняющих плоскостей 13, убирающихся в центральную часть крыла при необходимости (стесненные условия, нет качки, др.). Боковая часть центральной плоскости крыла имеет рычаг 14, который хорошо виден через вырез в левой стойке носового движителя (Фиг.4). Этот рычаг упругим элементом (жгутом или пружиной) 15 соединен со штифтом 16, ввернутым в стойку 11 с ее внутренней стороны.
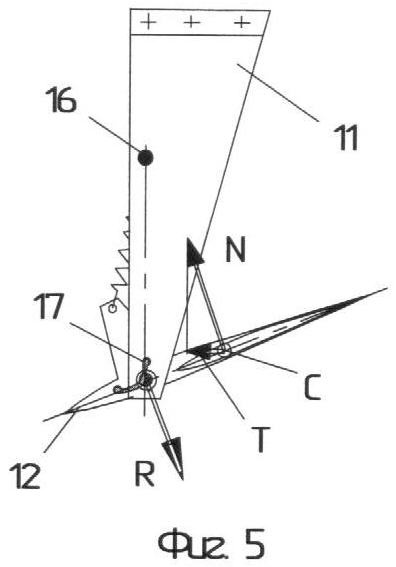
Конструкция этого узла должна быть достаточно обтекаемой, спрятанной в саму стойку. Узел обеспечивает упругую податливость крыла во время колебательных поворотов на оси 10 под воздействием силового знакопеременного момента пары сил R||N с плечом Е, возникающих во время качки (Фиг.4). Здесь R - сила реакции стоек движителя на действие со стороны крыла силы N - нормальной составляющей вектора равнодействующей сил гидродинамического сопротивления движению крыла относительно масс воды. К тому же этот узел обеспечивает упругий возврат крыла в нулевое (горизонтальное) положение. При любых вынужденных отклонениях крыла от горизонта на некоторый угол знакопеременная нормальная составляющая N и реакция R отклоняются от вертикали на такой же угол (Фиг.5). В результате генерируется тяга Т (как проекция нормальной силы N). Меняясь по величине, она сохраняет свой знак и всегда направлена от центра С приложения нормальной силы N к оси упругих колебаний крыла 10.
Изменение геометрии крыла, т.е. выдвижение и уборка концевых плоскостей крыла 13, производится с помощью дистанционного управления. Для этого из рулевой рубки или иного поста управления на крыло с соблюдением условий гидронепроницаемости через стойку 11 и торец центральной части крыла 12 (Фиг.5) подается гибкий кабель 17. Через него на пульт управления поступают сигналы о положении крыла 9(12) и его удлинителей 13, а на крыло передаются команды управления их положением. Еще на крыло могут поступать сигналы регулирования натягом упругих элементов 15.
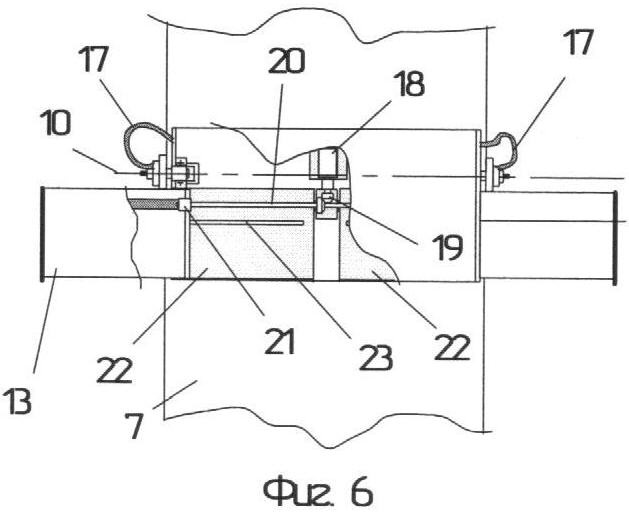
Если приходит команда уборки концевых удлинителей крыла 13 (Фиг.6), то через кабель 17 она поступает на погружной (способный работать под водой) привод 18, который через коническую зубчатую передачу 19 приводит во вращение двусторонний винт 20. Этот винт имеет два конца, исходящих от конической передачи 19 в обе стороны крыла, где они входят в зацепление со встроенными гайками 21 удлинителей крыла 13. Оба конца винта и гайки к ним имеют противоположные нарезки, так что при одном вращении винта оба удлинителя крыла сходятся, а при другом - удаляются от центра. При этом они, соответственно, либо заполняют полости 22 (уборка удлинителей), либо освобождают ее.
Сила гидродинамического давления на крыло и, следовательно, сила тяги, обеспечивающей пропульсивную мощность движителя, прямо пропорциональна действующей площади крыла S. Это говорит о необходимости увеличения S, когда открывается возможность. Но не каждое увеличение S эффективно. Так, увеличение площади за счет увеличения хорды крыла х (Фиг.1) может даже уменьшить мощность движителя, потому что на перекладку крыла с увеличенной хордой требуется затратить увеличенную часть амплитуды вертикального хода.
Установка движителей в оконечностях судна увеличивает амплитуду их вертикального хода и тягу каждого из них. Дополнительно амплитуда самой качки растет за счет установки в оконечностях судна козырьковых усилителей качки. Наличие же двух качеприводных движителей вносит равномерность в процесс формирования суммарной тяги, сглаживая тем самым продольные ускорения качехода.
3.3. Качеприводной 2-стоечный движитель с поворотными стойками.
На практике условия мореплавания постоянно меняются и предъявляют свои требования к качеприводному движителю. В случае слабого волнения и умеренной качки или при ее отсутствии необходимо спрятать крылья, максимально уменьшив их гидродинамическое сопротивление. То же надо сделать при плавании в стесненных условиях: малые глубины, узкий фарватер, акватория порта и т.д. Обозначим эту ситуацию как (а).
Для открытого плавания в условиях эффективного волнения, т.е. такого, при котором применение движителей оправдано, необходимо либо максимальное погружение тяговых крыльев при длинной волне, например когда преобладает вертикальная качка (ситуация b), либо сильное их разведение по килю, например когда преобладает килевая качка (ситуация с). А если требуется осмотр крыльев, их профилактический ремонт, наладка и т.п., когда на море штиль и надо идти на штатном движителе 1, то крылья лучше "сушить", т.е. изъять из воды (ситуация d).
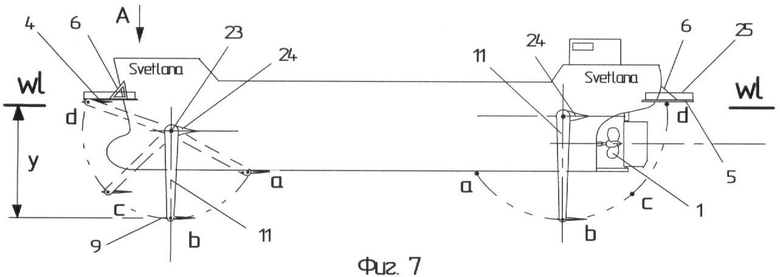
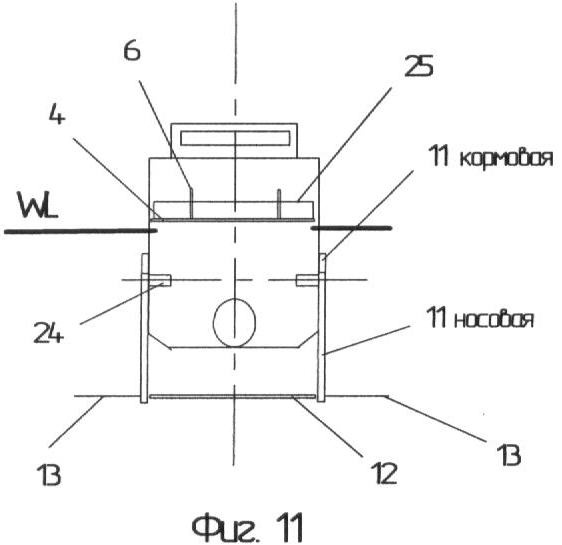
Именно этим требованиям отвечает конструкция носового и кормового 2-стоечного движителя, которыми оснащен качеход Svetlana (Фиг.7, 8, 11). Обе стойки 11 движителя (Фиг.9) укреплены на корпусе шарнирно каждый собственным валом 23, проходящим во втулке 26 через специальные обтекаемые приливы 24 перпендикулярно диаметральной плоскости (ДП) соосно друг другу. Приливы 24 могут незначительно выходить за пределы габаритов судна, чтобы при синхронном (обязательно!) повороте обеих стоек 11 последние не касались бортов судна. Требуемая синхронность обеспечивается автоматической синхронизацией работы двух приводов стоек. Здесь, как и на качеходе Elizaveta (Фиг.1-3), использованы козырьки усиления качки 4 и 5, но уже оснащенные леерами 25 с возможностью матросам располагаться на них для наладки и ремонта механизмов управления тяговых крыльев 9.
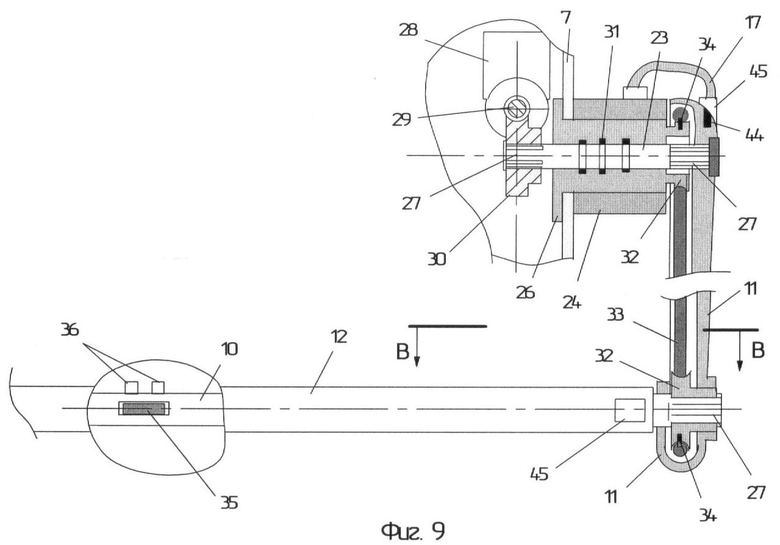
Привод 28 при подаче сигнала из рубки управления валом 23 поворачивает стойку 11, насаженную на вал с помощью внешних шлицев 27. Передача приводом 28 движения валу 23 осуществляется червячной парой 29-30, используя шлицы 27 на внутреннем конца вала 23. Чтобы вода не могла попасть в корпус судна 7, втулка 26 устанавливается в бортовую стенку корпуса глухо, а вал 23 во втулке 26 - с применением герметизирующих колец 31 или других технологий. Неподвижная втулка 26 заканчивается снаружи блоком 32, через который переброшен и намертво закреплен шпилькой 34 (или иначе) кольцевой канат 33. В нижней части стойки 11 кольцевой канат 33 накинут на блок 32, который по торцу имеет цилиндрическую часть, свободно вращающуюся в концевом отверстии стойки 11. Таким образом, когда стойка поворачивается, нижний блок 32 проворачивается в этом отверстии, оставаясь в пространстве неподвижным, т.е. стабилизированным или нейтральным по отношению к углу колебаний крыла. Так, блок 32 стабилизируется канатом 33, который здесь также закреплен на блоке другой шпилькой 34.
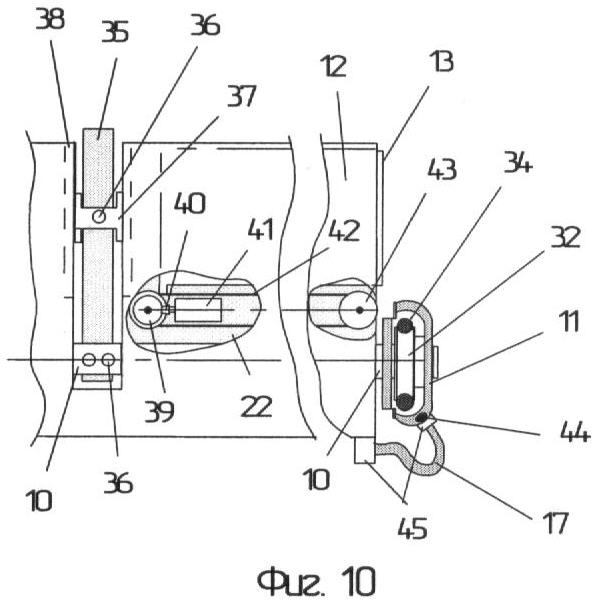
Поскольку нижний блок 32 посажен на ось крыла 10 с помощью шлицевого соединения 27, то стабилизированной оказывается вся ось 10. Ось испытывает скручивающие нагрузки от механизма упругости колебаний крыла, сидящего на этой оси. Основным элементом этого механизма является полосковая пружина 35, закрепленная одним концом винтами 36 в прямоугольной щели оси 10, а другим с помощью аналогичного винта 36 - в ползуне 37, который можно переместить ближе или дальше от оси 10, отвернув винт 36. Это изменяет степень упругости полосковой пружины 35 и, сответственно, степень упругости колебаний крыла. Для этого ползун 37 с закрепленной в нем полосковой пружиной 35 вставлен в боковые пазы 38, сделанные по краям прямоугольного выреза в центре крыла 12 (Фиг.10).
Здесь же (Фиг.10) представлен механизм индивидуального выдвижения удлинителя крыла 13, расположенного вместе с крылом в полости крыла 22. Он состоит из зубчатой конической пары 39-40, приводимой в движение приводом 41. В результате чего вращается коническое зубчатое колесо 39 с расширенной цилиндрической частью, нарезанной как цилиндрическое зубчатое колесо. На него и колесо 43 надета зубчатая ременная паредача 42, отчего она перемещается сама и перемещает сцепленный с ней удлинитель 13 крыла 12. В зависимости от направления вращения привода 41 удлинитель 13 будет либо выезжать из центральной части крыла, либо, наоборот, втягиваться в нее. Выдвигая из нее оба удлинителя по-разному, можно смещать от ДП создаваемую крылом тягу, тем самым заставляя качеход слегка маневрировать. Главная же цель механизма выдвижения удлинителя крыла состоит в обеспечении симметричного именения геометрии крыла в соответствии с возникающими ситуациями (см. начало этого параграфа).
Электроэнергия и сигналы для этого механизма поступают (Фиг.9) из рулевой рубки по внутреннему кабелю через герметичные каналы в корпусе 7 и бобышке 24, через герметичные разъемы 45, по внешнему кабелю 17, внутреннему кабелю стойки 11, уложенному в ее канале 44, далее (Фиг.10) по герметичным разъемам 45 и соединяющему их кабелю 17 в крыло 12, где его жилы по разводке достигают привода 41 и сигнализаторов состояния крыла. Последние очень желательны. В качестве автоматически измеряемых параметров могут быть: угол колебаний крыла при работе во флюгерном режиме и фактическая амплитуда его колебаний, положение удлинителей крыла и положение органа настройки упругости колебаний крыла 37. Примечание: Усилители качки 4 и 5 могут использоваться здесь не только по прямому назначению, для чего они размещены в непосредственной близости от поверхности воды, но и для обслуживания механизмов тягового крыла 9 (и его центральной части 12).
3.4. Качеприводной 1-стоечный движитель с поворотной стойкой.
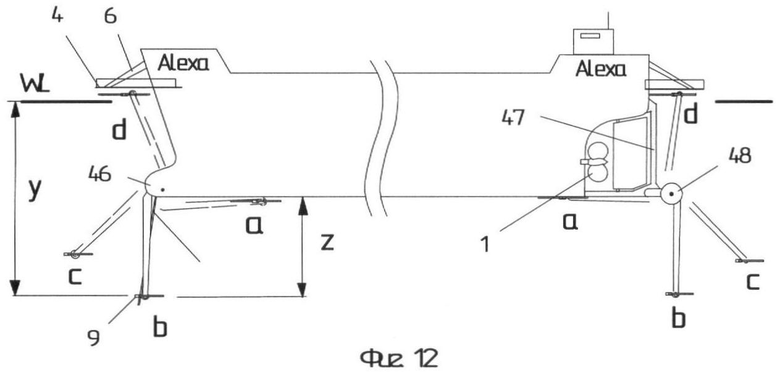
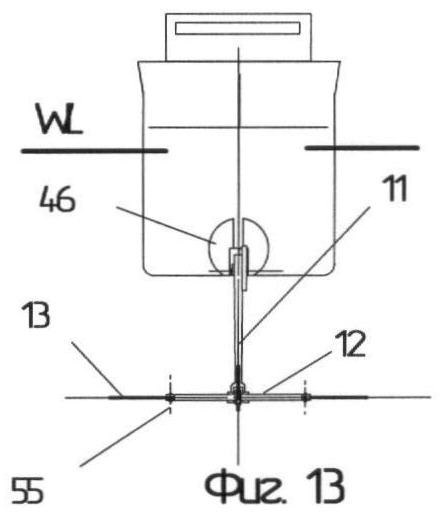
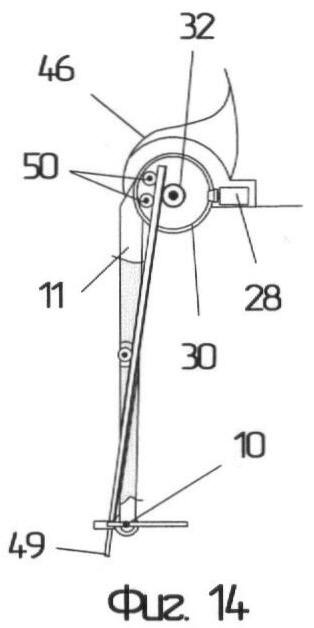
Двумя такими движителями оснащен гипотетический качеход Alexa (Фиг.12 и Фиг.13). Шарнирный механизм разворота стойки тягового крыла 9 спрятан в буле 46 или в кормовом футляре 48. С его помощью дистанционно стойке крыла 11 могут быть приданы разные угловые положения, необходимые для эффективного применения его в разных условиях плавания и швартовки. Ситуации аналогичны тем, что описаны в начале п.3.3. Соответственно им носовое и кормовое крыло по отдельности или вместе могут быть установлены в положениях а, b, с, d.
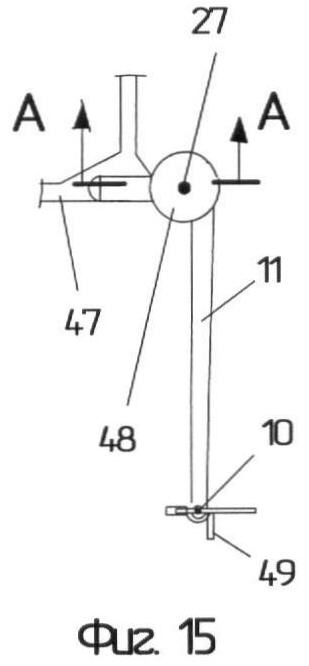
В отличие от носового кормовой движитель крепится в кормовой части с помощью специальной прочной консоли 47, являющейся продолжением киля, подальше от гребного винта. Там и устанавливается механизм разворота стойки тягового крыла, заключенный в обтекаемый футляр 48. Различие в месторасположении движителя не требует конструктивных изменений в нем.
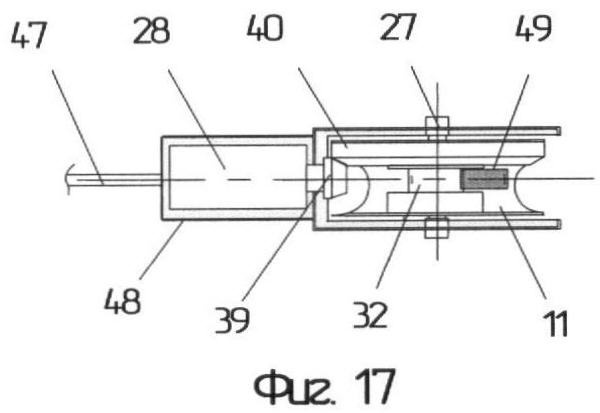
Рассмотрим подробнее носовой движитель, представленный на Фиг.14 при снятой половине кожуха буля 46. Внутри его привод 28 своей конической шестерней 39 приводит во вращение (Фиг.17) коническое колесо 40, поворачивая стойку крыла 11 в нужное угловое положение. Рядом с колесом 40 на одной и той же оси 27 сидит колесо 32 меньшего диаметра, относящееся к механизму горизонтальной стабилизации оси упругих колебаний крыла. Оно насажено неподвижно на ось 27, фиксированную в кожухе обтекателя 48, закрепленного консолью 47 на корпусе судна. Таким образом, колесо 32 относительно судна неподвижно. И, когда коническое колесо 29, ведомое приводом 28, поворачивается вместе со стойкой 11, колесо 32 удерживает неподвижным другое такое же колесо 32 в конце стойки с помощью рейки 49, входящей в зацепление с обоими колесами одновременно. Тем самым сохраняется фиксированным угловое положение оси колебаний тягового крыла 10, так как концевое колесо 32 удерживается на нем без проворотов.
Отметим, что рейка 49 постоянно прижата к зубчатым колесам 32 роликами 50. Реечный механизм стабилизации оси упругих колебаний крыла 10 использован здесь как еще одна его разновидность вслед за канатным (Фиг.9). Но этот механизм не позволил объединить обе стороны крыла в одно монокрыло, т.к. конец рейки 49 выступает за габариты колеса 32 и при повороте стойки 11 может рассекать предположительное место соединения обеих половин крыла. Однако это позволило управлять упругостью колебаний каждой из половин крыла автономно.
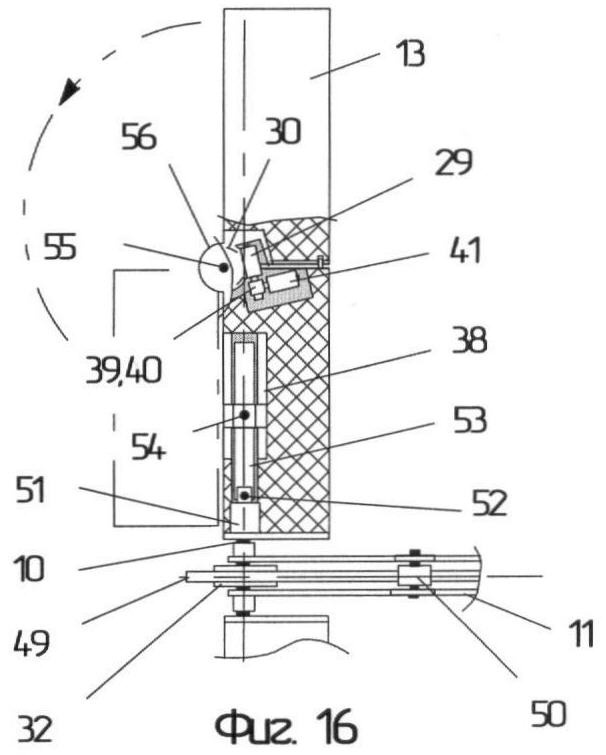
Рассмотрим правую половину крыла (Фиг.16). Общая ось колебаний 10 входит в эту половину с помощью подшипника-замка 51, надежно удерживающего ее и тем самым обеспечивая свободное вращение крыла на оси. В то же время ось выступает из подшипника и попадает в цилиндрическую полость крыла, где зажимает торцевой прорезью и винтом 52 полосковую пружину кручения 53. Посредине пружина закреплена винтом ползуна 54, который соединяет ее с крылом посредством продольных пазов 55. Регулируя положение ползуна 54 в продольной полости крыла через щель доступа (не показана), можно придать требуемую упругость колебаний крылу для обеспечения его наибольшей производительности в заданных условиях плавания. При настройке движитель надо установить в положение d, в котором матрос, находясь на козырьке усилителя качки 4 или 5, способен достичь механизма настройки упругости колебаний крыла (ползун и винт 54) и выполнить настройку.
В рабочих положениях (b, с) крыло разворачивает удлинители 13, которые в других двух положениях (a, d) сворачиваются на шарнирах 55 (Фиг.16, 13), удерживающих их на центральной части крыла 12. Операция смены геометрии крыла производится приводом 41, конической зубчатой парой 40, червяком 29 и червячным колесом 30, являющимся частью удлинителя крыла 13 (неиспользуемая часть зубчатой окружности приварена к корпусу удлинителя). Колесо 30 зажато на оси поворота 55 удлинителя 13 между парой дисков (вилкой) 56, являющейся шарниром, выступающим на углу центральной части крыла.
Управление положением удлинителя производится дистанционно с рулевой рубки через водонепроницаемый кабель связи, протянутый аналогично тому, как это сделано для качехода Svetlana (Фиг.9, 10). В случае выхода из строя или по иным причинам это можно сделать вручную в момент, когда крыло подано в позицию d.
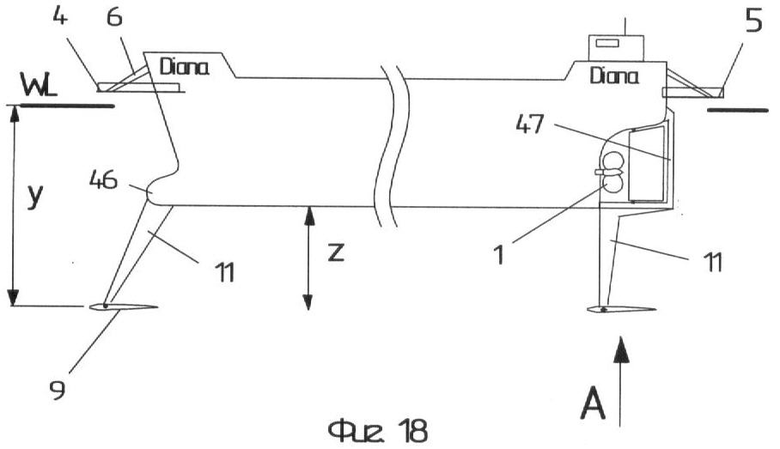
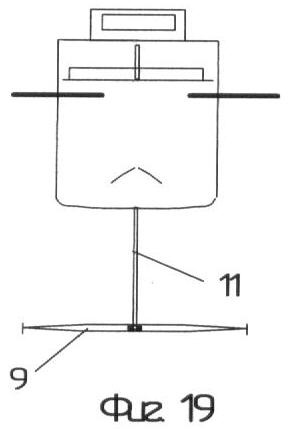
3.5. Качеприводной 1-стоечный движитель с неподвижной стойкой.
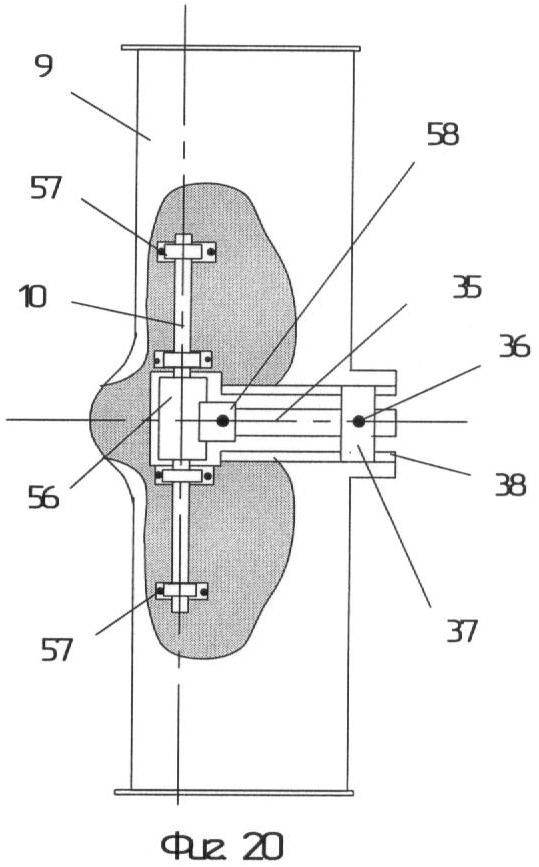
Качеприводной движитель с жесткой архитектурой (Фиг.18, 19, 20) сдержит только один подвижный элемент - это тяговое крыло 9, способное упруго колебаться вокруг оси 10, удерживаемой во втулке 56, для чего служат подшипники 57 и полосковая пружина 35, закрепленная в щели держателя 58, приваренного к втулке 56. Из-за этого она действует как упругая консоль и удерживает крыло 9 от свободного вращения через посредство ползуна 37, сцепленного с направляющими 38 в центральной прорези, выполненой поперек крыла. Ползун может быть смещен вдоль пружины и прорезей, что позволяет должным образом отрегулировать упругость колебаний крыла, настроив его на соответствующую мощность волнения с целью получения максимальной средней тяги движителя. Опыты с моделями показывают, что отсутствие настройки упругости крыла может дискредитировать саму идею качеприводного движителя.
Если судно небольшое и ходит в районах малых и средних волн, а также швартуется к причалам с достаточной глубиной, то вариант движителя с неподвижной стойкой не только допустим, но и еще очень экономичен. В этом случае его следует оснастить надежным механизмом дистанционной настройки упругости колебаний крыла.
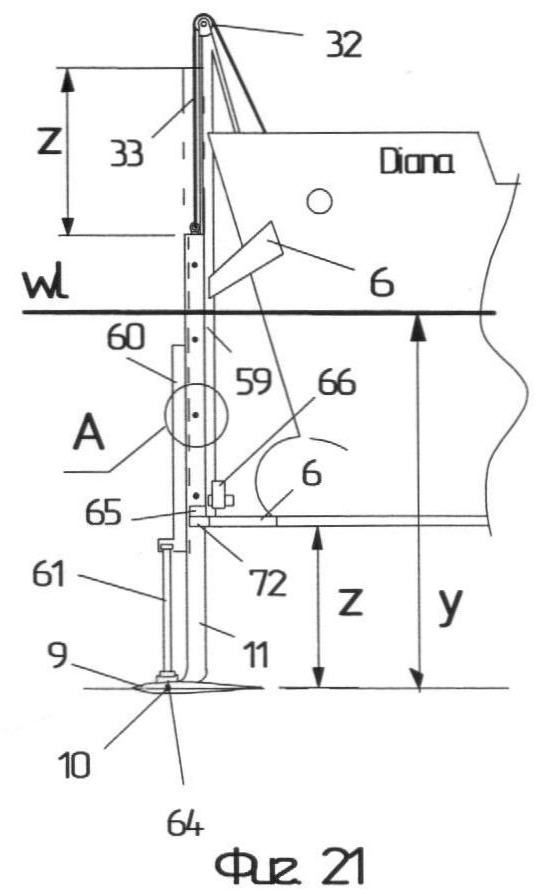
3.6. Качеприводной движитель со скользящей стойкой и складным крылом.
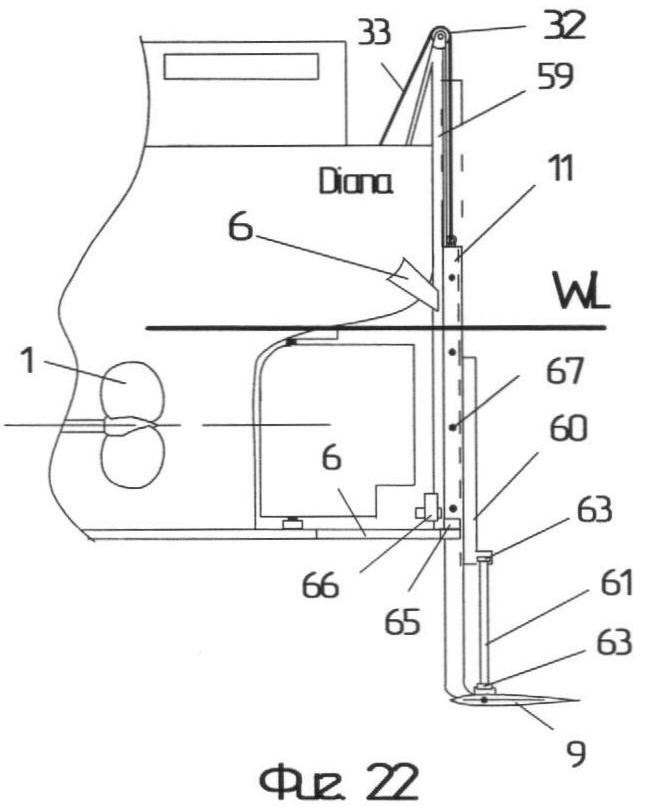
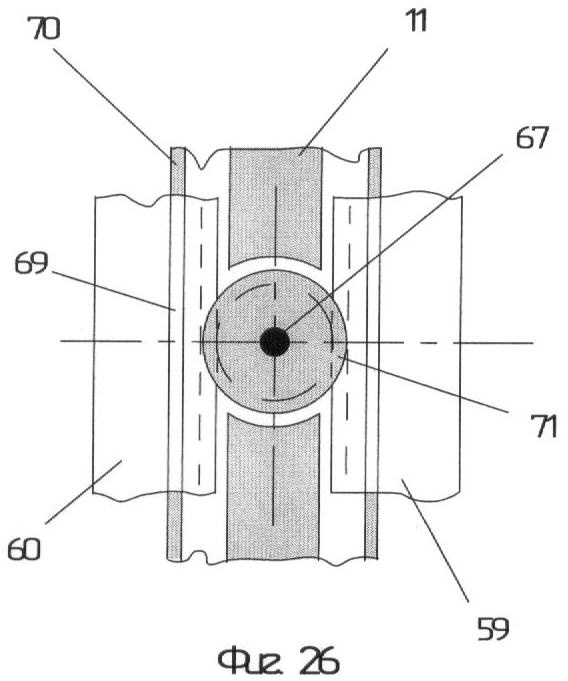
Движитель состоит (Фиг.21, 22, 23) из вертикального рельса 59, укрепленного к корпусу судна в точках контакта и с помощью консолей 6 длиной, подогнанной по месту. Стойка 11 с [■]-образным профилем сечения, надетая на рельс 59 своим раздвоенным ребром, скользит и опускается по рельсу на заглубление Z ниже днища с помощью каната 33, перекинутого для этого через блок 32. Стойка состоит из двух параллельных коробчатых полос, обращенных друг к другу, но не соприкасающихся краями. Для этого полость между ними прерывисто наполнена пластинами, отделяющими их края друг от друга, но удерживающими полосы вместе, формируя стойку. Между пластинами (Фиг.26) виден участок стойки 11 со снятой полосой: на осях 67, перпендикулярных полосам, внутри полости стойки установлены зубчатые колеса 71. Краями полос 70, как раздвоенными ребрами, стойка охватывает с одной стороны рельс 59, с другой - направляющее ребро каретки 60. И рельс 59, и ребро каретки 60 имеют направляющие пазы 69, в которые входят загибающиеся края полос 70, так что все три участника скольжения неразрывно связаны между собой.
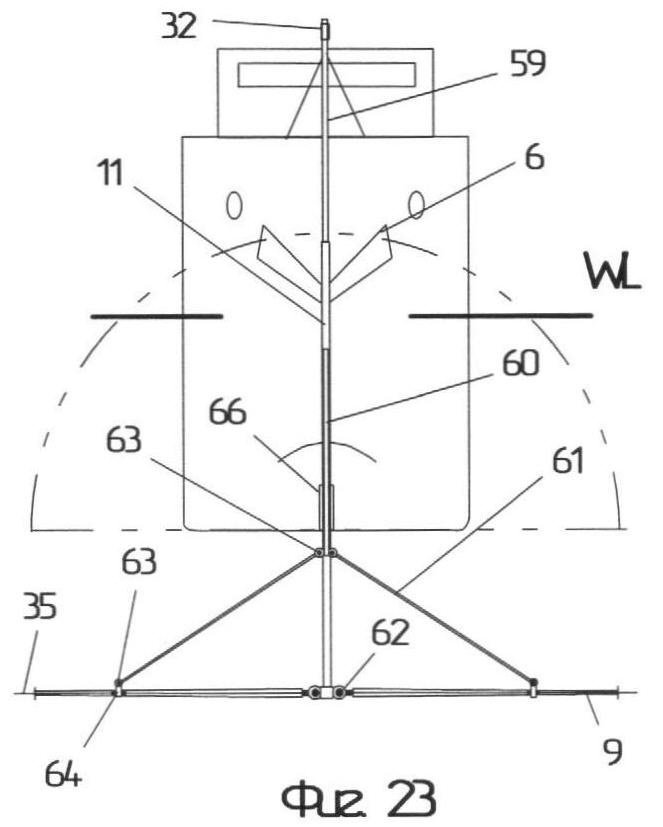
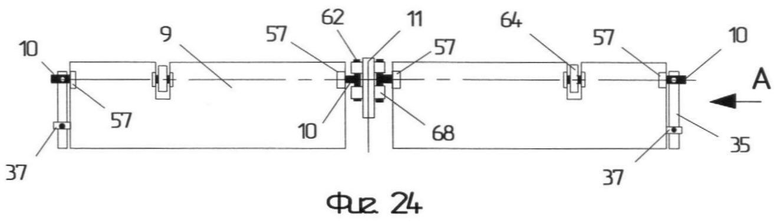
Рельс и ребро каретки имеют свою продольную зубчатую нарезку. Находясь ребрами внутри стойки 11, они входят в зацепление с зубчатыми колесами стойки. При ее движении по рельсу 59 каретка 60 обгоняет стойку, т.к. зубчатые колеса 71 вращаются и дополнительно продвигают каретку 60 вперед или назад по ходу движения стойки. Используя эту особенность, мы заставляем каретку раскладывать или складывать половины тягового крыла 9. Для этого они укреплены внизу стойки шарнирами 68 с помощью поперечных осей 62, приваренных к осям колебаний половин крыла 10. Кроме того (Фиг.23, 24), эти оси и каретка 60 соединены распорками 61, прикрепленными к основанию каретки и к осям колебаний крыла 10 с помощью поперечных шарниров 63.
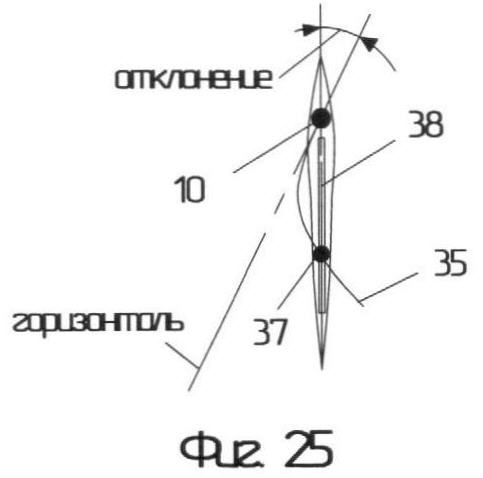
При раскрытии крыла 9 стойка 11 опускается канатом 33 до упора, если электромагнитная защелка 66 включена, т.е. ее сердечник убран с пути стойки. В этом случае стойка 11 скользит по рельсу 59 до касания ее ограничителя 65 упора 72, расположенного в конце рельса. Как только произойдет касание, электрическая обмотка защелки обесточивается и защелка срабатывает, закрывая ограничителю 65 и, соответственно, всей стойке 11 обратный ход. Теперь работе качеприводного движителя ничто не мешает. Предполагается, что необходимые настройки упругости колебаний половинок крыла выполнены, когда крыло еще находилось в сложенном состоянии, при котором (Фиг.24) полосковые пружины 35 доступны для настройки. Каждая закреплена одним концом в щели оси упругих колебаний 10, другим - в ползуне 37, установленном в щели 38 с торца крыла (Фиг.25) и удерживающем соответствующую половину крыла от свободных колебаний на оси 10.
Движитель отличается существенным упрощением управления благодаря использованию двусторонней зубчатой передачи, обеспечивающей автоматическое заглубление и раскладывание половин тягового крыла движителя при его опускании и, наоборот, складывание и изъятие из глубины при его подъеме.
4. Краткое описание чертежей и обозначений.
4.1. Чертежи.
Фиг.1-3. Качеход Elizaveta в трех видах: боковом, фронтальном и снизу. Тяговые упруго-колебательные крылья установлены под корпусом качехода на расчетной глубине у стойками. Качеход имеет козырьковые усилители качки, установленные на его оконечностях.
Фиг.4-5. Носовой и кормовой качеприводные движители в увеличенном масштабе. Схема основных сил, действующих при качке.
Фиг.6. Тяговое упруго-колебательное крыло в разрезе, поясняющем, как оно раздвигается с целью увеличения своей рабочей площади. Показан электропривод двустороннего винта, сдвигающего и раздвигающего удлинители крыла (боковые подвижные плоскости), находящиеся в его полости на время плавания качехода в отсутствие качки или в стесненных условиях.
Фиг.7. Качеход Svetlana с 2-стоечными качеприводными движителями, имеющими поворотные стойки, способными, каждый, находиться в 4-х характерных положениях: а - ждущее, в - основное рабочее, с - дополнительное рабочее, d - просушка. Вид спереди см. на Фиг.11.
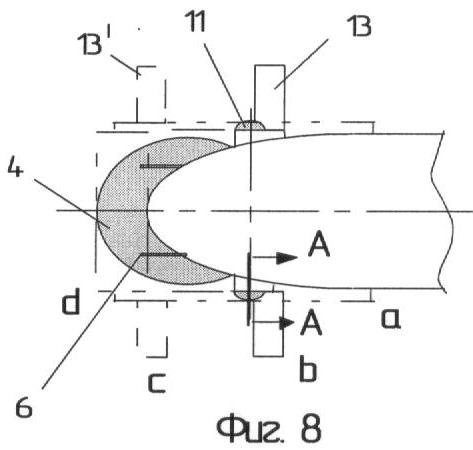
Фиг.8. Носовая часть качехода (вид сверху). Показаны: козырек усиления качки (тонирован), носовой качеприводной движитель в рабочем положении b, возможные смещения.
Фиг.9. Механизм установки тягового крыла в различные функциональные положения и механизм стабилизации вала упругих колебаний крыла в горизонтальном положении. Вид по разрезу ВВ представлен на Фиг.10.
Фиг.10. Усеченный вид сверху на крыло в разрезе ВВ, обозначенном на Фиг.9. Показаны механизм наладки степени упругости колебаний крыла и механизм дистанционного разведения удлинителей крыла.
Фиг.11. Вид спереди на качеход Svetlana с движителями, представленный на Фиг.7.
Фиг.12. Качеход Alexa с 1-стоечными движителями, способными находиться в 4-х положениях: а - ждущее, в - основное рабочее, с - дополнительное рабочее, d - на просушке.
Фиг.13. Вид спереди на качеход Alexa. Механизм смены тяговым крылом положений вписался в буль, где находятся шестерня и рейка горизонтальной стабилизации оси 10.
Фиг.14. Носовой 1-стоечный качеприводной движитель на шарнире в буле со снятым кожухом, под которым расположен механизм поворота стойки-держателя крыла. В стойке, имеющей технологический сгиб, сделан вырез для демонстрации положения рейки механизма горизонтальной стабилизации оси 10.
Фиг.15. Кормовой качеприводной движитель с шарнирным механизмом поворота стойки, расположенным в обтекаемом футляре. По середине футляра проходит разрез АА, содержание которого показано на Фиг.17. На конце стойки расположена пара тяговых крыльев.
Фиг.16. Пара тяговых крыльев на их общем валу для упругих колебаний. Левое крыло усечено, а правое раскрыто частичным вырезом, охватившим всю центральную секцию и часть удлинительной секции. Последняя укреплена на центральной секции шарнирно с целью возможного поворота на 180° и постановки торец в торец для удлинения крыла или, наоборот, складывания до упора кромками с центральной секцией.
Фиг.17. Механизм поворота стойки пары тяговых крыльев, помещенный в обтекаемый футляр, верхняя часть кожуха которого срезана согласно наметке АА Фиг.15.
Фиг.18, 19. Качеход Diana с самыми простыми качеприводными движителями, которые жестко установлены (их стойки приварены) в начале и конце киля. Виды сбоку и спереди.
Фиг.20. Вид на крыло качехода Diana снизу (по стрелке А с Фиг.18). В вырезе показан механизм обеспечения упругости колебаний тягового крыла.
Фиг.21. Вид сбоку на носовой извлекаемый качеприводной движитель с механизмом раскрытия (половин) тягового крыла, складывающегося по схеме «бабочка».
Фиг.22. Вид сбоку на кормовой извлекаемый качеприводной движитель с механизмом раскрытия (половин) тягового крыла, складывающегося по схеме «бабочка».
Фиг.23. Вид спереди на носовой извлекаемый качеприводной движитель с механизмом раскрытия (половин) тягового крыла, складывающегося по схеме «бабочка».
Фиг.24. Вид снизу на тяговое крыло, складывающееся по схеме «бабочка» и имеющее индивидуальный механизм настройки упругости колебаний для каждой половины.
Фиг.25. Вид сбоку на тяговое крыло с напряженной пружиной упругих колебаний левой половины крыла.
Фиг.26. Срез узла А (Фиг.21) механизма опускания и раскрытия тягового крыла носового извлекаемого качеприводного движителя.
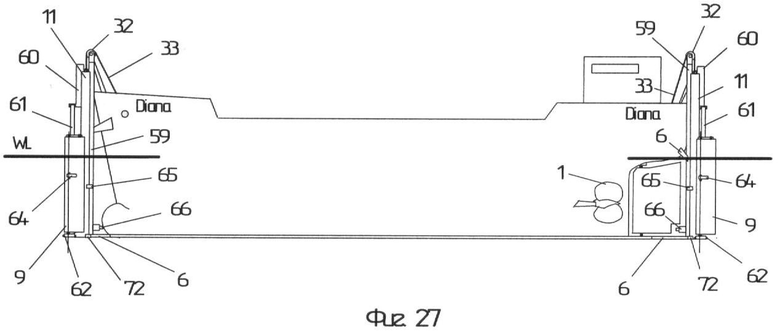
Фиг.27. Вид сбоку на качеход в состоянии, в котором он извлек с глубины и сложил свое тяговое крыло по схеме «бабочка», т.е. в положение минимальной помехи для моторного хода.
4.2. Числовые обозначения.
5. Осуществление изобретения.
Осуществление изобретения возможно при создании нового судна и при модернизации действующего, а также при реставрации списанного судна, способного оставаться на плаву и сохранившего хоть какой-то ход, чтобы обеспечить маневренность судна в стесненных условиях. Суть состоит в том, что созданный после модернизации или реставрации качеход должен использовать качеприводную движительную установку как маршевую, т.е. на основных переходах по морю. Судно должно ловить волнение моря, чтобы идти. Суда-спасатели - это основные претенденты на превращение в качеходы путем их оснащения качеприводными движителелями. Вторые на очереди суда патрульной службы и рыболовецкий флот, затем коммерческие суда разного назначения и суда смешанного плавания речного флота.
Поскольку длина судна влияет на его способность к качке, то рекомендуемые размеры качеходов соотносятся с преобладающими размерами волн для данного района плавания. Автору представляется, что для эффективного использования качеприводных движителей относительная длина волны должна находиться в диапазоне от 0.3 до 2 длин судна.
Производство качеприводных движителей может быть унифицировано и поставлено на поток, т.к. оно практически не затрагивает архитектуру судна и его техническое оснащение. При подготовленной технологии и выполненном заранее проекте модернизации судна монтаж на него пары качеприводных движителей может занять не более одного-двух дней.
Производство самого качеприводного движителя доступно не только солидному машиностроительному предприятию, но и малому судоремонтному предприятию. Успех обеспечен высокой экономической эффективностью движителя и заметным улучшением окружающей экологической обстановки, с одной стороны, а с другой, улучшением обитаемости судна, ставшего качеходом. Как ни странно, но качеход качает меньше, чем обычное судно. Причина заключается в сокращении реальной качки, т.к. вертикальная и килевая виды качки преобразуются качеходом в поступательное движение, а боковая качка резко снижается из-за демпфирующего действия стоек. Кроме того, практически исчезает шум и какие бы то ни было загрязнения воды и воздуха. Т.е. мы имеем дело с экологически чистым движителем. Иначе говоря, с какой стороны ни посмотри, видны одни лишь плюсы.
Библиография
1. Динамика подводных буксируемых систем. СПб.: Судостроение, 1995.
2. Сенькин Ю.Ф. Судовой волновой движитель. Авт. свид. SU 3628538/27-11, В63, 04.08.83.
3. Сенькин Ю.Ф. Волновой движитель судна. Авт. свид. SU 3971501/27-11, В63, 04.11.85.
4. Василий Фатигаров. Корабль движется энергией волн. Газета «Красная звезда», 96.
5. Николаев М.Н., Савицкий А.И., Сенькин Ю.Ф. Основы расчета эффективности судового волнового движителя крыльевого типа. Судостроение, №4, 95.
6. Сенькин. Ю.Ф. Судовой волновой движитель. Авт. свид. №3628538/27-11, В63, 04.08.83.
7. Эйнар Якобсен (Норвегия). Волновой движитель судов. Пат. №946396, М. кл. В63Н 1/36, 11.11.77.
8. Einar Jakobsen. Wave motors. US Pat. №4.332.571, Int. class B63H 1/30, B63H 5/00, 01.06.82.
9. Einar Jakobsen. Wave motor, especially for propulsion of boats. US Pat. № 4.371.347, Feb.1, 83.
10. V. Gorshkov. Rocking ship propulsion and the rocking propelled ship. US Pat. №6,099,368. Aug.8, 2000.
11. V. Gorshkov. Power floating production and ship propulsion supported by gyroscope and energized by seas. US Pat. №6,561,856. May 13, 2003.
12. V. Gorshkov. Wave powered cycling anchoring itinerant ship propulsion system. US Pub. №0220027-A1. Nov.27, 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2542677C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| Волнодвижители подводного судна | 2017 |
|
RU2668483C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2488518C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Судно | 1990 |
|
SU1796547A1 |
Качеход - это судно, предназначенное для использования энергии качки для поступательного движения в условиях достаточного волнения водной поверхности. Качеприводной движитель содержит упруго-колебательное крыло в качестве генератора тяги. Крыло получает машущие движения от качки корпуса судна, для чего устанавливается на обтекаемых стойках-держателях ниже днища судна на расчетной глубине. На этой глубине можно считать волнение воды отсутствующим, не уменьшающим разность вертикальных скоростей крыла и воды (тяга крыла пропорциональна квадрату разности). Для обеспечения максимальной тяги крыла движитель устанавливается в районе оконечности судна. Действие отдельного крыла усиливается, если в каждой из оконечностей качехода устанавливать свой движитель, тяга и знакопеременные ускорения при этом сглаживаются. Конструкция качеприводного движителя отличается количеством стоек - одна или две, подвижностью движителя - подъемный, поворотный или неподвижный, наличием убирающихся удлинителей крыла, независимостью упругих колебаний половин крыла, возможностью их складывания.
Судно оснащено двумя качеприводными движителями. На оконечностях судна вблизи ватерлинии установлены плоские горизонтальные козырьки, а также установлены винтовые движители, обеспечивающие ход судну в условиях умеренной качки. Достигается увеличение дальности и скорости плавания судна, снижается расход топлива. 2 н. и 6 з.п. ф-лы, 27 ил.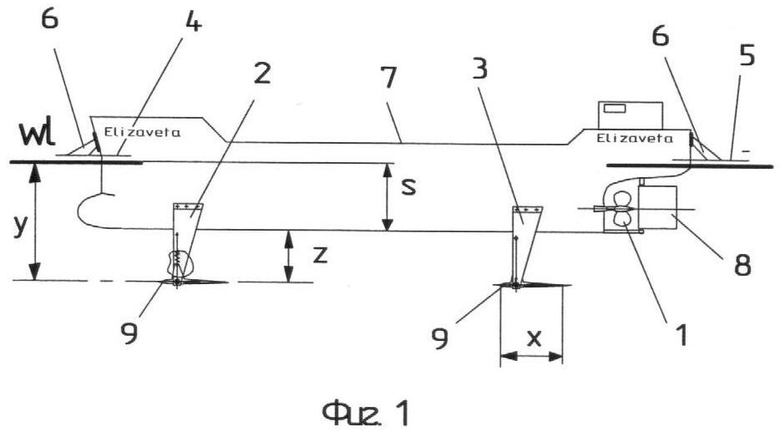
1. Судовой качеприводной движитель, придающий судну ход за счет энергии качки и прикрепленный к корпусу судна в районе его оконечности жесткой связью так, что его тяговое упругоколебательное крыло оказывается ниже расчетной глубины и ниже днища судна на одну хорду крыла, а ось его колебаний ориентирована поперек диаметральной плоскости; крыло упруго колеблется вокруг оси под действием силы гидродинамического сопротивления (СГС), испытываемой крылом во время качки, передаваемой корпусом судна оси крыла через имеющуюся между ними жесткую связь; наличие эксцентриситета между осью колебаний крыла и центром приложения к нему вектора нормальной составляющей СГС вызывает совместные наклоны крыла и этого вектора, сопровождающиеся появлением горизонтальной проекции вектора, являющейся тягой движителя, переменной по величине, но неизменной по направлению, в сторону оси колебаний крыла.
2. Качеприводной движитель по п.1, отличающийся тем, что его крыло может в рабочем состоянии удлиняться выводом в стороны плоских удлинителей и укорачиваться в нерабочем, возвращением их в исходное положение; обе операции выполняются приводом, встроенным в крыло и управляемым дистанционно.
3. Качеприводной движитель по п.1, отличающийся тем, что жесткая связь с корпусом, удерживающая крыло на требуемой глубине, выполнена в виде вертикального неподвижного рельса, установленного на оконечность судна, и стойки, неотрывно насаженной на него раздвоенным ребром и сдвигаемой по нему скольжением на нужную высоту с помощью каната бортовой лебедки; внизу стойки укреплено тяговое крыло, половины которого имеют собственные консольные оси колебаний, симметрично прикрепленные к стойке шарнирами так, что эти оси не могут вращаться, но могут складываться "бабочкой" и раскладываться на шарнирах вместе с половинами крыла в состояния «покой» и «работа»; в состоянии «работа» каждая половина крыла способна упруго колебаться на консольной оси, удерживаясь на ней от свободных вращений полосковой пружиной, укрепленной на торцах консольной оси и половины крыла, заканчивающихся в одной плоскости; для перевода крыла из состояния «покой» в состояние «работа», и наоборот, стойку крыла перемещают по неподвижному рельсу и тогда по ней самой перемещается каретка, вставленная неотрывно своим направляющим ребром-рельсом внутрь второго раздвоенного ребра стойки; чтобы такое перемещение возникло, вдоль сердцевины стойки в круговых выемках на поперечных осях и на равных удалениях установлены равновеликие зубчатые колеса, входящие в зацепление одновременно с неподвижным рельсом и рельсом каретки, для чего оба рельса со стороны стойки имеют зубчатую нарезку одинакового с колесами модуля; для складывания половин крыла и придания им необходимой жесткости и прочности каретка соединена с ними симметричными распорками, для чего в местах соединений использованы шарниры; чтобы зафиксировать крыло в рабочем состоянии, стойка опускается канатом вниз под воду, где, дойдя до упора в конце рельса, она отодвигает защелку и защелкивается ею; подав на электромагнит защелки напряжение, ее отводят от стойки и затем поднимают стойку тем же канатом по рельсу из глубины, переводя движитель в состояние «покой».
4. Качеприводной движитель по п.2, отличающийся тем, что жесткая связь, удерживающая тяговое крыло на требуемой глубине, осуществляется по центру оси колебаний и представлена вертикальной стойкой, охватывающей ось с помощью концевой втулки; упругость колебаниям крыла придает полосковая пружина, зажатая неподвижно одним концом в щели упомянутой втулки, а вторым - на крыле с помощью ползуна, сдвигаемого при регулировании упругости пружины по направляющим, проделанным в краях поперечной центральной прорези крыла.
5. Судовой качеприводной движитель по п.2, отличающийся тем, что жесткая связь, удерживающая тяговое крыло на требуемой глубине, осуществляется в двух крайних точках оси упругих колебаний крыла парой вертикальных стоек, жестко прикрепленных в районе оконечности судна (по бортам, скулам или днищу); упругость колебаний крыла обеспечена упругостью его дополнительных связей со стойками, выполненными каждая с помощью рычага, исходящего от крыла вверх вдоль прилегающей стойки и связанного с ней упругим элементом (пружиной).
6. Судовой качеприводной движитель по п.4, отличающийся тем, что стойка, удерживающая крыло на требуемой глубине, укреплена на оконечности судна шарниром с осью поперек диаметральной плоскости с возможностью поворота стойки вперед или назад из вертикально опущенного положения до упора крыла в днище судна или до выхода его на поверхность воды; в качестве неподвижной опоры для подсоединения упругих элементов крыла принята сама ось колебаний, которая обездвижена на конце стойки с помощью зубчатого колеса, зафиксированного на оси по ее центру и сцепленного зубчатой рейкой с таким же колесом, жестко зафиксированным на корпусе судна в шарнире крепления стойки; из-за фиксации стойкой оси крыла его половины отделены друг от друга и способны упруго колебаться на своей стороне оси, для чего каждая половина дополнительно связана с осью полосковой пружиной, укрепленной на торце оси и уложенной вдоль нее в канале крыла, где скреплена с ним ползуном, зажатым в направляющих канала; поскольку удлинители прикреплены к средней основной части крыла шарнирами, крыло приводится в рабочее положение разворачиванием удлинителей на шарнирах, а возвращается в исходное положение их сворачиванием.
7. Качеприводной движитель по п.5, отличающийся тем, что пара стоек, удерживающих тяговое крыло, прикреплена к бортам соосными шарнирами и обеспечена синхронизированным поворотом вперед или назад из опущенного вниз положения до упора крыла в днище судна или до его выхода на поверхность воды вблизи оконечности судна; стабилизированной опорой для упругого удержания крыла на оси колебаний служит сама ось, т.к., несмотря на повороты стоек, остается неподвижной и удерживается от вращения прочно насаженными на ее концы блоками, связанными без скольжения кольцевыми канатами попарно с такими же блоками, зафиксированными прочно на бортах судна в шарнирах крепления стоек; колебания крыла становятся упругими, т.к. кроме подшипников со стабилизированной осью оно связано по центру полосковой пружиной, закрепленной одним концом в горизонтальной щели, вырезанной по диаметру оси поперек нее, а вторым - на крыле с помощью ползуна, сдвигаемого при настройке в центральной поперечной прорези крыла по направляющим, проделанным по ее краям.
8. Судно, отличающееся тем, что использует энергию своей качки для поступательного движения и потому оснащено двумя качеприводными движителями, погружающими тяговые упругоколебательные крылья на глубину ниже расчетной и ниже днища судна на хорду крыла, где волнение водных масс по сравнению с поверхностным может считаться несущественным; для усиления качки судна использованы плоские горизонтальные козырьки, установленные на его оконечностях вблизи ватерлинии, в дополнение к качеприводным движителям установлены обычные винтовые движители, обеспечивающие ход судну в условиях, исключающих применение качеприводных движителей, и участвующие в создании тяги в условиях умеренной качки.
| US 6561856 B1, 13.05.2003 | |||
| ЯХТА | 1992 |
|
RU2031045C1 |
| Волновой движитель для судов | 1978 |
|
SU946396A3 |
| ПРЕДОТВРАЩЕНИЕ СЛУЧАЙНОГО ДОСТУПА, ОСНОВАННОГО НА УСТАРЕВШЕЙ СИСТЕМНОЙ ИНФОРМАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2453075C1 |
| Способ автоматического управления процессом электролитической калибровки | 1957 |
|
SU117340A1 |

