1. Область техники, к которой относится изобретение.
Изобретение затрагивает области техники, связанные с водным транспортом, рыболовством, судостроением, морской энергетикой, охраной морских границ, охраной природы и окружающей среды, освоением шельфов, водными видами спорта, а, также, с расширением среды обитания человека в сторону морей и океанов с ориентацией на создание жилищ, плавающих в море и обеспеченных энергией качки своего корпуса.
2. Уровень техники.
2.1. Использование энергии волн для энергоснабжения и движения судов.
В настоящее время нет судов, реально использующих энергию волн для обеспечения собственного поступательного движения и/или энергоснабжения бортовых потребителей. Известны лишь патенты и свидетельства на изобретения в этой области, реальный спрос на которые по ряду причин пока еще не возник. Среди них:
- гидродинамический движитель для плавательного средства (Lignones Hubert [1]), выполненный в виде тягового колебательного крыла, расположенного на продольной подводной балке, соединяющей шарнирно основной и вспомогательный корпуса судна;
- волновые движители Ю.Ф. Сенькина ([2], [8], [25]), содержащие тяговые колебательные крылья, прикрепленные к корпусу судна так, чтобы при их упругих отклонениях от горизонтали (скошенным волновым потоком) они давали наибольший тяговый эффект;
- судовой движитель (Takashi Harada [3], [21]), выполненный в виде горизонтальной рамы с множеством тяговых колебательных пластин (крыльев), заглубленной под днище судна с помощью пары бортовых стоек;
- пропульсивная (движительная) система для судов (Momot, Adam [4], [20]), содержащая кормовую продольную стрелу с тяговым колебательным крылом, призванным на волнении двигать судно вперед;
- волновое плавниковое движительное устройство (Hiroshi Nobunaga [5]), состоящее из пар носовых и кормовых плавников и датчиков направления обтекающих их потоков, используемых компьютером для оптимальной ориентации плавников;
- гидрокрыло, использующее силу волн для генерации тяги (Tomoyose Riichi [6], [24),
- судовой стабилизатор, генерирующий силу тяги (Matsumwa Shinsuke [7]), утилизируя бортовую качку и волновые потоки по тому же принципу, что и предыдущее крыло;
- пропеллеры (Terao Yutaka [9], [10], [23]), в виде одного или двух крыльев, удерживаемых под днищем судна парами вертикальных стоек, обеспечивающими упругие колебания крыльев, создающих тягу во время качки;
- корабль (Isshiki Hiroshi [11]), с опущенными на время работы за борта с помощью стоек тяговыми крыльями изменяемой кривизны, колеблемые моторами и качкой вертикально;
- морское судно, движимое волнами (Daniel D. DeLima [12]), использующее для создания тяги три группы тяговых крыльев, укрепленных каждая на своей обтекаемой "сигаре", из которых боковые отодвигаются от бортов консолями на необходимые расстояния;
- волновые приводы для ботов (Einar Jakobsen [13] и [14]), содержащие тяговое подводное крыло, удерживаемое на скользящей внутри корпуса колеблющейся вертикальной стойке, используемой, также, для извлечения гидравлической энергии;
- гибкие складывающиеся упругие плавники (J.A.Gause [15]), изгибаясь от волнения и качки создают тягу и применяются как для одиночного корпуса, так и для катамарана и тандема, где плавник устанавливается между корпусами;
- ряд гибких плавников с каждого борта судна (Olav Litsheim [16]) и на днище судна (Karl-Erik F. Jonsson [18]), во время волнения создают тягу;
- носовая и кормовая пара пластинчатых стабилизаторов (Jozef Nawara [17]), кроме стабилизации качки создают тягу за счет их установки на осях и ограничения угловых колебаний вокруг них;
- платформа в виде тримарана (О.А.Hollar [19]), раскачиваемая с боку на бок пассажиром, заставляет тяговые крылья на прикрепленных вблизи параллельно корпусу бортовых гондолах совершать в воде махи и генерировать тягу.
2.2. Анализ причин неудач прежних попыток.
Анализ многочисленных изобретений в области создания судов и иных плавательных средств, двигающихся поступательно за счет энергии волн, показывает наличие у них единой общей ошибки. Она выражается в стремлении предыдущих изобретателей непосредственно использовать для этого разность вертикальных поперечных скоростей тяговых крыльев и обтекающих их водных масс (волновых потоков) ν.
Для крыльев, расположенных на или вблизи корпуса судна, указанные разности малы по сравнению с требуемой скоростью движения судов. Поэтому осциллирующий суммарный вектор скорости встречного потока, воздействующего на тяговое крыло, образует с горизонталью малый меняющийся угол, называемый углом скоса потока ψ. Он определяет возможность генерации тяги упруго удерживаемым в потоке крылом. Для всех рассмотренных выше изобретений на достаточных скоростях хода этот угол очень мал и для коммерческих приложений неприемлем, т.к. создаваемая на этих скоростях тяга также мала.
Для того чтобы создать значительную тягу, крыло должно, во-первых, образовать с набегающим потоком достаточный угол атаки α, определяющий величину нормальной (подъемной) силы, а, во-вторых, - также достаточный угол уклона хорды крыла от горизонта u, определяющий проекцию подъемной силы на горизонталь, собственно, являющуюся тягой. Для этого крыло должно своей хордой занять положение внутри угла скоса потока, так что ψ=u+α. При этом, как известно, создаваемая крылом тяга Т пропорциональна произведению площади крыла S, помноженной на произведение квадрата относительной скорости потока V и синусов образуемых им углов атаки и уклона крыла

Здесь: C и ρ - коэффициент подъемной силы, и плотность воды.
Для получения максимального значения тяги углы атаки крыла α и уклона его хорды u при достаточной мощности качки должны быть примерно равными половине угла скоса потока ψ, т.е. в случае мощной качки наилучший вариант управления крылом дает T=CρV2S sin(ψ/2)2/2). Но даже и в этом оптимальном случае тяга катастрофически падает с повышением скорости хода судна ≈V, движимого энергией волн, т.к. убывает угол скоса потока ψ≈ν/V. Для нормальных скоростей хода получаем T=CρV2S(ν/V)2/8), т.е. T=Cρν2S/8. Вертикальная составляющая скорости водных масс относительно корпуса, где изобретатели размещали свои крыльевые движители, ν меньше, чем скорости частиц воды в волне, т.е. не более 1 м/сек. Таким образом, тяга практически отсутствует. Вот почему за прошедшее столетие так и не нашла свое реальное воплощение заманчивая идея использовать волны для придания судну поступательного движения.
2.3. Пути решения проблем быстрого хода.
2.3.1. Четыре фактора обеспечения быстрого хода.
Изобретение [26] в корне изменило проблемную ситуацию с достижением коммерчески приемлемой скорости хода судна за счет четырех основных факторов.
Во-первых, оно использует для приема энергии волн не крыло, а корпус судна целиком. Это привело к тому, что количество принимаемой энергии от волн многократно возросло за счет того, что активная площадь приемника энергии (площадь сечения корпуса по ватерлинии) в десятки и сотни раз превышает активную площадь крыла.
Во-вторых, кроме динамической составляющей энергии волны, корпус, в отличие от крыла, принимает, также, ее статическую часть в форме неуравновешенных сил гидростатического давления и гравитации.
В-третьих, вся эта энергия, аккумулированная корпусом, подается им на далеко отстоящие от корпуса тяговые крылья в независимые участки водных масс, неассоциированные с корпусом по своим вертикальным осцилляциям.
В-четвертых, вертикальные размахи крыла по правилу рычага становятся до десятка и более раз протяженнее относительных вертикальных колебаний частиц воды на корпусе или в его ближайшей окрестности, где авторы устанавливали свои варианты крылатых движителей. Этот фактор имеет решающее значение, т.к. наконец-то желанный угол скоса потока ψ становится на порядок больше, т.е вполне удовлетворительным.
2.3.2. Общая архитектура выдвижных крылатых движителей.
Таким образом, упруго установленные на осях 6 и 6 тяговые крылья 14 и 9 здесь, в отличие от известных ранее решений, становятся активными, приводимыми в движение качкой судна посредством кильориентированных носовой и кормовой легких и жестких стрел 13 и 10, выдвинутых вдоль киля далеко от оконечностей судна (Фиг.1, 2).
За счет выдвинутости тяговых крыльев от оконечностей судна вперед и назад во время килевой и/или вертикальной качки достигается их активность, связанная со значительным (на порядок) увеличением амплитуды их вертикальных перемещений относительно воды. Особенно это заметно, если длина стрел динамически подстраивается под длину волны так, что взмахи крыльев попадают в противофазу с волновым движением водных масс. Кроме того, мощность, прилагаемая к ним со стороны качающегося судна, как уже было сказано, превышает на 1-2 порядка ту, на которую могут рассчитывать набортные или прилегающие к бортам, днищу или оконечностям судна крылья.
Эксперименты на физических моделях судов-качеходов с парой тяговых крыльев, выставленных вперед и назад вдоль киля с помощью жестких, но очень легких стрел, показывают удивительную способность этих судов проворно продвигаться за счет собственной качки, генерируемой энергией волн. В большинстве случаев модели судов-качеходов развивают высокие скорости, проходя расстояния, равные длине собственного корпуса, за время не более секунды.
Фиг.3а и 3б (вид на суда-качеходы со стороны днища) демонстрируют разные способы крепления выдвижных стрел по горизонтально параллельной схеме, а именно, центрированный и децентрированный. По первому способу во время работы выдвижные несущие стрелы находятся на одной оси, а по второму - они смещены от нее на расстояние e/2. Первый способ точнее держит курс, второй - надежнее и проще в реализации, т.к. не имеют изгиба Б направляющих 16 и 17. Фиг.1-3б показывают, что суда-качеходы могут быть оснащены обычными силовыми установками, используемыми в штиль или в других обстоятельствах, также как и то, что обычные суда могут быть модернизированы в суда-качеходы оснащением их выдвижными крылатыми тяговыми установками.
2.4. Управление судном-качеходом.
Фиг.4 демонстрирует канатную схему выдвижения и уборки передней несущей стрелы 10 в направляющий паз 17. В связи с выдвижением тяговых крыльев с помощью несущих стрел далеко вперед и назад обычный руль может оказаться недостаточно эффективным.
Поэтому во всех проектах суднов-качеходов тяговые крылья обеспечены средством их поворота - рулевой колонкой (фиг.5, 6, 7), разворачивающей крыло на необходимый угол с помощью электрического мотор-редуктора 31, могущего работать под водой. С этой целью (Фиг.4) кабель-канат 15 в месте его соединения с полозом 27 стрелы 10 имеет вывод внутреннего электрического кабеля, герметично соединенного с кабелем, пролегающим по внутреннему каналу стрелы 10 и выведенным на мотор-редуктор 31. На концах крепления кабель-каната 15 к лебедкам 20 и 22, осуществляющим движения стрелы 10, также имеются выводы кабеля, подсоединенные к прибору рулевого управления судном-качеходом.
Управление скоростью хода осуществляется как за счет степени выдвижения кормовой и носовой несущих стрел, так и за счет регулирования жесткости упругого элемента 36. Последняя определяет соотношение, в котором угол скоса ψ делится хордой крыла на углы уклона крыла от горизонтали u и угол его атаки α. Регулирование жесткости пружины 36 выполняется путем сдвига регулирующей колодки прямоугольного сечения 37, удерживающей пружину в скользящем осевом пазу крыла 9. Настройка жесткости пружины производится перед выходом в море или во время дрейфа судна. Очевидно, что дистанционная или автоматическая настройки предпочтительнее, т.к. могут быть выполнены в любое необходимое время.
Маневрирование судном осуществляется поворотами рулевых колонок 7 и 5 (Фиг.1 и др.), расположенных на концах выдвижных стрел 10 и 13 и удерживающих тяговые крылья 9 и 14. Такие виды маневров как торможение и дрейф осуществляются путем установки нейтрали крыла (фантом плоскости покоя) с 0° до 180° и, даже, в большем диапазоне. Резкое уклонение от начального курса может быть выполнено крылом при использовании его (их) в качестве руля. Для этого одновременно производится поворот рулевой колонки на нужный угол закладки руля и завал нейтрали крыла на 90° вниз соответствующим поворотом вал-оси 8, что временно превращает крыло в руль. В этом случае, однако, лучше использовать крыло (Фиг.5, 6, 7) без бокового направляющего козырька 38, какой показан на Фиг.13.
3. Раскрытие изобретения.
3.1. Анализ существующего проекта судна-качехода.
3.1.1. Теория.
Прототипом настоящей разработки взят проект судна-качехода по патенту [26], только что описанный выше в общих чертах. Цель изобретения - кардинально повысить степень извлечения им энергии волн за счет устранения дополнительного ограничения, открывшегося с момента выпуска патента. Таким ограничением являются силы инерции масс, образующих судно. Они возникают во время волнения во всех его точках как реакция масс судна на ускорения качки, которой волны его подвергают. Силы инерции масс, образующих судно, поглощают значительную долю энергии, которую волнение готово, но не может передать судну из-за постоянных трат ее на торможение и повторный разгон масс судна на качке. Попробуйте быстро разогнаться и также быстро остановиться с 30 кг песка в рюкзаке за спиной, и Вы поймете, какую лишнюю работу выполняет волна.
На Фиг.1 показана модель концентрации массы судна М в центре масс А. Потери энергии волн, воспринимаемой корпусом на вертикальной качке от присоединенных к нему масс судна, в предположении, что W(t) - ее скорость в момент времени t, а М - масса судна, составляют:

Предположив, что W(t)=Wosin(φ+ωt), т.е. изменяется по гармоническому закону. Приняв φ=0, а τ=ωt - фазовая координата гармонического процесса вертикальной качки, и взяв выражение для W(t) из (2) получим: E=MWo 2∫sin(τ)cos(τ)dτ. Использовав известное выражение sin(2τ)=2sin(τ)cos(τ) и тот факт, что энергия не имеет направления, т.е. ее траты не могут превратиться в ее же восполнение и должны только нарастать, имеем

или E=MWo 2abs(-cos(x))/4. Количество энергии, потраченное волнением на раскачку судна за четверть периода качки, т.е. за τ=π/4, составит Δ(1/4)=E(π)-E(0)=MWo 2/2 или за половину периода Δ(1/2)=MWo 2. Далее интересуемся инерционными потерями энергии, получаемой от вертикальной качки за полный период:

Если центральный момент инерции судна в диаметральной плоскости (ДП) обозначить как J, то аналогично описанному можно получить результат и для инерционных потерь энергии на осуществление процесса килевой качки:

3.1.2. Примеры.
Пример 1:
Если предположить, что судно имеет водоизмещение (массу) 25000 т, и амплитуда скорости вертикальной качки составляет 1.1 м/сек на волне с периодом 10 сек, то энергия, безвозвратно поглощаемая инерцией за этот период, составляет Δ1=25000000 кг·(1.21 м2/сек2)=30250000 (кгм/сек2)м=30.25 мегаНм = 30.25 мегаДж (1 дж = 1 Нм), что соответствует средней мощности = 3.025 мВт или 4.113 тыс.л.с.
Пример 2:
Предположив, что длина корпуса судна предыдущего примера 150 м, можно оценить мощность, безвозвратно потребляемую инерционной килевой качкой, грубо приняв для расчета, что масса судна (Фиг.1) рассосредоточена от центра равными порциями m=12.5 тыс.т на расстояниях r=50 м. Отсюда примерный момент инерции судна составит J=25000000·2500 кгм2 = 62500000000 кгм2. Допустим, что судно совершает угловые колебания амплитудой до 4° или до 0.0222 радиан. При том же периоде килевой качки средняя угловая скорость ее составит ω=0.02277 1/сек, а максимальная π/2 от средней, т.е. 0.0357 1/сек. Инерция масс угловому ускорению поглощает энергию согласно формуле (5), и она составляет: Δ2=2·62500000000·1.278/1000 кгм2/сек2 = 155.7 мегаДж. Потери же мощности оцениваются с учетом периода качки (10 сек) как 15.57 мВт или 21.17 тыс.л.с.
Всего инерция масс судна (по сумме двух примеров) безвозвратно съедает за 10 сек энергию Δ1+Δ2=185.95 мегаДж при средней мощности 18.59 мВт или 25.3 тыс.л.с.
Пример 3:
В условиях примера 1 средняя скорость вертикальной качки составляет (1.1 м/сек)/1.57=0.7 м/сек. Откуда высота волны составляет 7 м. Энергия, которую такая волна готова тратить на подъем судна на эту высоту, определится как произведение веса судна (25 килотонн · 9.81 м/сек2 = 245.25 мегаН) на высоту волны 7 м, что дает 1710 мегаДж. Таким образом, только вертикальная качка способна развить мощность 171 мВт, т.е. 232.5 тыс. л.с.
3.1.3. Маятниковый способ преодоления инерционного торможения качки.
Одно из возможных решений преодоления инерционных потерь энергии качки, а именно, маятниковое было указано там же [26]. Маятниковое решение (Фиг.8) сводится к тому, чтобы подвесить под килем основную часть массы судна в обтекателе 44, назвав его условно сборником масс, который своим расположением превращает судно в плавающий физический маятник со своим периодом колебаний. Удаляя или приближая его к днищу судна, можно (автоматически) подстроить длину маятника x, чтобы заставить судно-маятник качаться в резонанс с волнением. В результате нежелательные потери энергии волн на торможение и разгон масс, рассредоточенных по судну, исчезнут.
Модели судов-маятников при совпадении периода их колебаний с периодом волны реально показывают прирост скорости хода по сравнению с их упрощенным безмаятниковым вариантом. Однако вместе с этим, у них появляются недостатки, такие как:
- неэффективное распределение масс по судну и усложнение его конструкции,
- дополнительное размещение балластных масс и общее увеличение массы судна,
- проблемы движения по мелкой воде и дополнительное сопротивление ходу судна.
3.2. Исключение инерционности качки для устранения потерь энергии волны.
3.2.1. Концепция.
Мы поняли, что массы судна представляют инерционный поглотитель волновой энергии, которая "съедается" им уже в самом начале ее поступления на корпус, оставляя только некоторую часть для преобразования в форму, пригодную для самохода судна и другого управляемого использования. Идеальное судно, корпус которого полностью располагает энергией, подаваемой на него волнением, представляет собой некий абстрактный теоретический объект - судно, у которого масса изъята, но оставлен прежний вес. Простейшей технической реализацией такого объекта является судно, у которого вся масса сосредоточена в сборнике и подвешена на длинной упругой нити, закрепленной в центре тяжести судна и простирающейся глубоко под воду, где, собственно, сборник масс покоится, натягивая канат. Безинерционные корпус и судно, в этом случае, способны повторять все "кульбиты" волнения без какого-либо инерционного сопротивления, т.к. масса судна из него изъята, а сила тяжести осталась благодаря канату.
Реальные условия, однако, требуют иных технических решений, освобождающих качку корпуса от влияния остальных масс судна. Кроме того, нас интересует максимальное освобождение корпуса от инерции масс не по всем трем угловым и трем линейным степеням свободы, а лишь по 2 из них: одной линейной - по вертикальной оси, и одной угловой - вокруг поперечно-горизонтальной оси. Это соответствует свободному совместному процессу осуществления килевой и вертикальной видов качки. Поэтому будем поэтапно освобождать, вернее, обходить эти виды качки корпуса от инерционного торможения масс судна.
Далее по порядку будут рассмотрены шарнирная и бесшарнирная конструктивные схемы противо-инерционных (ПИ-)механизмов на судах-качеходах. В шарнирной схеме (Фиг.9, 10) в районе миделевого сечения по оси расположены два бортовых шарнира 45, оберегающие подвешенную на них массу от килевой качки. В шарниры входят цапфы качания 48, непосредственно вделанные в платформу 44, “собирающую” массы судна, либо (Фиг.11, 12) в раму вертикальной качки 57, в которой на пружинах сжатия 52 этот платформа покоится.
3.2.2. Качеходы с шарнирным ПИ-механизмом.
3.2.2.1. ПИ-механизм килевой качки.
На фиг.9 и 10 (виды бокового и поперечного разрезов) представлено судно-качеход, которое освобождено от большей части инерционного торможения по килевой качке путем подвешивания грузовой платформы 44 внутри основного корпуса 2 на цапфах (оси) качания 48. Последняя совпадает с или находится близко к центру килевой качки C. Благодаря тому, что центр тяжести G грузовой платформы 44 находится ниже центра C на высоту h, она сохраняет свое устойчивое положение. Требования к минимальному значению величины h определяются, исходя из конкретных условий плавания и размеров судна.
Между платформой 44 и технологической перегородкой 50 в основном корпусе судна должен существовать технологический зазор Z, допускающий свободные относительные угловые качания платформы 44 и корпуса 2 с амплитудой ν, зависящей от предельных параметров волнения и качки.
Судно имеет вспомогательные винтовой движитель 3 и двигатель, используемые при маневрировании в портах и других сложных участках пути. В нормальных условиях при волнении оно использует тяговые крылья 9 и 14, которые удерживаются стрелами 10 и 13, выдвигающиеся во время работы из пеналов 42 и 43 вперед и назад от оконечностей судна. Действуя от качки корпуса 2, мощность которой (не визуальной, а фактической) повышена за счет исключения из килевой качки сопротивления сил инерции, они приводят судно-качеход в движение с повышенной скоростью.
3.2.2.2. ПИ-механизм вертикальной качки.
На фиг.11 и 12 (виды бокового и поперечного разрезов) представлено судно-качеход, которое освобождено от большей части инерционного торможения не только по килевой качке, но и по вертикальной. С этой целью платформа 44 подвешена цапфами килевой качки 48 в шарниры 45 на корпусе 2, но не прямо, а с помощью рамы 57, которая, собственно, и висит на цапфах в корпусе 2. Находясь же внутри рамы, грузовая платформа 44 опирается на пружины 52. Для этого она содержит пружинный карман 55, разделяющий грузовую платформу 44 на две половины, которые должны быть загружены одинаково во избежание его нежелательного перекоса.
Для обеспечения прочности грузовой платформы 44 пружинный карман 55 содержит ребра жесткости 56, кроме того, он несколько уже, чем платформа, что образует в ней направляющий паз 53 для размещения в нем боковых вертикальных стоек рамы 57. Между нижней и верхней перекладинами рамы укреплены круглые направляющие 58, надежно фиксирующие пружины сжатия 52 и гарантирующие плавное скольжение по ним грузовой платформы 44 при вертикальной качке.
В случае чрезмерной качки или по другим обстоятельствам грузовая платформа 44 и корпус судна 2 могут быть арретированы (зафиксированы) друг относительно друга с помощью арретиров 51, укрепленных на оградительных перегородках 50. В этом случае судно поведет себя как обычный качеход.
3.2.3. Качеходы с бесшарнирным 2-пружинным ПИ-механизмом.
Грузовая платформа качеходов с шарнирным ПИ-механизмом разделена пополам центральным карманом 55 с противо-инерционными пружинами 52 (Фиг.11, 12). По этой причине такие качеходы не всегда могут быть использованы для транспортировки большеразмерных грузов (лес, трубы, контейнеры и т.п.). Ниже рассматривается бесшарнирная схема ПИ-механизмом, устраняющая указанный недостаток и открывающая дополнительные возможности утилизации волновой энергии.
Бесшарнирный 2-пружинный ПИ-механизм (Фиг.17, 18) состоит из двух сложных одинаковых пружинных подвесов, на которых покоится грузовая платформа 44, опираясь на них своими торцевыми зубчатыми сегментами 78 через зацепление 75 каждого со своим ползуном 74, имеющего для этого собственную зубчатую нарезку или прикрепленную зубчатую рейку. Ползун 74 двигается возвратно-поступательно в проеме вертикально установленной направляющей стойки 70, имеющей паз 72, не допускающий выпадения ползуна из проема.
Несмотря на то, что грузовая платформа 44 опирается на оба ползуна (носовой и кормовой) и давит на оба своим весом, ни один из них не падает, т.к. оба ползуна своими козырьками опираются, в свою очередь, на пружины 52. Последние остаются всегда на месте благодаря штоку 73, который выполняет также функцию укрепления жесткости направляющей стойки 70, вделанной с той же целью в корпусную перегородку 50.
Боковые перемещения платформы 44 исключаются благодаря тому, что сегменты 78, входя в зацепление с зубчатой рейкой ползуна 74, вместе с ней ограничены от перемещений влево и вправо, скользя своими боковыми поверхностями по левой или правой внутренней лыже 71 направляющей стойки 70.
Во время качки платформа 44 совершает кажущиеся движения, сжимая или разжимая обе пружины 52 синхронно (при вертикальной качке) или асинхронно (при килевой качке). Чем меньше коэффициент жесткости пружины одной и той же силы сопротивления, тем меньшие различия в усилиях по времени будут испытывать на себе пружины, тем эффективнее работа ПИ-механизма.
Разумеется, также, что средний радиус R зубчатого венца сегмента 78 должен равняться половине расстояния между зубчатыми нарезками ползунов 74.
Представленный на Фиг.17 качеход абсолютно симметричен и может одинаково идти в любую сторону, для чего достаточно оба крыла развернуть задней кромкой обратно от желаемого направления хода с помощью механизма поворота его нейтрали (плоскости покоя крыла), как описано ниже.
3.2.4. Движительная и управляющая части качехода с ПИ-механизмом.
Суда-качеходы с ПИ-механизмом, т.е. с безъинерционной качкой заимствуют движительную и управляющую части у обычных судов-качеходов (п/п.2.3 и 2.4). Естественно при этом использовать тяговые крылья с управляемой упругостью колебаний и возможностью дистанционной установки их нейтралей (Фиг.13-16). Все это выполняется в представленной здесь конструкции тягового крыла.
Крыло 9 на подшипниках скольжения 65 удерживается от свободного поворота вокруг оси 8 при помощи пластинчатой пружины 66, вделанной в торцевую щель оси 8. При попытке поворота крыла второй конец пружины 66 удерживает крыло от этого с помощью колодки 37, могущей быть сдвинутой по пружине и по направляющим 61 крыла внутри его полости (Фиг.13). Собственно говоря, колодка 37 является регулятором упругости крыла, с помощью которого она устанавливается на уровень, приемлемый для заданных параметров волнения и загрузки судна-качехода.
Смена нейтрали крыла с горизонтальной ориентации на какую-то иную (требуемую) производится механизмом ее поворота. Механизм поворота расположен в корпусе рулевой колонки 7 и состоит из: оси 8, мертво посаженного на нее зубчатого колеса 64, зубчатой рейки 63 и привода рейки 68. По командам с поста управления судном привод 68 перемещает вверх или вниз рейку, которая с помощью зубчатого колеса 64 ориентирует ось 8 вместе с крылом 9 в нужное угловое положение. Собственно, угловое положение оси 8 и определяет угловое положение нейтрали (плоскость покоя крыла).
3.3. Использование сил инерции для извлечения энергии качки.
3.3.1. Качеход, энергоснабжаемый собственной качкой.
Бесшарнирный ПИ-механизм (Фиг.17, 18) упростил задачу извлечения и преобразования энергии качки (волнения) в ее универсальные формы (механическую, пневмогидравлическую и электрическую), пригодные для применения бортовыми потребителями, включая движительный комплекс.
Фиг.19-21 показывают основные детали системы извлечения и преобразования энергии качки. В ее основе использован бесшарнирный ПИ-механизм, в котором козырек 54 на ползуне 74 заменен цилиндром 79, а шток 73 оснащен поршнем 87 и двумя масляными каналами 80, соединяющими, каждый, соответствующую полость цилиндра 79 и разветвитель 89. Последний обеспечивает соединение полости цилиндра с магистральными трубопроводами высокого 86 и низкого 85 давлений через свою пару клапанов 84, обеспечивающих работу цилиндра в режиме насоса, когда тот в составе ползуна 74 перемещается возвратно-поступательно по штоку во время качки. Собранные вместе только что описанные элементы образуют насосную группу, обозначенную на Фиг.21 номером 49.
Пружины 52, как и прежде, удерживают вес грузовой платформы 44 в нейтральном состоянии, однако, силы инерции платформы 44 здесь приветствуются и задействованы в процессе извлечения из качки накапливаемых видов энергии. При этом качающийся корпус судна 2 и "неподвижная" грузовая платформа 44 действуют, как молот и наковальня, высвобождая энергию, заключенную в противоречии их движений. Действительно, при любой качке корпус 2 толкает вверх или вниз шток 73 и, соответственно, поршень 87 внутри цилиндра 79, удерживаемого неподвижно, насколько можно, платформой 44, сохраняющей покой согласно первому закону Ньютона из-за своей инерционности.
По этой причине масло, находящееся в полостях цилиндров 79, выталкивается из них поочереди в магистраль высокого давления 86, т.к. при сжатии масла в полости цилиндра один клапан 84, соединяющий полость с магистралью низкого давления, запирается, а другой, соединяющий ее с магистралью высокого давления, из-за избытка давления открывается. В смежной полости цилиндра все происходит наоборот, и при том же движении штока 73 и поршня 87 она из-за недостатка давления заполняется маслом, но, не из магистрали высокого 86, а из магистрали низкого давления 85 согласно направленности действия клапанов 84.
Двигатель 82 и компрессор 83 позволяют менять давление внутри гидросистемы, адаптируя ее к разным весам грузовой платформы 44 и мощностям качки (волнения).
Фиг.21 показывает, что часть бортовых потребителей расходует гидравлическую энергию, а часть - электрическую. В данной схеме электрическая энергия генерируется не прямо от качки, а получается как результат преобразования гидравлической энергии с использованием пары "гидромотор - электрогенератор". Последнее обеспечило здесь применение электродвижения, хотя могло быть применено гидродвижение, как в примере (Фиг.25), где для движения судна использован гидромотор 103 с редуктором 104.
3.3.2. Качеход с бесшарнирным 4-пружинным ПИ-механизмом.
Конструкция одного из оконечных узлов бесшарнирного 4-пружинного ПИ-механизма и его применения показаны на Фиг.22-24. Для того, минимизировать остаточные силы инерции, возникающие от взаимодействия корпуса с грузовой платформой через пружину, ее жесткость k должна быть по возможности минимальной, тогда изменение силы сжатия пружины от уже действующего значения силы тяжести G будет также минимальным и составит

где s - величина перемещения ползуна 74 относительно корпуса 2, в сущности, почти равная величине перемещения корпуса 2 во время качки в основании пружины 52, взятой с обратным знаком. Измерения величины перемещения ползуна s фактически для известного значения k характеризуют действие остаточных сил инерции.
Цель минимизации этих сил будет достигнута, если обеспечен минимально возможный коэффициент k. Его величина обратно пропорциональна длине сжатой пружины, значит желательно иметь длинную (высокую пружину). Однако, чтобы не мешать ПИ-механизму взаимодействовать со средствами генерации энергии и, одновременно, избежать перекоса сил, здесь на каждом оконечном узле бесшарнирного ПИ-механизма установлена пара параллельных пружин 52, на которые ползун 74 подвешен через 2-плечую балку 99 в верхней своей части (Фиг.23).
Освободившаяся по центру часть ползуна 74 (Фиг.22) имеет здесь зубчатую нарезку не только со стороны грузовой платформы 44, но и со стороны оконечности судна, т.е. с противоположной своей стороны (69), где входит в зацепление с зубчатым сектором 95, являющимся частью активного крыло-машущего движителя. Его укороченная (по сравнению с обычной) стрела 13 совершает в ритме качки махи под действием возвратно-поступательных колебаний ползуна 74. Для этого вал 96 пропущен через пару крепежных втулок вилки 93, подшипники кармана 97, втулки раздвоенной стрелы 13 и подшипник блока 98, неподвижно связанного с карманом 97. Фиксируя на себе вилку 93 и раздвоенную стрелу 13, вал соединяет их в разноплечий рычаг, который с его же помощью способен качаться в подшипниках кармана 97 и блока 98. Этот составной рычаг приводится в колебательное движение зубчатым сегментом 95 под действием вертикальных колебаний ползуна 74, с которым сцеплен.
Несмотря на то, что длина стрелы составного рычага может быть в два и более раз меньше длины полноразмерной стрелы, рабочий мах крыла 14 на ее конце и его эффективность могут быть больше чем у полноразмерной. Для того, чтобы крыло не потеряло свою эффективность от увеличения величины угловых колебаний укороченной стрелы В, положение нейтральной плоскости крыла поддерживается неизменным (Фиг.24), т.е. преимущественно горизонтальным. Когда вал 96 (вместе со стрелой) качается внутри неподвижного блока 98, тот удерживает неподвижно трос 19, пролегающий внутри реберных каналов стрелы 13 и мертво укрепленный на концевом блоке 21. В результате блок 21 и закрепленный в нем вал 8 удерживают нейтраль неподвижно, несмотря на совершаемые стрелой 13 махи.
3.3.3. Энергоснабжение качехода на базе 4-пружинного ПИ-механизма.
Для энергоснабжения качехода с 4-пружинным ПИ-механизмом в качестве исходной принята схема (Фиг.23), которая и доведена до рассматриваемой схемы (Фиг.25). Трубчатая направляющая (шток) 73 своими нижней и верхней частями заделана в распределители масла 88, укрепленные на перегородке 50 так, что через них устройства по гибким магистралям 85 и 86 обмениваются маслом с другими устройствами, находящимися на (в) платформе 44. Далее внутрь (расширенной в диаметре) пружины 52 помещен цилиндр 79 с поршнем 87, насаженным на шток 73 так же, как показано на Фиг.20.
Отличие новой от ранее описанной схемы (Фиг.20) состоит только в том, что цилиндр 79 здесь прикреплен к консоли 99 с помощью опорной тарелки 77 в верхней своей части, что удлинило пружину 52 и, следовательно, произошло желаемое уменьшение коэффициента ее жесткости k. Цилиндр 79, как и ранее, удерживается неподвижно ползуном 74 через консоли 99, тогда как шток 73 с поршнем внутри цилиндра движется возвратно поступательно корпусом судна 2.
Второе отличие состоит в том, что все механизмы гидросистемы размещены в технологическом отсеке 60 грузовой платформы 44, что снижает инерционное торможение качки оставшимися в корпусе массами. Третье отличие состоит в том, что в качестве движущей силы применена гидроэнергия.
3.3.4. Гибридный качеход.
Энергия качки может быть, естественно, применена не только для "чистых" судов-качеходов. Но, в равной степени, и для обычных судов, особенно для тех, которые вынуждены ходить в суровую и, даже, штормовую погоду. Это суда-спасатели, суда МЧС, спасательные средства, рыбопромысловые и рыболовецкие суда, суда береговой охраны. В обычную безветренную погоду они должны идти своим ходом, а в непогоду и шторм они остро нуждаются в энергетической помощи. В последних двух случаях рыбаки и пограничники получают судно с абсолютно бесшумным движением.
Здесь приведен пример буксира-спасателя (Фиг.29-31). Наряду с обычной силовой установкой буксир оснащен носовым активным качеприводным крылатым движителем (Фиг.31), который может извлекаться из воды. При этом почти все, что не является корпусом встроено в концентратор масс 44, выполненный в виде платформы 119, которая одним концом соединена герметично с корпусом 2 шарниром 122, пропускающим дейдвудную трубу 116, и, следовательно, гребной вал винтового движительного комплекса. Вторым концом платформа 119, концентрирующая массы, опирается на пружину 52 с помощью пружинного пенала 55.
Во время качки корпус 2 и нагруженная платформа 119 совершают относительно друг друга угловые колебания вокруг оси 122, в результате чего зубчатый сектор 78 радиуса R заставляет зубчатый сектор 113 радиуса r совершать угловые колебания с передаточным числом R/r, вызывая махи стрелы 10 активного носового крылатого движителя 9. Отметим, что здесь применен иной механизм стабилизации нейтрали крыла, в основе которого лежит 4-звенный рычажный механизм в виде параллелограмма, сохраняющего параллельность противоположных сторон при изменении угла между смежными сторонами. Это означает (Фиг.29), что рулевая колонка 7 сохраняет свое преимущественно вертикальное положение при качании стрелы 10, т.е. при работе движителя.
Для прекращения действия 1-пружинного ПИ-механизма, представленного здесь, достаточно привести в действие сервопривод 117, которые вставит стержневой стопор в пару отверстий половинок пружинного пенала 55 в момент совпадения их осей. Кроме того, крылатый движитель может быть извлечен из воды по тем или иным причинам с помощью лебедки 20 и каната 19. Для этого (Фиг.30) вначале надо извлечь другой стержневой стопор из соосных отверстий зубчатого 113 и коренного 112 секторов с помощью их фиксатора 114, управляемого дистанционно, в результате чего зубчатый сектор освобождает стрелу 10, обеспечивая ее выемку из воды.
3.4. Разнообразие типов и назначений качеходов.
3.4.1. Спасательный бот.
Спасательный бот представлен на Фиг.26 в состоянии хода, т.к. крыльевые движители выдвинуты в рабочее положение. Платформа здесь - это кабина 44 для экипажа, желающего увеличить ход своего спасательного судна. Кабина подвешена на ленточной пружине 128 в отсеке изоляции Z, допускающем взаимные смещения кабины и отсека. Проемы между ними герметизированы эластичным материалом 97. Спальные отсеки или отсеки для отдыха имеют наружные люки для проникновения в них.
3.4.2. Разведывательное, научно-исследовательское, изыскательское судно.
Изображено на Фиг.27 и Фиг.28. Из первого чертежа видно, что судно находится в положении "дрейф", т.к. тяговые крылья 9 и 14 оба повернуты задней кромкой внутрь. Судно может быть достаточно малым, чтобы не иметь ограничений по району плавания. Построено на базе ПИ-механизма шарнирного типа. Исследовательский и технологический блок находится в грузовом контейнере 44, подвешенном на пружине в пенале 55, качающемся на оси 48. Кроме того, контейнер может легко поворачиваться на собственной горизонтально-поперечной оси, не оказывая сопротивления килевой качке.
4. Краткое описание чертежей и перечень применяемых обозначений.
4.1. Описание чертежей.
Для иллюстрации принятых конструктивных решений, отражающих суть изобретения к его описанию, прилагаются следующие чертежи:
Фиг.1. Судно-качеход простейшего типа с тяговыми крыльями, выдвигаемыми с помощью несущих стрел вперед и назад по ходу судна для обеспечения надлежащей скорости их махов. Вид сбоку. Для анализа вертикальной качки, массу судна M можно рассматривать сосредоточенной в его центре и расположенной близко или совпадающей с центром качания C. При анализе килевой качки массу судна M можно рассматривать в виде двух одинаковых масс m, разнесенных от центра качания C на одинаковые расстояния r так, что момент инерции судна в его диаметральной плоскости составит M·r2. Соответственно, он демпфирует килевую качку, а масса М - вертикальную, оба уменьшая прием волновой энергии.
Фиг.2. Судно-качеход простейшего типа с тяговыми крыльями, выдвигаемыми с помощью несущих стрел вперед и назад по ходу судна. Вид сверху.
Фиг.3а. Судно-качеход простейшего типа (вид снизу) с вынутыми крылатыми движителями и центрированными, но изогнутыми (зона Б) направляющими для уборки несущих стрел.
Фиг.3б. Судно-качеход простейшего типа (вид снизу) с вынутыми крылатыми движителями и ровными смещенными друг от друга на расстояние е направляющими для уборки несущих стрел.
Фиг.4. Тросовый механизм выдвижения стрелы носового крылатого движителя. При намотке кабель-троса 15 на кормовую лебедку 22 кабель-трос задвигает стрелу 10 под днище судна, сматываясь одновременно с носовой лебедки 20.
Фиг.5. Носовой крылатый движитель с поворотной стойкой крыла 7. В разрезе крыла 9 виден центральный проем 41 (Фиг.7), куда входит стойка, удерживая крыло 9 на оси колебаний 8. Допустимые колебания тягового крыла 9 контролируются пружиной 36, выполненной в виде полоски и закрепленной винтами 35 одним концом неподвижно на стойке 7, а другим - в гнезде крыла 9 с помощью регулятора жесткости, выполненного в виде скользящей колодки 37. С помощью сдвига ее в глухом гнезде крыла 9 настраивается жесткость пружины 36 под конкретную нагрузку судна и характер волнения. Жесткость пружины 36 определяет упругость угловых колебаний крыла и возможные значения их углов u1, u2. Кроме того, показан поворотный механизм крыла, состоящий из герметичного двигателя 31, вертикальной оси поворота 32 и зубчатой конической передачи 33.
Фиг.6. Вид спереди на крылатый движитель с отсеченной левой (по ходу движения) частью и коротким вырезом в передней кромке, в котором видна ось колебаний крыла 8.
Фиг.7. Вид сверху на крылатый движитель, показанный на Фиг.5 и 6.
Фиг.8. Судно-качеход, преодолевающий на пути получения полноценной качки инерционное сопротивление собственной массы за счет маятниковой схемы, получаемой сосредоточением основных масс внутри обтекаемой гондолы 44, жестко подвешенной к килевой балке в районе миделя. Здесь x - длина физического маятника. Выдвижные стрелы движителей втянуты внутрь вертикально параллельных каналов 42 и 43.
Фиг.9. Вид сбоку на судно-качеход, обладающее способностью безъинерционной килевой качки. Безинерционность по килевой качке достигнута за счет выключения инерционных масс из процесса килевой качки, конкретно, за счет подвешивания грузового отсека 42 на ось 45. Конструкция названа ПИ-механизмом. Ось расположена в центре или близко к центру килевого качания судна c. Вместо грузового отсека может использоваться рама, платформа или грузовое шасси, наполненное грузами, сохраняющими в нем свою форму и положение. Полученное образование называется грузовой платформой судна 44. Между грузовой платформой и остальной (корпусной) частью судна, обеспечивающей его плавучесть, образован зазор Z, гарантирующий свободу их относительных угловых перемещений.
Фиг.10. Вид на судно-качеход в сечении АА, намеченном на Фиг.9. Судно относится к категории гибридных. Превращается в чистую категорию качеходов удалением винтового движителя.
Фиг.11. Вид на судно-качеход в диаметральной плоскости. Данный качеход освобожден от инерционности не только по килевой качке, но и, - по вертикальной качке и, даже, частично, по продольной качке, т.к. ось подвеса 48 грузового отсека 44 находится выше центра килевой качки c. Это также повышает эффективность крылатого движителя. На внутренней переборке корпуса 50 показаны условно арретиры 51, предназначенные для фиксации в корпусе положения грузового отсека 44. При их накачивании арретиры раздуваются к центру и зажимают грузовой отсек, ограничивая тем самым его движения.
Фиг.12. Вид в миделевом сечении на судно-качеход, показанный на Фиг.11. Виден пружинный карман 55, подвешенный на трех вертикальных направляющих шестах 54, соединенных общим основании качающейся рамы 57, с его помощью в раме удерживаются пружины 52, несущие грузовую платформу (грузовой отсек) 44, изолирующую инерцию масс от процесса вертикальной качки.
Фиг.13. Разрез реверсивного крылатого движителя в плоскости крыла 9. В обе стороны крыла заделаны упругие полоски 66, действующие как пружины кручения. Один конец каждой из них удерживается в щели неподвижной опорной оси-вала 8, а второй - в сквозном отверстии вкладыша 37 (регулятора жесткости пружины). Вкладыш сдвигается по длине пружины 66 от оси-вала 8 через щель 62 (Фиг.14) на расстоянии, оптимальном для упругого удержания вкладышем колебаний крыла 9 относительно опорной оси-вала 8. Положение покоя крыла 9 (нейтраль) определяется угловым положением оси-вала 8. Именно в него пружина 66 пытается вернуть крыло 9 при его силовом отклонении.
Неподвижность опорной оси-вала 8 внутри вертикальной стойки 7 сохраняется на крейсерском ходу судна. Но во время маневров вертикальной зубчатой рейкой 63 с помощью колеса 64 ось-вал 8 может быть повернута на - 90° при торможении, и на - 180° - при реверсе тяги, необходимом для заднего хода (оба крыла) или дрейфа судна (любое одно крыло).
Фиг.14. Разрез реверсивного крыла в сечении CC, намеченном на Фиг.13. Видна щель 62 для доступа к скользящей колодке 37, установкой которой регулируется жесткость пружины 66 и, соответственно, жесткость колебаний крыла 9 на оси 8.
Фиг.15. Вид реверсивного крылатого движителя сбоку. Внутри стойки 7 виден привод 68 рейки 63, разворачивающей опорную ось 8 с помощью зубчатого колеса 64 на - 180°.
Фиг.16. Вид сбоку на реверсивный крылатый движитель во время торможения.
Фиг.17. Вид на судно-качеход с бесшарнирным ПИ-механизмом, удерживающим грузовой отсек 44, подвешенным с помощью зубчатой пары «сектор-рейка» на носовой и кормовой пружинах 52 так, что в диаметральной плоскости внешний корпус судна может качаться как вертикально, так и угловато относительно грузового отсека, удерживаемого в покое собственной массой (желательно более 90% судового водоизмещения).
Фиг.18. Диаметральный разрез конструкции оконечного узла бесшарнирного ПИ-механизма, с помощью пружинного подвеса которого мягко удерживается грузовой отсек 44. Зубчатая пара 78×74 «сектор-рейка» допускает вместе с вертикальной качкой передавать на пружину 52 также и килевую качку корпуса судна, снимая тем самым с него инерционное сопротивление масс судна, сосредоточенных в основном в грузовом отсеке - платформе 44. Кроме этого, отдача пружины 52 при распрямлении такова, что ускоряет корпус вслед за уходящей волной с ускорением выше, чем у водных масс, т.е. выше ускорения свободного падения. Это исключает холостой ход крылатого движителя при опускании корпуса вслед за уходящей волной, присутствующий при жесткой связи корпуса с массой судна.
Фиг.19. Механогидравлический преобразователь энергии качки. Трансформирует ее в пневмогидравлическую энергию гидросистемы, питающей все судовые потребители энергии, в том числе преобразователи и движитель. Разрез выполнен по сечению АА, намеченному на Фиг.20. Он показывает: вертикальный линейно подвижный блок, состоящий из гидроцилиндра 79 и зубчатой нарезки 75; корпусной перегородки 50 с вваренной в нее направляющей стойкой 70; торцевой стенкой 76 грузового отсека, сваренной с зубчатым сектором 78, передающим качания ползуну 74.
Фиг.20. Механогидравлический преобразователь энергии качки, трансформирующий ее в пневмогидравлическую энергию гидросистемы. Состоит из гидроцилиндра 79, возвратно поступательные движения штока 73 и поршня 87 внутри которого заставляют масло втекать и вытекать (под давлением) из его полостей по каналам 80 в верхний и нижний маслораспределительные блоки 88. Блоки содержат по паре односторонне запорных клапанов 84 для выталкивания масла, соответственно направлению движения поршня 87 в цилиндре 79, из сжимаемой полости цилиндра в магистраль высокого давления 86 и всасывающих масло в расширяемую полость цилиндра из магистрали низкого давления 85.
Фиг.21. Схема дальнейших преобразований пневмогидравлической энергии в электрическую, пригодную для бортовых потребителей (включая движительный комплекс) и накапливаемую аккумуляторами на случай отсутствия качки. Схема показывает, что энергия качки запасается в удобное время, даже во время стоянки или дрейфа судна, и обеспечивает ему ход не только во время, когда она происходит, но, также, в ее отсутствие за счет использования аккумуляторов. Кроме того, при использовании качки как источника энергии, допустимы любые типы движителей, включая широко распространенные и отлично отработанные винтовые. Использование на начальном этапе механогидравлического преобразователя энергии качки (Фиг.20) предполагает, также, возможность ее прямого применения для привода гребного вала с помощью гидромотора, либо после преобразования ее в электрическую - с помощью электромотора (как показано).
Фиг.22. Крылатый рычажный движительный комплекс, использующий качку корпуса для размахивания длинной частью (вылетом) рычажной стрелы посредством силового воздействия на ее короткую сегментную зубчатую часть с помощью входящего с ней в зацепление двустороннего зубчатого ползуна 74, движущегося возвратно поступательно. Последний с помощью приваренной к нему сверху поперечной 2-плечевой консольной балки 99 передает вес платформы на пару боковых пружин 52, а силы инерции - на зубчатый сегмент маховой стрелы 13, несущей тяговое крыло 14. Силовое взаимодействие корпуса и грузовой платформы через короткое плечо стрелы производит широкие амплитудные махи стрелы и, соответственно, тягового крыла, что и требуется.
Фиг.23. Сечение по АА крылатого рычажного движительного комплекса, показанного на Фиг.22 сверху, а здесь - в сечении по АА, намеченном на Фиг.22.
Фиг.24. Вид сбоку крылатого рычажного движительного комплекса, показанного на Фиг.22 и 23. Поясняет механизм удержания нейтрали крыла 14 через ось-вал 6 в неизменном угловом положении. Задача сводится к удержанию оси-вала 6 в положении, одинаковом с положением сидящего (скользко) на валу 96 блока 98, неподвижного относительно внешнего корпуса 2. Синхронизация положений валов при размахиваемой стреле 13 происходит благодаря блочно-канатной (или зубчато-ременной) нескользящей связи между равновеликими блоками 98 и 21.
Фиг.25. Гидравлическая энергосистема, приводимая в действие качкой корпуса судна, подавляющая часть массы которого отделена от корпуса 47 и сосредоточена в платформе 44, взаимодействующей с наружным корпусом через пружинно-гидравлический механизм, извлекающий и преобразующий энергию качки в пневмогидравлическую форму для питания гидравлического движительного комплекса и другими потребителями.
Фиг.26. Прогулочный катер-качеход с кабиной 44, являющейся грузовой платформой и подвешенной в основном корпусе с помощью ленточной пружины-рессоры 128. Сервисные помещения: кухня, спальня, др. во время движения не используются с целью повышения эффективности движительного комплекса.
Фиг.27 и 28. Виды сбоку и спереди на научно-изыскательское, разведывательное или военное морское кибер-судно неограниченного района плавания, управляемое и опрашиваемое по радио. Ось 48 освобождает внешний корпус судна от сил инерции, обеспечивая максимальный прием им энергии килевой качки, тогда как достаточно длинная пружина внутри телескопической подвески 55, гарантирующая малый коэффициент жесткости, обеспечивает максимум приема энергии от вертикальной качки.
Фиг.29. Передняя часть механизма удержания рулевой колонки 7 в вертикальном положении, гарантирующем наибольшую эффективность применения движителя с машущим крылом при повышенных углах махов несущей стрелы 10 (дополнительно к конструкции, показанной на Фиг.24).
Фиг.30. Носовая часть механизма удержания рулевой колонки 7 в вертикальном положении, основанного на применении рычажной схемы в форме параллелограмма, сохраняющего свои стороны параллельными при управлении одним из его 4-х углов. Параллелограмм образуют две равные противоположные пары звеньев: вертикальная стойка (между осями 108 и 109 на Фиг.29), удерживающая рулевую колонку, и носовая часть корпуса (между осями 109 и 111 на Фиг.30), а также, стрела 10 (между осями 108 и 111) и тяга 110 (между осями 109 и 109).
Фиг.31. Спасательный буксир-качеход с односторонней носовой Пи-подвеской, обеспечивающей подвижное взаимодействие корпуса 2 с грузовой платформой 44 лишь наполовину, а именно, в их носовых частях, где оно материализуется во время качки в форму махов носового тягового крыла 9. В кормовой же части грузовая платформа 119 и корпус 2 соединены, но шарнирно с помощью соосных полуосей 122, что обеспечивает свободу относительных перемещений носовых частей, преобразуемых в силу тяги. Благодаря наличию дизеля к месту штормового бедствия судно всегда доберется даже в штиль, подняв свой крыльевой движитель с помощью троса 19, для этой операции надо снять фиксатор 114 между малым и большим (зубчатым) секторами (Фиг.30). По месту же штормового бедствия наличие такого крылатого движителя оказывается как нельзя кстати в силу огромной мощности, развиваемой им во время шторма.
4.3. Буквенные обозначения.
WL - ватерлиния.
ν - угловая амплитуда относительных качаний корпуса и платформы.
u - амплитуда уклонов (угловых колебаний) крыла.
C - центр килевого качания.
r - радиус инерции судна в ДП.
L1, L2, L - плечи качания несущих стрел.
Z - зазор для относительных перемещений корпуса и платформы.
G - вес судна или, с грубым приближением, грузовой платформы.
М - масса судна.
m - половина массы судна.
В - угловой размах вынужденных колебаний крыла.
е - относительное смещение несущих стрел по горизонтали.
h - расстояние между центром качания и центром тяжести.
5. Осуществление изобретения и технический результат.
Осуществление изобретения зависит от достигаемого изобретением технического результата, который состоит в экономии (до 100%) топлива судами-качеходами, у которых основная масса изолирована от качки корпуса, и, поэтому, не потребляет его энергию, полностью используемую в этом случае на питание потребителей и движение судна.
Для современного состояния развития науки и техники производственной базы судостроения и машиностроения нет никаких особых технологических трудностей для единичного, серийного или/и массового производства судов принципиально нового класса. Развернув производство качеходов в государственных масштабах, наша страна сделала бы серьезный шаг в экономике в сторону ухода ее от сырьевой зависимости.
Более того, производство качеходов оборонного назначения просто необходимо, т.к. наконец-то снимет вопрос о постоянной нехватке горючего для несения кораблями вахты как в прибрежной полосе, так и в различных районах мировой акватории. Кроме того, эффективность сторожевых кораблей-качеходов выше обычных во много раз благодаря тому, что такие сторожевики бесшумны и за их поведением гидроакустикой не уследить.
Изложенное говорит о том, что развитию производства и использованию качеходов в широких масштабах нужна государственная поддержка и помощь, возможно, программа.
6. Библиография.
[1] Lignones Hubert. Hydrodynamic motor device for floating body. October, 20, 1989. PUB-NU: FR 2630082 A1.
[2] Ю.Ф.Сенькин. Волновой движитель судна. Авторское свидетельство №
SU 3971501/27-11, кл. В63Н 1/36, 04.11.85.
[3] Takashi Harada. Ship propelling device. Japan Pat-NU: 63-149289 (A), 22.6.1988, Int. class B63H 19/02.
[4] Momot Adam. A propulsion system for a water borne vessel. Europe Pat-NU: 0252733, 13.01.88, Int. class B63H 19/02, B63H 1/36.
[5] Hiroshi Nobunaga. Wave force fin propelling device. Japan Patent # 62-43395 (A), 25.2.1987, Int. class B63H 19/02, B63B 39/06.
[6] Tomoyose Riichi. Hydrofoil for generating propulsion utilizing wave force. Japan PUB-NU: 60-033193, 20.02.1985, Int. class: B63H 19/02, B63B 1/24.
[7] Matsumura Shinsuke. Vessel stabilizer having construction to obtain propulsion force. Japan PUB-NU: 61-085296. 30.04.1986, Int. class B63H 19/02, B63B 39/06.
[8] Ю.Ф.Сенькин. Судовой волновой движитель. Авторское свидетельство №
SU 3628538/27-11, 04.08.83, кл. B63H 19/02.
[9] Terao Yutaka. Propeller. Japan PUB NU: 58-133997, 01.02.1982, Int. class B63H 19/02, B63H 1/36.
[10] Terao Yutaka. Thrust generating device. Japan PUB NU: 58-030893, 23.02.1983, Int. class B63H 19/02.
[11] Isshiki Hiroshi. Ship. Japan PUB-NU 56-124591, 30.09.1981, Int. class B63H 19/02.
[12] Daniel D. Delima. Wave-propelled marine vessel. US Pat-NU: 4.648.350, Aug.4, 1987, Int. class B63H 19/02.
[13] Einar Jakobsen. Wave motor, especially for propulsion of boats. US Pat-NU: 4.371.347, Feb.1, 1983, Int. class B63H 19/02.
[14] Einar Jakobsen. Wave motors. US Pat-NU: 4.332.571, Jun.1, 1982, Int. class B63H 1/30, B63H 5/00.
[15] J.A.Gause. Water-borne vessel, comprising propulsion system incorporating flexible fin propulsion members. US Pat-NU: 3.453.981, July 8, 1969.
[16] Olav Litsheim. Ship propelling means. US Pat-NU: 3.312.186, April 4, 1967.
[17] J. Nawara. Ship stabilizers. US Pat-NU: 3.004.510, Aug. 13, 1958.
[18] Karl-Erik A. Jonsson. Device for propelling and stabilizing of boats. US Pat-NU: 2.996.034, April 10, 1959.
[19] O.A.Hollar. Watercraft with pivoted flappers. US Pat-NU: 2.520.804, Dec.24, 1947.
[20] S.Kalfas. Boats and means for propelling boats. US Pat-NU: 2.048.339, March 4, 1935.
[21] M.C.White. Aquatic device. US Pat-NU: 1.315.267, Sept. 9, 1919.
[22] B.F.Jackson. Self propelling boat. US Pat-NU: 1.304.318, May 20, 1919.
[23] Daniel Vrooman. Vibrating propeller. US Pat-NU: 22.097, Nov.16, 1858.
[24] Matsui Isao. Propulsion device for marine vessel by waves. Japan PUB-NU: 11-255191, 21.09.1999, Int. class B63H 19/02.
[25] Ю.Ф.Сенькин и др. Судовой волновой движитель. Авторское свидетельство №
SU 4466706/11, 19.08.92, кл. B63H 19/02.
[26] V.V.Gorshkov. Rocking ship propulsion and the rocking propelled ship.US Pat-NU: 6.099.368, Aug.8, 2000, Int. class B63H 19/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| СУДНО, ИСПОЛЬЗУЮЩЕЕ ЭНЕРГИЮ КАЧКИ КОРПУСА | 2011 |
|
RU2472669C1 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ТУРБОДИНАМИЧЕСКОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2128597C1 |
Изобретение относится к водному транспорту, в частности к судам, использующим энергию качки для обеспечения собственного поступательного движения и/или снабжения бортовых потребителей. Судно, движимое энергией качки внешнего корпуса, содержит корпус, содержимое которого отделено и встроено в платформу, упруго установленную в полости корпуса. Относительно платформы корпус в пределах, дозволенных пружинами, может качаться волнами в диаметральной плоскости диаметрально и килем. В качестве движителей применены тяговые упруго-колебательные крылья, выдвигаемые из носа и кормы по линии киля с помощью жестких несущих стрел. Повышается степень извлечения энергии волн за счет уменьшения силы инерции судна при качке. 4 н. и 1 з.п. ф-лы, 32 ил.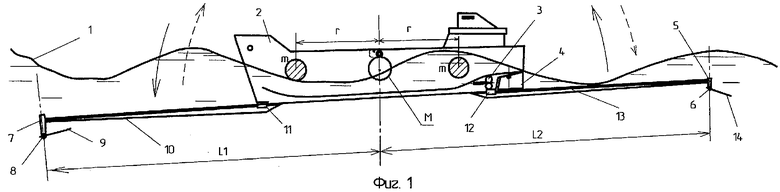
1. Судно, движимое энергией качки внешнего корпуса, изолированного от инерции своего содержимого отделением и встраиванием его в платформу, упруго установленную в полости корпуса так, что оказавшись изолированным от сил инерции платформы относительно нее корпус в пределах, дозволенных пружинами, может свободно качаться волнами в диаметральной плоскости вертикально и килем, в качестве движителей применены тяговые упруго-колебательные крылья, выдвигаемые от носа и кормы по линии киля с помощью легких, прочных и жестких несущих стрел, на качке по закону рычага махи их концов, несущих крылья, по амплитуде и скорости превышают махи оконечностей судна.
2. Судно по п.1, отличающееся тем, что оснащено штатной движительной силовой установкой и несет на борту запас топлива.
3. Судно, движимое энергией качки внешнего корпуса, изолированного от инерции своего содержимого отделением и встраиванием его в платформу, упруго установленную в полости корпуса так, что оказавшись изолированным от сил инерции платформы относительно нее корпус в пределах, дозволенных пружинами, может свободно качаться волнами в диаметральной плоскости вертикально и килем, в качестве движителей применены тяговые упруго-колебательные крылья, удаленные от носа и кормы по линии киля на концах легких и прочных несущих стрел; причем стрелы, установленные по схеме рычага на герметичные шарнирные опоры в оконечностях корпуса, своими короткими плечами находятся внутри корпуса, где с помощью своего торцевого зубчатого сектора каждая стрела входит в зацепление с зубчатым ползуном, движимым синхронно качке торцевым зубчатым сектором платформы по направляющей стойке, при этом ось упругих колебаний крыла, фиксирующая пружину колебаний крыла, стабилизирована относительно корпуса.
4. Судно, движимое энергией качки внешнего корпуса, изолированного от инерции своего содержимого отделением и встраиванием его в платформу, упруго установленную в полости корпуса так, что оказавшись изолированным от сил инерции платформы относительно нее корпус в пределах, дозволенных пружинами, может свободно качаться волнами в диаметральной плоскости вертикально и килем, при этом энергия качки превращается в гидравлическую энергию установленными между корпусом и платформой гидронасосами, частично преобразовывается в электроэнергию, запасаемую в аккумуляторах, далее энергия в обеих формах используется для питания судовых потребителей, включая привод винтовых движителей.
5. Судно, движимое штатным движителем и качкой внешнего корпуса, изолированного от инерции своего содержимого отделением и встраиванием его в платформу, установленную упруго в носовой и шарнирно - в кормовой части корпуса, в пределах, дозволенных пружиной, он свободно качается вокруг шарнира, придавая тяговому упруго-колебательному крылу энергию качки посредством легкой жесткой стрелы, удерживающей крыло своим концом и размахивающей им в диаметральной плоскости, будучи сама раскачиваема корпусом через носовой герметичный шарнир и платформой, удерживающей торец стрелы зубчатым сектором, ось колебаний тягового крыла стабилизирована относительно корпуса, а само крыло со стрелой может быть поднято из воды.
| Судно | 1984 |
|
SU1273298A1 |
| Волноход Тарасова | 1980 |
|
SU962097A1 |
| US 6099368 A, 08.08.2000 | |||
| DE 3425426 A, 16.01.1986. | |||

