Изобретение относится к вертолетам с одним несущим винтом. Известны вертолеты с хвостовым винтом, недостатком которых является излишне длинная хвостовая балка, необходимая для выноса хвостового винта из зоны вращения несущего. См. а.с. №244895.
Вариант 1. Сущность изобретения в том, что диск вращения хвостового винта пересекает диск вращения несущего винта /см. фиг.1-3/, для чего передаточное отношение "А" редукции между ними /выраженное как число оборотов хвостового винта за один оборот несущего, или иначе - как соотношение частот хвостового и несущего винтов/, деленное на число лопастей несущего винта N, должно быть целым числом "с" или целым числом плюс-минус дробь: единица, деленная на число лопастей хвостового винта n.
То есть к моменту подхода середины ширины очередной несущей лопасти к втулке хвостового винта последний должен сделать полное число оборотов или полное число оборотов плюс-минус сектор, равный угловому расстоянию между соседними лопастями хвостового винта. Тогда хвостовой винт при подходе середины ширины каждой лопасти несущего винта будет занимать одинаковое положение. И лопасть несущего винта может проходить между двумя проходами лопастей хвостового винта.
Для этого их надо предварительно позиционировать, то есть выставить хвостовой винт в такое положение, чтобы в момент прохода несущей лопасти лопасти хвостового винта были равноудалены от нее. Так как лопасть несущего винта гибкая и закреплена подвижно, то она может отклоняться в определенном секторе. Поэтому для гарантированного прохождения несущей лопасти она должна сужаться к концу, то есть конец лопасти имеет треугольную или трапециевидную форму.
Вертолет почти обязательно должен иметь двухлопастный или однолопастный хвостовой винт, хотя в подварианте на фиг.1 возможен и трехлопастный.
Наличие небольшой стреловидности несущей лопасти облегчает указанную синхронизацию, если верхняя часть хвостового винта вращается от несущего /по потоку/, а несущий вращается против часовой стрелки /на виде сверху/, и наоборот.
Вариант 2. Если двух или даже трех лопастей недостаточно, а увеличение диаметра хвостового винта нежелательно, то вертолет может иметь два хвостовых винта на одном валу, причем достаточно, если управляемым будет только один из них. Возможны подварианты: два винта по одну сторону хвостовой балки или по обе ее стороны /см. фиг.5/. При этом винты должны иметь сдвиг по фазе, по времени равный времени прохождения несущей лопастью расстояния между двумя винтами, или иначе говоря - в "А" раз больше, чем угловое расстояние между двумя винтами относительно центра несущего винта. То есть к тому моменту, когда несущая лопасть, пройдя один винт, подойдет ко второму, он должен также занять положение, удобное для прохода несущей лопасти. На практике это означает, что винты позиционируются "по месту".
Вариант 3. Два хвостовых винта могут быть расположены на двух противоположно вращающихся соосных валах одного редуктора, причем опять же винты могут быть по одну сторону хвостовой балки или по разные. /также см. фиг.5/. Также достаточно, чтобы регулируемым был только один из них. Винты позиционируются.
Вариант 4. Два или более хвостовых винта могут быть расположены на одной хвостовой балке и продольно ей, причем винты могут вращаться в разных плоскостях с перекрытием их дисков /см. фиг.4/. Опять же достаточно, чтобы регулируемым был только один из них.
Этот вариант менее желателен, так как второй винт оказывается ближе к несущему, и создаваемый им компенсационный момент меньше.
Вариант 5. Хвостовой винт, расположенный на короткой хвостовой балке, вызывает увеличенные потери мощности на компенсацию реактивного момента. Чтобы компенсировать эту потерю, предлагается установить диск вращения хвоствого винта под углом атаки к продольной вертикальной плоскости вертолета /фиг.6/. В этом случае он в режиме крейсерской скорости работает практически в режиме авторотации, не потрбляя мощности, хотя и создавая дополнительное сопротивление. При такой конструкции вертолет хорошо сохраняет способность к поступательному движению и к посадке "по-самолетному" в случае отказа привода хвостового винта.
Вариант 6. Еще более укоротить фюзеляж вертолета можно, разместив винты, компенсирующие реактивный момент несущего винта, по бокам фюзеляжа на крылообразных пилонах /см фиг.7/. Потери мощности на компенсацию при этом возрастают, ширина вертолета тоже, зато вертолет приобретает новое качество - он практически становится конвертопланом, так как в полете переходит на режим автожира. То есть в скоростном полете, постепенно увеличивая тягу обоих боковых винтов вперед, на них передается вся мощность, а несущий винт вращается в режиме авторотации, не потребляя мощности.
Оба винта должны быть регулируемыми, причем один - с реверсом. Желательно, чтобы они вращались в разные стороны.
При такой схеме боковые винты также будут пересекать диск вращения несущего винта /или придется поднимать его на пилоне, что увеличит вес и лобовое сопротивление вертолета/. Поэтому передаточное отношение редукции подбирается по вышеприведенной формуле (как для одного винта, а второму задается сдвиг по фазе). То есть на практике - оба винта позиционируются.
Возможно сочетание варианта 6 с вариантами 2, 3 или 4. В этом случае четыре боковых винта желательно расположить попарно симметрично относительно центра несущего винта, то есть Х-образно. Формула редукции считается как для одного винта, а остальным задается сдвиг по фазе, то есть винты позиционируются. Все четыре винта должны быть регулируемыми. Их лопасти должны иметь крутку.
На фиг.1-7 изображены варианты предлагаемого вертолета, где 1 - фюзеляж, 2 - несущий винт, 3 - хвостовой винт /винты/, 4 - боковые винты.
Пример рассчета редукции: допустим вертолет имеет трехлопастный несущий винт и двухлопастный хвостовой винт. По упомянутой формуле получаем, что "А" может принимать значения, кратные 1,5, то есть 1,5-3,0-4,5-6-7,5-9 и т.п.
Работает вертолет как обычный, но каждая лопасть несущего винта проходит мимо втулки хвоствого или бокового винта между проходами лопастей последнего.
Вариант вертолета на фиг.7 работает так: при висении винт /винты/ с одного бока создает тягу вперед, а с другого - назад. После взлета автоматом перекоса задается отрицательный тангаж и вертолет набирает скорость. По мере ее роста шаг боковых винтов постепенно увеличивают в направлении "вперед" вплоть до передачи на них всей мощности /если они на нее рассчитаны/. Несущий винт, не отсоединяясь от трансмиссии, работает в режиме авторотации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2007 |
|
RU2351505C2 |
| СПАСАТЕЛЬНЫЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2006 |
|
RU2335432C2 |
| ЭКРАНОХОД СТАРОВЕРОВА | 2008 |
|
RU2379214C2 |
| ТРЕХМОТОРНЫЙ ГЕЛИПЛАН | 2011 |
|
RU2460671C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2701083C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2701076C1 |
| Боевой комплекс | 2017 |
|
RU2659178C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2710839C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2698497C1 |
Изобретение относится к области авиации, более конкретно - к вертолетам с одним несущим винтом. Короткий вертолет содержит несущий винт и систему компенсации его реактивного момента. Диск вращения несущего винта пересекается диском /дисками/ вращения компенсирующего винта /винтов/. Передаточное отношение редукции между дискам, выраженное как отношение частот компенсирующего и несущего винтов, удовлетворяет соотношению:
где А - передаточное отношение, N - число лопастей несущего винта, n - число лопастей компенсирующего винта /винтов/, С - целое число. Диск вращения хвостового винта может быть расположен под углом к продольной вертикальной плоскости вертолета. Вертолет может иметь более двух компенсирующих винтов по бокам. Изобретение направлено на уменьшение длины хвостовой балки вертолета. 3 н. и 4 з.п. ф-лы, 7 ил.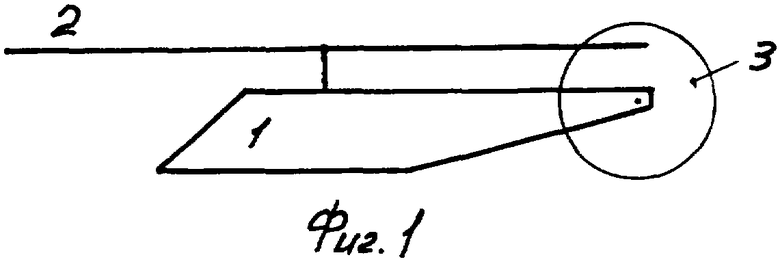
1. Короткий вертолет, включающий несущий винт и систему компенсации его реактивного момента, отличающийся тем, что диск вращения несущего винта пересекается диском (дисками) вращения компенсирующего винта (винтов), а передаточное отношение редукции между ними, выраженное как отношение частот компенсирующего и несущего винтов, удовлетворяет соотношению
где А - передаточное отношение, N - число лопастей несущего винта, n - число лопастей компенсирующего винта (винтов), c - целое число.
2. Вертолет по п.1, отличающийся тем, что конец лопасти несущего винта сужается, например имеет треугольную или трапециевидную форму.
3. Вертолет по п.1, отличающийся тем, что имеет два компенсирующих винта на одном валу, расположенных по одну или по обе стороны хвостовой балки, причем достаточно, чтобы регулируемым был только один из них.
4. Вертолет по п.1, отличающийся тем, что имеет два соосных компенсирующих винта, вращающихся в разные стороны и расположенных по одну или по обе стороны хвостовой балки, причем достаточно, чтобы регулируемым был только один из них.
5. Вертолет по п.1, отличающийся тем, что имеет два или более хвостовых винтов, расположенных на хвостовой балке последовательно ей в одной или в разных плоскостях, причем достаточно, чтобы регулируемым был только один из них.
6. Короткий вертолет, включающий несущий и хвостовой винты, отличающийся тем, что диск вращения хвостового винта расположен под углом к продольной вертикальной плоскости вертолета.
7. Короткий вертолет, включающий несущий винт и систему компенсации его реактивного момента, отличающийся тем, что имеет более двух компенсирующих винтов по бокам вертолета.
| Svoboda Vaclav «VERTULNIKY», «NASE VOJSKO», PRAHA, 1979, стр.193, 230 | |||
| Лопасть несущего винта | 1967 |
|
SU244895A1 |
| ФЛЮГЕРНЫЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВОДЯНОГО ПОТОКА | 1934 |
|
SU41701A1 |
| Устройство для нагрева магнитоуправляемой дугой | 1983 |
|
SU1152741A1 |

