Известны вертолеты разных схем, однако для них характерны: малый статический потолок, достаточно высокие требования к посадочной площадке, сильный шум и вибрация в салоне (см. а.с. 244895).
Изобретение относится к соосным вертолетам с преимущественными назначениями: медицинский, спасательный, десантный, вертолет-кран.
Для вертолетов с такими спецификациями должны быть характерны:
а) хорошая работа в режиме висения и большой статический потолок; б) возможность посадки на необорудованную площадку в стесненных условиях; в) малый уровень шума и вибраций в салоне для медицинского.
Для решения этой триединой задачи предлагаются три следующих технических решения:
Решение «А». При работе вертолетов с одним или двумя соосными несущими винтами одинакового диаметра тяга создается в основном концами лопастей (прикорневые 50 % лопасти создают только 6 % тяги). Поэтому ближе к втулке несущего винта создается достойная зона или даже зона обратных завихрений, что ухудшает работу концевых частей лопасти и, возможно, ухудшает точность управления вертолетом.
Для повышения эффективности работы винта предлагаемый вертолет имеет два или более (реально - не более трех) соосных несущих винта разного диаметра, вращающихся с разными угловыми скоростями, но с примерно одинаковой линейной скоростью на конце лопасти (фиг.1).
При этом самый большой винт вращается в одну сторону, а средний и малый - в другую (чтобы уравновесить реактивные моменты). Желательно также, чтобы все винты или хотя бы средний из трех имели разное число лопастей, например большой - 5, средний - 4, малый - 3 или 2-3-2, или 3-2-3. Это уменьшит вибрации лопастей от их взаимного влияния.
Для управления полетом достаточно, чтобы управляемым был только один из винтов, например нижний (если только он не малый), а остальные могут быть винтами с изменяемым шагом или даже простыми винтами постоянного шага. Или один из них - изменяемого шага, а малый - постоянного шага. Большой, средний и малый винты могут быть расположены в разной последовательности по высоте, например верхний - большой, посередине - малый, нижний - средний.
Управление поворотом вертолета осуществляется изменением соотношения шагов большого и среднего винтов или одновременным изменением «газа» и шага единственного управляемого винта (например, уменьшение шага с одновременным повышением газа).
Решение «Б». Иногда вертолет не может сесть в стесненных условиях из-за опасности задеть винтом склон или скалу при случайном порыве ветра.
Для защиты винта вертолета при подлете к склону, скале предлагаемый вертолет имеет хвостовую балку достаточной прочности и длины, поднимающуюся под полетное положение лопастей (фиг.1). На конце балке имеется надувная эластичная пневмокамера для смягчения возможных касаний. Примерное усилие необходимого гидроцилиндра - 900 кг /9000 Н/.
Чтобы во время кратковременной посадки лопасти не провисли и не ударили по балке, управление тягой при поднятой балке блокируется по минимальному значению (например, не ниже 50 % сухого веса).
Чтобы при поднятии балки не произошло заметного нарушения развесовки, шарнир балки должен быть расположен выше оси балки, возможно даже вне ее контура - вынесен вверх. В этом случае перемещение центра тяжести балки будет почти вертикальным.
Для уменьшения веса балка может иметь ферменную конструкцию без обшивки или иметь тканевую, или пленочную обшивку из современных высокопрочных и высокомодульных материалов. Например, «Вектран-2000».
Так как для защиты винта вертолет должен подлетать к склону задом, то на вертолете должны иметься две или более телекамеры, попарно направленные в одну сторону с поперечным расстоянием (базой) между ними (стереотелекамера). А в распоряжении летчика должны быть стереомониторы в виде очков или нашлемного опускаемого прибора.
Чтобы облегчить летчику управление в режиме стреотеленаблюдения назад, вертолет имеет в системе управления переключатели «вперед-назад» и «вправо-влево», меняющее местами направления указанных воздействий. Если система электродистанционная, то переключатели электрические, меняющие местами положительный и отрицательный сигналы рассогласования между положениями органов управления и автомата перекоса (фиг.2). Если система механическая, то в цепи управления продольным перемещением вертолета и в цепи управления боковым скольжением вертолета (в каждой) должно быть звено с вращательной передачей движения, в котором должен быть реверс-редуктор, переключаемый двумя фрикционными муфтами (фиг.3).
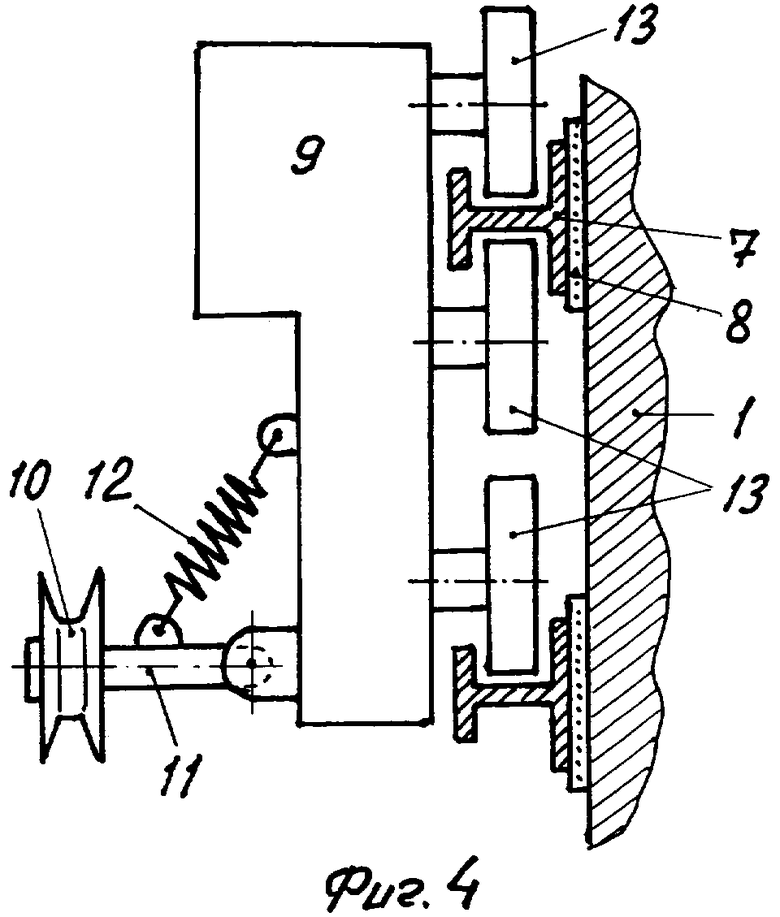
Для снятия пострадавшего с вертикальной скалы на боковой поверхности фюзележа и балки могут иметься два электрически изолированных от корпуса рельса, по которым от двери до конца балки движется тележка со шкивом на подпружиненной или снабженной предохранительным разрушаемым креплением (штифтом) поворотной оси (фиг.4). С помощью этой тележки можно подвести канат со спасательным оборудованием вплотную к скале.
Управляется тележка изменением полярности напряжения на рельсах. Возможно изолированное крепление только одного рельса, но это потребует отдельного источника электропитания, например трансформатора.
Рельсы и тележка не рассчитаны на восприятие веса человека, поэтому имеют малый очень малый вес и простую конструкцию.
Модификация вертолета для равнинной местности может иметь обычный хвостовой обтекатель меньшей длины.
Решение «В». В предлагаемом вертолете двигатель с редуктором и винтами расположен в отдельной гондоле над фюзеляжом и крепится к нему на одном или нескольких пилонах (фиг.1). Это сделано, во-первых, для того, чтобы поднять несущие винты для облегчения посадки на кустарник или на склон (шасси для посадки на склон описано в отдельном изобретении «Шасси»). А во-вторых, для снижения шума и вибраций в салоне. Для лучшего гашения шума и вибраций пилоны могут быть изготовлены из композитного материала и прикреплены к фюзеляжу и мотогондоле через эластичные вставки.
Для управления двигателем и автоматом перекоса целесообразно применить электродистанционную систему управления.
Предлагаемый вертолет примерно на 10 % дороже обычного и не будет обладать высокой скоростью, зато будет иметь повышенную, взлетную массу, большой статический и динамический потолок и сможет (при наличии упомянутого «Шасси») принять пострадавшего или раненого в местах, не доступных другим вертолетам. Или доставить в это место груз.
На фиг.1, изображен предлагаемый вертолет, где: 1 - фюзеляж, 2 - мотогондола на пилонах 3, 4 - несущие винты разного диаметра, 5 - хвостовая балка (пунктиром - в поднятом положении) с пневмокамерой 6 на конце.
На фиг.2 и 3 изображены варианты электрического и механического переключателей «вперед-назад» и «вправо-влево», где: АП - датчик положения автомата переноса, ОУ - датчик положения органов управления, БС - блок сравнения, ± - сигнал рассогласования, П - переключатель, ИМ - исполнительный механизм, РРФУ - реверс-редуктор с фрикционным управлением.
На фиг.4 изображены рельсы 7 на обшивке вертолета 1, установленные на диэлектрических прокладках 8, и тележка 9 со шкивом 10 на оси 11, подпружиненной пружиной 12. Тележка движется на колесиках 13.
Работает вертолет на фиг.1 так: большой винт вращается в одну сторону, средний и малый - в другую. Диаметры, окружная скорость и число лопастей подобраны так, чтобы суммарный реактивный момент был равен нулю. Рекомендуемые соотношения диаметров 1-0,618-0,382. Если управляемый винт - средний, соотношение может быть изменено в сторону его увеличения.
Схема на фиг.2 работает так: сигналы от датчиков АП и ОУ сравниваются в блоке сравнения БС и с усилением передаются через переключатель П исполнительному механизму ИМ. Переключение переключателя вызовет изменение реакции управления, например при движении ручки вперед вертолет начнет двигаться назад.
Механическое управление на фиг.3 работает так: при нормальной работе поворот входного вала в одну сторону приводит к вращению выходного вала в ту же сторону (прямая передача вращения). При переключении двух фрикционных муфт передача вращения идет через зубчатые колеса и реверсируется, и реакция управления становится обратной.
Тележка на фиг.4 работает так: постоянное напряжение той или иной полярности подается на изолированные рельсы 7 и через электрически изолированные колесики 13 поступает на электродвигатель (расположен внутри, не показан), который вращает колесики в ту или иную сторону.
Тележка отклоняет спасательный канат к концу хвостовой балки и затем возвращает его обратно. При превышении допустимого усилия ось 11 отклоняется вниз или вниз-вперед, канат соскакивает со шкива 10 и вес нагрузки воспринимается лебедкой.
Ожидаемые результаты: получение вертолета с недостижимыми ранее посадочными способностями, особенно в сочетании с шасси, изготовленным согласно отдельному изобретению «ШАССИ (варианты).»
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРОТКИЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2006 |
|
RU2356795C2 |
| ТРЕХМОТОРНЫЙ ГЕЛИПЛАН | 2011 |
|
RU2460671C1 |
| МНОГОВИНТОВОЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2007 |
|
RU2351505C2 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2698141C1 |

Изобретение относится к авиации. Спасательный вертолет включает фюзеляж (1) и соосные винты (4), причем винтов может быть два или более и они могут быть разного диаметра. По меньшей мере один из винтов - управляемый с изменяемым шагом, а остальные - с фиксированным шагом. Во втором варианте вертолет имеет хвостовую балку (5) с эластичной пневмокамерой (6) на конце, причем при поднятой балке блокируется снижение тяги. В третьем варианте двигатель и редуктор размещены в отдельной мотогондоле (2), расположенной над фюзеляжем на пилонах и/или эластичных вставках. Изобретение повышает эффективность работы несущего винта. 3 н. и 2 з.п. ф-лы, 4 ил.
| РУЧНАЯ ТЕЛЕЖКА С ПОДНИМАЮЩЕЙСЯ ПАРАЛЛЕЛЬНО САМОЙ СЕБЕ ПЛАТФОРМОЙ | 1934 |
|
SU42809A1 |
| СИСТЕМА СПАСЕНИЯ ЛЮДЕЙ ВЕРТОЛЕТОМ | 2004 |
|
RU2268764C1 |
| ПРИБОР ДЛЯ ДЕЛЕНИЯ ОТРЕЗКА ПРЯМОЙ | 1933 |
|
SU37350A1 |
| Устройство для защиты гибкого кабеля | 1971 |
|
SU898513A1 |
| Устройство для комплектования деталей подшипников | 1976 |
|
SU590514A1 |

