Изобретение относится к промысловой геофизике, а именно к способам контроля пространственного положения долота бурового инструмента в скважине в процессе бурения.
Известен инклинометрический способ определения местоположения забоя скважины, заключающийся в регистрации электрических сигналов, уровень которых пропорционален величинам зенитного и азимутального углов скважины и которые передаются на поверхность земли по проводному каналу связи.
Недостатком известного способа является низкая производительность буровых работ из-за необходимости периодической остановки процесса
бурения для определения местоположения долота.
Известен также способ определения местоположения забоя скважины, являющийся наиболее близким к предлагаемому изобретению, который заключается в расположении на дневной поверхности вокруг устья скважины как минимум двух сейсмоприемников, затем регистрации этими сейсмоприемниками , времени прихода прямой волны, возникающей в момент резонанса, наступающего при равенстве частот вынужденных колебаний, вызванных работой долота бурового инструме-(та, и собственных колебаний низа бурильной колонны, возникающих из-за произвольосо
00 00
о ел
31
ного изменения нагрузки на буровой инструмент.
Недостатком прототипа является сложность осуществления способа и невозможность непрерывной регистрации вследствие необходимости периодического (дискретного) измерения времени распространения колебаний от долота до сейсмоприемников.
Целью изобретения является обеспечение непрерывности контроля искривления скважины и упрощение способа.
Согласно предлагаемому способу определения местоположения забоя скважины, заключающемуся в расположении вокруг устья скважины на дневной поверхности или под зоной малых скоростей как минимум двух основных сейсмоприемников, затем регистрации этими сёйсмоприемниками поступающих от долота акустических сигналов и определении при помощи этих сигналов пространственных координат долота в забое. Регистрацию осуществляют по трем пространственным компонентам при равенстве частоты поступающих от долота акустических сигналов резонансной частоте сейсмоприемников, а определение пространственных координат долота в забое производят путем нахождения точки пересечения как минимум двух условных прямых линий, параметры которых находят на основании данных о местопожении сейсмоприемников и результато регистрации акустических сигналов.
Цель .кроме того, достигается тем,ч равенство частоты поступающих от до лота акустических сигналов резонансной частоты основных сейсмоприемник осуществляют экстремальным регулированием скорости вращения долота в забое по максимуму выходного сигнала дополнительного сейсмоприемни- ка, который до начала регистрации устанавливают на устье скважины и при этом настраивают его резонансну частоту на резонансную частоту осноных сейсмоприемников.
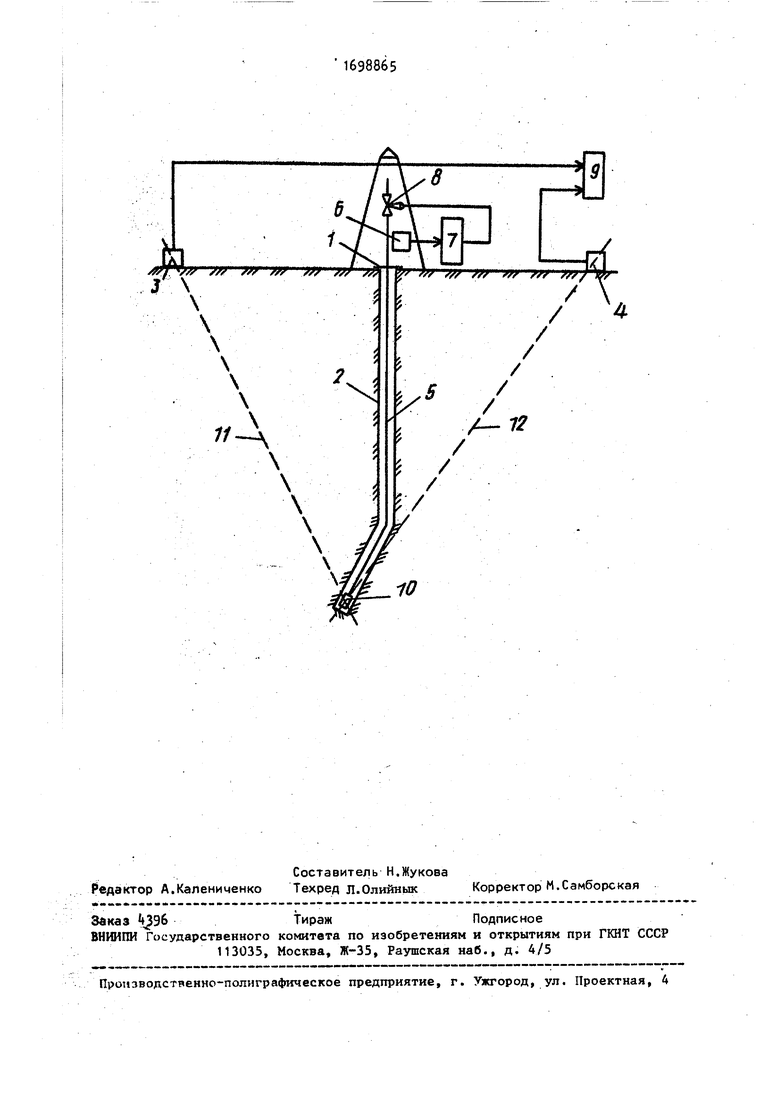
На чертеже показана функциональн схема осуществления способа определния местоположения долота бурового инструмента в скважине. Способ осуществляют следующим об разом.
Вокруг устья 1 скважины 2 на задном расстоянии от этого устья распо
0
5
0
5
п
.
лагают как минимум два трехкомпонент- ных основных сейсмоприемника 3 и k так, чтобы их соответствующие компоненты имели одинаковую ориентацию в пространстве. Кроме того, в устье 1, например, на колонне 5 устанавливают дополнительный (однокомпонент- ный) сейсмоприемник 6. При этом, предварительно на стенде все основные сейсмоприемники 3 и k и дополнительный сейсмоприемник 6 настраивают так, чтобы они имели одинаковую собственную частоту. Выход установленного на устье 1 сейсмоприемника. 6 соединяют с входом экстремального регулятора 7, выход которого соединяют с управляющим входом регулирующего клапана 8, установленного на колонне 5 подачи жидкости в скважину 2. Выходы основных сейсмоприемников 3 и 4 соединяют с входами вычислительного устройства 9.
В процессе бурения долото 10 вырабатывает акустический сигнал некоторой частоты, который с одной стороны достигает основных сейсмоприемников 3 и +, а с другой, распространяясь по бурильной колонне 5 и по движущейся в этой колонне жидкости, достигает устья 1 скважины, где до- пол ни т ель ньТм сейсмоприемником 6 он преобразуется в электрический сигнал. При этом выходной сигнал сейсмоприемника 6 поступает на экстремальный регулятор 7. Последний, воздействуя на регулирующий клапан 8, осуществляет экстремальное управление давлением жидкости в бурильной колонне 5 и скоростью вращения долота 10. Экстремальное управление заключается в обеспечении оптимального статического режима работы объекта. При этом основным критерием оптимальнос- с ти является обеспечение минимума или максимума заданной Функции качества работы объекта при недостаточной априорной информации о характере ее изменений.
Экстремальный регулятор 7 осуществляет поиск максимума амплитудно-частотной характеристики по чувствительности. При этом регулятор 7 формирует на клапан 8 управляющий сигнал по результатам измерения крутизны амплитудно-частотной характеристики дополнительного сейсмоприемника 6 в каждой конкретной точке этой характеристики. Если пер0
5
0
вая производная амплитудно-частотной характеристики А f(tt) по частоте Q положительна, то для достижения максимума регулятор 7 посредством клапана 8 увеличивает давление жидкости, соответственно, скорость вращения долота 10 и частоту вырабатываемого этим долотом акустического сигнала. При переходе через максимум производная меняет свой знак. Таким образом, минимализируя абсолютную величину первой производной от амплитуды выходного сигнала сейсмоприемника 6 по частоте, регулятор 7 поддерживает давление жидкости в бурильной колонне 5 таким, что амплитуда А выходного сигнала сейсмоприемника является максимальной, что автоматически обеспечивает равенство частоты колебаний, вызванных вращением долота 10, резонансной частоте сейсмоприемника 6. Поскольку у всех сейсмоприемников резонансная частота установлена одинаковой, то это обусловливает постоянное поддержание равенства поступающих от долота 10 акустических CHI- налов резонансной частоте основных сейсмоприемников 3 и kt что также значительно повышает чувствительност и помехозащищенность регистрации.
В зависимости от направления прихода акустического сигнала датчик каждой компоненты основного сейсмоприемника вырабатывает собственную - ЭЛС индукции, пропорциональную проекции амплитуды колебаний на пространственные компоненты X, Y и Z. Измеренные значения проекций передают на вычислительное устройство 9, с помощью которого определяют векторну сумму этих проекций. Кроме того, в вычислительное устройство Э дополнительно закладывают информацию о положении сейсмоприемников в выбранной системе координат.
Таким образом, вычислительное устройство Э по каждому основному сей- смоприемнику 3 и Ц в каждый момент времени располагает информацией о координатах места расположения сейсмоприемника и о проекциях амплитуды колебаний, вызванных работой долота 10, на пространственные компоненты X, Y и Z этого сейсмоприемника.Этой информации достаточно для определения параметров условной прямой линии 11 или 12, проходящей через точку
ь
т ю
10
20
6988656
расположения сейсмоприемника 3 или 4 и точку расположения долота 10 бурильного инструмента. При этом вычислительное устройство 9 производит определение координат точки пересечения условных прямых линий 11 и 12, которые одновременно являются координатами места расположения долота 10 бурильного инструмента. Вычислительное устройство 9 также производит определение для каждой координаты места расположения долота 10 производной по времени, что дает информацию и о 15 направлении бурения в каждый момент времени. Формула изобретения
1. Способ определения местоположения забоя скважины, заключающийся в размещении вокруг устья скважины не менее двух основных сейсмоприемников, регистрации сейсмоприемниками поступающих от долота акустических сигналов и определении по результатам регистрации пространственных координат забоя скважины, отличающийся тем, что, с целью обеспечения непрерывности контроля искривления скважины и упрощения способа, упомянутую регистрацию осуществляют по трем пространственным компонентам при равенстве частоты 4 поступающих от долота акустических сигналов . резонансной частоте сейсмоприемников, а опоеделение пространственных коорди зг долота в забое производят путем нахождения точек пересечения как минимум двух прямых линий, параметры оторых находят по данным о местоположении сейсмоприемников и результатам указанной регистрации акустических сигналов.
25
30
35
40
2. Способ поп.1, от л и ч a tout и и с я тем, что до начала регист-, рации на устье скважины устанавливают дополнительный сейсмоприемник с резонансной частотой, совпадающей с
резонансной частотой основных сейсмоприемников, при этом для обеспечения равенства частоты поступающих от долота акустических сигналов резонансной частоте осньвных сейсмоприемникое выполняют экстремальное регулирование скорости вращения долота на забое по максимальному значению выходного сигнала дополнительного сейсмоприемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположениязАбОя СКВАжиНы | 1979 |
|
SU840777A1 |
| Система для автоматического управления режимами бурения скважин | 1974 |
|
SU727841A1 |
| СПОСОБ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ДОЛОТА В ПРОЦЕССЕ БУРЕНИЯ | 2006 |
|
RU2305298C1 |
| СПОСОБ ОБРАЩЕННОГО ВЕРТИКАЛЬНОГО СЕЙСМИЧЕСКОГО ПРОФИЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2450292C2 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ ДЛЯ ПРЯМОГО ПРОГНОЗА НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 1997 |
|
RU2117317C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ | 2007 |
|
RU2357078C2 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 1996 |
|
RU2101733C1 |
| СПОСОБ АЗИМУТАЛЬНОЙ АКУСТИЧЕСКОЙ КОРРЕКЦИИ ИНКЛИНОМЕТРА | 2015 |
|
RU2619563C2 |
| Способ скважинной сейсморазведки | 1981 |
|
SU1035549A1 |
| СПОСОБ ТУРБИННОГО БУРЕНИЯ, УСТРОЙСТВО ДЛЯ БУРЕНИЯ СКВАЖИН И ТУРБИНА ТУРБОБУРА (ЕЕ ВАРИАНТЫ) | 1992 |
|
RU2032063C1 |
Изобретение относится к промысловой геофизике, а именно к способам контроля пространственного положения долота бурового инструмента в скважине в процессе бурения. Целью изобретения является обеспечение непрерывности контроля искривления скважины и упрощение способа. Цель изобретения достигается за счет регистрации акустииеских сигналов от долота трехкомпонентными сейсмопри- емниками, расположенными вокруг устья скважины, при равенстве частоты излучаемых сигналов резонансной часто,- те сейсмоприемников. При этом выполняют экстремальное регулирование скорости вращения долота по максимуму выходного сигнала дополнительного сейсмоприемника, установленного на устье скважины. 1 з.п. ф-лы, 1 ил. ё 1В
| Способ определения местоположения бурового инструмента и его ориентирование в обсадной колонне | 1983 |
|
SU1129333A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ определения местоположениязАбОя СКВАжиНы | 1979 |
|
SU840777A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
