ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Данное изобретение относится, в общем, к системам с шаговыми двигателями и касается, в частности, усовершенствованной схемы для привода шагового двигателя и способа управления этой схемой и приводом.
Системы с шаговыми двигателями и приводы таких двигателей известны в данной области техники. Обычные системы с шаговыми двигателями содержат шаговый двигатель и привод двигателя, при этом типичный привод двигателя содержит схему Н-моста. Фиг.1 поясняет выполнение обычной схемы 10 электропривода шагового двигателя.
Аналоговый сигнал напряжения подается в преобразователь 12 "напряжение - коэффициент заполнения", который синхронизируется тактовым генератором 14. Выходной сигнал преобразователя 12 затем подается на первый вход 18 первой схемы И 20 и на первый вход 22 второй схемы И 24. Сигнал фазы подается на соответствующие вторые входы 26, 28 первой и второй схем И 20, 24. Сигнал фазы, поступающий на второй вход 26, сначала проходит через инвертор 30. Выходной сигнал первой схемы И 20 затем подается на вход 32 первой половины 34 Н-моста, а выходной сигнал второй схемы И 24 подается на вход 36 второй половины 38 Н-моста. Соответствующие выходные сигналы половин 34, 38 Н-моста питают обмотки 40 двигателя.
Обычная схема 10 работает, изменяя ток в обмотках 40 двигателя путем активного выбора поочередных токов обмоток, одного за другим, по синусоидальному закону, чтобы управлять двигателем с помощью последовательности дискретных микрошагов. В любой данный момент выбранным током обмотки активно управляет отдельная интегральная схема (не показана). Интегральная схема динамически обеспечивает необходимый ток обмотки, используя управление с замкнутым контуром и обратную связь по току обмотки двигателя. Таким образом, обычные схемы привода шагового двигателя являются в общем системами с обратной связью в отношении того, как они подключены к шаговому двигателю. Такие обычные схемы обладают несколькими недостатками в работе.
Одним из недостатков, имеющих место в обычной схеме 10, является шум. При некоторых значениях микрошага дискретный характер широтно-импульсной модуляции (ШИМ) вызывает возрастание слышимых субгармоник генератора 14. Неточная подстройка частоты генератора вызывает нежелательное слышимое дрожание частоты, или "свист". Кроме того, длинные провода в цепи обратной связи, подключенные к обмоткам шагового двигателя, вызывают нежелательный электрический шум "звона", который также может быть слышимым.
Другой недостаток, имеющий место в схеме 10, возникает, когда переключается управление фазой. В идеальном случае фаза должна переключаться, когда ток через обмотки 40 двигателя равен нулю. Однако при типичных рабочих скоростях двигателя всегда имеется по меньшей мере некоторая конечная величина тока, протекающего через обмотки 40, вследствие индуктивной природы этих обмоток. Переключение полярности тока, когда ток в действительности не равен нулю, заставляет вал двигателя (не показан) вращаться неравномерно. Неравномерное вращение приводит к увеличенным вибрациям в двигателе, что еще более увеличивает создаваемый слышимый шум.
Еще один недостаток, имеющий место в схеме 10, проистекает из того факта, что Н-мосты имеют "мертвую зону", когда напряжение, питающее обмотки 40 двигателя, переходит через нулевой уровень. Мертвая зона вызывает заметные и нежелательные паузы в движении двигателя при низких скоростях вращения вала. Пауза приводит к толчкообразному вращению вала двигателя, что делает трудным или даже невозможным точное позиционирование вала двигателя в районе мертвой зоны. Переходы через мертвые зоны также еще более увеличивают создаваемый шум, испытываемый двигателем.
Пример способа уменьшения шума шагового двигателя описан в патенте США №5440214. В этом патенте описывается электропривод с широтно-импульсной модуляцией (ШИМ) напряжения, который, используя синхронизацию ШИМ, генерирует синусоидальный сигнал питания, аппроксимирующий синусоиду с использованием дискретных уровней. Прямое линейное кодирование каждого шага синхронизации ШИМ осуществляется в центральном процессоре (CPU), чтобы генерировать аппроксимирующий импульс ШИМ, соответствующий необходимому синусоидальному сигналу. Используется одна скорость привода для бесшумной работы и система с обратной связью для динамического измерения характеристик и управления шаговым двигателем.
Дискретный односкоростной способ работы, описанный в этом патенте, хотя и полезен для балансирования коэффициента заполнения сигнала ШИМ, не способен обеспечить компенсацию для различных или переменных рабочих скоростей привода. Этот способ не способен также обеспечить компенсацию аномалий мертвой зоны в пределах шага привода и поэтому не позволяет точно позиционировать двигатель при низких скоростях привода, когда действие инерции системы слабее и поэтому не способно маскировать аномалии мертвой зоны.
Другая схема привода шагового двигателя описана в патенте США №5977737. Используется схема привода в виде Н-моста, управляемая с помощью системы с обратной связью, которая использует предсказываемое значение тока двигателя. Предсказываемый ток двигателя рассчитывается на основе полученных опытным путем характеристик самого двигателя и измеряемых значений угловой скорости двигателя и физического угла. Подобно патенту США №5440214 здесь также требуются динамические измерения некоторых переменных в системе с обратной связью, что может создавать нежелательный шум.
Соответственно, желательно сконструировать схему привода для системы с шаговым двигателем, которая уменьшает рабочий шум двигателя, а также устраняет проблемы, связанные с обратной связью, аномалиями мертвой зоны и переключением сигналов с ограниченным током. Схема должна работать в непрерывном диапазоне скоростей вращения вала двигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеперечисленные цели достигаются в предложенной схеме привода для системы с шаговым двигателем. Основные преимущества этой схемы включают разомкнутую систему управления и схему переключения, которая может обеспечить как инвертирование фазы ШИМ, так и защиту от потери ШИМ посредством аппаратных средств самой схемы. Способ управления двигателем дополнительно корректирует существенные аномалии, испытываемые обычными системами электропривода.
Более конкретно, данное изобретение предлагает схему привода для шагового двигателя, которая использует процессор, формирующий на выходе сигнал ШИМ. Схема привода содержит схему Н-моста, имеющую первый и второй входы, и схему переключения, имеющую вход и выход. Первый вход Н-моста и вход схемы переключения подключены к выходу сигнала ШИМ процессора, а выход схемы переключения подключен ко второму входу Н-моста. Схема переключения инвертирует коэффициент заполнения сигнала ШИМ, когда сигнал ШИМ присутствует, и не инвертирует коэффициент заполнения, когда сигнал ШИМ отсутствует.
В другой форме осуществления изобретения предусматривается система с шаговым двигателем, которая содержит шаговый двигатель, схему привода двигателя для питания шагового двигателя, схему переключения и процессор. Схема привода двигателя имеет первый и второй входы управления, а схема переключения имеет вход и выход. Вход схемы переключения подключен к первому входу управления, а выход схемы переключения подключен ко второму входу управления. Процессор подает сигнал ШИМ на первый вход управления и вход схемы переключения, и схема переключения функционирует как инвертирующая схема, когда присутствует сигнал ШИМ, и как буферная схема для схемы привода двигателя, когда сигнал ШИМ отсутствует.
В еще одной форме осуществления изобретения предлагается способ управления шаговым двигателем, имеющим схему привода двигателя. Согласно этому способу предсказывается угловое ускорение вращающегося вала двигателя и вычисляется угловое положение вала на основе предсказанного ускорения вала. Затем текущее значение отклонения рассчитанного положения вала предсказывается на основании рассчитанного положения вала. Скорость вращения вала двигателя также вычисляется на основании предсказанного ускорения вала, и предсказанное текущее значение отклонения затем подстраивается на основании вычисленной скорости вращения вала. Подстроенное значение отклонения корректируется с учетом аномалии пересечения нулевого уровня и затем подается на схему привода двигателя.
При нормальных нагрузках двигателя и стандартных скоростях данное изобретение особенно эффективно для устранения шума работающего двигателя, также позволяя двигателю работать плавно в непрерывном диапазоне рабочих скоростей.
ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
На фиг.1 показана принципиальная схема обычного привода.
На фиг.2 показана блок-схема системы с шаговым двигателем согласно одной из форм осуществления данного изобретения.
На фиг.3 показана принципиальная схема схемы переключения, изображенной на фиг.2.
На фиг.4 показана блок-схема способа вычисления значения ШИМ согласно другой форме осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Обратимся теперь к фиг.2 и 3. Система с шаговым двигателем подходящего для использования в данном изобретении типа в целом обозначена как 50 и содержит шаговый двигатель 52 и привод 54 двигателя для управления шаговым двигателем. Шаговый двигатель 52 предпочтительно является двухфазным двигателем, а привод 54 двигателя - предпочтительно схемой Н-моста, которая известна в данной области техники. Привод 54 двигателя содержит отдельные первый и второй приводы 56 и 58 соответственно для питания обоих соответствующих концов обмотки 60 двухфазного двигателя 52. Управляющий сигнал напряжения с ШИМ подается непосредственно от центрального процессора 62 управления приводом на вход 64 первого привода 56 привода 54 двигателя, как лучше всего видно на фиг.3.
Тот же самый сигнал ШИМ подается также непосредственно от центрального процессора 62 на вход 66 схемы 68 переключения. Схема 68 переключения предпочтительно содержит в качестве своих основных компонентов логическую схему 70 исключающее ИЛИ и схему 72 накачки заряда (схему с переключаемыми конденсаторами). Первый вход 74 схемы 70 исключающее ИЛИ подключен непосредственно к входу 66 схемы переключения, таким образом на него также подается сигнал ШИМ. Первый вход 74 схемы 70 исключающее ИЛИ подключен ко второму входу 76 схемы исключающее ИЛИ через последовательное соединение входного конденсатора 78 и первого регулирующего диода 80; оба этих компонента являются частями схемы 72 накачки заряда. Остальная часть схемы 72 накачки заряда предпочтительно содержит второй регулирующий диод 82, включенный между землей и точкой соединения первого входного конденсатора 78 с первым регулирующим диодом 80, а также выходной конденсатор 84 и стабилизирующий нагрузочный резистор 86; оба этих компонента включены в параллель между вторым входом 76 схемы исключающее ИЛИ и землей. Выход 88 схемы исключающее ИЛИ предпочтительно подключен непосредственно к входу 90 второго привода 58.
Программа управления приводом для управления приводом 54 двигателя и схемой 68 переключения исполняется центральным процессором 62, считывающим ее из памяти 92 для программы. Синусоидальная форма сигнала для привода 54 двигателя хранится в таблице 94 синусов, которая может быть частью памяти 92 или отдельным компонентом памяти, доступным центральному процессору 62 (фиг.2). Программа управления приводом и работа центрального процессора 62 и компонентов памяти рассматриваются ниже со ссылкой на фиг.4.
Схема 68 переключения предпочтительно может выполнять несколько функций для привода 54 двигателя. Согласно этой предпочтительной конфигурации схема 68 переключения функционирует как схема инвертирования фазы сигнала ШИМ для первого и второго приводов 56, 58, питая один из концов обмотки 60 двигателя сигналом, находящимся в противофазе с сигналом, подаваемым на другой ее конец, когда присутствует сигнал ШИМ. Сигнал ШИМ считается присутствующим, когда он обеспечивает переключение с периодической частотой и с соответствующим коэффициентом заполнения. Схема 68 переключения работает так же, как схема защиты от потери ШИМ, которая отключает привод 54 двигателя, когда сигнал ШИМ отсутствует. Отключение привода 54 двигателя предотвращает протекание чрезмерно больших токов через привод двигателя и шаговый двигатель 52.
Вместо того чтобы переключать направление Н-моста (то есть направление тока, который будет течь в обмотке двигателя, подключенного к Н-мосту), каждый полупериод синусоиды, как это традиционно делается, в данном изобретении направление Н-моста переключается с намного более высокой частотой, предпочтительно 19,5 кГц. Частота 19,5 кГц является достаточно низкой, с точки зрения максимального числа шагов для аппроксимации чисто синусоидального сигнала, но достаточно высокой для того, чтобы находиться вне звукового диапазона, воспринимаемого человеческим слухом. Таким образом, коэффициент заполнения переключающего колебания с частотой 19,5 кГц используется для управления направлением и величиной тока в обмотках двигателя. Коэффициент заполнения сигнала управления с частотой 19,5 кГц, равный 50%, при этом предпочтительно соответствует нулевому току обмотки. Аналогично, коэффициент заполнения 0% будет соответствовать максимальному току обмотки в одном направлении, а коэффициент заполнения 100% - максимальному току обмотки в другом направлении.
Согласно данному изобретению синусоидальный ток в обмотках шагового двигателя 60 формируют, изменяя по синусоидальному закону коэффициент заполнения сигнала с частотой 19,5 кГц, коммутирующего Н-мост, где коэффициент заполнения 50% также представляет нулевое напряжение на обмотках. Величина синусоидального отклонения коэффициента заполнения от 50% ("качание") соответствует амплитуде синусоидального сигнала. С другой стороны, частота синусоидального отклонения коэффициента заполнения соответствует скорости вращения ведущего вала шагового двигателя, при этом один период синусоиды соответствует одному шагу. Чем выше частота синусоидального изменения сигнала управления Н-мостом, тем выше скорость вращения вала двигателя. Эта конфигурация допускает прямое управление приводом 54 двигателя и схемой 68 переключения с помощью напряжения, что в свою очередь позволяет данному изобретению эффективно функционировать при любой скорости вращения двигателя.
Прямое биполярное управление с помощью напряжения обеспечивается питанием каждого конца обмотки 60 шагового двигателя сигналом, находящимся в противофазе с сигналом другого конца, и применением 50%-ного коэффициента заполнения ШИМ в качестве состояния привода при нулевом напряжении. Коэффициент заполнения, превышающий 50%, вызовет протекание положительного тока через обмотку 60, в то время как коэффициент заполнения, меньший 50%, вызовет протекание отрицательного тока. В этой конфигурации нет дополнительной необходимости переключать фазу тока обмотки. Одна сторона обмотки 60 питается непосредственно сигналом ШИМ (через первый привод 56), в то время как другая сторона питается (через второй привод 58) инвертированным сигналом ШИМ от схемы 68 переключения, когда присутствует ШИМ. Эта конфигурация позволяет в данном изобретении посредством упрощенных аппаратных средств осуществлять инвертирование, которое при обычном способе необходимо программировать в программе центрального процессора.
При прямом управлении напряжением согласно данному изобретению напряжение подается на обмотку 60 двигателя, когда ШИМ присутствует, при этом каждый конец обмотки находится в противофазе с другим концом. Однако, когда ШИМ отсутствует (пропадает), предпочтительная конфигурация схемы 68 переключения выполняет также функцию защиты от пропадания ШИМ.
ШИМ может пропадать, когда центральный процессор инициализируется и мгновенный ток очень высок или просто когда выполнение программы управления двигателем останавливается по какой-либо причине. Особенно важно в таких случаях предохранить шаговый двигатель 52 и привод 54 двигателя от получающихся в результате больших токов. Предпочтительная конфигурация схемы 68 переключения и схемы 72 накачки заряда позволяет схеме накачки заряда прекратить функционировать, когда ШИМ отсутствует. В таком случае логическое состояние второго входа 76 схемы исключающее ИЛИ станет "низким" и схема 68 переключения будет работать как простой буфер. Соответственно, напряжение (высокое или низкое), прикладываемое к каждому из концов обмотки 60, будет одинаковым и поэтому никакой ток не будет течь через обмотку; таким образом предотвращаются чрезмерные токи и, в частности, предотвращается повреждение ими двигателя 52.
Прямое управление с использованием управляющего напряжения также позволяет получать опорный сигнал синхронизации ШИМ (не показан) от стабильного кварцевого генератора, что в известных способах обычно невозможно. Нежелательный шум, как таковой, можно также еще более уменьшить согласно данному изобретению, особенно когда управляющее напряжение более точно аппроксимирует чистую синусоиду, как в рассматриваемом ниже случае. Разомкнутая конфигурация системы согласно данному изобретению также предполагает, что никакая обратная связь от двигателя 52 к центральному процессору 62 или от двигателя к приводу 54 двигателя не требуется.
Прямое управление с использованием управляющего напряжения без обратной связи также позволяет в данном изобретении избежать проблем, связанных с использованием замкнутых систем с обратной связью по току. Устраняются избыточные электрические соединения, необходимые для обратной связи. Аномалии мертвой зоны корректируются в центральном процессоре 62 с помощью предыскажения синусоидального отклонения коэффициента заполнения так, что переход через точку 50%-ного коэффициента заполнения (нулевую точку) происходит более быстро при низких скоростях вращения вала. Когда скорость вращения вала двигателя увеличивается, этот эффект уменьшается и в конечном счете устраняется, так как он становится ненужным. Такое предыскажение происходит в реальном времени, когда двигатель работает в зависимости от скорости вращения вала двигателя. Следует отметить, что эта зависимость в реальном времени не образует управление с замкнутым контуром или с обратной связью, так как скорость вращения вала двигателя рассчитывается программой управления шаговым двигателем, а не измеряется на самом деле у физического двигателя.
Предсказанная (расчетная) скорость вращения вала полезна для компенсации других проблем приводов шаговых двигателей, обнаруженных авторами данного изобретения. Одной из таких проблем является то, что эффективная амплитуда синусоидального сигнала управления должна увеличиваться с увеличением частоты сигнала управления, чтобы компенсировать возрастание импеданса обмотки, обусловленное индуктивными свойствами обмотки 60. Когда частота увеличивается, увеличивается также и полное сопротивление. Если амплитуда сигнала управления не увеличивается с частотой, то увеличение скорости вращения вала приводит к уменьшению крутящего момента двигателя 52, что является нежелательным. Данное изобретение автоматически и эффективно компенсирует эту потерю крутящего момента, используя предсказанную скорость вала двигателя для автоматической подстройки амплитуды отклонения коэффициента заполнения для привода 54 двигателя (Н-моста).
Обратимся теперь к фиг.4, на которой показано вычисление подстройки для сигнала ШИМ, подаваемого на привод 54 двигателя (и схему 68 переключения), что предпочтительно выполняется путем программирования центрального процессора 62, памяти 92 для хранения программы и/или таблицы 94 синусов. Управляющий сигнал напряжения ШИМ предпочтительно позволяет шаговому двигателю 52 делать микрошаги с 1024 дискретными шагами на полный шаг двигателя, чтобы гладко аппроксимировать чистую синусоиду.
На этапе S1 предсказывается угловое ускорение (α) вала (не показан) двигателя 52. Предсказанное значение α определяется путем анализа или желаемого угла поворота вала в сравнении с предсказываемым отклоненным углом поворота вала для контроллера положения, или желаемой скорости вращения вала в сравнении с предсказываемой отклоненной скоростью вала для контроллера скорости вращения. Эти предсказываемые отклоненные значения предварительно определяются опытным путем согласно ожидаемым известным характеристикам самого двигателя 52 и предпочтительно считываются из памяти 92 программ или таблицы 94 синусов центральным процессором 62.
Эти желаемые значения (положения или скорости) представляют идеальные значения, которых система 50 с шаговым двигателем должна достигнуть при эксплуатации. Предсказываемые значения, с другой стороны, представляют ожидаемые отклонения, наблюдаемые для систем с двигателями этих типов. Авторы данного изобретения обнаружили, что эти предсказываемые значения адекватно и точно заменяют фактические, динамически измеренные значения углового положения и/или скорости при нормальных скоростях и нагрузках привода для таких систем с шаговыми двигателями. Хотя данное изобретение устраняет потребность в каких-либо действительных динамических измерениях во время работы такого устройства, одно фактическое калибровочное измерение предпочтительно выполняется при инициализации или запуске устройства, чтобы физически измерить характеристики и откалибровать устройство перед обычной эксплуатацией.
На этапе S2 вычисляется угол поворота или позиция (θ) вала. Вычисление позиции вала основано на текущей скорости вращения (ω), предыдущем угловом положении (θLast) и желаемом ускорении α. Следующая формула соответствует основному уравнению кинематики для вычисления нового положения:
θ = θLast + ω*t + 1/2α * t2.
На этапе S3 по вычисленному новому положению вала θ определяют индекс поиска для таблицы синусов шагового двигателя. В предпочтительной форме осуществления изобретения внутренняя переменная для положения вала двигателя θ фактически масштабируется с увеличением в 212 (или 4096) раз. Единицами θ предпочтительно также являются микрошаги, а не градусы. Согласно этой форме осуществления изобретения значение θ может быть непосредственно преобразовано в индекс таблицы 94 синусов простым делением θ на 4096 (или на учетверенное число микрошагов в шаге).
На этапе S4 предсказывается текущее отклонение положения вала. Необходимое напряжение обмотки двигателя (для каждой фазы обмотки 60 двигателя) считывается из таблицы 94 синусов. Это считываемое напряжение представляется числом, называемым Амплитудой. Амплитуда является восьмиразрядным числом со знаком (положительным или отрицательным) и соответствует качанию коэффициента заполнения, рассмотренному выше. Другими словами, Амплитуда определяется в пределах следующих границ:
-255 < Амплитуда < 255.
Таким образом, изменение Амплитуды в зависимости от положения вала 8 представляет чистое (аппроксимированное) синусоидальное изменение. Следовательно, в таблице 94 синусов имеется 1024 записей для каждого шага шагового двигателя 52. Другими словами, шаговый двигатель 52 работает в микрошаговом режиме с 1024 микрошагами на каждый полный шаг.
На этапе S5 текущая угловая скорость вала ω рассчитывается согласно предсказанному ускорению α вала, а предсказанное отклонение положения вала (значение ШИМ) подстраивается на основании рассчитанной скорости ω.
Сначала "Подстройка Частоты ШИМ" определяется умножением Амплитуды, полученной из таблицы 94 синусов, на "Масштабный Коэффициент". Масштабный Коэффициент определяется на основе вычисленной угловой скорости ω вала и динамически изменяется как функция скорости вращения вала согласно следующей формуле:
Масштабный Коэффициент = Опорный Уровень + (Наклон * ω).
Масштабный Коэффициент компенсирует потерю крутящего момента, описанную выше, чтобы поддерживать крутящий момент двигателя в основном постоянным, когда скорость вращения изменяется. Опорный Уровень и Наклон представляют собой определяемые опытным путем характеристики самого шагового двигателя 52. Опорный Уровень определяет ток двигателя при нулевой скорости вала. Наклон является коэффициентом для компенсации индуктивной составляющей импеданса обмотки 60. Этот импеданс увеличивается по мере возрастания частоты привода, являясь линейной функцией индуктивности обмотки. Эффектом применения Наклона поэтому является поддержание тока обмотки относительно постоянным при изменении скорости. Таким образом, расчетный Масштабный Коэффициент является линейной функцией угловой скорости вала двигателя, подстраиваемой для компенсации индуктивной составляющей полного сопротивления и масштабируемой для получения постоянного крутящего момента двигателя.
Важно заметить, что точное значение максимального тока обмотки зависит как от напряжения источника питания, так и от скорости вращения вала ω. Природа электронных схем приводов этого типа такова, что при конкретном напряжении источника питания ток в обмотках двигателя обычно увеличивается по мере уменьшения скорости вращения вала вследствие индуктивной составляющей импеданса обмоток двигателя. С другой стороны, приведенные здесь вычисления программными средствами автоматически корректируют этот эффект "на лету", подстраивая Масштабный Коэффициент в зависимости от скорости вращения вала ω. Масштабный Коэффициент начинается с минимального значения Опорного Уровня и затем увеличивается как функция скорости вращения вала.
"Подстройка Частоты ШИМ" тогда может быть рассчитана по следующей формуле:
Подстройка Частоты ШИМ = Амплитуда * Масштабный Коэффициент.
"Подстроенное Значение ШИМ" тогда легко определяется по Подстройке Частоты ШИМ следующим образом:
Подстроенное Значение ШИМ = Средняя Точка ШИМ + Подстройка Частоты ШИМ.
Средняя Точка ШИМ является величиной ШИМ при коэффициенте заполнения 50% (нулевое качание), описанном выше. Следовательно, Подстройка Частоты ШИМ является положительным или отрицательным числом, представляющим величину отклонения от средней точки, соответствующей коэффициенту заполнения 50%.
На этапе S6 Подстроенное Значение ШИМ корректируется с учетом аномалии пересечения нулевого уровня. Эта коррекция учитывает аномалию мертвой зоны, описанную выше, которая возникает, когда сигнал напряжения шагового двигателя пересекает нулевую точку или коэффициент заполнения 50%. Коррекция пересечения нулевого уровня (Z-Fix) представляет собой коэффициент намеренного искажения, который динамически "на лету" прикладывается к Подстроенному Значению ШИМ перед тем, как оно подается на привод 54 двигателя (и схему 68 переключения). Коэффициент коррекции Z-Fix обеспечивает компенсацию эффекта заметной временной задержки, испытываемой валом двигателя на низких скоростях вращения при переходе через нулевую точку (реверсировании коэффициента заполнения).
Прежде всего определяется Нулевой Масштабный Коэффициент по следующей формуле:
Нулевой Масштабный Коэффициент = Нулевой Опорный Уровень - (Нулевой Наклон * ω).
Характеристики Нулевой Опорный Уровень и Нулевой Наклон определяются опытным путем для конкретного двигателя 52 аналогично Опорному Уровню и Наклону на шаге S5. Однако Нулевой Масштабный Коэффициент не может быть отрицательным числом. Нулевой Масштабный Коэффициент будет приравниваться к нулю всякий раз, когда произведение ω и Нулевого Наклона превышает Нулевой Опорный Уровень или равно ему. Другими словами, Нулевой Масштабный Коэффициент исчезает при высоких угловых скоростях вала (больших ω).
Фактический коэффициент коррекции пересечения нулевого уровня Z-Fix тогда может быть рассчитан как функция Амплитуды и Нулевого Масштабного Коэффициента:
Z-Fix = Нулевой Масштабный Коэффициент - ((Нулевой Масштабный Коэффициент/255)*Амплитуда).
Как видно из формулы, Нулевой Масштабный Коэффициент перед перемножением с Амплитудой сначала делится на 255 (что является максимальным значением в таблице 94 синусов). Поэтому коэффициент коррекции Z-Fix является функцией как значения из таблицы 94 синусов, так и скорости вращения вала ω, но, как отмечено выше, Z-Fix будет уменьшаться по мере увеличения скорости и будет равен нулю при очень высоких скоростях вращения вала.
Z-Fix затем добавляется к Подстроенному Значению ШИМ, чтобы получить Откорректированное Значение ШИМ:
Откорректированное Значение ШИМ = Подстроенное Значение ШИМ + Z-Fix.
Следовательно, при высоких скоростях вращения Откорректированное Значение ШИМ будет просто равно Подстроенному Значению ШИМ. Программное обеспечение вывода сигнала здесь корректирует эффект низкоскоростного пересечения нулевого уровня с помощью предыскажения формы сигнала около точки перехода через нуль. Так как эта коррекция необходима только на низких скоростях, предыскажения в конечном счете устраняются, когда скорость вращения вала двигателя возрастает.
На шаге S7 Откорректированное Значение ШИМ подается на привод 54 двигателя (и схему 68 переключения) в качестве текущего сигнала ШИМ.
Как показано выше, эта форма осуществления изобретения эффективно корректирует нескольких аномалий, с которыми обычно сталкиваются в двигателях и приводах таких типов. Благодаря управлению программными средствами в центральном процессоре 62 данное изобретение способно эффективно компенсировать увеличивающийся ток обмотки, поддерживая ток обмотки относительно постоянным при изменении скорости вращения вала. Данное изобретение также эффективно компенсирует аномалии мертвой зоны при пересечении нулевого уровня, которые являются особенно заметными при низких рабочих скоростях двигателя. Возможности коррекции, описанные здесь, обеспечивают также коррекцию заметных эффектов, которые появляются, когда такие устройства работают на скоростях, вызывающих собственный резонанс.
Благодаря этим особенностям данного изобретения шаговым двигателем можно бесшумно и плавно управлять в непрерывном диапазоне рабочих скоростей. Оператор не ограничен единственной или дискретными рабочими скоростями или частотами, заранее задаваемыми в других обычных устройствах.
Хотя в описании были рассмотрены частные формы осуществления схем и способов управления согласно данному изобретению, специалистам в данной области техники будет ясно, что возможны различные изменения и модификации без отступления от идеи изобретения в пределах его объема, охватываемого приводимой ниже формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2722417C1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1102005A1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1295501A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU957172A1 |
| Способ управления шаговым двигателем | 1989 |
|
SU1647842A1 |
| Устройство для управления шаговым двигателем | 1976 |
|
SU738092A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679598A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1015339A1 |
| Устройство для программного управления @ -фазным шаговым двигателем | 1990 |
|
SU1718187A1 |
| Устройство для управления двумя шаговыми двигателями | 1977 |
|
SU743153A1 |
Схема привода для шагового двигателя использует процессор, формирующий на выходе сигнал широтно-импульсной модуляции (ШИМ). Схема привода содержит схему Н-моста, имеющую первый и второй входы и схему переключения, имеющую вход и выход. Первый вход Н-моста и вход схемы переключения подключены к выходу сигнала ШИМ процессора, а выход схемы переключения подключен ко второму входу Н-моста. Схема переключения инвертирует коэффициент заполнения ШИМ, когда сигнал ШИМ присутствует, и не инвертирует коэффициент заполнения, когда сигнал ШИМ отсутствует. Технический результат - снижение рабочего шума двигателя. 3 н. и 23 з.п. ф-лы, 4 ил.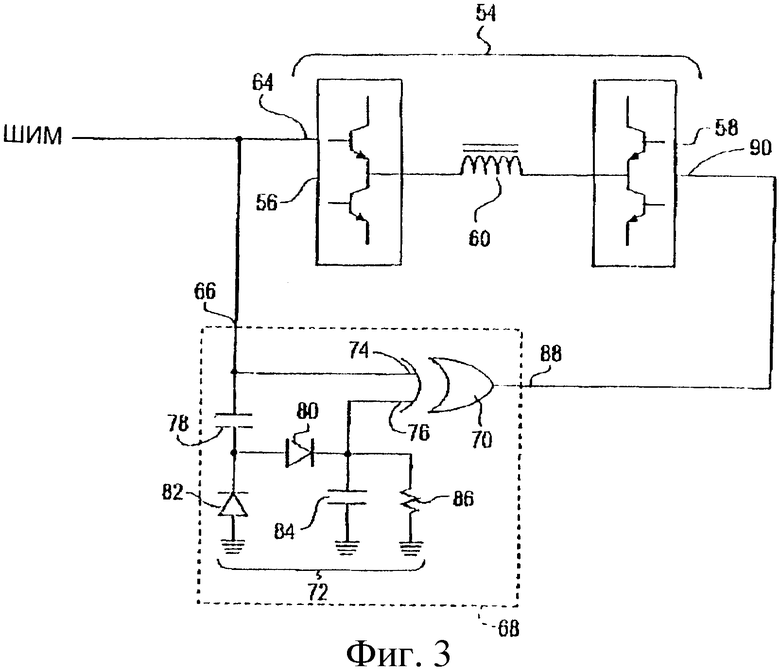
1. Схема привода для шагового двигателя с процессором, формирующим сигнал с широтно-импульсной модуляцией (сигнал ШИМ), содержащая:
схему Н-моста, первый вход которой соединен с выходом сигнала ШИМ процессора, и
схему переключения, вход которой соединен с выходом сигнала ШИМ процессора, а выход соединен со вторым входом указанного Н-моста, при этом указанная схема переключения выполнена с возможностью функционировать как инвертирующая схема для инвертирования сигнала ШИМ с обеспечением подачи на концы обмотки двигателя напряжений, находящихся в противофазе, когда сигнал ШИМ присутствует, и с возможностью функционировать как буферная неинвертирующая схема с обеспечением подачи на концы обмотки двигателя одинаковых напряжений, когда сигнал ШИМ отсутствует.
2. Схема привода по п.1, отличающаяся тем, что она выполнена как схема без обратной связи.
3. Схема привода по п.1, отличающаяся тем, что указанная схема переключения содержит схему накачки заряда и схему ИСКЛЮЧАЮЩЕЕ ИЛИ, один вход которой образует вход схемы переключения, а другой вход соединен с выходом сигнала ШИМ процессора через схему накачки заряда, выполненную с возможностью прекращения ее работы, когда сигнал ШИМ отсутствует.
4. Система с шаговым двигателем, содержащая:
шаговый двигатель;
процессор и
схему привода двигателя по п.1 для управления указанным шаговым двигателем.
5. Система по п.4, отличающаяся тем, что она функционирует как система без обратной связи.
6. Система по п.5, отличающаяся тем, что процессор динамически корректирует сигнал ШИМ при низких скоростях вращения вала шагового двигателя.
7. Система по п.6, отличающаяся тем, что угловое положение вала двигателя калибруется при инициализации или запуске системы.
8. Система по п.4, отличающаяся тем, что схема переключения содержит схему накачки заряда и схему ИСКЛЮЧАЮЩЕЕ ИЛИ, один вход которой образует вход схемы переключения, а другой вход соединен с выходом сигнала ШИМ процессора через схему накачки заряда, выполненную с возможностью прекращения ее работы, когда сигнал ШИМ отсутствует.
9. Система по п.4, отличающаяся тем, что она дополнительно содержит
память для программы, доступную процессору, и
таблицу синусов, доступную процессору.
10. Система по п.4, отличающаяся тем, что таблица синусов хранит значения аппроксимированной чистой синусоиды.
11. Система по п.4, отличающаяся тем, что буферная схема, по существу, предотвращает протекание тока через схему привода двигателя и обмотки шагового двигателя, когда упомянутый сигнал ШИМ отсутствует.
12. Система по п.4, отличающаяся тем, что сигнал ШИМ имеет коэффициент заполнения,
причем коэффициент заполнения, равный 50%, представляет нулевое напряжение на обмотках шагового двигателя,
коэффициент заполнения, равный 0%, представляет максимальный ток через обмотки в первом направлении, и
коэффициент заполнения, равный 100%, представляет максимальный ток через обмотки во втором направлении, противоположном первому направлению.
13. Система по п.12, отличающаяся тем, что первое и второе направления тока переключаются с частотой около 19,5 кГц.
14. Система по п.4, отличающаяся тем, что схема привода двигателя является схемой с прямым управлением напряжением.
15. Система по п.4, отличающаяся тем, что она дополнительно содержит опорный сигнал синхронизации ШИМ, получаемый от стабильного кварцевого генератора.
16. Система по п.4, отличающаяся тем, что один шаг шагового двигателя равен одному периоду синусоиды и включает 1024 микрошага.
17. Способ управления шаговым двигателем, имеющим схему привода шагового двигателя для управления шаговым двигателем, включающий:
предсказание углового ускорения вращаемого вала двигателя;
вычисление углового положения вала на основании предсказанного ускорения вала;
предсказание значения текущего отклонения вычисленного положения вала на основании вычисленного положения вала;
вычисление скорости вращения вала двигателя на основании предсказанного ускорения вала;
подстройку предсказанного значения текущего отклонения на основании вычисленной скорости вала;
коррекцию подстроенного значения отклонения с учетом аномалии пересечения нулевого уровня и
подачу откорректированного значения отклонения на схему привода двигателя.
18. Способ по п.17, отличающийся тем, что откорректированное значение отклонения подается на схему привода в виде сигнала ШИМ.
19. Способ по п.17, отличающийся тем, что величина коррекции при указанном выполнении коррекции уменьшается, когда вычисленная скорость вала увеличивается.
20. Способ по п.19, отличающийся тем, что при высоких скоростях вращения вала указанное откорректированное значение отклонения равно указанному подстроенному значению отклонения.
21. Способ по п.17, отличающийся тем, что при предсказании ускорения оно определяется на основании желаемого угла вала в сравнении с предсказываемым отклоненным углом вала для контроллера положения и/или на основании желаемой скорости вала в сравнении с предсказываемой отклоненной скоростью вала для контроллера скорости.
22. Способ по п.21, отличающийся тем, что предсказываемые отклоненные угол вала и скорость определяют опытным путем.
23. Способ по п.17, отличающийся тем, что при указанном вычислении положения вала положение вала вычисляют как сумму предыдущего положения вала, произведения предсказанной скорости вала на время и половины произведения предсказанного ускорения вала на квадрат времени.
24. Способ по п.23, отличающийся тем, что для получения индекса поиска в таблице синусов вычисленное положение вала делят на 4096.
25. Способ по п.17, отличающийся тем, что при указанной подстройке вычисленную скорость вала сначала компенсируют с учетом протекания тока через обмотки шагового двигателя при нулевой скорости вала и/или с учетом индуктивности обмоток.
26. Способ по п.25, отличающийся тем, что крутящий момент шагового двигателя поддерживают в основном постоянным в непрерывном диапазоне скоростей вращения вала.
| US 5936371 A, 10.08.1999 | |||
| Система управления двигателем с блоком защиты от перегрузок | 1990 |
|
SU1749976A1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2091978C1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU957172A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5450521 A, 12.09.1995 | |||
| US 5459432 A, 17.10.1995. | |||

