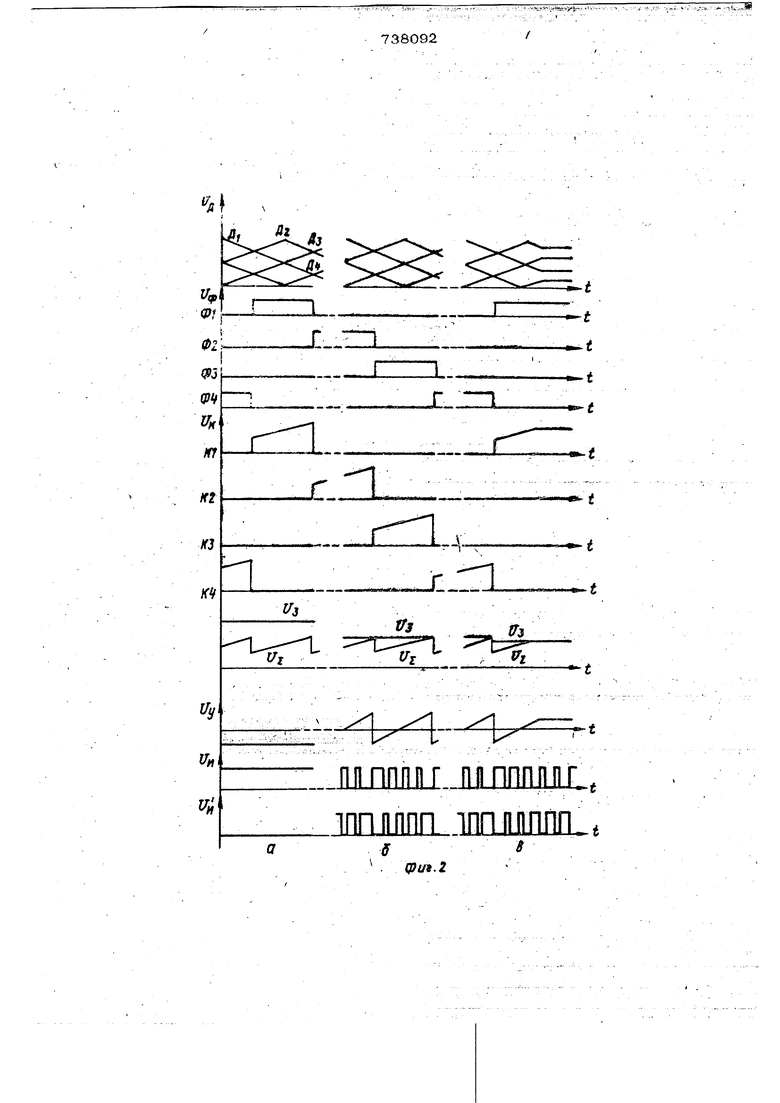
Изобретение относится к электротехнике, в частности к электроприводам, и может быть использовано для управления шаговым двигателем в системах автоматического регулирования. Известно устройство для управления шаговым двигателем, содержащее многоканальный датчик положения ротора, связанный со входами усилителей мощности, коммутирующих фазы двигателя и осуществляющих модуляцию фазных напряжений И Наиболее близким к изобретению по технической сущности является устройство для управления шаговым двигателем содержащее элемент сравнения, многоканальный датчик положения ротора, связанный со входами усилителей мощности, коммутирующих фазы двигателя, через элементы И, вторые входы которых соединены с выходом широтно-импульсного модулятора 2. Недостатком указанных устройств является невозможность получения равномерного движения при низких скоростях. Целью изобретения является повышение равномерности движения шагового двигателя. Поставленная цель достигается тем, что устройство содержит преобразователь многофазной системы напряжения датчика. в однофазную пилообразную и функциональный генератор пилообразного напряжения с элементом синхронизации, связанный своими входами с выходами датчика положения, а выходом - с одним входом элемента сравнения, подключенного вторым своим входом к выходам датчика положения через преобразователь многофазной системы напря: сений в с днофазную. Такое вьгаолнение устройства повышает равномерность движения шагового двигателя благодарякорректировке;законов изменения фезных токов в функции текущего положения ротора двигателя. На фиг. 1 приведена функциональная схема предлагаемого устройства, применительно к четырехфааному шаговому двигателю, на фиг. 2-3 - временные диаграммы сигналов на отдельных элементах устройства и моментные кривые для различных режимов работы. Устройство (фиг. 1) содержит шаговый двигатель 1, на валу которого укреплен многофазный датчик 2 положения ротора, выходы которого через ключи 3 - 6, связанные управляющими выходами с первой группой формирователей 7 - 10, входы которых соединены с выходами датчика, связаны с входами суммирующего усилителя 11, выход которого подключен к первому входу элемента сравнения 12, соединенного выходом со входом широтно-импульсного модулятора 13. Второй вход элемента сравнения через ключи 14 и 15, управляемые по шинам 16 и 17, соответственно связан с шиной задающего сигнала 18 и с выхо дом управляемого функционального генера тора 19, управляющий вход которого через элемент ИЛИ 20 подключен к выходам второй группы формирователей 21 - 24, входы которых соединены с выходам первой группы формирователей, Фазные обмотки шагового двигателя через усилители мощности 26 - 28 связаны с выходами элементов ИЛИ 29 - 32, первые входы которых соединены с выходами вто рой группы элементов И 33 - 36, а вторые входы-с выходами второй группы элементов И 37 - 40. Первые входы элементов И первой группы связаны с выходами первой группы формирователей, а вторые входы - с выходом широтнонмпульсного модулятора. Первые входы элементов И второй группы связаны с выходами первой группы формирователей, а вторые входы через инвертор 41-е выходом широтно-импульсного модулятора. Работа описанного устройства при подаче управляющего сигнала по шине 18 поясняется временными дИ1аГраммами сиг наПов на отдельных элементах (фиг. 2) где показаны напряжения Ujj на выхода фаз датчика 2 положения ротора Д. ,Дл Дл .Д напряжения Uqi на выходах Ф, Фл, Фд, Ф формирователей 7-10; напряжения Ut, на выходах К, ,, К, К i ключей 3-6; сигналы,, поступающие с выхода суммирующего усилителя U и по шине задающего сигнала U на два входа устройства сравнения 12; сигнал и у на входе шйротно-импульсного моду738092лятора 13, а также сигналы Uf и U на выходе этого модулятора и инвертора 41 соответственно. Положение ротора шагового двигателя в пределах одн.ого полюсного деления однозначно определяется номером формирователя первой группы, имеющего в данный момент времени высокий потенциална выходе и уровнем сигнала на выходе фазы датчика, подключенной в данный момент через один из аналоговых ключей 3 - 6 на вход суммирующего усилителя 11. Сигнал с датчика имеет вид многофазной системы непрерывных напряжений треугольной формы, причем, геометрия ротора датчика согласована с геометрией ротора машины. .Текущее значение уровня сигнала с фазы датчика на выходе суммирующего усилителя сравнивается устройством сравнения 12с величиной уровня управляющего сигнала на шине задающего сигнала 18 или с выхода управляемого функционального генератора 19. Коэффициент заполнения К о импульсной последовательности на выходе широтно-импульсного модулятора 13 пропорционален величине разностного сигнала на выходе устройства сравнения, а коэффициент заполнения импульсной последовательности на выходе инвертора 41 будет при этом (1 - Ко) Сигнал с выхода каждого из формирователей 7-10 управляет одним из элементов И группы 33 - 36 и одним из элементов И группы 37 - 40. Например, сигнал, с выхода формирователя 7 подключает сигнал с выхода широтноИмпульсного модулятора через элементы И 33, ИЛИ 29, усилитель мощности 25 к первой фазешагового двигателя и проинвертированный инвертором 41 сигнал модулятора через элементы И 38, ИЛИ 30, усилитель мощности 26 - ко второй обмотке шагового двигателя. Частота следования импульсов на выходе широтно-импульсного модулятора выбирается во много раз больше частоты собственных колебаний электропривода. При этом среднее значение токов в об- мотках двигателя пропорционально коэффициенту заполнения импульсной последовательности, поступающей на усилители мощности. В эаёиЬйМЪсГй ot уровня управляющего сигнала, поступающего по шине 18 возможны различные режимы работы устройства.
При величине управляющего сигнала, поступающего по шине 18 на устройство сравнения 12, превышающего амплитуду сигнала, поступающего на другой вход устройства сравнения с выхода суммирующего усилителя 11, на выходе устройства сравнения формируется сигнал постоянной амплитуды, которому соответствует импульсный сигнал с К -j -1 на выходе широтно импульсного модулятора 13 (см. фиг. 2, а). В этом случае шаговый двигатель работает в режиме бесколлек- торной машины посгоянного тока.
При величине управляющего сигнала, равного амплитуде сигнала с выхода суммирующего усилителя, на выходе устройства сравнения формируется пилообразный сигнал с периодом, соответствующим, времени отработки одного шага, которому соответствует импульсный сигнал с изменяющимся К,, от К, -1 до Kj-0 на выходе широтно-импульсного модулятора (см. фиг. 2,6).
Таким образом, за период отработки одного шага.среднее значение тока в одной из включенных фаз изменится от установившегося значения до нуля, а в другой фазе наоборот. Суммарная моментная характеристика, образуемая токами двух фаз шагового двигателя, равномерно сместится в диапазоне одного шага.
При уровне -управляющего сигнала на шине 18 меньшем, чем амплитуда сигнала с выхода суммирующего усилителя, на выходе элемента сравнения формируется управляющий сигнал, соответствующий заданной уровнем сигнала на шине 18 позиции ротора внутри шагового инвер-; тора. При этом на выходе широтно-импульсного модулятора формируется импульсный сигнал с K-j , определяемым величиной сигнала на выхода устройства сравнения, и суммарная моментная характеристика, образуемая токами двух включенных соседних фаз шагового двигателя, равномерно сместится в промежуточное положение, обеспечивая установку ротора двигателя в необходимое положение внутри одного шага. В случае отклонения ротора от положения, определяемого управляющим сигналом, поступающим .по шине 18, величина сигнала с датчика 2 и, следовательно, с выхода суммирующего усилителя также изменится в ту или другую сторону. Это приведет к изменению .величины сигнала на выходе устройства сравнения и к изменению Ко импульсного сигнала на выходе широтноимпульсного модулятора. Изменение К импульсного сигнала вызовет изменение соотношения токов во включенных фазах шагового двигателя, суммарная моментная характеристика, образуемая токами , сместится в направлении, необходимом для возвращения ротора шагового двигателя в положение, определяемое управляющим сйгналом V:
При подаче управг яющего сигнала на
Р шину 17 на вход устройства сравнения 12 через ключ 15 задающи.й сигнал поступает с выхода управляемого функционального генератора 19. Форма упs:равляющего сигнала повторяет форму сигнала датчика положения 2 в те отрезки времени, на которые ключи 3-6 подключают соответствующие выходы через суммирующий усилитель 11 к элементу сравнения 12 (В описьгеаемом варианте
0 при линейной форме сигналов с датчика управляемый функциональный генератор должен быть генератором линейно изменяющегося напряжения, например,интегра5тором). Запускается функциональный генератор от передних фронтов сигналов с формирователей 7 - 1О, выделяемых формирователями 21-24 через элемент ИЛИ 2 О. При этом происходит процесс непрерывного сравнения текущего значения уровня сигнала функционального генератора 19 и сигнала датчика 2, вырабатываемого на выходе суммирующего усилителя 11.
При скоростях нарастания сигнала
5 функционального генератора, меньщих скорости механических переходных процессов шагового двигателя, осуществляется процесс непрерывного слежения сигнала датчика за сигналом с выхода функционального генератора, и следовательно, положения ротора за сигналом функционального генератора.
Работа схемы по непрерьганому сле5жению полностью аналогична вышеописанному процессу установки дискретных значений позиции внутри одного шага.
Работа устройства в режиме бескол- лекторной машины постоянного тока на
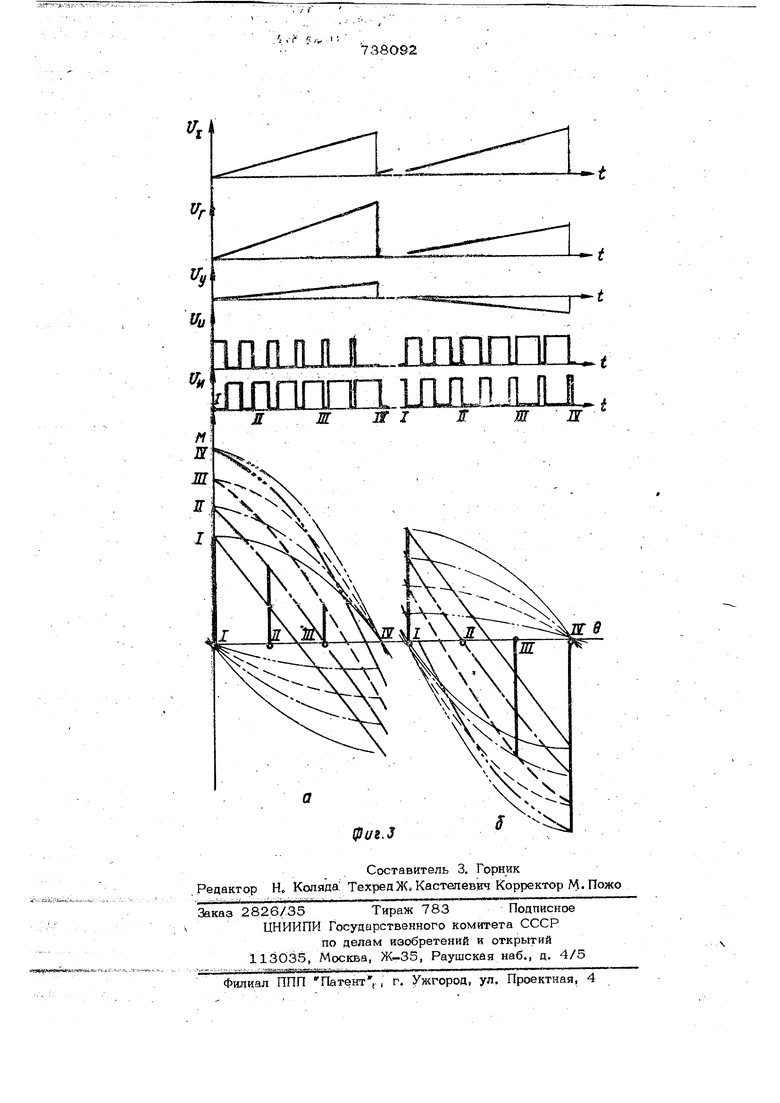
0 высоких скоростях при стабилизации скорости иллюстрируется временными диаграммами и моментными кривыми на фиг. 3. Здесь фиг. 3, а соответствует случаю, когда скорость шагового двига5теля, определяемая крутизной сигнала с датчика, меньше скорости, задаваемой ,крутизно.й сигнала Up на выходе функционального генератора; фиг. 3, б соответствуёт екоростй шагового двигателя больше заданной. Сигналы с прямого и инвертированного выходов генератора 13, соответственно й; и UH уЬлЬвйгб пЬка(ёанныё в меньшем масштабе времени, определяют уровень возбуждени я двух фай двигателя, участвующих в формировании суммарной моментной характеристики На фиг. 3 для обоих случаев показаны четыре реализации суммарной моментной характеристики, 1, П, Ш, .„О15У 5„ видно, что при оставании скорости от заданной, двигатель пострдано находится под действием положительных разгоняющих Моментов, в случае опережения балйнс положительных и отрицательных движущих моментов воздействует на двигатель в сторбну уменьшения его скорости. Этим достигается, стаб1ш 1зация скорости в режиме бесколлекторной машины постоянного тока. Таким образом, устройство обеспечивает следующие режимы работы двигате- ляГ позЩйбнйроваМИё внутри шага; равноМерное движение ротора при работе в режиме самокоммутации; стабилизацию и управление скоростью в режиме самоком-«утацйи; управляемое равномерное движение на низких и инфранизких-скоростях Устройство также позволяет получить различные сочетания указанных выше режимов путем простейших переключений во внешних цепях управления. ПоследЬвйтельность этих режимов в различных рёМййуётсяЕ 4HcfS эПёКТричесКИМ путем без применения механических связей и устройств, например,редукторов 73 с зубчатыми и другими передачами. Это позволяет значительно уменьш1 ть вес и р1азмеры и увеличить надежность приводов с шаговым двигателем для роботов, манипуляторов, ycTaiHOBOK автоматического скрайбирования и других систем, в которых требуется сочетание подобных разнообразных режимов работы привода. Формул а изобретен и я Устройство для управления шаговым дбигателем, содержащее элемент сравне.ния, многоканальный датчик положения ротора, связанный со в5содами усилителей Мощности, коммутирующих фазы двигателя, через элементы И, вторые входы которых соединены с выходом широтно-импульсного модулятора, отличающееся тем, что, с целью повышения равномерности движений, оно содержит преобразователь многофазной системы нап- ряжений датчика в однофазную пилообразную и функциональный генератор пилообразного Н1апряжения с элементом синхронизации, связанный своими входами с выходами датчика положения, а выходом - с одним вхедбМ элемента сравнения, под- ключеного вторым своим входом к выходам датчика положения через преобра- . зователь многофазной системы напряжений в однофазную. Источники информации, принятые во вн.имание при экспертизе 1.Авторское свидетельство СССР № 556542, кл. Н 02 К 29/02, 1974, 2.Патент США № 3305713, кл. 318-138, 1967.
ПЯППППГ ШПППМГ.
1ПППППП innumm:
t
S
. tpot.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |
| Устройство для управления N - фазным импульсным преобразователем напряжения | 1989 |
|
SU1791925A1 |
| Вентильный электродвигатель | 1979 |
|
SU817896A1 |
| Следящая система | 1982 |
|
SU1081622A1 |