1
Изобретение относится к электротехнике и может быть использовано в сие- темак автоматического управления приводом с шаговыми двигателями.
Известно устройство для управления несколькими двигателями, содержащее датчики скорости, схемы сравнения сигналов датчиков с заданными сигналами l .
Недостатком указанного устройства является невозможность получения синфазного движения двигателей, обусловленная низкой точностью синхронизации.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления двумя шаговыми дви1 ателями, содержащее в каждом из двух каналов датчик положения ротора двигателя, соециненный со входами распрецалителя импульсов, подключенного выходами ко входам усилителя мощности через элементы И 2.
Недостатком устройства является невозможность установления заданного соотношения угловых положений роторов и их скоростей, а также недостаточная точность, обусловленная тем, что сигналы с датчиков поступают только после отработки шага, что не позволяет контролировать положения ротора внутри шага.
Цель изобретения - повышение точности синхронизации и расширение диапазона изменения соотношения скоростей двигателей.
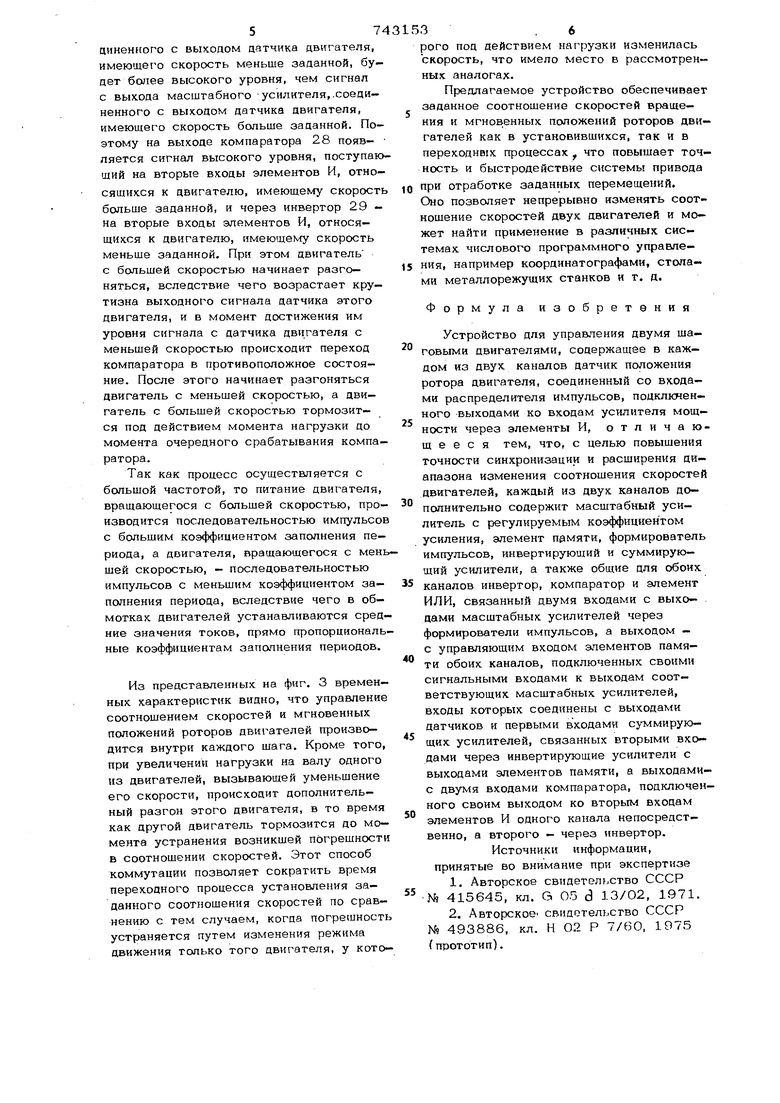
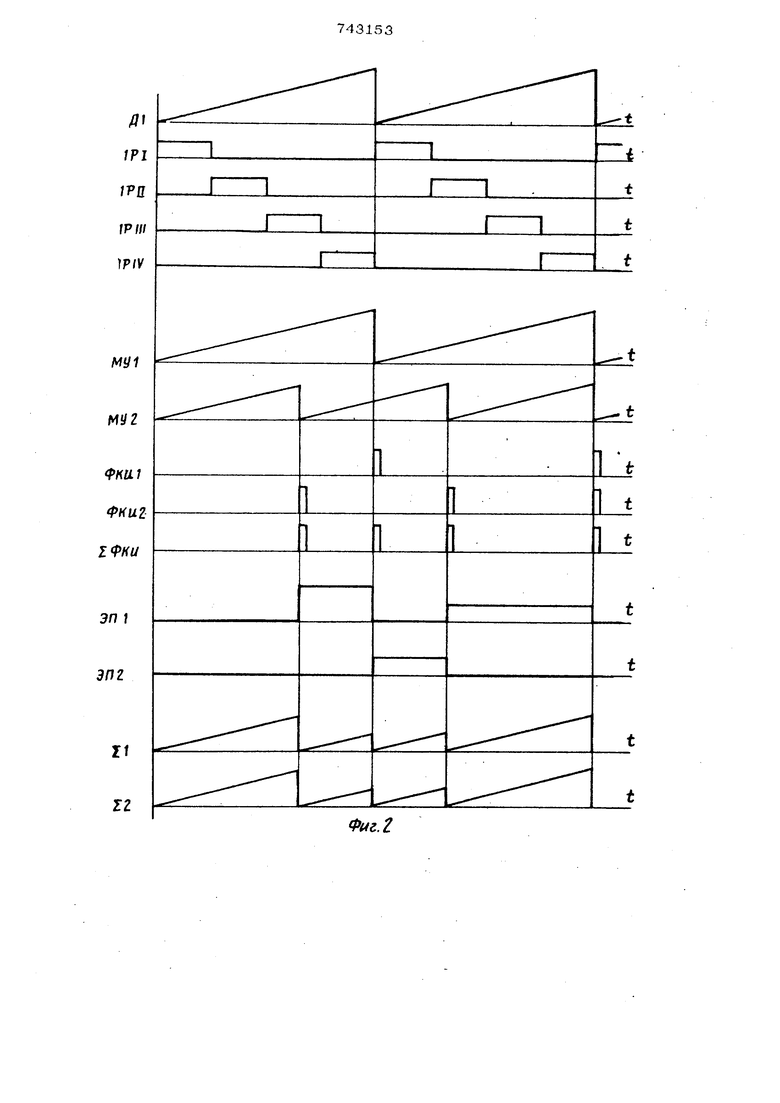
Это достигается тем, что каждый из двух каналов дополнительно содержит масштабный усилитель с регулируемым коэффициентом усиления, элемент памяти, формирователь имттульсов, инвертирующий и суммирующий усилители, а также общие для обоих каналов инвертор, компаратор и элемент ИЛИ, связанный двумя входами с выходами масштабных усилителей через формирователи импульсов, а выходом - с управляющим входом э.1е- ментов памяти обоик каналов, подключен ных своими сигнальными входами к выхо цам соответствующих масштабных усилит лей, вхоаы которых соединены с выходами датчиков и первыми входами суммирующих усилителей, связанных вторык и входами через инвертирующие усилители с выходами элементов памяти, а выходами - с двумя входами компаратора, подключенного своим выходом ко ВТОрым входам Элементов И одного канала непосредственно, а второго - через инвертор. На фиг. 1 показана функциональная схема предлагаемого устройства; на фиг. 2 и 3 - временные диаграммы сигналов на выходах элементов схемы применительно к четырекфазным шаговым двигателям. Предлагаемое устройство содержит шаговые двигатели 1 и 2 с потенциальными датчиками 3 и 4 положения на ва лах двигателей, соединенные с фазными усилителями 5 и 6 мощности. Выходы датчиков положения связаны через распределители 7 и 8 импульсов с первыми входами двух групп логических элементов И 9, 10, 11, 12, 13, 14, 15 и 16 и со входами масштабных усилителей 17 и 18, выходы которых соединены со входами формирователей 19 и 20 импульсов. Выходы формирователей 19 и 20 импульсов связаны со входами логического элемента ИЛИ 21, соединенного выходом с управляющими входами анало- гсшых элементов 22 памяти и 23, выходы которых соединены со входами инвертирующих усилителей 24 и 25 и со вторыми входами соответствующих суммирующих усилителей 26 и 27, подключенных первыми входами к выходам масштабных усилителей, а выходами - ко входам ком паратора 28. Выход компаратора 28 сое динен со вторыми входами элементов И первой группы, и через инвертор 29 со вторыми входами второй группы элементов И. Выходы каждой из групп элементов И связаны со входами соответствующих усилителей 5 и 6 мощности. На фиг. 2 показаны временные диагра мы выходного сигнала одного из датчиков Д1 и выходных сигналов с распределителя импульсов IPlj 1PII, IPIIf, 1Р1У, причем первая Цифра означает номер двигателя, а вторая - номер коммутируемой фазы. Кроме фи1ч изображены временные диаграммы сигналов с выходов масштабных усилителей МУ1 И МУ2, формирователей импульсов ФКИ1 и ФКИ 2 и элементов ИЛИ S ФКИ, а также элементов памяти ЭП1 и ЭП2 и суммирующих усилителей S1 и S2 . На фиг. 3 представлены временные диаграммы выходных сигналов с датчиков Д1, Д2 и выходных сигналов с сумматоров 21, S2, а также временные диаграммы прямого К и инвертированного И сигналов с выхода компаратора и временные диаграммы сигналов с выходов элементов И,-питающих фазы двигателей 1Ф1, 1ФП, 1Ф11.1, ГФ1У, 2Ф1, 2ФИ, 2Ф1П, 2Ф1У, причем пунктиром обведены сигналы с выходов распределителей импульсов, Устройство работает следующим образом. Шаговые двигатели 1 и 2 с потенциальными датчиками 3 и 4 положения на валах, соединенные с выходами фазных усилителей 5 и б мощности, работают в режиме бесколлекторной машины постоянного тока. Коммутация фаз обеспечивается подачей с выходов распределителей 7 и 8 импульсов на первые входы групп логических элементов И 9, 1О, 11, 12 и 13, 14, 15, 16. Пилообразные сигналы с датчиков положения подаются на масштабные усилители 17 и 18 с регулируемыми коэффициентами усиления. Соотношение коэффициентов усиления масштабных усилителей 17 и 18 задается обратно пропорциональным требуемому соотношению скоростей двигателей. Формирователи 19 и 2О импульсов вырабатывают импульсы в моменты времени, соответствующие концу периода следования сигналов с датчиков. Эти импульсы через логический элемент ИЛИ 21 поступают на управляющие входы аналоговых элементов 22 и 23 памяти, которые осуществляют запоминание текущего значе- НИН выходного сигнала каждого масштабного усилителя до момента прихода следующего импульса элемента ИЛИ. Уровни сигналов, заполненные элементами памяти, инвертируются на инвертирующих усилителях 24 и 25 и суммируются на суммирующих усилителях 26 и 27 с текущими значениями сигналов, поступающих с выходов соответствующих масштабных усилителей. Благодаря этому обеспечивается привязка начала пилообразных сигналов с разных масштабных усилителей к единому моменту времени. При отработке одного и того же угла поворота роторов обоих двигателей выходной сигнал с масштабного усилителя, сое- aviHeHHoro с выходом датчика двигателя, имеющего скорость меньше заданной, будет более высокого уровня, чем сигнал с выхода масштабного усилителя,.соединенного с выходом датчика двигателя, имеющего скорость больше заданной. Поэтому на выходе компаратора 28 появляется сигнал высокого уровня, поступаю щий на вторые входы элементов И, относящихся к двигателю, имеющему скорост больше заданной, и через инвертор 29 на вторые входы элементов И, относящихся к двигателю, имеющему скорость меньше заданной. При этом двигатель с большей скоростью начинает разгоняться, вследствие чего возрастает крутизна выходного сигнала датчика этого двигателя, и в момент достижения им уровня сигнала с датчика двигателя с меньшей скоростью происходит переход компаратора в противоположное состояние. После этого начинает разгоняться двигатель с меньшей скоростью, а двигатель с большей скоростью тормозится под действием момента нагрузки до момента очередного срабатывания компаратора. Так как процесс осуществляется с большой частотой, то питание двигателя, вращающегося с большей скоростью, производится последовательностью импульсо с большим коэффициентом заполнения периода, а двигателя, вращающегося с мен шей скоростью, - последовательностью импульсов с меньшим коэффициентом заполнения периода, вследствие чего в обмотках двигателей устанавливаются сред ние значения токов, прямо пропорциональ ные коэффициентам заполнения периодов. Из представленных на фиг. 3 временных характеристик видно, что управление соотношением скоростей и мгновенных положений роторов двигателей производится внутри каждого шага. Кроме того, при увеличении нагрузки на валу одного из двигателей, вызывающей уменьщение его скорости, происходит дополнительный разгон этого двигателя, в то время как другой двигатель тормозится до момента устранения возникшей погрешности в соотношении скоростей. Этот способ коммутации позволяет сократить время переходного процесса установления заданного соотношения скоростей по сравнению с тем случаем, когда погрешность устраняется путем изменения режима движения только того двигателя, у которого под действием нагрузки изменилась скорость, что имело место в рассмотренных аналогах. Предлагаемое устройство обеспечивает заданное соотношение скоростей вращения и мгновенных положений роторов двигателей как в установившихся, так и в переходнвгх процессах что повышает точность и быстродействие системы привода при отработке заданных перемещений. Оно позволяет непрерывно изменять соотношение скоростей двух двигателей и может найти применение в различных системах числового программного управле- ния, например координатографами, столами металлорежущих станков и т. д. Формула изобретения Устройство для управления двумя шаговыми двигателями, содержащее в каждом из двух каналов датчик положения ротора двигателя, соединенный со входами распределителя импульсов, поцклкненного выходами ко входам усилителя мощности через элементы И, отличающееся тем, что, с целью повышения точности синхронизации и расширения диапазона изменения соотношения скоростей двигателей, каждый из двух каналов дополнительно содержит масштабный усилитель с регулируемым коэффициентом усиления, элемент памяти, формирователь импульсов, инвертирующий и суммирующий усилители, а также общие для обоих каналов инвертор, компаратор и элемент ИЛИ, связанный двумя входами с выходами масштабных усилителей через формирователи импульсов, а выходом - с управляющим входом ачементов памяти обоих каналов, подключенных своими сигнальными входами к выходам соответствующих масштабных усилителей, входы которых соединены с выходами датчиков и первыми входами суммирующих усилителей, связанных вторыми входами через инвертирующие усилители с выходами элементов памяти, а выходами- с двумя входами компаратора, подключенного своим выходом ко вторым входам элементов И одного канала непосредственно, а второго - через инвертор. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 415645, кл. G 05 d 13/02, 1971. 2.Авторское свидетельство СССР № 493886, кл. Н 02 Р 7/60, 1075 (прототип).
19
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1098099A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1784944A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления шаговым двигателем | 1976 |
|
SU738092A1 |
| ШИРОКОДИАПАЗОННЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2227272C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАКОПИТЕЛЕМ УТОЧНОЙ НИТИ | 2001 |
|
RU2206489C1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |

2
}
Д1
1F1
/РД
JPIIl
PIV
Myf
MtfZ
ffKtil tpHUZ EfpHU
Г2
i
jt
t
t
Г
г7
