Изобретение относится к машиностроению и может быть использовано в трансмиссиях тракторов и автомобилей.
В сельскохозяйственных тракторах все большее распространение получают бесступенчатые объемные гидромеханические передачи (далее ОГМП), в которых часть мощности передается объемным приводом через гидромашины (далее ГМ), а остальная мощность - механическим путем.
Наиболее перспективными с точки зрения экономичности являются ОГМП, созданные на основе четырехзвенных планетарных механизмов. Любой четырехзвенный планетарный механизм формируется на основе двух трехзвенных планетарных механизмов и состоит из двух соединенных звеньев и двух отдельных звеньев. Попарное соединение или попарная кинематическая связь одного звена каждого из двух трехзвенных планетарных механизмов образует соединенное звено. Организация вращения ОГМП, содержащей четырехзвенный планетарный механизм, настройка согласованной работы звеньев позволяет решать задачи, обеспечивающие достижение высоких технических характеристик трактора.
Известен способ организации вращения ОГМП, содержащей входной и выходной валы, две гидравлически связанные регулируемые гидромашины и четырехзвенный планетарный механизм, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье звено - с валом регулируемой с параметром 0…+1 первой ГМ, четвертое звено - с валом регулируемой с параметром +1…0 второй ГМ.
(«Объемные гидромеханические передачи» Расчет и конструирование под ред. проф. Кисточкина - Л.: Машиностроение, 1987, 97, рис.4.2).
Согласно известному способу увеличение оборотов выходного вала от минимальных до максимальных в заданных пределах организуют путем поддержания постоянными оборотов входного вала и, поочередно меняя параметры регулирования первой ГМ с +1 до 0 и второй ГМ с 0 до +1, изменяют относительные обороты первой ГМ с - 1 до 0, а второй ГМ - с 0 до+1. Уменьшение оборотов выходного вала в заданных пределах организуют, изменяя параметры и обороты ГМ в обратном порядке.
На фиг.1 известный способ (далее иные способы) проиллюстрирован применительно к работе ОГМП сельскохозяйственного трактора с мощностью N двигателя 120 л.с., который кинематически связан с входным валом ОГМП, при диапазоне рабочих скоростей V трактора 5-15 км/ч,
где  - относительные обороты входного вала - первого звена четырехзвенного планетарного механизма ОГМП;
- относительные обороты входного вала - первого звена четырехзвенного планетарного механизма ОГМП;
 - относительные обороты выходного вала - второго звена;
- относительные обороты выходного вала - второго звена;
 - относительные обороты первой ГМ - третьего звена;
- относительные обороты первой ГМ - третьего звена;
 - относительные обороты второй ГМ - четвертого звена;
- относительные обороты второй ГМ - четвертого звена;
I - мощность N двигателя, л.с.;
II - мощность Nr, передаваемая объемным приводом, л.с.;
 - относительные обороты валов, звеньев;
- относительные обороты валов, звеньев;
v - скорость трактора, км/ч.
Для увеличения скорости трактора - оборотов выходного вала - с 5 до 8,6 км/ч без изменения оборотов входного вала изменяют параметр регулирования второй ГМ с 0 до+1 с увеличением ее относительных оборотов - с 0 до +0,36, а параметр регулирования первой ГМ поддерживают постоянным и равным +1 с изменением ее оборотов  с -1 до -0,63. Для увеличения скорости трактора с 8,6 км/ч до 15 км/ч (оборотов выходного вала
с -1 до -0,63. Для увеличения скорости трактора с 8,6 км/ч до 15 км/ч (оборотов выходного вала  ) уменьшают параметр регулирования первой ГМ с+1 до 0 с увеличением ее относительных оборотов с -0,63 до 0, а параметр регулирования второй ГМ поддерживают постоянным и равным +1 с изменением относительных оборотов
) уменьшают параметр регулирования первой ГМ с+1 до 0 с увеличением ее относительных оборотов с -0,63 до 0, а параметр регулирования второй ГМ поддерживают постоянным и равным +1 с изменением относительных оборотов  с +0,36 до +1. При реализации известного способа при скорости трактора 8,6 км/ч мощность Nг, передаваемая объемным приводом, достигает максимума 32,2 л.с., когда объемный привод имеет наибольшую производительность при параметрах регулирования обеих ГМ, равных единице. При краевых значениях рабочих скоростей 5 и 15 км/ч обороты первой и второй ГМ равны нулю. В диапазоне рабочих скоростей трактора 6-12 км/ч средняя мощность
с +0,36 до +1. При реализации известного способа при скорости трактора 8,6 км/ч мощность Nг, передаваемая объемным приводом, достигает максимума 32,2 л.с., когда объемный привод имеет наибольшую производительность при параметрах регулирования обеих ГМ, равных единице. При краевых значениях рабочих скоростей 5 и 15 км/ч обороты первой и второй ГМ равны нулю. В диапазоне рабочих скоростей трактора 6-12 км/ч средняя мощность
Nг, передаваемая объемным приводом, составляет 26,6 л.с.
Представленные на фиг.1 данные выявляют существенные недостатки известного способа организации вращения ОГМП: не используется «площадка» постоянной мощности двигателя, на которой мощность сохраняется постоянной при снижении оборотов двигателя примерно на одну четверть; не полностью используются потенциальные возможности ГМ; невозможно разогнать трактор без переключения режимов с помощью дополнительного механизма.
Наиболее близким является способ организации вращения ОГМП, содержащей входной и выходной валы, две гидравлически связанные ГМ и четырехзвенный планетарный механизм, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье звено - с нерегулируемой ГМ, четвертое звено - с регулируемой с параметром -1…0…+1 ГМ.
(«Объемные гидромеханические передачи» Расчет и конструирование под ред. проф. Кисточкина. - Л.: Машиностроение, 1987, 97, рис.4.2).
Известный способ проиллюстрирован на фиг.2.
Согласно известному способу увеличение оборотов выходного вала от минимальных до максимальных в заданных пределах организуют путем поддержания постоянными оборотов  входного вала и, меняя параметр регулирования регулируемой ГМ в вышеуказанных пределах -1…0…+1, синхронно изменяют относительные обороты регулируемой ГМ от 0,58 до +1 и нерегулируемой ГМ с -0,58 до +1. Уменьшение оборотов выходного вала в заданных пределах организуют, изменяя параметры и обороты ГМ в обратном порядке. При реализации известного способа краевые значения мощности Nr, передаваемой объемным приводом, составляют -46 л.с. и 69 л.с. В диапазоне рабочих скоростей трактора 6-12 км/ч средняя мощность Nг, передаваемая объемным приводом, составляет 26,9 л.с. Отрицательные значения мощности, передаваемой объемным приводом, означают наличие циркулирующей мощности, создающей некоторую дополнительную нагрузку в звеньях механизма. Однако объемный привод с одной регулируемой ГМ имеет меньшую массу и стоимость, а также более прост в управлении.
входного вала и, меняя параметр регулирования регулируемой ГМ в вышеуказанных пределах -1…0…+1, синхронно изменяют относительные обороты регулируемой ГМ от 0,58 до +1 и нерегулируемой ГМ с -0,58 до +1. Уменьшение оборотов выходного вала в заданных пределах организуют, изменяя параметры и обороты ГМ в обратном порядке. При реализации известного способа краевые значения мощности Nr, передаваемой объемным приводом, составляют -46 л.с. и 69 л.с. В диапазоне рабочих скоростей трактора 6-12 км/ч средняя мощность Nг, передаваемая объемным приводом, составляет 26,9 л.с. Отрицательные значения мощности, передаваемой объемным приводом, означают наличие циркулирующей мощности, создающей некоторую дополнительную нагрузку в звеньях механизма. Однако объемный привод с одной регулируемой ГМ имеет меньшую массу и стоимость, а также более прост в управлении.
Представленные на фиг.2 данные выявляют существенные недостатки известного способа организации вращения ОГМП: не используется «площадка» постоянной мощности двигателя, на которой мощность сохраняется постоянной при снижении оборотов двигателя примерно на одну четверть; при скорости движения трактора 5 км/ч используется только 0,58 потенциальных возможностей ГМ; невозможно разогнать трактор без переключения режимов с помощью дополнительного механизма.
Задачей изобретения является создание способа организации вращения ОГМП, позволяющего эффективно использовать «площадку» мощности снижающего обороты двигателя и полностью использовать потенциальные возможности ГМ.
Техническим результатом изобретения является уменьшение мощности, передаваемой гидроприводом, уменьшение потерь в гидроприводе с повышением коэффициента полезного действия (кпд) ОГМП в целом, уменьшение массы и стоимости ГМ, обеспечение непрерывного разгона трактора с места для последующей работы в диапазоне рабочих скоростей.
Сущность способа организации вращения объемной гидромеханической передачи, содержащей входной и выходной валы, две гидравлически связанные гидромашины и четырехзвенный планетарный механизм, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье звено - с нерегулируемой гидромашиной, четвертое звено - с регулируемой гидромашиной, путем изменения ее параметра регулирования от -1 до +1, причем обороты регулируемой гидромашины поддерживают постоянными, относительные обороты нерегулируемой гидромашины изменяют от -1 до +1, обороты выходного вала увеличивают от нуля до максимальных, обороты входного вала увеличивают в 1,6-2 раза до максимальных.
Способ по изобретению проиллюстрирован на фиг.3, где дополнительно  - верхняя граница зоны оптимальных относительных оборотов входного вала - первого звена.
- верхняя граница зоны оптимальных относительных оборотов входного вала - первого звена.
При стоящем тракторе (обороты выходного вала равны нулю) и работающем без нагрузки двигателе обороты  входного вала ОГМП составляют 0,5-0,625 от максимальных, а обороты нерегулируемой ГМ и обороты регулируемой ГМ максимальны и составляют -1 и +1 соответственно при величине параметра регулирования регулируемой ГМ -1. Обороты регулируемой ГМ поддерживают постоянными при всех режимах работы ОГМП и трактора. Для трогания трактора с места изменяют параметр регулирования регулируемой ГМ в сторону увеличения и, уменьшая обороты нерегулируемой ГМ, синхронно увеличивают обороты двигателя и обороты выходного вала, кинематически связанного с колесами. При дальнейшем увеличении параметра регулирования регулируемой ГМ увеличивают обороты выходного вала, а обороты нерегулируемой ГМ уменьшают и при скорости движения 7,5 км/ч устанавливают равными нулю, после чего, изменив направление, увеличивают с увеличением скорости. При скорости трактора 15 км/ч обороты входного и выходного валов, а также обороты нерегулируемой и регулируемой ГМ устанавливают максимальными и равными +1, причем увеличение оборотов входного вала составляет 1,6-2 раза до максимальных.
входного вала ОГМП составляют 0,5-0,625 от максимальных, а обороты нерегулируемой ГМ и обороты регулируемой ГМ максимальны и составляют -1 и +1 соответственно при величине параметра регулирования регулируемой ГМ -1. Обороты регулируемой ГМ поддерживают постоянными при всех режимах работы ОГМП и трактора. Для трогания трактора с места изменяют параметр регулирования регулируемой ГМ в сторону увеличения и, уменьшая обороты нерегулируемой ГМ, синхронно увеличивают обороты двигателя и обороты выходного вала, кинематически связанного с колесами. При дальнейшем увеличении параметра регулирования регулируемой ГМ увеличивают обороты выходного вала, а обороты нерегулируемой ГМ уменьшают и при скорости движения 7,5 км/ч устанавливают равными нулю, после чего, изменив направление, увеличивают с увеличением скорости. При скорости трактора 15 км/ч обороты входного и выходного валов, а также обороты нерегулируемой и регулируемой ГМ устанавливают максимальными и равными +1, причем увеличение оборотов входного вала составляет 1,6-2 раза до максимальных.
Уменьшение оборотов выходного вала и его остановку (остановку трактора) организуют, изменяя параметры и обороты ГМ, а также оборотов входного вала, в обратном порядке.
Из данных на фиг.3 следует, что при краевых значениях параметра регулирования ±1 обе ГМ могут иметь наибольшие возможные регламентируемые изготовителем обороты, т.е. их потенциальные возможности используются полностью.
Оптимальные значения оборотов входного вала находятся между линиями и  (при снижении оборотов двигателя с наибольших на одну четверть). При остановке трактора обороты двигателя будут соответственно снижаться в 2 и 1,6 раза. Такой выбор позволяет получить площадку постоянной мощности соответственно в диапазоне 7,5-15 км/ч и 5-15 км/ч при снижении оборотов двигателя на одну четверть.
(при снижении оборотов двигателя с наибольших на одну четверть). При остановке трактора обороты двигателя будут соответственно снижаться в 2 и 1,6 раза. Такой выбор позволяет получить площадку постоянной мощности соответственно в диапазоне 7,5-15 км/ч и 5-15 км/ч при снижении оборотов двигателя на одну четверть.
Снижение оборотов двигателя меньше, чем в 1,6 раза, нецелесообразно, т.к. увеличивается мощность Nг, передаваемая объемным приводом, а реализовать мощность двигателя при работе на скоростях менее 7,5 км/ч без отбора мощности невозможно (для принятого в нашем примере характере загрузки двигателя, когда мощность двигателя достигает максимума 120 л.с. при скорости 7,5 км/ч, соответствующая касательная сила тяги составила 4320 кг - фактически больше, чем должен развивать сельскохозяйственный трактор средней мощности). Снижение оборотов больше, чем в 2 раза, неприемлемо, т.к. не обеспечивается отбора мощности при остановке трактора и ограничивается площадка постоянной мощности для работы трактора на транспорте и для автомобиля.
В диапазоне наиболее употребимых рабочих скоростей 6-12 км/ч мощность, передаваемая объемным приводом по изобретению, получилась в среднем почти в 2 раза меньше соответствующей мощности по известному способу (фиг.1), который считают самым экономичным. Использование в способе по изобретению регулируемой и нерегулируемой ГМ позволяет уменьшить массу и стоимость ГМ.
Любое устройство четырехзвенного планетарного механизма ОГМП, которое обеспечивает вращение звеньев ОГМП согласно изобретению, дает передаваемую объемным приводом мощность в указанных пределах. Принятые в примерах самые маленькие ГМ (28 см3/об) типоразмерного ряда фирмы Rexroth обеспечивают разгон трактора с места и его работу в диапазоне рабочих скоростей в пределах регламентируемых фирмой параметров.
Для известных способов организации вращения ОГМП потребовались бы ГМ в 2-3 раза большего объема и с необходимостью сложного и «трудно доводимого» переключения на ходу режимов работы.
Вышеизложенное подтверждает достижение технического результата в части уменьшения мощности, передаваемой гидроприводом, уменьшение потерь в гидроприводе с повышением коэффициента полезного действия (кпд) ОГМП в целом, уменьшение массы и стоимости ГМ.
Известен четырехзвенный планетарный механизм ОГМП, первое звено которого - соединенное водило - кинематически связано с входным валом, второе звено - коронная шестерня - с выходным валом, третье и четвертое звено - со связанными сцепляющимися сателлитами солнечными шестернями с разным числом зубьев, которые кинематически связаны соответственно с одной из двух регулируемых с параметром 0…+1 ГМ.
(RU 2238457 C1, F16H 7/04, 2004).
Устройство такого известного четырехзвенного планетарного механизма в ОГМП с двумя регулируемыми ГМ предназначено для осуществления способа организации вращения (см. фиг.1). Однако данное устройство не обеспечивает полное использование потенциальных возможностей ГМ и возможности разогнать трактор с места без переключения режимов с помощью дополнительного механизма, что создает сложности в доводке ОГММ в целом и приводит к существенным материальным затратам. При работе трактора в диапазоне рабочих скоростей 6-12 км/ч средняя мощность Nг, передаваемая гидроприводом известного механизма, составляет 26,6 л.с. при мощности двигателя N 120 л.с.
Задачей изобретения является разработка четырехзвенного планетарного механизма в полной мере реализующего возможности способа организации вращения ОГМП по изобретению.
Техническим результатом изобретения является уменьшение мощности, передаваемой гидроприводом ОГМП, уменьшение потерь в гидроприводе с повышением коэффициента полезного действия (кпд) ОГМП в целом, уменьшение массы и стоимости ГМ, обеспечение непрерывного разгона трактора с места и его работу в диапазоне рабочих скоростей, а также обеспечение трактора вторым выходным валом постоянных оборотов при изменяющихся оборотах двигателя.
Сущностью четырехзвенного планетарного механизма объемной гидромеханической передачи, содержащей входной и выходной валы и две гидравлически связанные гидромашины, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье и четвертое звенья - с гидромашинами, является то, что третье звено четырехзвенного планетарного механизма кинематически связано с гидромашиной, выполненной нерегулируемой, четвертое звено - с гидромашиной, выполненной регулируемой с параметром регулирования -1…0…+1, а отношение передаточного числа от четвертого звена к первому звену при остановленном втором звене к передаточному числу от четвертого звена к первому звену при остановленном третьем звене составляет 1,3-1,5. Кроме того, четырехзвенный планетарный механизм объемной гидромеханической передачи дополнительно содержит второй выходной вал постоянных оборотов, кинематически связанный с регулируемой гидромашиной.
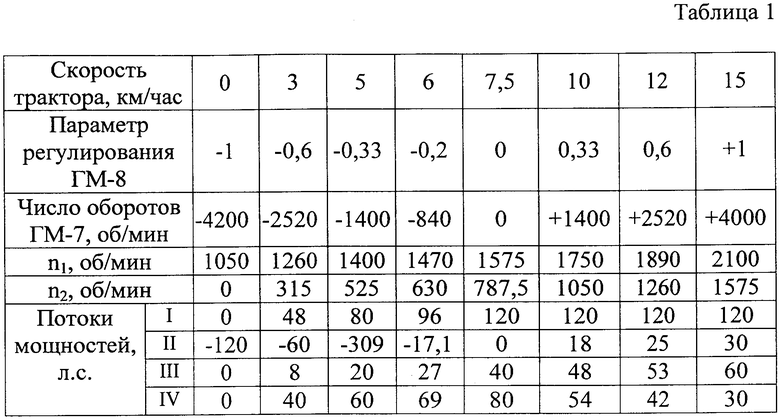
Все представленные ниже устройства работают в условиях, определенных способом организации вращения ОГМП по изобретению, когда обороты входного вала увеличиваются в 1,6-2 раза при увеличении скорости трактора от нуля до наибольшей - 15 км/ч и приняты 2100 об/мин. Обороты регулируемой ГМ приняты постоянными и равными 4200 об/мин; параметр ее регулирования меняется от -1 до +1, поэтому обороты нерегулируемой ГМ меняются от -4200 об/мин до +4200 об/мин. Также, согласно фиг.3, в соответствии со способом организации вращения ОГМП меняется мощность двигателя по линиям I и мощность, передаваемая объемным приводом по кривым II и II'.
Любой четырехзвенный планетарный механизм по изобретению сформирован на основе двух трехзвенных планетарных механизмов и состоит из двух соединенных звеньев и двух отдельных звеньев. Попарное соединение или попарная кинематическая связь одного звена каждого из двух трехзвенных планетарных механизмов образует соединенное звено. С каждым звеном кинематически связан один из четырех валов, которым ниже присвоены номера, соответствующие номерам звеньев. Кинематическая связь достигается путем закрепления элемента звена на валу и/или присоединением элементов звена к валу с помощью согласующей передачи.
Изобретение проиллюстрировано примерами, представленными на фиг.4 - 9 и таблицах 1, 2 и 3, где
1 - входной вал ОГМП;
2 - выходной вал ОГМП;
3 - вал нерегулируемой ГМ (только для фиг.9);
4 - вал регулируемой ГМ (только для фиг.9);
5 - трехзвенный планетарный механизм со стороны входного вала;
6 - трехзвенный планетарный механизм со стороны выходного вала;
7 - нерегулируемая ГМ;
8 - регулируемая ГМ;
9 - согласующая передача привода нерегулируемой ГМ-7;
10 - согласующая передача привода регулируемой ГМ-8;
11 - водило трехзвенного планетарного механизма 5;
12 - сателлит трехзвенного планетарного механизма 5;
13 - солнечная шестерня трехзвенного планетарного механизма 5;
14 - коронная шестерня трехзвенного планетарного механизма 5;
15 - водило трехзвенного планетарного механизма 6;
16 - сателлит трехзвенного планетарного механизма 6;
17 - солнечная шестерня трехзвенного планетарного механизма 6;
18 - коронная шестерня трехзвенного планетарного механизма 6;
19 - согласующая передача между входным валом и водилом планетарного механизма 6 (только для фиг.9).
n1 - число оборотов входного вала;
n2 - число оборотов выходного вала;
i4,1 - передаточное число от четвертого звена к первому звену, когда n2=0;
i'4,1 - передаточное число от четвертого звена к первому звену когда n3=0;
i9, i10 - передаточные числа согласующих передач 9 и 10;
К5, К6 - отношение числа зубьев коронной шестерни к числу зубьев солнечной шестерни трехзвенных планетарных механизмов 5 и 6;
Соотношения диаметральных размеров всех шестерен планетарных и согласующих передач на фиг.4-13 выполнены примерно в одном масштабе.
Пример 1 (фиг.4).
Первое звено выполнено отдельным и включает водило 15 с сателлитами 16, закрепленное на входном валу 1. Второе звено выполнено соединенным и включает коронную шестерню 18 и водило 11 с сателлитами 12, закрепленные на выходном валу. Третье звено выполнено отдельным и включает коронную шестерню 14, кинематически связанную согласующей передачей 9 с нерегулируемой ГМ-7. Четвертое звено выполнено соединенным и включает солнечные шестерни 13 и 17, кинематически связанные согласующей передачей 10 с регулируемой ГМ-8.
К5=3; К6=2; i9=4; i10=4/3.
Пример 2 (фиг.5).
Первое звено выполнено соединенным и включает коронную шестерню 14 и водило 15 с сателлитами 16, закрепленные на входном валу 1. Второе звено выполнено отдельным и включает водило 11 с сателлитами 12, закрепленные на выходном валу 2. Третье звено выполнено соединенным и включает солнечные шестерни 13 и 17, кинематически связанные согласующей передачей 9 с нерегулируемой ГМ-7. Четвертое звено выполнено отдельным и включает коронную шестерню 18, кинематически связанную согласующей передачей 10 с регулируемой ГМ-8.
К5=2; К6=3; i9=2; i10=2.
Пример 3 (фиг.6).
Первое звено выполнено соединенным и включает водило 11 с сателлитами 12 и солнечную шестерню 17, закрепленные на входном валу 1. Второе звено выполнено отдельным и включает водило 15 с сателлитами 16, закрепленные на выходном валу 2. Третье звено выполнено соединенным и включает коронные шестерни 14 и 18, кинематически связанные согласующей передачей 9 с нерегулируемой ГМ-7. Четвертое звено выполнено отдельным и включает солнечную шестерню 13, кинематически связанную согласующей передачей 10 с регулируемой ГМ-8.
К5=58/26; К6=58/26; i9=7,23; i10=1/1,31.
Пример 4 (фиг.7).
Первое звено выполнено отдельным и включает водило 11 с сателлитами 12, закрепленное на входном валу 1. Второе звено выполнено соединенным и включает солнечную шестерню 13 и водило 15 с сателлитами 16, закрепленные на выходном валу 2. Третье звено выполнено отдельным и включает солнечную шестерню 17, кинематически связанную согласующей передачей 9 с нерегулируемой ГМ-7. Четвертое 4 звено выполнено соединенным и включает коронные шестерни 14 и 18, кинематически связанные согласующей передачей 10 с регулируемой ГМ-8.
К5=58/26; К6=58/26; i9=1,3; i10=2,24.
Пример 5 (фиг.8).
Первое звено выполнено отдельным и включает коронную шестерню 14, закрепленную на входном валу 1. Второе звено выполнено соединенным и включает водило 11 с сателлитами 12 и водило 15 с сателлитами 16, закрепленное на выходном валу 2. Третье звено выполнено соединенным и включает солнечные шестерни 13 и коронную шестерню 18, кинематически связанные согласующей передачей 9 с нерегулируемой ГМ-7. Четвертое звено выполнено отдельным и включает солнечную шестерню 17, кинематически связанную согласующей передачей 10 с регулируемой ГМ-8.
К5=1,5; К6=1,5; i9=2,67; i10=1,78.
Пример 6 (фиг.9).
В устройстве в качестве трехзвенного планетарного механизма 6 применен симметричный (К6=1) дифференциал со сцепленными сателлитами, аналогичные в принципе дифференциалу ведущего моста автомобиля или трактора.
Первое звено выполнено отдельным и включает водило 11 с сателлитами 12, закрепленное на входном валу 1. Второе звено выполнено соединенным и включает коронную шестерню 14, закрепленную на выходном валу 2, который согласующей передачей 19 кинематически также связан с водилом 15 со сцепленными сателлитами 16. Третье звено выполнено отдельным и включает полуосевую шестерню 20, закрепленную на валу 3 нерегулируемой ГМ-7. Четвертое звено выполнено соединенным и включает солнечную шестерню 13, кинематически связанную согласующей передачей 10 с валом 4 регулируемой ГМ-8, на котором закреплена полуосевая шестерня 17.
К5=2; К6=1; i10=1,33; i19=2,67;
i'10=1,07; i'19=3,55.
Работу всех вышеупомянутых устройств нагляднее всего проиллюстрировать на этом примере, т.к. здесь, во-первых, обороты выходного вала в i19 раз меньше «привычной» полусуммы оборотов полуосевых шестерен 17 и 20 (равной n15); во-вторых, это устройство «гибкое»: можно не меняя К5 и К6 выполнить согласующие передачи как с передаточными числами i10=1,33; i19=2,67, так и с i'10=1,07; i'19=3,55.
Согласно таблице 1, когда i10=1,33; i19=2,67, при увеличении параметра регулирования ГМ-8 от -1 до +1 обороты выходного вала 2 увеличиваются от 0 до 1575 об/мин, что соответствует увеличению скорости трактора от 0 до 15 км/ч. При этом обороты n1 входного вала 1 (двигателя) будут синхронно увеличиваться от 1050 об/мин (при постоянных оборотах 3150 об/мин солнечной шестерни 13 и неподвижной коронной шестерне 14) до 2100 об/мин - скорость трактора 15 км/ч, когда планетарная передача 6 вращается как одно целое.
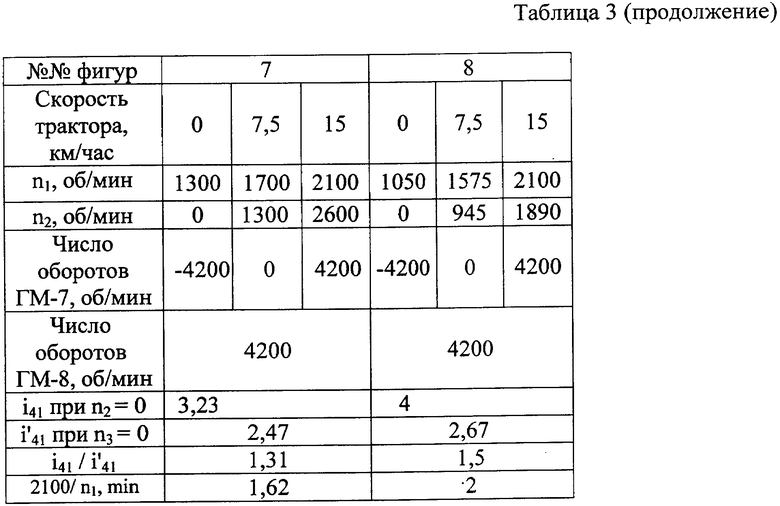
Устройство на фиг.9 работает в соответствии со способом по изобретению: при стоящем тракторе i4,1=4, при остановленной ГМ-7 i'4,1=2,666; а их отношение i4,1/i'4,1=1,5 при увеличении оборотов двигателя до максимальных в 2 раза.
Когда скорость трактора меньше 7,5 км/ч (фиг.10), подведенная к водилу 11 мощность делится на два потока III и IV. При известных оборотах водила 11, солнечной шестерни 13 и коронной шестерни 14 моменты на них в 3 и 1,5 раза меньше, чем на водиле. Отсюда определяются (без учета потерь) чисто механические потоки мощности III и IV. Поток мощности II, передаваемый объемным приводом, в данном случае циркулирует от ГМ-7 к ГМ-8. Гидромашина ГМ-7 работает в режиме насоса (подтормаживает полуосевую шестерню 20 и подкручивает выходной вал 2). Передаваемая объемным приводом мощность от работающего в режиме мотора ГМ-8 через полуосевые шестерни 17 и 20, а также сцепленные сателлиты 16 возвращается обратно к ГМ-7 (циркулирует). Для современного трактора при трогании с места величина потока III мощности 120 л.с. нехарактерна, т.к., как правило, разгон начинается при выглубленных сельскохозяйственных орудиях, когда потребная сила тяги составляет около 1000 кг; для плавного разгона требуется еще примерно 1000 кг, что намного меньше упомянутой располагаемой силы тяги 4320 кг.
При скорости трактора 3 км/ч через около 0,4 с при плавном разгоне трактор переместится примерно на 0,2 м; если сцепка натянется, гидравлическая мощность снизится до 60 л.с. При скорости трактора 5 км/ч она снизится до 30 л.с. При скорости трактора 7,5 км/ч вся мощность двигателя передается только потоками III и IV.
Когда параметр регулирования ГМ-8 станет больше нуля, характер потоков мощности меняется (фиг.11). Теперь в режиме насоса работает ГМ-8. Мощность двигателя делится на потоки III, IV и II.
Гидравлический поток мощности II соответствует кривой II на фиг.3. В представленном устройстве при известных оборотах ГМ-7 и выходного вала 2 его нетрудно определить по приведенной к валу 3 разности внешнего момента на выходном валу 2 и момента на коронной шестерне 14.
Если применить другие согласующие передачи i'10=1,07 и i'19=3,55, то устройство на фиг.9 будет работать в соответствии с данными таблицы 2. Здесь обороты двигателя увеличиваются в 1,6 раза и n1 изменяется от 1312 до 2100 об/мин. При скорости движения трактора 15 км/ч мощность, передаваемая объемным приводом, увеличивается до 37,5 л.с., а мощность III, предаваемая чисто механическим путем, снижается с 60 л.с. до 45 л.с. При стоящем тракторе i4,1=3,2 при остановленной ГМ-7
i'4,1=2,46, а их отношение i4,1/i'4,1=1,3. Таким образом, четырехзвенный планетарный механизм, представленный на фиг.9, может работать в пределах оптимальной зоны оборотов входного вала (двигателя), обозначенной линиями ω1 и ω1' на фиг.3.
Особенностью данного устройства является то, что значительный поток мощности IV передается через обе согласующие передачи, при этом несколько повышаются механические потери.
Как следует из таблицы 3, представленное в примере 1 устройство (фиг.4) по кинематике не отличается от устройства в примере 6. Это объясняется тем, что соединенные и отдельные звенья крепятся к одним и тем же валам. Поэтому все потоки мощностей количественно соответствуют табл.1 и 2. Однако соединение коронной шестерни 18 к водилу 11 в устройстве на фиг.4 выполнено минуя согласующие передачи, поэтому механические потери в нем будут несколько меньше.
Представленное в примере 2 устройство (фиг.5) «зеркально» предыдущему, но в данном случае ГМ-7 и ГМ-8 поменялись местами. Поэтому при том же снижении оборотов двигателя в 2 раза кинематика изменилась: это устройство вращается как одно целое при скорости движения трактора 15 км/ч.
Представленные в примерах 3 (фиг.6) и 4 (фиг.7) устройства тоже «зеркальны», но здесь удалось подобрать трехзвенные планетарные механизмы с одинаковыми характеристиками. Отношение i4,1/i'4,1 в обоих устройствах составляет 1,31.
В представленном в примере 5 (фиг.8) устройстве удалось выполнить соединенное водило. Отношение i4,1/i'4,1 составляет 1,5.
Что касается потоков мощностей в примерах 2-5, то их направления и величины каждый раз зависят от способа кинематической связи соединенных и отдельных звеньев. Но при этом наибольшие и наименьшие значения передаваемой объемным приводом потоков мощности остается в пределах данных табл.1 и 2.
Все рассмотренные устройства имеют соосное расположение входного и выходного валов. Между тем большая часть трансмиссий современных тракторов имеет параллельное расположение входного и выходного валов. Несомненно, что представленные четырехзвенные планетарные механизмы по изобретению дают возможность конструктору подобрать или разработать устройство ОГМП для конкретного трактора или автомобиля. Если ОГМП надо разработать для возможности установки на место существующей механической коробки передач, то представленные устройства легко корреспондируются по соотношению оборотов входного и выходного валов.
В кораблях, самолетах и других объектах применяют передачи для поддержания постоянства оборотов агрегатов, например генератора трехфазного тока, при переменных оборотах основного двигателя. Если бы стоимость такого привода была приемлема для трактора или автомобиля, то он нашел бы широкое применение как для внутренних потребителей (например, привод воздуходувки системы охлаждения двигателя, усилителя рулевого управления, компрессора воздуходувки и т.д.), так и для внешних потребителей, например бетономешалки на автомобиле, и особенно для вала отбора мощности (далее ВОМ) трактора. ВОМ часто выполняют с выходными оборотами 540, 750, 1000, однако при включенном ВОМ менять обороты двигателя нельзя. Аналогов такого устройства нет.
При использовании ОГМП согласно изобретению несложно кинематически связать второй выходной вал со звеном регулируемой ГМ, имеющем постоянные обороты. В качестве примера на фиг.12 показано возможное выполнение трансмиссии трактора с ОГМП, приведенной в примере 1 (фиг.4),
где 20 - второй выходной вал;
21 - согласующая передача к валу 20 совместно с передачей 10;
22 - гидроподжимная муфта ВОМ;
23 - вал отбора мощности - ВОМ;
24 - узел переключения диапазонов реверса и замедлителя;
25 - каретка переключения рабочего и транспортного диапазонов;
26 - промежуточный трубчатый вал;
27 - каретка увеличения силы тяги;
28 - ускоряющая передача  всех диапазонов;
всех диапазонов;
29 - ускоряющая передача  транспортного диапазона;
транспортного диапазона;
30 - вал привода заднего моста.
Ниже общей оси валов 1 и 2 расположен второй выходной вал 20, кинематически связанный согласующей передачей 21 с четвертым соединенным звеном ОГМП. Гидроподжимная муфта ВОМ 22 позволяет осуществлять подлинно независимое включение-отключение вращающегося с постоянными оборотами ВОМ при любых оборотах двигателя (механизм переключения с 1000 на 545 об/мин не показан). При отборе мощности через ВОМ происходит перераспределение потоков мощности, при котором передаваемая объемным приводом мощность существенно снижается. Например, если при скорости 10 км/ч через ВОМ пойдет 72 л.с., то оставшиеся 48 л.с. пойдут потоком III, а потоки II и IV исчезнут (фиг.10 и табл.1). Существующие тракторы при включенном ВОМ не могут изменять обороты двигателя.
Переключение диапазонов в узле 24 и кареткой переключения 25 производится, когда трактор стоит. Рабочий диапазон включается «напрямую» перемещением каретки переключения 25 против движения трактора. При перемещении каретки переключения 25 по ходу трактора включается транспортный диапазон (до 50 км/ч). Сила тяги на транспортных работах в () раз меньше, чем при полевых работах. Перед троганием с места на транспортных работах включается каретка увеличения силы тяги 27. Это позволяет при выбранных () передачах 21 и 29, кратковременно включив муфту 22, развить суммарную силу тяги более 2500 кг. По мере разгона ее буксование уменьшается. Когда скорость трактора достигнет 12-15 км/ч, гидроподжимная муфта 22 выключается. Каретка увеличения силы тяги 27 может оставаться включенной до завершения транспортных работ.
Таким образом, независимо от того, какое из четырех звеньев планетарного механизма в составе ОГМП, работающей по способу организации вращения по данному изобретению, кинематически связано с одним из валов или гидромашин, все четырехзвенные планетарные механизмы по изобретению, представленные в примерах 1-6, являются работоспособными и обеспечивают достижение поставленного технического результата.


| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2007 |
|
RU2335414C1 |
| ОБЪЕМНАЯ ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2269707C1 |
| ОБЪЕМНАЯ ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2010 |
|
RU2444660C1 |
| ДВУХПОТОЧНЫЙ ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА | 2012 |
|
RU2506175C1 |
| Трансмиссия транспортного средства | 1988 |
|
SU1539116A1 |
| ГИДРООБЪЕМНО-МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ПЛАНЕТАРНОГО ТИПА ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2045416C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2298125C1 |
| МЕХАНИЗМ ПЕРЕДАЧ И ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2236356C2 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ДВУХ ДИФФЕРЕНЦИАЛЬНЫХ МЕХАНИЗМОВ | 2013 |
|
RU2555583C2 |
| Гидромеханическая передача для транспортной машины | 1971 |
|
SU449832A1 |
Изобретение относится к машиностроению. Объемная гидромеханическая передача (ОГМП) содержит входной и выходной валы, две гидравлически связанные гидромашины (ГМ) и четырехзвенный планетарный механизм. Первое звено четырехзвенного планетарного механизма кинематически связано с входным валом, второе - с выходным валом, третье - с нерегулируемой ГМ, четвертое - с регулируемой ГМ путем изменения ее параметра регулирования от -1 до +1. Обороты регулируемой гидромашины поддерживают постоянными, относительные обороты нерегулируемой гидромашины изменяют от -1 до +1. Обороты выходного вала увеличивают от нуля до максимальных, обороты входного вала увеличивают в 1,6-2 раза до максимальных. Отношение передаточных чисел от четвертого звена к первому звену при остановленных втором и третьем звеньях в четырехзвенном планетарном механизме составляет 1,3-1,5. Это позволяет улучшить эксплуатационные характеристики устройства. 2 н. и 1 з.п. ф-лы, 12 ил., 3 табл.
1. Способ организации вращения объемной гидромеханической передачи, содержащей входной и выходной валы, две гидравлически связанные гидромашины и четырехзвенный планетарный механизм, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье звено - с нерегулируемой гидромашиной, четвертое звено - с регулируемой гидромашиной, путем изменения ее параметра регулирования от -1 до +1, отличающийся тем, что обороты регулируемой гидромашины поддерживают постоянными, относительные обороты нерегулируемой гидромашины изменяют от -1 до +1, обороты выходного вала увеличивают от нуля до максимальных, обороты входного вала увеличивают в 1,6-2 раза до максимальных.
2. Четырехзвенный планетарный механизм объемной гидромеханической передачи, содержащей входной и выходной валы и две гидравлически связанные гидромашины, первое звено которого кинематически связано с входным валом, второе звено - с выходным валом, третье и четвертое звенья - с гидромашинами, отличающийся тем, что третье звено кинематически связано с гидромашиной, выполненной нерегулируемой, четвертое звено - с гидромашиной, выполненной регулируемой с параметром регулирования -1…0…+1, а отношение передаточного числа от четвертого звена к первому звену при остановленном втором звене к передаточному числу от четвертого звена к первому звену при остановленном третьем звене составляет 1,3-1,5.
3. Четырехзвенный планетарный механизм объемной гидромеханической передачи по п.2, отличающийся тем, что дополнительно содержит второй выходной вал постоянных оборотов, кинематически связанный с регулируемой гидромашиной.
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2002 |
|
RU2238457C2 |
| Гидромеханическая передача | 1988 |
|
SU1569475A1 |
| US 4382392 А, 10.05.1983 | |||
| Способ стабилизации и сужения костно-хрящевого отдела спинки носа при структурной ринопластике | 2024 |
|
RU2832610C1 |

