Изобретение относится к области тракторного машиностроения, точнее к механизмам отбора мощности от двигателя трактора для привода разнообразных активных рабочих органов, агрегатируемых с тракторами прицепных или навесных сельскохозяйственных машин, в частности вращательного действия.
В известных в настоящее время машинотракторных агрегатах (МТА), как правило, мощность двигателя расходуется по двум направлениям: одна часть подводится к движителям: колесам или гусеницам трактора, другая - к валу отбора мощности (ВОМ) для привода орудия рабочей машины, но при этом при изменении частоты вращения коленчатого вала двигателя изменяется и скорость движения, и частота вращения ВОМ. Современные же требования к работе МТА, и ВОМ в частности, таковы, что управление скоростью трактора, предпочтительно, должно быть бесступенчатым, к тому же обеспечивать работу в режиме «топливной экономичности», но при этом не оказывать значительного влияния на технологическую частоту вращения ВОМ. Другими словами диапазон отклонений частоты вращения ВОМ в процессе работы МТА должен быть жестко ограничен и не зависеть от изменения частоты вращения коленвала двигателя трактора.
Из уровня техники известен привод независимого ВОМ (RU 2162798, 2001 г.), содержащий гидронасос и двухступенчатый редуктор. Первая ступень редуктора выполнена в виде трехзвенного дифференциального механизма, а вторая ступень - в виде планетарного ряда. Изменение (регулирование) частоты вращения ВОМ осуществляется регулировкой расхода насоса, воздействующего на солнечную шестерню первого планетарного ряда. К недостаткам такого привода следует отнести низкий КПД (реализована однопоточная схема с дроссельным регулированием), конструктивную усложненность редуктора, большие габариты, несовершенность управления, требующего ручной настройки.
Известен также привод ВОМ, выполненный по двухпоточной схеме в виде бесступенчато-регулируемой передачи с механическим фрикционным вариатором (RU 2411406, 2011 г.). Такой тип вариаторов не может передавать достаточно большую мощность, он плохо обеспечивает стабильность передаточных чисел, особенно в передачах с разделением потока мощности в области предельных передаточных чисел, например, при разгоне передачи; имеет нестабильный коэффициент трения, зависящий от меняющихся внешних условий; конструктивно сложен и, вследствие этого, малонадежен.
Наиболее близким аналогом (прототипом) изобретения является двухпоточный привод независимого ВОМ, в котором мощность на хвостовик ВОМ передается двумя потоками: механическим и гидравлическим (US 7207916, 2007 г.), содержащий дифференциальный планетарный механизм, объемный гидропривод с двумя гидромашинами, одна из которых регулируемая, а также ряд согласующих редукторов, муфту управления включением/выключением ВОМ, размещенную по оси коробки передач трактора, и контрольно-регулирующую аппаратуру с датчиком частоты вращения двигателя, датчиком частоты вращения вала отбора мощности и управляющим блоком. В нем мощность от двигателя передается через муфту включения/выключения ВОМ и после муфты делится на два потока: механический: мощность передается на входное звено планетарного механизма; и гидравлический, который реализуется совместной работой регулируемого гидронасоса и нерегулируемого гидромотора.
Для обеспечения максимального КПД при работе на номинальной частоте вращения двигателя или больше номинальной за счет передачи всей мощности только механическим путем в прототипе предусмотрен останов управляющего звена (солнечной шестерни) посредством обгонной муфты, которая препятствует его вращению в обратном направлении, но при этом регулирование скорости не происходит. Частота вращения на выходе ВОМ в прототипе поддерживается постоянной путем изменения частоты вращения управляющего звена гидромотором при работе трактора на корректорной ветви двигателя. Принципиальной особенностью работы данной схемы является то, что она рассчитана на обеспечение максимального КПД при работе в области номинальной частоты вращения двигателя. И при использовании двигателя для регулирования скорости трактора по мере снижения частоты вращения двигателя КПД привода ВОМ будет падать, т.к. гидравлическая составляющая в потоке передачи мощности будет расти, что следует отнести к недостатку прототипа. Другими недостатками прототипа является:
- отсутствие элемента, который останавливал бы ВОМ в случае, когда муфта его включения/выключения разомкнута - введение в схему тормоза ВОМ является обязательным требованием техники безопасности, так как исключает вращение ВОМ вследствие «ведения» муфты включения/выключения;
- применение обгонной муфты блокировки, поскольку такие муфты снижают эксплуатационную надежность конструкции, так как обладают небольшим ресурсом и вызывают значительные ударные нагрузки в процессе своей работы;
- моноблочное исполнение привода ВОМ в прототипе, как и в предыдущих аналогах, создает неудобства общего эксплуатационного характера, поскольку усложняет ремонт и/или обслуживание привода.
Задача, реализуемая предлагаемым изобретением, направлена на создание эффективного двухпоточного привода независимого ВОМ, обеспечивающего постоянную частоту вращения ВОМ во всем диапазоне работы двигателя с улучшенными при этом, по сравнению с прототипом, технико-экономическими показателями.
Технический результат, получаемый от реализации изобретения, состоит в повышении КПД привода ВОМ при работе на пониженных частотах вращения двигателя, а также в оптимизации рабочих параметров гидромашин, обеспечении компактности, снижения веса привода и улучшения его компоновки.
Для достижения заявленного технического результата привод вала отбора мощности от двигателя трактора через его механическую трансмиссию с коробкой передач, содержащий дифференциальный планетарный механизм, объемный гидропривод с двумя гидромашинами, одна из которых регулируемая, а также ряд согласующих редукторов, фрикционную муфту управления включением/выключением вала отбора мощности, размещенную по оси коробки передач, и контрольно-регулирующую аппаратуру с датчиком частоты вращения двигателя, датчиком частоты вращения вала отбора мощности и управляющим блоком, согласно изобретению, содержит тормоз вала отбора мощности и выполнен в виде раздельно-модульного агрегата, в котором дифференциальный планетарный механизм имеет корпус и скомпонован вместе с упомянутыми согласующими редукторами и коробкой передач трактора в единый модуль, размещенный в общем картере, а объемный гидропривод выполнен в виде двух отдельных модулей: модуля с регулируемой гидромашиной и модуля с нерегулируемой гидромашиной, установленных снаружи первого единого модуля, например на корпусе планетарного механизма, и при этом обе его гидромашины выполнены обратимыми, модуль с регулируемой гидромашиной соединен кинематически посредством соответствующего согласующего редуктора с муфтой управления включением/выключением вала отбора мощности или непосредственно с этим валом, а модуль с нерегулируемой гидромашиной также посредством соответствующего согласующего редуктора - с управляющим звеном планетарного механизма, например эпициклической шестерней.
Причем, конструктивно тормоз может быть совмещен с фрикционной муфтой включения/выключения в общем корпусе.
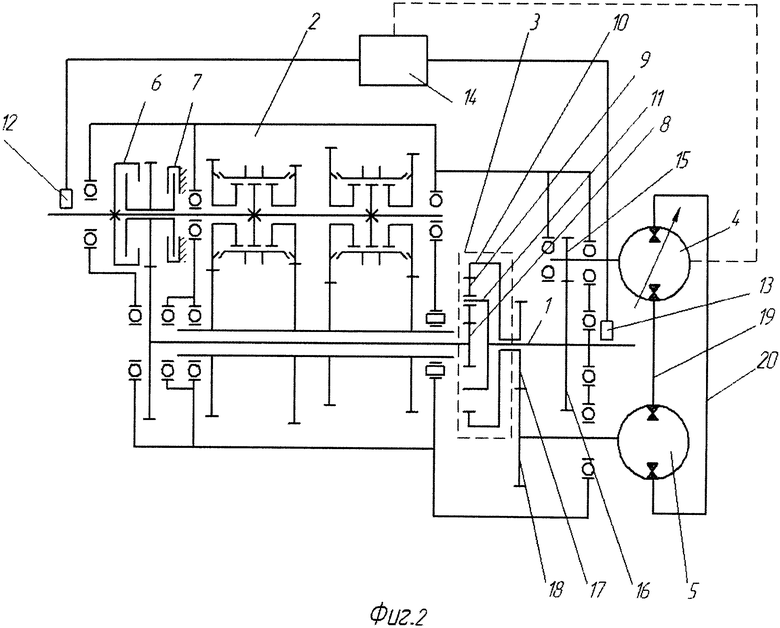
На фиг.1 представленных чертежей дан общий вид привода ВОМ с размещением регулируемой гидромашины на входе в планетарный механизм (схема); на фиг.2 - то же, с размещением регулируемой гидромашины на выходе из планетарного механизма.
Предлагаемый двухпоточный привод вала 1 отбора мощности (ВОМ) от двигателя трактора (условно не показаны) через его механическую трансмиссию с коробкой передач (КП) 2 содержит дифференциальный планетарный механизм 3, объемный гидропривод с двумя обратимыми гидромашинами: регулируемой 4 и нерегулируемой 5; муфту включения/выключения ВОМ 6, размещенную по оси КП 2 и тормоз ВОМ 7. В частном случае исполнения для обеспечения компактности привода муфта 6 и тормоз 7 объединены в общий узел. Известно, что для того, чтобы планетарный ряд передавал через себя мощность, он должен иметь входное, выходное и управляющее звенья. В конкретном примере предлагаемого привода в планетарном механизме 3 в качестве входного звена включает в себя солнечную шестерню 8, его сателлиты 9 входят в зацепление с солнечной шестерней 8 и, обкатываясь по эпициклической шестерне 10, выполняющей функции управляющего звена, передают вращение на выходное звено - водило 11. Возможно выполнение планетарного механизма 3 с иным распределением функций между солнечной шестерней, эпициклом и водилом.
Контрольно-регулирующая аппаратура содержит датчик 12 частоты вращения двигателя, датчик 13 частоты вращения ВОМ 1 и управляющий блок 14 с контрольно-считывающим устройством.
Схемное подключение и расположение регулируемой гидромашины 4 вариантно: она через согласующий редуктор ее привода, образованный шестернями 15 и 16, связана либо с муфтой 6 и располагается на входе в планетарный механизм 3 (когда согласующий редуктор располагается перед планетарным механизмом (Фиг.1)); либо также через согласующий редуктор непосредственно с валом 1 и располагается на выходе из планетарного механизма 3 (фиг.2, когда согласующий редуктор привода машины расположен после планетарного механизма).
Нерегулируемая гидромашина 5 расположена за планетарным механизмом 3 и через согласующий редуктор ее привода, образованный шестернями 17 и 18, всегда связана с управляющим звеном 10.
Схема с одновременным расположением машин 4 и 5 после планетарного механизма 3 (фиг.2) компактна за счет уменьшения протяженности гидролиний 19, 20.
Пояснение работы устройства дано на конкретном примере его исполнения в соответствии с фиг.1 - когда регулируемая машина 4 располагается на входе в планетарный механизм 3.
Во время работы МТА мощность от двигателя трактора передается через замкнутую муфту 6 одновременно на входное звено 8 планетарного ряда 3 и на согласующий редуктор привода регулируемой гидромашины 4. Далее мощность идет двумя потоками - механическим и гидравлическим. Первый (механический) поток мощности передается от двигателя на входное звено 8 планетарного механизма 3, а на управляющее (тормозное) звено 10 через согласующий редуктор, образованный шестернями 17 и 18, нерегулируемая гидромашина 5 передает второй поток мощности (гидравлический) от регулируемой гидромашины 4. При этом планетарный механизм 3 выполняет суммирующую роль, складывая потоки и передавая их на выходное звено 11.
Для обеспечения постоянной частоты вращения вала 1 при изменении частоты вращения двигателя осуществляется регулировка, выполняемая по сигналам с датчика 12 частоты вращения двигателя и с датчика 13 частоты вращения хвостовика ВОМ управляющим блоком 14, воздействующим непосредственно на регулируемую гидромашину 4, изменяя ее рабочий объем и направление потока жидкости.
При снижении частоты вращения ВОМ с целью ее увеличения до заданного параметра управляющий блок 14 воздействует на регулируемую гидромашину 4 таким образом, что ее входной вал вращается в направлении, обеспечивающем работу в режиме насоса. При этом нерегулируемая гидромашина 5 работает в режиме мотора, вращая управляющее звено 10 с моментом, большим, чем момент сопротивления на звене 10, в сторону, попутную вращению вала 1. В этом случае механический поток и гидравлический поток суммируются на планетарном механизме 3 и результирующая мощность передается на выходное звено 11 и на связанный с ним ВОМ 1. Постоянная частота вращения достигается за счет изменения гидравлической составляющей в суммарном потоке. Если нет необходимости изменять частоту вращения ВОМ 1, то управляющий блок 14 регулирует гидромашину 4 таким образом, чтобы момент на выходном валу нерегулируемой гидромашины 5 был равен моменту сопротивления на управляющем звене 10. В этом случае выходной вал нерегулируемой гидромашины 5 стоит и вся мощность передается через планетарный ряд 3 механическим путем, при этом достигается максимальный КПД.
При необходимости уменьшить частоту вращения выходного вала 1 регулируемая гидромашина 4 по сигналу от управляющего блока 14 изменяет направление потока жидкости и переходит в режим гидромотора. В этом случае момент на выходном валу нерегулируемой гидромашины 5 будет меньше, чем момент сопротивления на управляющем звене 10, которое будет вращаться в противоположном описанному ранее направлению, тем самым уменьшая частоту вращения выходного звена 11. В режиме уменьшения частоты вращения ВОМ регулировка реализуется за счет циркулирующей мощности.
В случае, когда работы с ВОМ не выполняются тормозом 7, необходимо остановить хвостовик ВОМ.
Для примера исполнения устройства в соответствии с фиг.2 - когда обе гидромашины 4 и 5 располагаются на выходе из планетарного механизма 3 -гидравлический поток образуется после планетарного механизма и регулируемая гидромашина 4 приводится в действие от хвостовика ВОМ 1 через согласующий редуктор, образованный шестернями 15 и 16, после планетарного механизма 3 и передает мощность через согласующий редуктор, образованный шестернями 17 и 18, на нерегулируемую гидромашину 5. Регулирование частоты вращения ВОМ 1 происходит по тому же принципу, описанному выше, только регулировка за счет циркуляции мощности реализуется при режиме увеличения частоты вращения ВОМ.
Одной из отличительных особенностей предлагаемого решения является выполнение гидромашин 4 и 5 обратимыми для передачи мощности и регулирования частоты вращения ВОМ. Применение гидромашин такого типа за счет своих свойств обеспечивает либо передачу мощности вторым потоком (в случае, когда надо увеличить частоту вращения ВОМ), либо отбор мощности за счет ее циркуляции (в случае, когда необходимо уменьшить частоту вращения ВОМ). Данная особенность позволяет вращаться управляющему звену 10 планетарного ряда в обоих направлениях, обеспечивая тем самым широкий диапазон регулирования скорости без применения дополнительных редукторов.
Причем выбор компоновочной схемы (с гидромашинной на входе в планетарный механизм или на выходе из планетарного механизма) зависит от особенности работы трактора, так как диапазоны частот вращения ВОМ, в которых будет циркуляция мощности, для них будет симметричен.
Другая отличительная особенность предлагаемого привода состоит в том, что все составляющие его компоненты сгруппированы в виде раздельных модулей таким образом, что коробка передач 2 и планетарный механизм 3 образуют единый модуль, размещенный в общем картере, например в картере ВОМ, а гидромашины 4 и 5 установлены на него в виде отдельных модулей. Таким образом реализуется раздельно-агрегатная компоновка, позволяющая варьировать компоновочные решения привода в зависимости от конкретных требований проектируемых МТА и применять стандартные (типовые) гидромашины, выпускаемые промышленностью.
В связи с тем, что приводы ВОМов компонуются совместно с основными механическими трансмиссиями, при использовании в них гидроприводов для регулирования передаточных чисел целесообразно разделять агрегаты в связи с разными эксплуатационными требованиями к механическим и гидравлическим устройствам. Целесообразность разделения агрегатов наиболее ярко проявляется при проведении плановой замене или ремонте самих гидромашин (насосов и гидромоторов) в тот период, когда другие узлы еще сохраняют работоспособность. Кроме этого возможность оснащения предлагаемого устройства типовыми гидромашинами, выпускаемыми промышленностью в отдельных корпусах, способствует за счет унификации модулей снижению затрат на изготовление, облегчает доступ к ним при ремонте, а также обеспечивает свободу компоновки, что важно при отдаленном расположении ВОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРГАНИЗАЦИИ ВРАЩЕНИЯ ОБЪЕМНОЙ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ И ЧЕТЫРЕХЗВЕННЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2005 |
|
RU2360164C2 |
| Трансмиссия транспортного средства | 1988 |
|
SU1539116A1 |
| Гидромеханическая передача для транспортной машины | 1971 |
|
SU449832A1 |
| Гидромеханическая трансмиссия транспортного средства | 1988 |
|
SU1593991A2 |
| ОБЪЕМНАЯ ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2010 |
|
RU2444660C1 |
| МЕХАНИЗМ ПЕРЕДАЧ И ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2236356C2 |
| ДВУХПОТОЧНАЯ ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1971 |
|
SU298495A1 |
| Гидромеханическая трансмиссия | 1980 |
|
SU893603A1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ВАЛОВ ОТБОРА МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2025305C1 |
| Гидромеханическая трансмиссия транспортного средства | 1987 |
|
SU1521621A1 |
Изобретение относится к механизмам отбора мощности от двигателя трактора. Привод выполнен в виде раздельно-модульного агрегата, в котором дифференциальный планетарный механизм скомпонован вместе с согласующими редукторами и коробкой передач трактора в единый модуль, размещенный в общем картере. Объемный гидропривод скомпонован в виде двух отдельных модулей: модуля с регулируемой гидромашиной и модуля с нерегулируемой машиной, которые устанавливаются на корпусе планетарного редуктора. Обе гидромашины выполнены обратимыми. При этом модуль с регулируемой гидромашиной соединен кинематически посредством соответствующего согласующего редуктора с муфтой управления включением/выключением вала отбора мощности или непосредственно с валом отбора мощности (ВОМ). Модуль с нерегулируемой гидромашиной также посредством соответствующего согласующего редуктора - с управляющим звеном планетарного механизма. Для полного останова ВОМ в нерабочем состоянии имеется тормоз, который совмещен в общем корпусе с муфтой включения/выключения ВОМ. Достигается повышение КПД привода ВОМ. 1 з.п. ф-лы, 2 ил.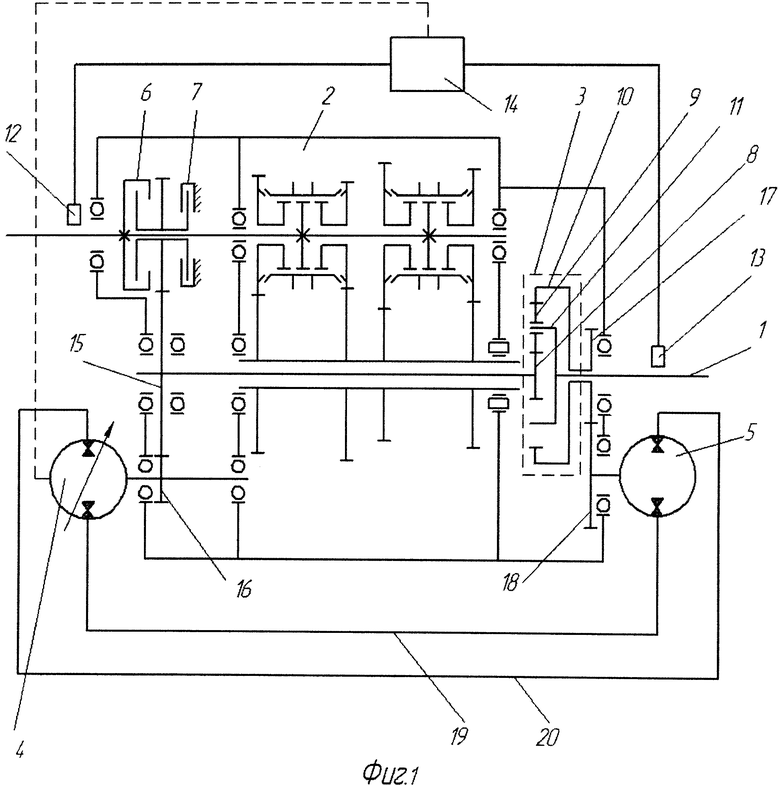
1. Двухпоточный привод вала отбора мощности от двигателя трактора через его механическую трансмиссию с коробкой передач, содержащий дифференциальный планетарный механизм, объемный гидропривод с двумя гидромашинами, одна из которых регулируемая, а также ряд согласующих редукторов, фрикционную муфту управления включением/выключением вала отбора мощности, размещенную по оси коробки передач, и контрольно-регулирующую аппаратуру с датчиком частоты вращения двигателя, датчиком частоты вращения вала отбора мощности и управляющим блоком, отличающийся тем, что он содержит тормоз вала отбора мощности и выполнен в виде раздельно-модульного агрегата, в котором дифференциальный планетарный механизм имеет корпус и скомпонован вместе с упомянутыми согласующими редукторами и коробкой передач трактора в единый модуль, размещенный в общем картере, а объемный гидропривод выполнен в виде двух отдельных модулей: модуля с регулируемой гидромашиной и модуля с нерегулируемой гидромашиной, установленных снаружи единого модуля, например на корпусе планетарного механизма, и при этом обе его гидромашины выполнены обратимыми, модуль с регулируемой гидромашиной соединен кинематически посредством соответствующего согласующего редуктора с муфтой управления включением/выключением вала отбора мощности или непосредственно с этим валом, а модуль с нерегулируемой гидромашиной также посредством соответствующего согласующего редуктора - с управляющим звеном планетарного механизма, например эпициклической шестерней.
2. Привод по п.1, отличающийся тем, что в нем тормоз вала отбора мощности совмещен с фрикционной муфтой включения/выключения в общий узел.
| US 7207916 B2, 24.04.2007 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ САМОХОДНОГО ЭНЕРГЕТИЧЕСКОГО СРЕДСТВА | 1995 |
|
RU2122952C1 |
| Механизм привода вала отбора мощности транспортного средства | 1986 |
|
SU1379148A2 |
| Механизм привода вала отбора мощности транспортного средства | 1985 |
|
SU1316857A1 |

