Изобретение относится к технике связи и предназначено для определения местонахождения (локализации) мобильного терминала (МТ), в частности, в сотовых сетях подвижной связи.
Расширение номенклатуры услуг, предоставляемых операторами сетей подвижной связи, таких, как оказание неотложной помощи при дорожно-транспортных происшествиях, мониторинг движения общественного транспорта, обеспечение служб 112 (911) и т.д., требует постоянного повышения точности определения местонахождения МТ. При этом операторы сотовой связи заинтересованы в минимальной модернизации аппаратуры сетей подвижной связи, абонентских устройств и их программного обеспечения.
Известные способы определения местонахождения МТ основаны на точной информации о пространственных координатах местонахождения базовых станций (БС) (точек доступа) беспроводной информационной сети.
В наиболее простом способе местонахождение МТ может быть определено координатами БС с точностью рабочей зоны этой БС. В сотовых сетях подвижной связи погрешность определения местонахождения МТ при этом способе может составлять от 500 до 30000 м в зависимости от плотности установки БС в регионе (см. Л.1. Ю.А.Громаков, А.В.Северин, В.А.Шевцов «Технология определения местоположения в GSM и UMTS», М., изд. «ЭКО-ТРЕНДЗ», 2005 г., стр.41). Такая точность, во многих случаях, является недостаточной для потребителей услуги определения местонахождения МТ в сотовых системах связи.
Высокая точность определения местонахождения МТ может быть достигнута при наличии одной БС путем измерения расстояния между БС и МТ и угла направленности электромагнитного излучения, что используется в радиолокации, но затруднительно и дорого использовать в существующих сетях сотовой связи стандарта GSM.
Несколько повысить точность локализации в сетях сотовой связи стандарта GSM можно путем определения величины задержки распространения сигнала - Timing advance (ТА) от БС до МТ в пределах соты (см. Л.2. заявку на изобретение RU 99114014 А, 27.04.2001, М. кл. G01S 3/02, Н04В 7/26).
В описанном способе точность локализации определяется кольцом шириной около 550 м с центром в точке нахождения БС и радиусом (по средней линии кольца) от 275 до 30000 м, в зависимости от плотности установки БС в регионе.
Такая точность определения местонахождения МТ в ряде случаев также не является достаточной для потребителей рассматриваемой услуги.
Дальнейшего повышения точности определения местонахождения МТ можно достигнуть, используя информацию о направленности антенн БС. Азимут и ширина диаграммы направленности в горизонтальной плоскости антенны БС, проводящей обмен с МТ, позволяет определить сегмент кольца на плоскости с углом от 60 до 120°, шириной около 550 м с центром в точке нахождения БС и радиусом (по средней линии кольца) от 275 до 30000 м в зависимости от плотности установки БС в регионе.
Такой способ позиционирования описан, например (см. Л.3. US 2004203908, А, 14.10.2004, М. кл. H04Q 7/38, H04L 12/28, H04Q 7/20), в котором определяют координаты МТ в пространстве множеством БС сотовой сети, а также получают информацию от множества направленных антенных элементов БС об угле направленности электромагнитной волны по отношению к источнику радиопередачи МТ. Далее производится вычисление с помощью измеренной и принятой информации текущего местоположения соответствующего МТ и установления, находится ли данный МТ в границах предварительно определенной области.
Следует отметить, что в известных способах определения местонахождения МТ с использованием информации о времени распространения сигнала, определением уровней мощности и использованием информации о направленности антенн определение местоположения производится путем определения координат объектов (МТ) на плоскости с использованием двумерной системы координат (более подробно см. Приложение). При этом обычно определяются взаимные расстояния между объектами (МТ и БС), а также углы между векторами, связывающими объекты.
Известен способ позиционирования (см. Л.4. Международную заявку на изобретение WO 2006070211 А, 06.07.2006, М.кл. H04Q 7/38, G01S 5/10, G01S 5/14), при котором местоположение МТ вычисляют путем определения расстояния от БС до МТ, используя известную мощность передатчика (БС), измеряя мощность приемника (МТ) и имея дополнительную информацию о параметрах направленных антенн МТ и БС. При этом для реализации способа необходимо использование, по меньшей мере, четырех БС. Расстояние между МТ и БС рассчитывают как отношение известных мощностей БС и измеренной мощности МТ. Координаты МТ определяют, используя двумерную систему координат на плоскости, путем нахождения точки пересечения трех окружностей, радиусы и центры которых определяют, используя известные расстояния между БС и координаты БС.
Однако формулы, устанавливающие соотношения между упомянутыми выше мощностями и определяемыми расстояниями, содержат неопределенные (неизвестные) параметры показателя степени определяемых расстояний, и в описании изобретения не содержится информация о том, как могут быть определены данные параметры, и для приближения их считают равными друг другу для каждой БС. Такой подход вносит значительные погрешности при определении расстояний между МТ и БС. При этом возможность использования дополнительной информации о параметрах антенн МТ и БС лишь декларируется, но фактически при осуществлении способа не учитываются особенности распространения электромагнитных волн на различных частотах и для различных высот антенн МТ и БС.
О точности определения местонахождения МТ авторы достаточной информации не приводят.
Данный способ позиционирования выбран за наиболее близкий аналог.
Техническим результатом изобретения является повышение точности определения местонахождения мобильного терминала, а также обеспечение оперативности, наглядности и удобства наблюдения за местонахождением МТ.
Для этого в способе определения местонахождения мобильного терминала (МТ) в беспроводной информационной сети, содержащем, по меньшей мере, четыре базовых станции (БС) и мобильные терминалы, выполненные с возможностью измерения уровней приходящих сигналов и передачи их на базовую станцию, а также контроллер, связанный через центр коммутации с сервером определения местоположения мобильного терминала, имеющего устройство отображения метонахождения, заключающемся в том, что мобильный терминал (МТ) осуществляет измерение уровней мощности принимаемых сигналов от базовых станций (БС) и передает сигналы измеренных уровней мощности в обслуживающую БС, где посредством коммутации измеренные сигналы передаются в сервер определения местонахождения МТ, в котором, используя имеющуюся информацию о мощностях, излучаемых базовыми станциями (БС) и параметры антенн БС, определяют местоположение МТ с привязкой координат МТ на плоскости расположения информационной сети, причем координаты МТ определяют по координатам точки пересечения трех окружностей, радиусы и центры которых вычисляют с использованием информации о координатах базовых станций, в сервере определения местонахождения МТ, для определения координат МТ используют параметры направленных антенн БС, такие как высоты антенн, коэффициенты усиления антенн, определяют отношения расстояний от МТ до БС по формулам:
 ;
;
 ;
;
 ,
,
где RMA, RMB, RMC, RMD - неизвестные расстояния от мобильного терминала (МТ) до базовых станций (А, В, С, D);
R×LA, R×LB, R×LC, R×LD - уровни мощности принимаемых МТ сигналов от четырех БС (А, В, С, D);
а, в, с, d, β - параметры, определяемые техническими характеристиками БС;
для БС - А
a=35,41·lg(fA/106)-13,82·lg(hA)-(1,1·lg(fA/106)-0,7)·1,5-PA-GA,
для БС - В
b=35,41·lg(fB/106)-13,82·lg(hB)-(1,1·lg(fB/106)-0,7)·1,5-PB-GB,
для БС - С
c=35,41·lg(fC/106)-13,82·lg(hC)-(1,1·lg(fC/106)-0,7)·1,5-PC-GC,
для БС - D
d=35,41·lg(fD/106)-13,82·lg(hD)-(1,1·lg(fD/106)-0,7)·1,5-PD-GD,
β=44,9-6,55·lg(hBC),
где fA; fB; fC; fD - рабочие частоты базовых станций;
hA; hB; hC; hD - высоты антенн базовых станций;
PA; PB; PC; PD - выходные мощности передатчиков базовых станций;
GA; GB; GC; GD - коэффициенты усиления антенн базовых станций
hBC - средняя высота антенн базовых станций,
после этого определяют радиусы трех упомянутых окружностей из соотношений:
 ;
;  ;
;  ;
;
где RBA, RCA, RDA - известные расстояния между БС,
и координаты центров (в комплексном виде) упомянутых окружностей из соотношений:
 ;
;
 ;
;
 ;
;
где координаты базовых станций (в комплексном виде)
 ;
;  ;
;  ;
;  ;
;
 ;
; 
 ;
;
далее методом триангуляции определяют координаты точки пересечения трех упомянутых окружностей, после чего цифровой сигнал, соответствующий координатам точки пересечения этих трех окружностей, поступает на устройство отображения местоположения, на экране которого сформирована имеющаяся в его памяти электронная карта заданной местности с расположением беспроводной информационной сети, на которой преобразованный цифровой сигнал, соответствующий координатам точки пересечения трех упомянутых окружностей, отображают в виде символа, например, телефонной трубки, который соответствует координатам МТ на плоскости электронной карты заданной местности.
Определение координат местонахождения МТ через определение отношений расстояний от МТ до БС в отличие от прототипа, где определение координат осуществляется через определение расстояний от МТ до БС со значительными погрешностями, позволяет исключить влияние неопределяемых параметров (коэффициентов преобразований сигналов в приемнике МТ), имеющих место в способе-прототипе, и тем самым повысить точность определения местонахождения МТ. Кроме того, дополнительные операции, позволяющие преобразовать цифровой сигнал, соответствующий точке пересечения трех окружностей, и непосредственно отобразить на плоскости электронной карты заданной местности местонахождение МТ, обеспечивают оперативность, наглядность и удобство определения местонахождения МТ.
Пример реализации способа поясняется чертежами, где на фиг.1 в качестве примера беспроводной информационной сети приведена функциональная схема сотовой сети с услугой определения местонахождения МТ, на фиг.2 представлен пример определения координат точки пересечения трех окружностей, определяющей координаты местонахождения МТ, на фиг.3 приведена структурная схема сервера определения координат МТ, а на фиг.4 представлена блок-схема алгоритма определения местонахождения МТ.
В соответствии с фиг.1 сотовая сеть с услугой определения местонахождения МТ содержит связанные между собой двунаправленной радиосвязью МТ 1, четыре БС (A, B, C, D) 2 и контроллер 3 БС, связанный также двунаправленной радиосвязью с центром 4 коммутации сети сотовой связи, который, в свою очередь, связан двунаправленной радиосвязью с сервером 5 определения местонахождения МТ, связанным двунаправленной радиосвязью с устройством 6 отображения местонахождения МТ.
На фиг.2 в двумерной системе координат Х и Y показаны: местонахождение БС (A, B, C, D), полученные на плоскости три окружности, путем определения их радиусов и координат центров (Zba, Zca, Zda) и точка М их пересечения, найденная известным методом триангуляции (см. Л.5. Красовский Ф.Н., Данилов В.В., Руководство по высшей геодезии, 2 изд., ч.1, в. 1-2, М., 1938-39; Инструкция о построении государственной геодезической сети СССР, 2 изд. М., 1966) и определяющая координаты местонахождения МТ 1.
В соответствии с фиг.3 сервер 5 определения координат местонахождения МТ содержит базу 7 данных, из которой через выходную шину на один из входов узла 8 вычисления отношений расстояний между БС и МТ и один из входов узла 9 вычисления параметров окружностей поступают данные о требуемых параметрах антенн БС 2 и МТ 1, на другой вход узла 8 поступают (через контроллер 3 БС и центр 4 коммутации сотовой связи) данные об излучаемых БС 2 уровнях мощности, измеренных МТ 1. Выход узла 8 вычисления отношения расстояний между БС и МТ связан с другим входом узла 9 вычисления параметров окружностей (радиусов и координат их центров), выход которого связан со входом узла 10 определения точки пересечения окружностей, определяющей координаты местонахождения МТ, выход которого связан со входом устройства 6 отображения местонахождения МТ (на плоскости электронной карты).
Осуществление предлагаемого способа в соответствии с фиг.1, 2, 3, 4 происходит следующим образом.
Мобильный терминал (МТ)1, местонахождение которого требуется определить, принимает сигналы одновременно от четырех базовых станций (БС) 2 (А, В, C, D);
МТ 1 измеряет уровни мощности принятых сигналов в цифровом виде и пересылает их обслуживающей БС 2, формируя вектор параметров
[R×LA, R×LB, R×LC, R×LD],
обслуживающая МТ 1 БС 2 передает результаты измерений в контроллер 3 действующей системы сотовой связи, функциональная схема контроллера и его работа описаны в (см. 1. стр.8, рис.1.1);
по внутренним каналам управления (контроллер 3 - центр коммутации 4) результаты измерений поступают в сервер 5 определения координат местонахождения МТ, который может входить в состав серверов позиционирования современных сотовых сетей, описание функционирования и схема центра 4 коммутации и сервера 5 приведены соответственно (см. 1. стр.33, рис.3.4 и 6. Кааранен, Ахти Айнен, Лаитинен, Найян В.Ниеми Сети UMTS. Архитектура, мобильность, сервисы. М., изд. «Техносфера», 2007 г., стр.288-290, рис.8.22 и 8.23);
в сервере 5 определения координат местонахождения МТ имеется база 7 данных параметров базовых станций 2 (A, B, C, D), содержащая их координаты, рабочие частоты, выходные мощности передающих устройств, высоты антенн, коэффициенты усиления антенн:
[ХA,YA]; [ХB,YB]; [ХC,YC]; [ХD,YD] - координаты базовых станций;
fA; fB; fC; fD - рабочие частоты базовых станций;
hA; hB; hC; hD - высоты антенн базовых станций;
PA; PB; PC; PD - выходные мощности передатчиков базовых станций;
GA; GB; GC; GD - коэффициенты усиления антенн базовых станций
hBC - средняя высота антенн базовых станций.
Далее в сервере 5 определения местонахождения МТ производятся нижеприведенные вычислительные операции в соответствии с блок-схемой алгоритма, приведенной на фиг.4:
полученные значения уровней мощности и параметры БС 2 пересчитываются в узле 8 вычисления расстояний между БС и МТ в отношения расстояний между каждой БС 2 к расстоянию между МТ 1 и самой мощной БС 2 (как правило, это обслуживающая станция):
;
;
,
a=35,41·lg(fA/106)-13,82·lg(hA)-(1,1·lg(fA/106)-0,7)·1,5-PA-GA,
b=35,41·lg(fB/106)-13,82·lg(hB)-(1,1·lg(fB/106)-0,7)·1,5-PB-GB,
c=35,41·lg(fC/106)-13,82·lg(hC)-(1,1·lg(fC/106)-0,7)·1,5-PC-GC,
d=35,41·lg(fD/106)-13,82·lg(hD)-(1,1·lg(fD/106)-0,7)·1,5-PD-GD,
β=44,9-6,55·lg(hBC),
полученные отношения расстояний и координаты БС 2 позволяют рассчитать радиусы и центры трех окружностей в узле 9 вычисления параметров окружностей
; ; ;
;
;
;
; ;
точка пересечения трех окружностей является точкой местонахождения МТ;
точка пересечения трех окружностей определяется известным методом триангуляции - определение координат третьей вершины треугольника по известным координатам двух других вершин и длинам сторон треугольника в узле 10 определения точки пересечения окружностей;
далее цифровой сигнал, соответствующий точке пересечения трех окружностей, преобразуется в выбранный символ, который отображается на электронной карте, выводимой на устройство 6 отображения местонахождения МТ, пример функционирования и схема которого приведены (см. 6. стр.275, 285, рис.8.13, 8.19), или отправляется потребителю по телекоммуникационным каналам, местонахождение символа на электронной карте является местонахождением МТ 1.
Как видно из приведенного примера осуществления предлагаемого способа, его реализация не требует значительного усложнения имеющихся аппаратных средств сотовой сети и при этом дает возможность повысить точность определения местонахождения МТ, исключив влияние неопределяемых параметров, имеющее место в прототипе, а также обеспечить наглядность, оперативность и удобство представления местонахождения МТ на формируемой электронным образом карте местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНЫХ СИГНАЛОВ | 2005 |
|
RU2306578C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНЫХ СТАНЦИЙ | 2005 |
|
RU2297718C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2320505C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ, МЕСТОНАХОЖДЕНИЯ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2419980C2 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
Изобретение относится к технике связи и предназначено для определения местонахождения (локализации) мобильного терминала (МТ), в частности, в сотовых сетях подвижной связи. Техническим результатом изобретения является повышение точности определения местонахождения мобильного терминала, а также обеспечение оперативности, наглядности и удобства наблюдения за местонахождением МТ. Для этого в способе определения местонахождения мобильного терминала (МТ) в беспроводной информационной сети, содержащем, по меньшей мере, четыре базовых станции (БС) и мобильные терминалы, выполненные с возможностью измерения уровней приходящих сигналов и передачи их на базовую станцию, а также контроллер, связанный через центр коммутации с сервером определения местоположения мобильного терминала, имеющего устройство отображения местонахождения, заключающемся в том, что мобильный терминал (МТ) осуществляет измерение уровней мощности принимаемых сигналов от базовых станций (БС) и передает сигналы измеренных уровней мощности в обслуживающую БС, где посредством коммутации измеренные сигналы передаются в сервер определения местонахождения МТ, в котором, используя имеющуюся информацию о мощностях, излучаемых базовыми станциями (БС), и параметры антенн БС, определяют местоположение МТ с привязкой координат МТ на плоскости расположения информационной сети, причем координаты МТ определяют по координатам точки пересечения трех окружностей, радиусы и центры которых вычисляют с использованием информации о координатах базовых станций, в сервере определения местонахождения МТ, для определения координат МТ используют параметры направленных антенн БС, такие как высоты антенн, коэффициенты усиления антенн, определяют отношения расстояний от МТ до БС, далее методом триангуляции определяют координаты точки пересечения трех упомянутых окружностей, после чего цифровой сигнал, соответствующий координатам точки пересечения этих трех окружностей, поступает на устройство отображения местоположения, на экране которого сформирована имеющаяся в его памяти электронная карта заданной местности с расположением беспроводной информационной сети, на которой преобразованный цифровой сигнал, соответствующий координатам точки пересечения трех упомянутых окружностей, отображают в виде символа, например, телефонной трубки, который соответствует координатам МТ на плоскости электронной карты заданной местности. 4 ил.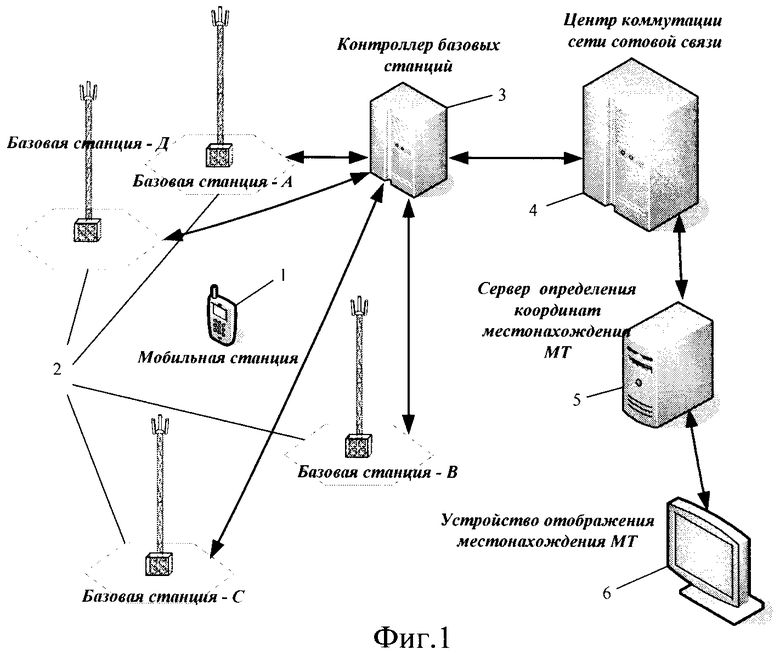
Способ определения местонахождения мобильного терминала (МТ) в беспроводной информационной сети, содержащей, по меньшей мере, четыре базовых станции (БС) и мобильные терминалы, выполненные с возможностью измерения уровней приходящих сигналов и передачи их на базовую станцию, а также контроллер, связанный через центр коммутации с сервером определения местоположения мобильного терминала, имеющего устройство отображения местонахождения, заключающийся в том, что мобильный терминал (МТ) осуществляет измерение уровней мощности принимаемых сигналов от базовых станций (БС) и передает сигналы измеренных уровней мощности в обслуживающую БС, где посредством коммутации измеренные сигналы передаются в сервер определения местонахождения МТ, в котором, используя имеющуюся информацию о мощностях, излучаемых базовыми станциями (БС) и параметры антенн БС, определяют местоположение МТ с привязкой координат МТ на плоскости расположения информационной сети, причем координаты МТ определяют по координатам точки пересечения трех окружностей, радиусы и центры которых вычисляют с использованием информации о координатах базовых станций, отличающийся тем, что в сервере определения местонахождения МТ для определения координат МТ используют параметры направленных антенн БС, такие как высоты антенн, коэффициенты усиления антенн, определяют отношения расстояний от МТ до БС по формулам:
где rma, rmb, rmc, rmd - неизвестные расстояния от мобильного терминала (МТ) до базовых станций {А, В, С, Z));
R·LA, R·LB, R·LC, R·LD - уровни мощности принимаемых МТ сигналов от четырех БС (А, В, С, D);
а, в, с, d, β - параметры, определяемые техническими характеристиками БС; для БС - А
a=35,41·lg(fA/106)-13,82·lg(hA)-(1,1·lg(fA/106)-0,7)·1,5-PA-GA, для БС - В
b=35,41·lg(fB/106)-13,82·lg(hB)-(1,1·lg(fB/106)-0,7)·1,5-PB-GB, для БС - С
c=35,41·lg(fC/106)-13,82·lg(hC)-(1,1·lg(fC/106)-0,7)·1,5-PC-GC, для БС - D
d=35,41·lg(fD/106)-13,82·lg(hD)-(1,1·lg(fD/106)-0,7)·1,5-PD-GD,
β=44,9-6,55·lg(hBC),
где fA; fB; fC; fD - рабочие частоты базовых станций;
hA; hB; hC; hD - высоты антенн базовых станций;
PA; PB; PC; PD - выходные мощности передатчиков базовых станций;
GA; GB; GC; GD - коэффициенты усиления антенн базовых станций;
hBC - средняя высота антенн базовых станций,
после этого определяют радиусы трех упомянутых окружностей из соотношений:
 ;
;  ;
;  ;
;
где RBA, rca, rda - известные расстояния между БС,
и координаты центров (в комплексном виде) упомянутых окружностей из соотношений:
 ;
;
 ;
;
 ;
;
где координаты базовых станций (в комплексном виде)
A=XA+jYA; B=XB+jYB; C=XC+jYC; D=XD+jYD;
φBA=arg(B-A); φCA=arg(С-A); φDA=arg(D-A);
далее методом триангуляции определяют координаты точки пересечения трех упомянутых окружностей, после чего цифровой сигнал, соответствующий координатам точки пересечения этих трех окружностей, поступает на устройство отображения местоположения, на экране которого сформирована имеющаяся в его памяти электронная карта заданной местности с расположением беспроводной информационной сети, на которой преобразованный цифровой сигнал, соответствующий координатам точки пересечения трех упомянутых окружностей, отображают в виде символа, например телефонной трубки, который соответствует координатам МТ на плоскости электронной карты заданной местности.
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СПОСОБ ЗАПРОСА НА ПРЕДОСТАВЛЕНИЕ УСЛУГИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДЛЯ СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ | 1999 |
|
RU2172494C2 |
| СПОСОБ РЕГИСТРАЦИИ ПОДВИЖНОГО КОММУНИКАЦИОННОГО УСТРОЙСТВА | 1994 |
|
RU2107397C1 |
| US 5293643 А, 08.03.1994 | |||
| US 5212684, 18.05.1993. | |||

