Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и, в частности, может быть использовано в системах местоопределения мобильных станций систем связи с частотно-временным разделением каналов.
Известны способы, которые могут быть использованы для определения координат источников радиоизлучений (ИРИ), например:
1. Угломерный способ местоопределения [1, 5]. Такой способ применяется при наличии нескольких (не менее двух) разнесенных в пространстве средств радиопеленгования. Местоопределение осуществляется посредством расчета точки пересечения линий пеленгов на ИРИ.
Недостатком указанного способа является необходимость использования достаточно сложных средств радиопеленгования и канала связи между ними.
2. Разностно-дальномерный способ [1, 5] основан на измерении разностей расстояний от ИРИ до пункта радиоконтроля. Эти разности находят путем измерения корреляционным методом относительных временных задержек. При этом необходимо как минимум три разнесенных в пространстве пункта радиоконтроля.
Недостатками указанного аналога являются:
- необходимость использования минимум трех измерительных пунктов;
- для функционирования разностно-дальномерной системы местоопределения пункты радиоконтроля должны функционировать в синхронном режиме, вследствие чего точность местоопределения существенно зависит от точности привязки к системе единого времени.
3. В [2] приведен способ определения местоположения мобильной станции в системах мобильной радиосвязи, однако область его применения ограничивается собственно самими системами мобильной радиосвязи для обеспечения функционирования мобильных систем связи, т.е. рассматривается задача определения координат мобильной станции на основе измерений времени прихода сигнала на несколько базовых станций и не применим для автономных систем местоопределения, в частности в интересах радиоконтроля данных систем.
Из известных способов наиболее близким аналогом (прототипом) [3] предлагаемого способа по технической сущности является способ местоопределения источников радиоизлучений, заключающийся в измерении направления на источник радиоизлучений, оценки относительной временной задержки путем оценки расхождения времени прихода сигнала от источника относительно опорной временной шкалы, сформированной на основе оценки временной структуры сигнала источника, местоположение которого полагается известным, а координаты источника радиоизлучений вычисляются как точка пересечения линии направления на источник и гиперболической линии положения, определяемой на основе сравнения оценок расхождения времени прихода сигналов по времени от источников с известным и оцениваемым местоположением, функционирующих в единой системе синхронизации цифровыми (дискретными) видами сигналов.
Функционирование системы местоопределения в соответствии со способом-прототипом происходит следующим образом.
На станции радиоконтроля (измерителе) производят оценку направления на источник радиоизлучений, координаты которого подлежат оценке, формируют оценку опорной временной шкалы главной станции сети, в которой функционирует ИРИ, оценивают время прихода источника и вычисляют расхождение от ближайшего (по времени) маркера опорной временной шкалы и времени прихода сигнала от источника, затем на основе полученных данных и координатах измерителя и главной станции вычисляют координаты путем решения системы уравнений для линии пеленга и гиперболической линии положения.
Недостатки способа прототипа:
1. Низкая точность оценки координат источника излучения применительно к мобильным станциям систем связи с частотно-временным разделением каналов вследствие неучета особенностей сигналообразования в данных системах.
2. Необходимость использования радиопеленгатора с достаточно сложной антенной системой и многоканального радиоприемного устройства.
Целью настоящего изобретения является разработка способа, обеспечивающего повышение точности оценки координат мобильных абонентов систем связи с частотно-временным разделением каналов и упрощение технических средств радиоконтроля.
Поставленная цель достигается тем, что в известном способе местоопределения ИРИ, включающем в себя измерение направления на ИРИ, оценки относительной временной задержки путем оценки расхождения времени прихода сигнала от источника относительно опорной временной шкалы, сформированной на основе оценки временной структуры сигнала источника, местоположение которого полагается известным, а координаты источника радиоизлучений вычисляются как точка пересечения линии направления на источник и гиперболической линии положения, определяемой на основе сравнения оценок расхождения времени прихода сигналов по времени от источников с известным и оцениваемым местоположением, функционирующих в единой системе синхронизации цифровыми (дискретными) видами сигналов, исключают операцию измерения пеленга, а гиперболическая линия положения, построенная на основе оценки расхождения времени прихода сигнала от источника относительно опорной временной шкалы, сформированной на основе оценки временной структуры сигнала базовой станции, местоположение которой полагается известным, корректируется с учетом временной задержки от базовой станции до мобильной станции, передаваемой в интервале доступа в процессе сеанса связи, при этом идентичные измерения производят при перемещении измерителя во второй точке стояния, а координаты мобильной станции определяют путем вычисления точки пересечения двух гиперболических (эллиптических) линий положения.
Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается введением новой операции - анализа интервала доступа сеанса связи мобильной станции и учет информации о расстоянии от мобильной станции (МС) до базовой станции (БС) с соответствующей корректировкой гиперболической (эллиптической) линии положения. Таким образом, заявляемый способ соответствует критерию изобретения "новизна".
Исходными данными (условиями) для реализации способа определения координат являются:
- мобильная станция функционирует в системе связи с частотно-временным разделением каналов;
- координаты БС и точек стояния измерителя известны.
Сравнение заявляемого способа с другими аналогичными способами показывает необходимость выполнения известных операций - измерение времени прихода сигналов. Однако введение перечисленной совокупности исходных данных, учет специфических особенностей сигналообразования в системах связи с частотно-временным разделением каналов и введение второго измерения временных параметров позволило отказаться от необходимости измерения пеленга. При этом вместо разности времени прихода сигналов на несколько разнесенных в пространстве пунктов радиоконтроля используется оценка расхождения времени прихода сигнала и опорной временной шкалы и информации о расстоянии от мобильной станции до БС, кроме того, достаточно только два измерения указанных параметров, что позволяет сделать вывод о соответствии заявляемого способа критерию "существенные отличия".
Для пояснения сущности изобретения рассмотрим особенности функционирования систем связи с частотно-временным разделением каналов на примере системы связи стандарта GSM (следует отметить, что указанные ниже особенности присущи практически всем системам связи с частотно-временным разделением каналов [4]). Первая установка соединения абонента с БС осуществляется по направлению "вверх" (направление от абонента к БС). Данное соединение происходит в виде пакета доступа (АВ - access burst) по каналу параллельного доступа (RACH - random access channel). Основной характеристикой пакета доступа является то, что кроме последовательности синхронизации (49 бит) и битов кодирования (39 бит) передается информация о временной задержке распространения сигнала от МС до БС.Информация о временной задержке передается в защитном интервале (GP - guard period), временная длительность которого составляет 68.25 бит или 252 мкс. Графическая интерпретация временных кадров представлена на фиг.1. Таким образом, при функционировании данных систем осуществляется "выравнивание" временных кадров с учетом расстояния от БС до МС с точностью до 1 бита (48/13 мкс). Данное положение не учтено в способе-прототипе, т.к. в нем предполагалось, что существует временная задержка во временных последовательностях от МС до БС, определяемая расстоянием между ними, вследствие чего при определении координат МС в данных системах точность достаточно низкая.
На фиг.2 представлены временные диаграммы последовательностей импульсов БС, МС, получаемые на измерителе, определяемые взаимным расположением БС, МС и измерителем. При этом на фиг.2 приняты следующие обозначения: А - измеритель (пункт радиоконтроля); В-БС с известными координатами; С-МС, местоположение которой определяется; UИРИ1(t) - импульсные последовательности сигналов от БС, местоположение которой, в соответствии с перечнем ограничений, априорно известно; t1B(t1C) - время начала передачи импульса (в данном случае временной кадр, выделенной рассматриваемой БС) с периодом следования Тп=0.577 мс; t1A(t2A) - время регистрации в точке А моментов прихода сигналов от БС и МС соответственно; ΔτС,А - задержка во времени распространения сигнала от МС до измерителя (А), определяемая на основе оценки расхождения во времени момента регистрации сигнала от МС относительно опорной шкалы, сформированной на измерителе (А) по результатам оценки временной структуры сигнала от БС.
Ключевым звеном реализации способа является обоснованное допущение о том, что алгоритм функционирования радиосети синхронной передачи данных позволяет интерпретировать сигнал, полученный от МС, как сигнал, переданный от БС и условно ретранслированный приемопередающим устройством БС через неизвестное, но целое число циклов.
То есть должны быть справедливы выражения:
где К - целое число периодов сигнала в интервале времени t1C-t1B; с - скорость распространения радиоволн.
При этом радиус, определяемый временной задержкой (ТА - time advance) ΔτВС, передаваемой в защитном интервале, определяется следующим образом [4]

где m=1 бит=48/13 мкс.
Таким образом, МС очевидно располагается в одной из точек окружности радиуса R.
В качестве результата, в ходе оценок временных параметров входного потока, на измерителе (А) должно быть определено время запаздывания (или опережения) сигнала (Δτ1,2) от МС (точка С) относительно ближнего маркера опорной временной шкалы, сформированной на измерителе

при условии, что МС (точка С) топологически расположена на расстоянии, превышающем расчетный радиус (определяемый БС, местоположение которой известно), или

Известно, что фиксированная сумма расстояний определяет эллиптическую линию положения (3), а фиксированная разность - гиперболическую (4). Далее на основании временной задержки ΔτВС и, соответственно, радиуса R=BC эллиптическая (гиперболическая) линия положения, определяемая (3), (4), корректируется следующим образом:

Выражение (5) определяет скорректированную эллиптическую (гиперболическую) линию положения.
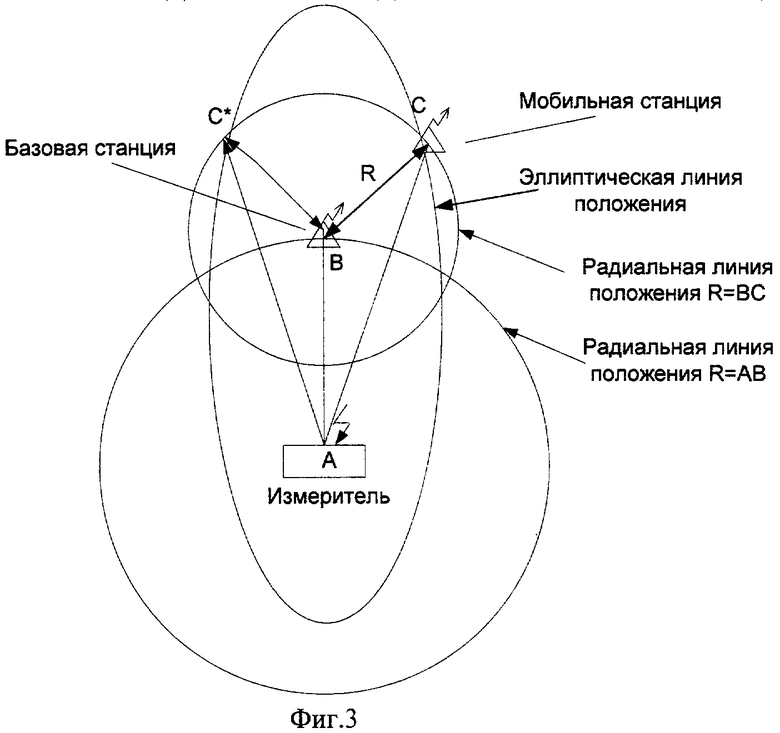
Эллиптическая (гиперболическая) линия положения пересекает окружность в 4 точках, в одной из точек которой находится МС (см. фиг.3). Однако количество неоднозначных точек пересечения можно сократить до двух. Действительно, из (5) мы можем получить расстояние от измерителя до МС-АС (если сигнал от МС опережает ближайший маркер шкалы, то нужно пользоваться (3) - эллиптическая линия положения, если запаздывает, то (4) - гиперболическая линия положения). С учетом полученного расстояния и того, что МС располагается на одной из точек окружности с радиусом R, можно определить точку пересечения АС с окружностью, однако ввиду того, что у нас отсутствует информация о направлении на МС, то очевидно на окружности располагаются две равноудаленные точки от измерителя (см. фиг.3) С и С*.
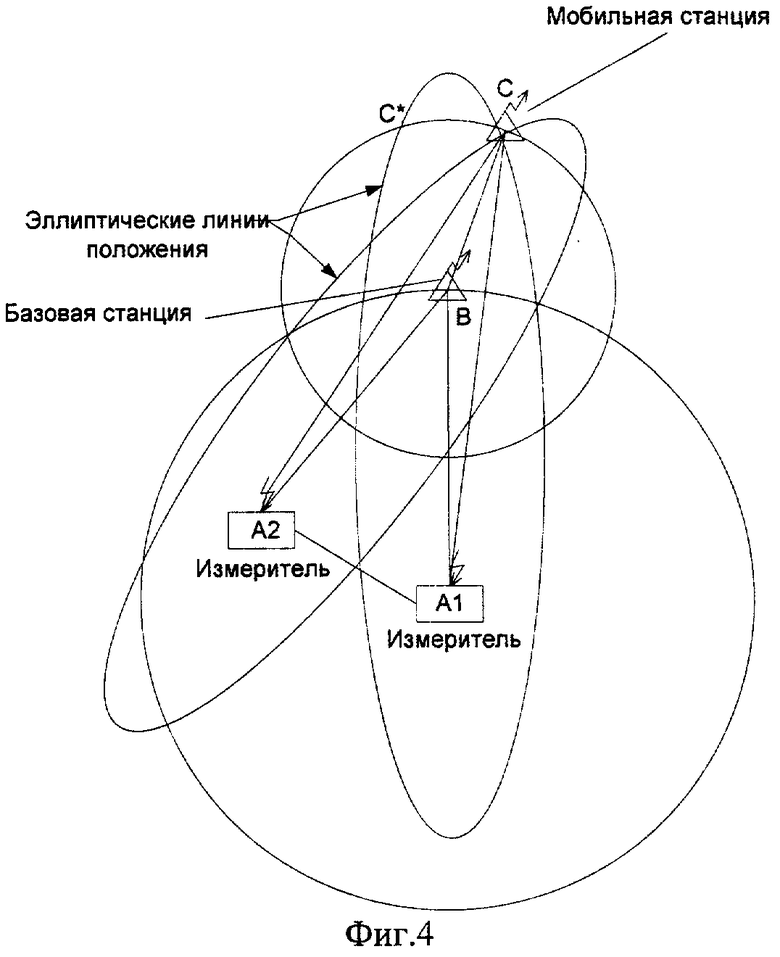
Для устранения неоднозначности расположения МС на окружности необходимо провести аналогичные измерения во второй точке при перемещении измерителя. Повторные измерения позволят построить вторую гиперболическую (эллиптическую) линию положения, при этом совместное пересечение трех линий положения - радиальной и двух гиперболических (эллиптических) линий положения будет только в одной точке, что позволяет устранить неоднозначность в определении координат МС. На фиг.4 показаны рассматриваемые линии положения на примере эллиптических линий положения и единственная точка их пересечения, определяющая координаты МС. При этом точками А1 и А2 обозначены точки стояния передвигающегося измерителя
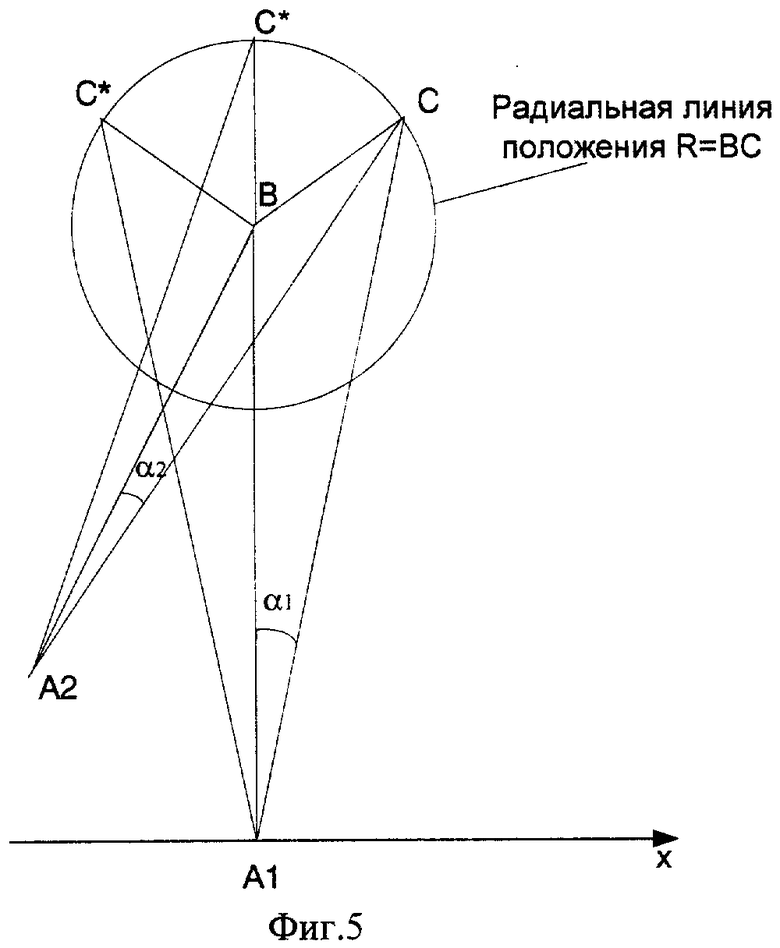
Для вычисления координат собственно МС нам, в конечном счете, необходимо определить углы α1 и α2 двух треугольников (см. фиг.5), т.к. все остальные параметры рассматриваемой геометрической задачи нам известны. В этой связи аналогично [5, стр.234] задачу определения точки пересечения гиперболических (эллиптических) линий положежения сведем к вычислению соответствующих углов.
Рассмотрим треугольники A1BC и А1ВС* (при этом очевидно, что все стороны данного треугольника известны), угол ∠BA1C, определяющий угол на МС, может быть найден на основе теоремы косинусов  (и соответственно ∠BA1C*), аналогично находим угол ∠BA2C (ZBA2C*). Из фиг.5 видно, что данные углы однозначно определяют координаты МС.
(и соответственно ∠BA1C*), аналогично находим угол ∠BA2C (ZBA2C*). Из фиг.5 видно, что данные углы однозначно определяют координаты МС.
Таким образом, получили все необходимые данные для определения координат МС - направление и дальность до МС.
Необходимые технические средства для реализации заявленного способа являются широко известными. Для измерения времени прихода сигнала можно воспользоваться корреляционным способом [1] на основе любого радиоприемного устройства соответствующего диапазона частот, в котором дополнительно введен автокоррелятор. Кроме того, учитывая, что рассматривается дискретный класс сигналов, можно непосредственно измерять время прихода импульса и необходимую относительную временную задержку вычислять как разность времени прихода сигнала и ближайшего маркера опорной временной шкалы [1]. Для определения координат измерителя можно воспользоваться спутниковым навигационным приемником. Следует отметить, что, в отличие от средств пеленгования, устройство измерения времени прихода сигнала может быть реализовано на любом радиоприемном устройстве соответствующего диапазона частот. При этом он может быть выполнен в носимом варианте, что позволяет существенно упростить технические средства радиоконтроля. Кроме того, для измерения времени прихода сигнала не требуется использование сложных антенных решеток, что также позволяет упростить технические средства радиоконтроля.
Как видно из приведенного описания, заявленный способ местоопределения не требует наличия радиопеленгатора, учитываются особенности систем связи с частотно-временным разделением каналов, кроме того, нет необходимости привязки к системе единого времени, и точность местоопределения зависит только от точности оценки необходимых параметров.
Следовательно, можно сделать вывод, что цель, поставленная перед изобретением, - разработка способа, обеспечивающего повышение точности оценки координат подвижных абонентов систем связи с частотно-временным разделением каналов и упрощение технических средств радиоконтроля - достигнута.
Технико-экономический эффект, обусловленный применением данного способа, заключается в упрощении технических средств для определения местоположения источников радиоизлучений и повышении точности местоопределения, а следовательно - повышении эффективности пассивных систем радиоконтроля в целом.
Количественная величина ожидаемого технико-экономического эффекта от использования предложенного способа зависит от типа системы, подлежащей радиоконтролю, и важности данной системы, ее определение возможно после внедрения предложенного способа в конкретных системах радиоконтроля.
Источники информации
1. Караваев В.В., Сазонов В.В. Статистическая теория пассивной локации. - М.: Радио и связь, 1987. - 240 с.
2. Патент РФ №2252429 от 07.06.2001.
3. Патент РФ №2248584 от 21.03.02.
4. В.Г.Карташевский, С.Н.Семенов, Т.В.Фирстова. Сети подвижной связи. - М.: Эко-Трейдз, 2001. - 299 с.
5. Кондратьев B.C. и др. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2006 |
|
RU2306579C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2476900C1 |
| ОДНОПОЗИЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2657237C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| ОДНОПОЗИЦИОННЫЙ КОРРЕЛЯЦИОННЫЙ УГЛОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2017 |
|
RU2674248C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2021 |
|
RU2790348C1 |

Изобретение относится к области радиотехники и может быть использовано в системах местоопределения мобильных станций систем связи. Достигаемый технический результат - определение координат мобильных станций систем связи с частотно-временным разделением каналов. Способ включает оценку относительной временной задержки путем измерения расхождения времени прихода сигнала от мобильной станции относительно опорной временной шкалы, сформированной при измерении временной структуры сигнала базовой станции, местоположение которой полагается известным, определяют расстояние от базовой станции до мобильной станции на основе временной задержки, передаваемой в сигнале базовой станции, оценивают две относительные временные задержки в двух точках стояния измерителя с известными координатами, вычисляют две гиперболические линии положения, определяемые двумя относительными временными задержками, корректируют гиперболические линии положения с учетом расстояния от базовой станции до мобильной станции, определяют координаты мобильной станции путем вычисления точки пересечения двух гиперболических линий положения. 5 ил.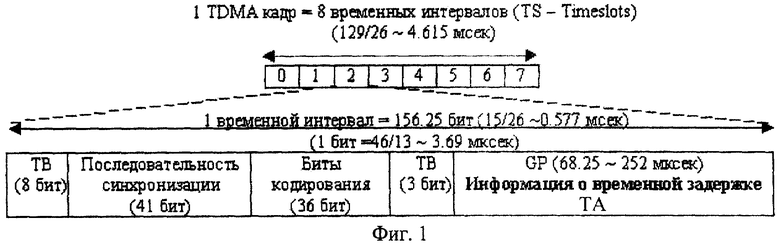
Способ определения координат мобильных станций, включающий оценку относительной временной задержки путем измерения расхождения времени прихода сигнала от мобильной станции относительно опорной временной шкалы, сформированной при измерении временной структуры сигнала базовой станции, местоположение которой полагается известным, отличающийся тем, что определяют расстояние от базовой станции до мобильной станции на основе временной задержки, передаваемой в сигнале базовой станции, оценивают две относительные временные задержки в двух точках стояния измерителя с известными координатами, вычисляют две гиперболические линии положения, определяемые двумя относительными временными задержками, корректируют гиперболические линии положения с учетом расстояния от базовой станции до мобильной станции, определяют координаты мобильной станции путем вычисления точки пересечения двух гиперболических линий положения.
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2001 |
|
RU2252429C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| УСТРОЙСТВО для КОНТАКТНОЙ СВАРКИ ДЕТАЛЕЙ МАЛЫХ ТОЛЩИН | 0 |
|
SU241565A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

