Предложенное изобретение относится к области радионавигации, спутниковой навигации, геодезии и может быть использовано для навигации подвижных объектов в режиме реального времени.
Известна система мониторинга подвижных объектов (Рушкевич А., Осадчий В. Мониторинг подвижных объектов: российские реалии и технические инновации [Текст] / А. Рушкевич, В. Осадчий // Беспроводные технологии. - 2010. - №3. - С. 56-60), состоящая из телеметрического терминала, выполняющего следующие функции:
- определения координат подвижного объекта в автономном (абсолютном) методе при помощи спутникового ГЛОНАСС/GPS приемника,
- сбора информации от бортового оборудования и дополнительных датчиков,
- пересылки информации по каналам связи в диспетчерский сервер.
Кроме телеметрического терминала, в предложенную систему входит диспетчерский сервер, представляющий собой программное обеспечение, для обеспечения клиентов объективной информацией о местонахождении подвижного объекта в данный момент времени.
Данная система обладает следующим недостатками:
- в системе мониторинга подвижных объектов в качестве телеметрического терминала выступает одночастотный двухсистемный кодовый ГЛОНАСС/GPS модуль, принимающий только сигналы стандартной точности от спутников глобальных навигационных систем (ГЛОНАСС/GPS), поэтому погрешность определения местоположения подвижного объекта в данной системе составляет 5-10 метров в системе координат WGS - 84 [Антонович К.М. Использование спутниковых радионавигационных систем в геодезии [Текст] / К.М. Антонович // ГОУ ВПО «Сибирская государственная геодезическая академия». - М: ФГУП «Картгеоцентр», 2006. - 360 с.],
- в системе мониторинга подвижных объектов не вводится корректирующая информация, получаемая от базовой станции, имеющей точные координаты в системе координат WGS - 84, в местоположение подвижного объекта,
- в системе мониторинга подвижных объектов отсутствует блок обработки совместной информации, поступающей с базовой станции и подвижного объекта.
Наиболее близкой системой того же назначения к заявляемой по совокупности признаков является система определения местоположения подвижных объектов в режиме реального времени (Пат. 2444705 Российская Федерация МПК51 GO1C 21/24 Система определения местоположения подвижных объектов в режиме реального времени [Текст] / И. А. Лукин, С.В. Мельников; заявители и патентообладатели: Открытое акционерное общество «СУПЕРТЕЛ». - 2010146177, заявл. 08.11.2010, опубл. 10.03.2012 - Бюл. №7. - 7 с.), состоящая из спутников глобальных навигационных систем, диспетчерской станции, содержащей геоинформационную систему, базовой станции, подвижных объектов, оснащенных телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта.
Недостатками технического решения, принятого за прототип, являются:
- в системе мониторинга подвижных объектов в качестве телеметрического терминала выступает одночастотный двухсистемный кодовый ГЛОНАСС/GPS модуль, принимающий только сигналы стандартной точности от спутников глобальных навигационных систем (ГЛОНАСС/GPS), поэтому погрешность определения местоположения подвижного объекта с использованием корректирующей информации от диспетчерской станции, имеющей точные координаты в системе координат WGS - 84, будет иметь величину, равную 1-2 метра [Антонович К.М. Использование спутниковых радионавигационных систем в геодезии [Текст] / К.М. Антонович // ГОУ ВПО «Сибирская государственная геодезическая академия». - М.: ФГУП «Картгеоцентр», 2006. - 360 с.],
- в качестве базовых станций в системе определения местоположения подвижных объектов в режиме реального времени выступают базовые станции вышек сотовой связи, координаты которых определяются в системе координат WGS - 84 с погрешностью, равной 1 метр [Пат. 2331082 Российская Федерация МПК51 G01S 5/02, H04B 7/26 Использование мобильных станций для определения параметров местоположения базовой станции в системе беспроводной мобильной связи [Текст] / У. Райли, Р. Джирерд, З. Биакс; заявители и патентообладатели: КВЭЛКОМ ИНКОРПОРЕЙТЕД. - 2004122913, заявл. 20.04.2005, опубл. 10.08.2008 - Бюл. №2. - 28 с.], в связи с чем, заявляемая в прототипе дециметровая точность определения местоположения подвижного объекта путем уточнения его методом триангуляции от не менее трех базовых станций вышек сотовой связи не может быть достигнута,
- в блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, не вводятся региональные модели ионосферы и тропосферы.
Техническая задача, решаемая предлагаемой системой точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, заключается в повышении точности и надежности определения местоположения (координат) подвижных объектов в режиме реального времени.
Поставленная задача достигается тем, что в системе точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, включающей спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), диспетчерскую станцию, содержащую геоинформационную систему, базовую станцию, подвижные объекты, оснащенные телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта, согласно изобретению в ней в качестве базовой станции используется сгенерированная сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС виртуальная базовая станция, расположенная на расстоянии 4 км 300 метров от соответствующего подвижного объекта, в качестве вышеупомянутого телеметрического терминала в системе используется устройство точной навигации, созданное на базе одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы вышеупомянутых глобальных навигационных спутниковых систем, подключенного к малогабаритному атомному стандарту частоты, в вышеупомянутом блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, введены региональные модели ионосферы и тропосферы, созданные в режиме реального времени, генерируемые сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС.
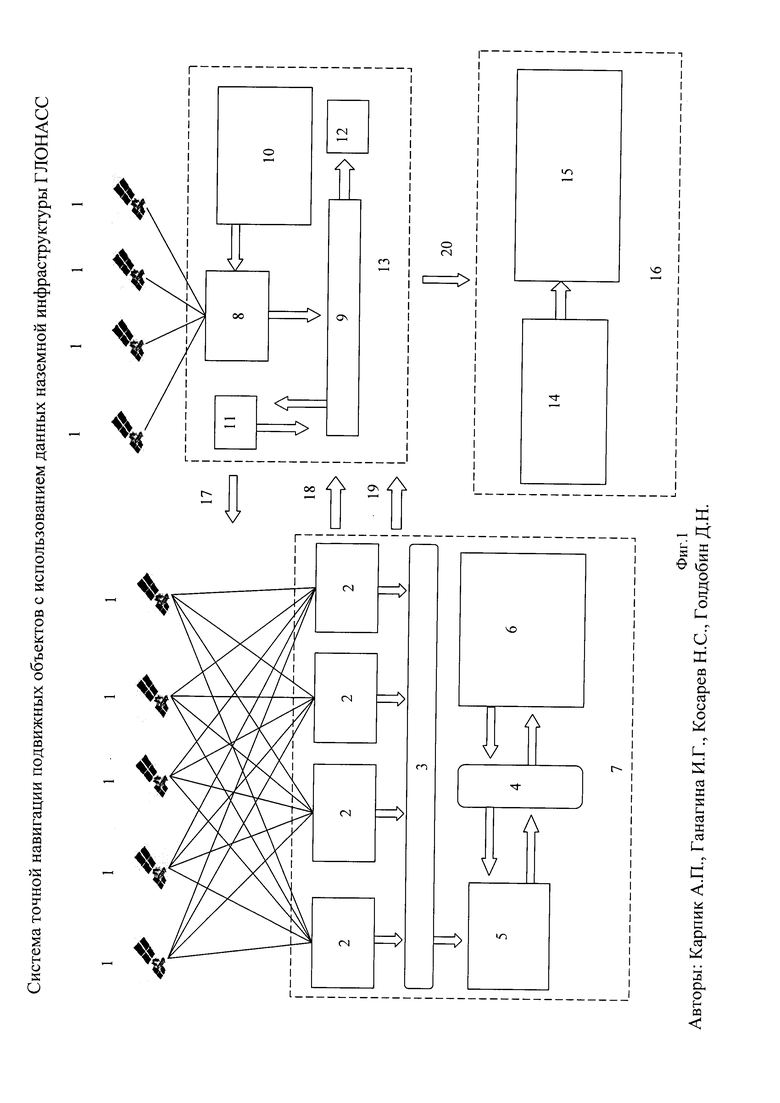
Предлагаемое изобретение поясняется схемой, представленной на фиг. 1, где:
1 - спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO);
2 - двухчастотные мультисистемные ГНСС приемники, принимающие сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO);
3 - оптоволоконные каналы связи;
4 - локальная сеть Интернет;
5 - сервер сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO);
6 - персональный компьютер с сетевым программным обеспечением;
7 - наземная инфраструктура ГЛОНАСС;
8 - одночастотный двухсистемный кодо-фазовый чип, принимающий сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO);
9 - блок обработки информации, поступающей с наземной инфраструктуры ГЛОНАСС и одночастотного двухсистемного кодо-фазового чипа, подключенного к малогабаритному атомному стандарту частоты;
10 - малогабаритные атомные стандарты частоты;
11 - телекоммуникационное оборудование, для приема и передачи данных между устройством точной навигации и наземной инфраструктурой ГЛОНАСС;
12 - телекоммуникационное оборудование, для передачи данных между устройством точной навигации и диспетчерской станцией;
13 - устройство точной навигации;
14 - сервер диспетчерской станции;
15 - персональный компьютер с геоинформационной системой;
16 - диспетчерская станция;
17 - приближенные координаты подвижного объекта;
18 - корректирующая информация, сгенерированная сетевым программным обеспечением;
19 - региональные модели тропосферы и ионосферы, сгенерированные сетевым программным обеспечением;
20 - точные координаты подвижного объекта.
Предлагаемая система работает следующим образом.
Каждый из устройств точной навигации 13, установленный на подвижном объекте, принимает сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) 1 с помощью одночастотного двухсистемного кодо-фазового чипа 8, подключенного к малогабаритному атомному стандарту частоты 10. Принятые одночастотным двухсистемным кодо-фазовым чипом 8, подключенным к малогабаритному атомному стандарту частоты 10, сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) поступают в блок обработки информации 9, в котором происходит вычисление приближенных координат подвижного объекта в системе WGS-84, на основе абсолютного метода ГНСС - позиционирования путем решения обратной линейной засечки. Эти координаты передаются с помощью телекоммуникационного оборудования 11, установленного на подвижном объекте, по широкополосному радиодоступу на сервер сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), 5 наземной инфраструктуры ГЛОНАСС 7.
Сетевое программное обеспечение, установленное на персональном компьютере, 6 по средствам локальной сети Интернет 4 соединяется с сервером сбора информации с двухчастотных мультисистемных ГНСС приемников, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) 5, для получения приближенных координат подвижного объекта в режиме реального времени. Сетевое программное обеспечение, установленное на персональном компьютере 6, на основе приближенных координат подвижного объекта 17 и данных наземной инфраструктуры ГЛОНАСС 7 генерирует виртуальную базовую станцию, расположенную на расстоянии 4 км 300 метров от соответствующего подвижного объекта, и рассчитывает для каждого подвижного объекта корректирующую информацию 18 и региональные модели тропосферы и ионосферы 19.
Для расчета корректирующей информации 18 и региональной модели тропосферы и ионосферы 19 с помощью наземной инфраструктуры ГЛОНАСС 7 в сетевое программное обеспечение 6 из сервера сбора информации 5 поступает измерительная информация, полученная по средствам оптоволоконного канала связи 3, от двухчастотных мультисистемных ГНСС приемников 2, принимающих сигналы спутников глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO) 1.
Корректирующая информация 18 и региональные модели тропосферы и ионосферы 19, сгенерированные сетевым программным обеспечением, передаются в устройство точной навигации 13, где регистрируются телекоммуникационным оборудованием 11, установленным на подвижном объекте. Затем корректирующая информация 18, региональные модели тропосферы и ионосферы 19, а также измерительная информация с одночастотного двухсистемного кодо-фазового чипа 8, подключенного к малогабаритному атомному стандарту частоты 10, поступают в блок обработки информации 9, в котором происходит вычисление точных координат 20 подвижного объекта в системе WGS-84. Вычисленные блоком обработки информации 9 точные координаты 20 подвижного объекта в системе WGS-84 передаются с помощью телекоммуникационного оборудования 12 в диспетчерскую станцию 16. Точные координаты 20 подвижного объекта в системе WGS-84 хранятся на сервере диспетчерской станции 16. С сервера диспетчерской станции 16 точные координаты передаются в геоинформационную систему, установленную на персональном компьютере 15, в которой визуализируется местоположение подвижного объекта.
Технический результат, достигаемый заявляемой системой точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, заключается в повышении достоверности информации о местоположении подвижного объекта в режиме реального времени.
При всей совокупности заявляемых признаков система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС может обеспечить погрешность определения местоположения подвижного объекта до 0,1 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС | 2017 |
|
RU2649628C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЕЙ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ РАЗМЕТКИ УЧАСТКОВ УЛИЧНО-ДОРОЖНОЙ СЕТИ | 2016 |
|
RU2633093C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ И СИСТЕМА БЫСТРОГО И ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2749667C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2010 |
|
RU2444705C1 |
Изобретение относится к области радиотехники и может быть использовано для навигации подвижных объектов в режиме реального времени. Технический результат состоит в повышении точности и надежности определения местоположения подвижных объектов в режиме реального времени. Для этого в системе точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, включающей спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), диспетчерскую станцию, содержащую геоинформационную систему, базовую станцию, подвижные объекты, оснащенные телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта, в качестве базовой станции используется сгенерированная сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС виртуальная базовая станция, расположенная на расстоянии 4 км 300 метров от соответствующего подвижного объекта, в качестве телеметрического терминала в системе используется устройство точной навигации, созданное на базе одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы глобальных навигационных спутниковых систем, подключенного к малогабаритному атомному стандарту частоты, введены региональные модели ионосферы и тропосферы, созданные в режиме реального времени, генерируемые сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС. 1 ил.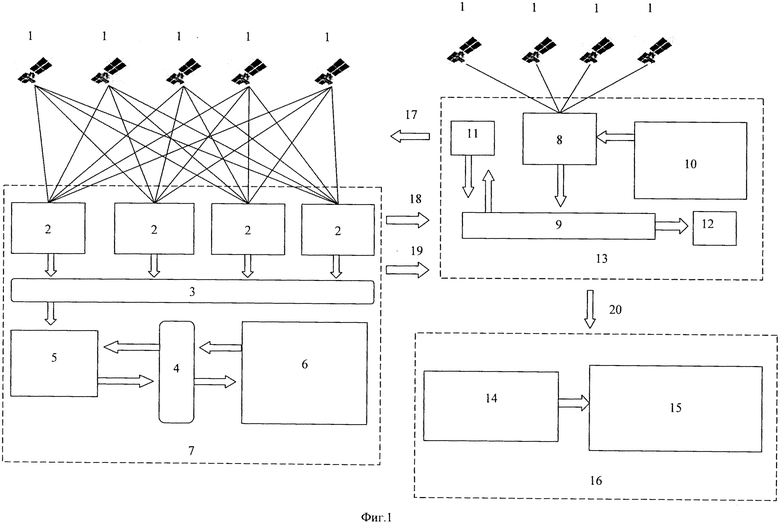
Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС, включающая спутники глобальных навигационных систем (ГЛОНАСС, GPS, GALILEO), диспетчерскую станцию, содержащую геоинформационную систему, базовую станцию, подвижные объекты, оснащенные телеметрическими терминалами, на которых установлено телекоммуникационное оборудование, обеспечивающее соединение базовой станции с подвижными объектами посредством широкополосного радиодоступа, блок обработки совместной информации, поступающей с базовой станции и подвижного объекта, отличающаяся тем, что в качестве базовой станции используется сгенерированная сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС виртуальная базовая станция, расположенная на расстоянии 4 км 300 метров от соответствующего подвижного объекта, в качестве вышеупомянутого телеметрического терминала в системе используется устройство точной навигации, созданное на базе одночастотного двухсистемного кодо-фазового чипа, принимающего сигналы вышеупомянутых глобальных навигационных спутниковых систем, подключенного к малогабаритному атомному стандарту частоты, в вышеупомянутом блоке обработки совместной информации, поступающей с базовой станции и подвижного объекта, введены региональные модели ионосферы и тропосферы, созданные в режиме реального времени, генерируемые сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС.
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2469890C2 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| СПОСОБ РАДИОНАВИГАЦИИ И РЕГИОНАЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2164694C2 |

