Изобретение относится к области сельского хозяйства, в частности к устройствам для приготовления грубых кормов в виде сенажа и силоса.
Известно устройство для приготовления кормов в виде силоса или сенажа, включающее в себя трактор или другую подобную силовую установку, оборудованную приемным бункером для зеленой массы, на выходе которого установлен питатель с форсунками для внесения консервантов и закреплен полимерный рукав большой емкости, служащий для накопления зеленой массы и последующего осуществления ее ферментации и хранения (см. описание машины компании «AG-Bag» - прототипа устройства, см. материалы Интернет сайта http://www.bag.ru/techno/).
Недостатками данного устройства является то, что оно не оборудовано датчиками состояния и регуляторами состояния кормовой массы в полимерном рукаве, что не позволяет обеспечить ее требуемые параметры по плотности и кислотности и тем самым сохранность и качество корма. Так, при больших размерах полимерного рукава и отсутствии регулирования плотности кормовой массы в полимерном рукаве появляется большое число воздушных пустот с большим содержанием кислорода, что приводит к появлению плесени и вредных грибков и потере кормов. Отсутствие контроля исходного состояния зеленой массы и кислотности кормовой массы в полимерном рукаве не позволяет установить оптимальное значение кислотности, обеспечивающее высокую сохранность и поедаемость корма. Кроме того, при нагнетании кормовой массы в полимерный рукав происходит отжим и вытекание в окружающую среду до 40% сока, с которым безвозвратно теряется большая доля легкорастворимых углеводов и сырого протеина, что приводит к снижению питательности и сохранности корма, а в результате к потере его качества.
Заявляемое устройство решает задачу повышения сохранности и поедаемости грубых кормов в виде силоса.
Заявляемое устройство, как и прототип, включает в себя трактор или другую подобную силовую установку, оборудованную приемным бункером для зеленой массы, на выходе которого установлен питатель с форсунками для внесения консервантов.
Заявляемое устройство отличается от прототипа тем, что оно оборудовано дополнительным бункером с дозатором сыпучего сорбирующего консерванта, а также прессовальной камерой, установленной на выходе приемного бункера, вслед за питателем зеленой массы, первой смесительной камерой, установленной за дозатором сыпучего сорбирующего консерванта, оборудованного исполнительным приводом, второй смесительной камерой, установленной между прессовальной и первой смесительной камерами, горизонтальной камерой уплотнения, установленной под второй смесительной камерой, при этом прессовальная камера оборудована вальцовым отжимным прессом, а в ее нижней части установлен сокосборник, соединенный трубопроводом, содержащим расходомер, с всасывающим патрубком насоса, напорный патрубок которого соединен с накопителем сока, соединенным трубопроводом с распылительной форсункой, установленной в первой смесительной камере, во второй смесительной камере установлены три форсунки для внесения консервантов, соединенные с коллекторным трубопроводом, к которому подключены дозаторы консервантов, соответственно ускоряющего или замедляющего процесс ферментации, а также консерванта, препятствующего процессу окисления силосной массы, кроме того, горизонтальная камера уплотнения оборудована поршневым рабочим органом, приводимым в действие электроприводом с кривошипно-шатунным механизмом, на выходе камеры уплотнения установлен шарнирно-телескопический рукав, выполненный с возможностью изменения места и уровня укладки готового корма в хранилище, кроме того, устройство оборудовано управляющим устройством.
В важном частном случае реализации устройства отличие от прототипа состоит в том, что управляющее устройство содержит блок определения заданий, первый и второй задающие блоки, блок задания температуры, первый, второй и третий блоки сравнения, блок моделирования, блок перестройки структуры управления, блок синтеза управляющих воздействий, регуляторы влажности и плотности кормовой массы, для контроля технологических параметров кормовой массы устройство оборудовано датчиком влажности и плотности кормовой массы, установленными в горизонтальной камере уплотнения, а также датчиками температуры и кислотности рН кормовой массы, установленными в телескопическом рукаве, и датчиком легкорастворимых углеводов, установленным в накопителе сока, при этом датчик влажности кормовой массы в управляющем устройстве одновременно подключен к входам блока определения заданий и первому входу регулятора влажности, ко второму входу которого подключен расходомер сока, а его выход соединен с приводом дозатора сыпучего сорбирующего консерванта, датчик кислотности выходной кормовой массы и датчик содержания легкорастворимых углеводов подключены к входам блока определения заданий, к выходам которого подключены первый и второй задающие блоки, выходы которых соединены с вычитающими входами первого и второго блоков сравнения, датчик кислотности выходной кормовой массы и датчик содержания легкорастворимых углеводов одновременно подключены и к входам блока моделирования, куда также подключен и датчик температуры, выходы блока моделирования подключены к суммирующим входам первого, второго и третьего блоков сравнения, к вычитающему входу третьего блока сравнения подключен блок задания температуры, а выходы первого, второго и третьего блоков сравнения, в свою очередь, подключены к входам блока перестройки структуры управления, сигнальный выход блока перестройки структуры управления соединен с входом блока синтеза управляющих воздействий, а его коммутирующие выходы соединены с пусковыми входами исполнительных приводов дозаторов консервантов, управляющие выходы блока синтеза управляющих воздействий соединены с исполнительными приводами дозаторов консервантов и вычитающим входом четвертого блока сравнения, к суммирующему входу которого подключен датчик плотности выходной кормовой массы, а его выход соединен с регулятором плотности, выход которого соединен с исполнительным приводом ходовых колес силовой установки.
Достигаемое от использования изобретения повышение сохранности и поедаемости кормов в виде силоса при любом произвольном сочетании качественных показателей исходного сырья и погодных условий обеспечивается тем, что устройство снабжено датчиками влажности и плотности кормовой массы, установленными в горизонтальной камере уплотнения, датчиками температуры и кислотности рН кормовой массы, установленными в телескопическом рукаве, а также датчиком легкорастворимых углеводов, установленным в накопителе сока, и оснащено управляющим устройством, содержащим блок определения заданий, блок моделирования, блок перестройки структуры управления, блок синтеза управляющих воздействий, и, кроме того, имеет соединенные с выходами управляющего устройства исполнительные приводы дозаторов консервантов и исполнительный привод ходовых колес силовой установки, что позволяет в зависимости от влажности, температуры и содержания легкорастворимых углеводов в исходной зеленой массе определить оптимальное заданное значение кислотности и содержания легкорастворимых углеводов, обеспечивающих наилучшую сохранность и поедаемость корма, затем спрогнозировать кислотность, температуру и содержание легкорастворимых углеводов, и по значениям этих прогнозов сначала определить требуемое направление процесса ферментации кормовой массы и по нему перестроить структуру управления, в результате чего принимается решение о выборе типа используемого консерванта, а затем определить оптимальное значение его расхода и воспроизвести этот расход путем воздействия на соответствующий исполнительный орган дозатора. Кроме того, по оперативной информации о плотности кормовой массы на выходе устройства изменением скорости движения устройства путем воздействия на исполнительный привод ходовых колес обеспечить удержание плотности на заданном уровне, а по оперативной информации о расходе отжатого из зеленой массы сока путем воздействия на привод дозатора за счет изменения расхода сыпучего сорбирующего консерванта обеспечить сохранение в кормовой массе всех питательных веществ.
Наличие в устройстве дополнительного бункера с дозатором сорбирующего консерванта, с вальцовым отжимным прессом и сборником отжатого сока позволяет обеспечить требуемую влажность кормовой массы при любой исходной влажности зеленой массы без потерь питательных элементов.
Наличие смесительной камеры с установленными в ней тремя форсунками для внесения консервантов, соединенных коллекторным трубопроводом с дозаторами консервантов, соответственно ускоряющего, замедляющего процесс ферментации, а также консерванта, препятствующего процессу окисления силосной массы, позволяет направить процесс ферментации кормовой массы в нужную сторону.
Наличие камеры уплотнения позволяет обеспечить требуемый диапазон плотности выходной кормовой массы при ее высокой объемной равномерности, что исключает порчу кормов при хранении, и формировать выходной поток кормовой массы в виде прямоугольной ленты, равномерно заполняющей объем хранилища кормовой массы без применения тяжелой трамбовочной техники, и тем самым исключить ее засорение, что повышает качество и сохранность корма.
Сущность изобретения поясняется чертежами, на которых:
на фиг.1 изображена общая технологическая схема устройства,
на фиг.2 - структурная схема управляющего устройства,
на фиг.3 - продольная схема укладки корма в хранилище,
на фиг.4 - план укладки корма в хранилище.
Конструкция устройства (фиг.1) включает в себя раму 1, которая посредством мостов 2 базируется на ходовой части, состоящей из опорных 3 и приводных колес 4, оборудованных ходовым исполнительным приводом 5. На раме 1 установлен приемный бункер 6 для накопления исходной кормовой массы. В нижней части приемного бункера установлен ротационный питатель с двумя рабочими роторами 7, вращающимися внутрь, навстречу друг другу. Привод роторов 7 на чертеже условно не показан. В выходной горловине приемного бункера, за роторами 7 установлен наклонный транспортер 8, обеспечивающий подачу кормовой массы в прессовальную камеру 9, оборудованную вальцовым отжимным прессом с двумя парами профилированных прессовальных вальцов 10, вращающихся внутрь, навстречу друг другу. В нижней части прессовальной камеры 9 установлен сокосборник 11, соединенный трубопроводом 12, оборудованным расходомером 13, с всасывающим патрубком насоса 14, напорный патрубок которого соединен с накопителем сока 15, соединенным трубопроводом 16 с распылительной форсункой 17, установленной в первой смесительной камере 18. На входе первой смесительной камеры 18 установлен дозатор сыпучего сорбирующего консерванта 19, оборудованный бункером 20 и исполнительным приводом 21. Первая смесительная камера 18 и прессовальная камера 9 сопряжены со второй смесительной камерой 22, в которой расположены форсунки для внесения консервантов 23, соединенные с коллекторным трубопроводом 24. К коллекторному трубопроводу 24 подключены дозаторы консервантов, соответственно ускоряющего 25 и замедляющего 26 процесс ферментации, и дозатора 27 для консервантов, препятствующих процессу окисления силосной массы. Дозаторы 25, 26, 27 оборудованы исполнительными приводами 28, 29, 30, посредством которых осуществляется изменение доз консервантов. Под второй смесительной камерой 22 расположена горизонтальная камера уплотнения 31, в которой может перемещаться, совершая возвратно-поступательное движение, уплотняющий рабочий орган 32, приводимый в действие посредством кривошипно-шатунного механизма 33 и привода, включающего в себя электродвигатель 34 и цепную передачу 35. На выходе камеры уплотнения 31 установлен шарнирно-телескопический рукав 36, посредством которого может изменяться место и уровень укладки готового корма в хранилище, объем которого ограничивается упорными стенками 37. Для контроля технологических параметров кормовой массы устройство оборудовано датчиком влажности 38 и плотности 39 выходной массы, установленными в горизонтальной камере уплотнения 31, и также датчиками температуры 40 и кислотности рН 41, установленными в телескопическом рукаве 36. При этом в качестве датчиков влажности 38 и плотности 39 кормовой массы могут использоваться частотные преобразователи, параметры колебаний которых зависят от влажности и плотности. Кроме того, в накопителе сока 15 установлен датчик легкорастворимых углеводов 42, выполненный в виде оптического индикатора, изменяющего цвет при взаимодействии с соком, спектр отражения которого зависит от содержания углеводов.
Управляющее устройство 43 (фиг.2) содержит блок определения заданий 44, первый 45 и второй 46 задающие блоки, блок задания температуры 47, первый 48, второй 49, третий 50 и четвертый 51 блоки сравнения, блок моделирования 52, блок перестройки структуры управления 53, блок синтеза управляющих воздействий 54, регуляторы влажности 55 и плотности 56. К входам управляющего устройства 43 подключены датчики 38, 39, 40, 41, 42 и расходомер 13, а к его управляющим выходам подключены исполнительные приводы 21, 28, 29, 30 дозаторов 19, 25, 26, 27, а также привод 5 ведущих колес 4 ходовой части устройства. Датчик влажности 38 выходной массы в управляющем устройстве 43 одновременно подключен к входам блока определения заданий 44 и регулятора влажности 55. К входу блока определения заданий 44 подключены также датчик кислотности выходной кормовой массы 41 и датчик содержания легкорастворимых углеводов 42. К выходам блока определения заданий 44 подключены первый 45 и второй 46 задающие блоки, выходы которых соединены с вычитающими входами первого 48 и второго 49 блоков сравнения. Датчик кислотности выходной кормовой массы 41 и датчик содержания легкорастворимых углеводов 42 одновременно подключены и к входам блока моделирования 52, куда также подключен и датчик температуры 40. Выходы блока моделирования 52 подключены к суммирующим входам первого 48, второго 49 и третьего 50 блоков сравнения, выходы которых, в свою очередь, подключены к входам блока перестройки структуры управления 53. Сигнальный выход блока перестройки структуры управления 53 соединен с входом блока синтеза управляющих воздействий 54, а коммутирующие выходы блока 53 соединены с пусковыми входами исполнительных приводов 28, 29, 30 дозаторов 25, 26, 27. Управляющие выходы блока синтеза управляющих воздействий 54 соединены с исполнительными приводами 28, 29, 30 дозаторов 25, 26, 27 и вычитающим входом четвертого блока сравнения 51. К суммирующему входу третьего блока сравнения 50 подключен блок задания температуры 47, к суммирующему входу четвертого блока сравнения 51 подключен датчик плотности выходной кормовой массы 39, а его выход соединен с регулятором плотности 56, выход которого соединен с исполнительным приводом 5 ходовых колес 4 устройства.
Управляющее устройство 43 реализует построенные на модели силосования алгоритмы управления силосованием, выраженные приведенными ниже в описании формулами. В качестве примера реализации устройства и его работы в динамике вместе с формулами приводятся частные численные значения параметров управления.
Устройство работает следующим образом. Перед началом работы устройство размещают непосредственно в хранилище, в котором будет храниться приготовленный корм (фиг.3, фиг.4). При этом устройство размещают таким образом, чтобы его телескопический рукав 36, установленный на минимальную длину, находился в непосредственной близости от стены хранилища 37. Исходную кормовую массу, которой может быть измельченная трава и зернофуражные культуры, загружают в приемный бункер 6 устройства. Из бункера 6 посредством роторных питателей 7 и наклонного транспортера 8 она подается в прессовальную камеру 9, где прессуется вальцами 10, и из нее выделяется сок, который посредством сокосборника 11 и насоса 14 подается в накопитель сока 15. При этом расход сока измеряется расходомером 13, сигнал которого поступает на вход управляющего устройства 43, а именно на вход регулятора влажности 55. При поступлении сигнала расходомера 13 на вход регулятора 55 на его выходе появляется управляющий сигнал, пропорциональный величине расхода сока, который, воздействуя на исполнительный орган 21, запускает дозатор 19 и устанавливает на его выходе расход сыпучего сорбирующего консерванта, достаточный для полного связывания избыточной влаги кормовой массы. В качестве сорбирующего консерванта могут применяться травяные или свекольные гранулы. Сорбирующий консервант поступает в первую смесительную камеру 18, куда за счет давления, развиваемого насосом 14, из накопителя сока 15 посредством форсунки 17 распыляется сок, который поглощается сорбирующим консервантом, и который затем поступает во вторую смесительную камеру 22, куда одновременно поступает отжатая кормовая масса из камеры прессования 9. Из второй смесительной камеры 22 кормовая масса поступает в камеру уплотнения 31, где за счет воздействия уплотняющего рабочего органа 32 происходит ее одновременное уплотнение и формирование ленты из уплотненной кормовой массы ориентировочным поперечным сечением 1,5×1,0 м, которая движется по телескопическому рукаву 36, достигая стены 37 хранилища. Одновременно с уплотнением и формированием ленты кормовой массы непрерывно во времени t измеряется ее плотность датчиком 39, сигнал которого u4(t) поступает на суммирующий вход четвертого блока сравнения 51, где он сравнивается с заданием u4 *(t), формируемым блоком синтеза управляющих воздействий 54. При плотности кормовой массы выше заданного значения u4(t)>u4 *(t) на выходе блока сравнения появляется положительный сигнал, поступающий на вход регулятора плотности 56, который включает привод 5 ходовых колес 4 и увеличивает скорость движения устройства до тех пор, пока сигнал датчика плотности 39 не сравняется с заданием, формируемым блоком 54. Если плотность кормовой массы ниже заданного значения u4(t)<u4 *(t), то на выходе блока сравнения 51 появится отрицательный сигнал, поступающий на вход регулятора плотности 56, который, воздействуя на привод 5 ходовых колес 4, уменьшит скорость движения устройства до тех пор, пока сигнал датчика плотности 39 не сравняется с заданием, формируемым блоком 54.
Периодически, через 1-2-часовые интервалы k, датчиком 42 измеряется содержание легкорастворимых углеводов в соке x1[k], (для рассматриваемого примера x1[k]=8,0%), датчиком 38 измеряется влажность выходной кормовой массы v1[k] (для рассматриваемого примера v1[k]=75%), датчиком 40 ее температура x3[k] (для рассматриваемого примера x3[k]=14°С), а датчиком 41 - ее кислотность (рН) x2[k] (для рассматриваемого примера x2[k]=4,0 ед. рН). Сигналы датчиков 38, 41, 42 поступают на вход блока определения заданий 44. Кроме того, сигналы датчиков 41 - x2[k] и 42 - x1[k] совместно с сигналом датчика температуры 40 - x3[k] поступают на вход блока моделирования 52.
При поступлении сигналов датчика 38 - v1[k], датчика 42 - x1[k], датчика 41 - x2[k] в блок определения заданий 44 по формуле модели режима силосования
d0+d1v1[k]+d2x2[k]=δ,
где d0, d1, d2 - параметры модели, определяющие режим силосования; для рассматриваемого примера d0=3.6857 ед. рН, d1=0,026 ед. рН/%, d2=-1,0 (безразмерн.); v1[k]=75% - сигнал датчика влажности 38, x2[k]=4,0 ед. рН - сигнал датчика кислотности кормовой массы 41, δ=1,4 ед. рН - заданное пороговое число рН,
в блоке 44 определяется заданное значение кислотности кормовой массы
 .
.
Для рассматриваемого примера: x2 *[k]=4,25 ед. pH.
По формуле модели поедаемости корма животными
c0+c1x1[k]+c2x2[k]=П*,
где с0, с1, с2 - параметры модели; для рассматриваемого примера: с0=72,96 (%), с1=0,88 (безразм.), с2=2,14 (%/ед. рН); П*=90% - заданное значение показателя поедаемости,
в блоке 44 определяется заданное значение содержания углеводов в выходной кормовой массе
 .
.
Для рассматриваемого примера x1 *[k]=9%.
Сигналы с выхода блока определения заданий 44 поступают на входы задающих блоков 45, 46, на выходах которых устанавливаются сигналы заданных значений соответственно содержания углеводов x1 *[k] и кислотности x2 *[k] кормовой массы. При поступлении сигналов датчика 42 - x1[k]=8,0%, датчика 41 - x2[k]=4,0 ед. рН и датчика 40 - x3[k]=14°С в блок моделирования 52 по формуле модели процесса ферментации прогнозируется содержание углеводов - х1[T], кислотности - х2[Т] и температуры кормовой массы - x3[T] на конец процесса ферментации k=Т. Для рассматриваемого примера прогнозные значения составляют х1[Т]=3,6%; х2[Т]=3,4 ед. рН; х3[Т]=22°С. Сигналы прогнозов х1[T], х2[T], x3[Т] поступают на суммирующие входы первого 48, второго 49 и третьего 50 блоков сравнения, на соответствующие вычитающие входы которых поступают сигналы задающих блоков, первого 45 и второго 46, а также блока задания температуры 47 (для рассматриваемого примера заданное значение температуры х* 3[Т]=18°С). На выходах блоков сравнения 48, 49, 50 формируются сигналы ошибок в управлении процессом ферментации по:
содержанию легкорастворимых углеводов  , для рассматриваемого примера ε1[T]=-5,4%;
, для рассматриваемого примера ε1[T]=-5,4%;
кислотности  , для рассматриваемого примера ε2[Т]=0,25 ед. рН;
, для рассматриваемого примера ε2[Т]=0,25 ед. рН;
температуре  , для рассматриваемого примера ε3[Т]=2,0°С,
, для рассматриваемого примера ε3[Т]=2,0°С,
которые поступают на входы блока перестройки структуры управления 53. В зависимости от знаков сигналов ошибок в блоке 53 происходит изменение структуры управления. Если прогнозное значение содержания углеводов меньше или равно заданному значению ε1[Т]≤0, а прогнозное значение кислотности больше заданного значения ε2[Т]>0, то в управлении используют консервант, тормозящий процесс ферментации, в качестве которого может использоваться уксусная или муравьиная кислота (что соответствует рассматриваемому примеру). При этом на коммутирующем выходе блока 53 появляется сигнал, подключающий исполнительный орган 28 дозатора 25 к блоку синтеза управляющих воздействий 54 и одновременно отключающий исполнительный орган 29 дозатора 26. Если прогнозное значение содержания углеводов больше заданного значения ε1[T]>0, а прогнозное значение кислотности меньше или равно заданному значению ε2[T]≤0, то в управлении используется консервант, ускоряющий процесс ферментации, в качестве которого могут служить молочнокислые бактерии и ферменты. При этом на коммутирующем выходе блока 53 появляется сигнал, подключающий исполнительный орган 29 дозатора 26 к блоку синтеза управляющих воздействий 54 и одновременно отключающий исполнительный орган 28 дозатора 25. При любых других сочетаниях прогнозных ошибок управления содержанием углеводов и кислотности консерванты не используются, и процесс ферментации происходит естественным образом, что приводит к отключению исполнительных органов 28, 29 от блока синтеза управляющих воздействий 54. Если прогнозное значение температуры больше заданного значения ε3[Т]>0 (что соответствует рассматриваемому примеру), то в управлении используется консервант, препятствующий окислению кормовой массы, и на коммутирующем выходе блока 53 появляется сигнал, подключающий исполнительный орган 30 дозатора 27 к блоку синтеза управляющих воздействий 54. Если прогнозное значение температуры меньше или равно заданному значению ε3[Т]≤0, то в управлении не используется консервант, препятствующий окислению кормовой массы (пропионовая кислота или бензонат натрия), и на коммутирующем выходе блока 53 появляется сигнал, отключающий исполнительный орган 30 дозатора 27 от блока синтеза управляющих воздействий 54. После того как была перестроена структура управления, сигналы прогнозных ошибок с сигнального выхода блока 53 поступают на вход блока синтеза управляющих воздействий 54, формирующего оптимальные дозы используемых консервантов и оптимальное значение плотности кормовой массы. Полученные значения управляющих воздействий по величинам доз консервантов (для рассматриваемого примера: расход муравьинной кислоты u1=42 г/тн; расход пропионовой кислоты u3=21 г/тн; плотность кормовой массы u4=0,746 т/м3) с выхода блока 54 поступают на исполнительные механизмы 28, 29, 30 дозаторов 25, 26, 27, а по величине плотности кормовой массы поступает в виде задания на суммирующий вход четвертого блока сравнения 51. Оптимальные дозы используемых консервантов от дозаторов 25, 26, 27 по трубопроводу 24 распыляются форсунками 23 в кормовую массу во второй смесительной камере 22, из которой она поступает в камеру уплотнения 31. Периодическое уточнение вида используемых консервантов и определение их оптимальных доз, как и оптимальной величины плотности кормовой массы в хранилище, позволяет оперативно учесть изменения свойств исходного растительного сырья и погодных условий. Укладка кормовой массы устройством в хранилище осуществляется посредством телескопического рукава 36 послойно (см. фиг.3, 4). Сначала формируется первый слой на длину захвата рукава 36, а затем рукав 36 поднимается на толщину формируемой ленты уплотненного корма и формируется второй и последующие слои, после чего положение устройства изменяется на ширину формируемой ленты уплотненного корма, и формируются следующие слои.
Заявляемое устройство позволяет одновременно обеспечить высокую сохранность корма (92-95%) на весь период кормления животных до нового урожая и заданный показатель его поедаемости (не ниже 90%) животными без привлечения дополнительных вкусовых добавок. Это позволяет уменьшить дозы употребления дорогостоящих кормов - концкормов, изготавливаемых на специальных заводах. Результатом этого является снижение себестоимости производства молока не менее чем на 20-25%, при одновременном увеличении срока жизни коров за счет увеличения доли грубых волокнистых кормов и реализации жвачной функции и исключения болезней рубца. Использование одного устройства, реализующего заявляемый способ, позволяет обслужить стадо животных до 1000 голов и получить экономию средств до 50 млн. руб. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СНАРЯЖЕНИЯ АРТИЛЛЕРИЙСКИХ БОЕПРИПАСОВ | 2017 |
|
RU2657034C1 |
| Система индивидуальной раздачи концентрированных кормов | 1990 |
|
SU1750520A1 |
| УСТРОЙСТВО ДЛЯ СИЛОСОВАНИЯ КОРМОВ | 2014 |
|
RU2566633C1 |
| УСТРОЙСТВО СОСТАВЛЕНИЯ ЭКОНОМИЧНОГО КОРМОВОГО РАЦИОНА И ЭКОНОМИЧНОГО КОРМЛЕНИЯ ЖИВОТНЫХ И ПТИЦ | 2010 |
|
RU2462864C2 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ ПОУКОСНОЙ КУЛЬТУРЫ НА ЗЕЛЕНЫЙ КОРМ В УСЛОВИЯХ ОРОШЕНИЯ И УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ РАСТВОРА БИШОФИТА | 2004 |
|
RU2271091C1 |
| Устройство для автоматизированного приготовления питательного раствора в теплице | 1990 |
|
SU1831997A1 |
| ПРЕПАРАТ ДЛЯ КОНСЕРВИРОВАНИЯ ФЕРМЕНТИРУЕМЫХ КОРМОВ | 2023 |
|
RU2822747C1 |
| РАЗМОЛЬНО-СМЕСИТЕЛЬНЫЙ БЛОК | 2002 |
|
RU2214139C1 |
| СПОСОБ ПРОИЗВОДСТВА ЗЕРНОКОРМОВЫХ СМЕСЕЙ ДЛЯ ЖИВОТНОВОДСТВА | 2011 |
|
RU2490860C1 |
| Установка для приготовления кормовых смесей | 1980 |
|
SU904654A1 |
Изобретение относится к кормопроизводству. Устройство оборудовано дополнительным бункером для сыпучего сорбирующего консерванта, системой сбора отжатого сока, прессовальной и смесительной камерами, системой дозаторов консервантов, уплотнителем с телескопическим укладчиком корма, датчиками режимных параметров и управляющим устройством, обеспечивающим автоматизированный выбор и стабилизацию оптимальных режимов силосования. Изобретение позволяет повысить сохранность и поедаемость корма. 1 з.п. ф-лы, 4 ил.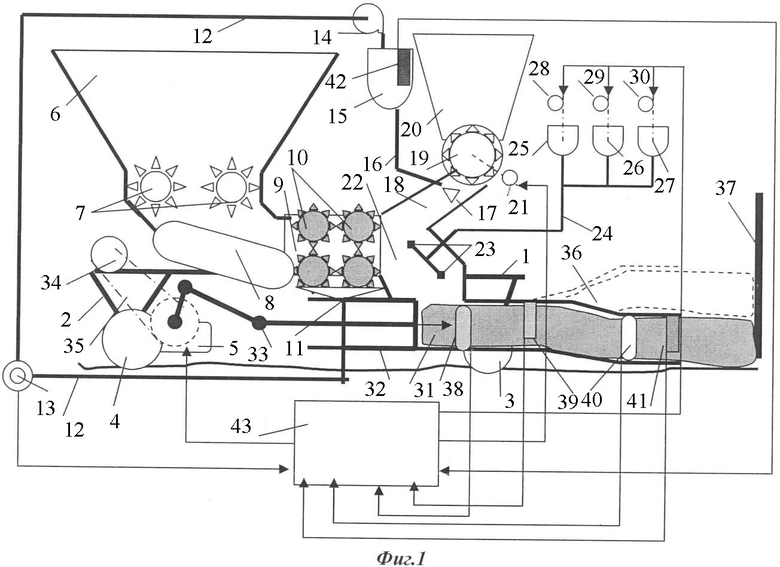
1. Устройство для приготовления грубых кормов, включающее в себя трактор или другую подобную силовую установку, оборудованную приемным бункером для зеленой массы, на выходе которого установлен питатель с форсунками для внесения консервантов, отличающееся тем, что устройство оборудовано дополнительным бункером с дозатором сыпучего сорбирующего консерванта, а также прессовальной камерой, установленной на выходе приемного бункера, вслед за питателем зеленой массы, первой смесительной камерой, установленной за дозатором сыпучего сорбирующего консерванта, оборудованного исполнительным приводом, второй смесительной камерой, установленной между прессовальной и первой смесительной камерами, горизонтальной камерой уплотнения, установленной под второй смесительной камерой, при этом прессовальная камера оборудована вальцовым отжимным прессом, а в ее нижней части установлен сокосборник, соединенный трубопроводом, содержащим расходомер, с всасывающим патрубком насоса, напорный патрубок которого соединен с накопителем сока, соединенным трубопроводом с распылительной форсункой, установленной в первой смесительной камере, во второй смесительной камере установлены три форсунки для внесения консервантов, соединенные с коллекторным трубопроводом, к которому подключены дозаторы консервантов, соответственно ускоряющего или замедляющего процесс ферментации, а также консерванта, препятствующего процессу окисления силосной массы, кроме того, горизонтальная камера уплотнения оборудована поршневым рабочим органом, приводимым в действие электроприводом с кривошипно-шатунным механизмом, на выходе камеры уплотнения установлен шарнирно-телескопический рукав, выполненный с возможностью изменения места и уровня укладки готового корма в хранилище, кроме того, устройство оборудовано управляющим устройством.
2. Устройство по п.1, отличающееся тем, что управляющее устройство содержит блок определения заданий, первый и второй задающие блоки, блок задания температуры, первый, второй и третий блоки сравнения, блок моделирования, блок перестройки структуры управления, блок синтеза управляющих воздействий, регуляторы влажности и плотности кормовой массы, для контроля технологических параметров кормовой массы устройство оборудовано датчиками влажности и плотности кормовой массы, установленными в горизонтальной камере уплотнения, а также датчиками температуры и кислотности рН кормовой массы, установленными в телескопическом рукаве, и датчиком легкорастворимых углеводов, установленном в накопителе сока, при этом датчик влажности кормовой массы в управляющем устройстве одновременно подключен к входам блока определения заданий и первому входу регулятора влажности, ко второму входу которого подключен расходомер сока, а его выход соединен с приводом дозатора сыпучего сорбирующего консерванта, датчик кислотности выходной кормовой массы и датчик содержания легкорастворимых углеводов подключены к входам блока определения заданий, к выходам которого подключены первый и второй задающие блоки, выходы которых соединены с вычитающими входами первого и второго блоков сравнения, датчик кислотности выходной кормовой массы и датчик содержания легкорастворимых углеводов одновременно подключены и к входам блока моделирования, куда также подключен и датчик температуры, выходы блока моделирования подключены к суммирующим входам первого, второго и третьего блоков сравнения, к вычитающему входу третьего блока сравнения подключен блок задания температуры, а выходы первого, второго и третьего блоков сравнения в свою очередь подключены к входам блока перестройки структуры управления, сигнальный выход блока перестройки структуры управления соединен с входом блока синтеза управляющих воздействий, а его коммутирующие выходы соединены с пусковыми входами исполнительных приводов дозаторов консервантов, управляющие выходы блока синтеза управляющих воздействий соединены с исполнительными приводами дозаторов консервантов и вычитающим входом четвертого блока сравнения, к суммирующему входу которого подключен датчик плотности выходной кормовой массы, а его выход соединен с регулятором плотности, выход которого соединен с исполнительным приводом ходовых колес силовой установки.
| RU 2070814 C1, 27.12.1996 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ГРУБЫХ КОРМОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2048118C1 |

