Изобретение относится к промышленному животноводству, предназначено, в первую очередь, для применения на молочных фермах и комплексах крупного рогатого скота, и может быть использовано в промышленном свиноводстве, овцеводстве и
Др.
Известны устройства для индивидуальной раздачи концентрированных кормов крупному рогатому скоту молочного направления.
Фирма Альфа-Лаваль (Швеция) предложила устройство индивидуального кормления коров концентрированным кормом, состоящим из двух компонентов. Устройство содержит бункера с кормом, транспортеры для подачи корма, кормовые станции и электронный блок управления восемью кормовыми станциями с клавиатурой для ввода информации, индикатором и цифролечата- ющим блоком. Устройство последовательно опрашивает кормовые станции и если в них находятся животные считывает номера и выдает заданные порции корма в кормушки каждой кормовой станции. Центральный блок в момент подключения к блоку управления кормовой станцией подает команду на выдачу порции и получает ответ об исполнении команды.
Недостатками этого устройства являются отсутствие достоверного сигнале о том, что порция корма выдана. Контроль ведется
VI
8
сл
hO О
по включению электропривода дозатора или по устройству регистрации оборотов шнека дозатора. В действительности же из- за плохой сыпучести корма могут образовываться своды и оборот шнека не приведет к подаче порции корма. Кроме того, устройство имеет низкое быстродействие и при изменении параметров комбикорма большую погрешность в нормировании корма.
Известно устройство Катл-Код Голландской фирмы Поиеш, Это наиболее со- вершенное современное устройство индивидуального нормирования корма. Идентификация производится в кормовой станции, С пульта централизованного управления группой кормовых станций осуществляется считывание номеров животных в кормовых станциях и задание программ кормления каждому опознанному животному.
Устройство имеет те же недостатки, что и фирмы Альфа-Лаваль, а именно, низкое быстродействие, отсутствие достоверного сигнала о поступлении корма в кормушку, трудность учета разных физико-механических свойств корма и большая сложность.
Известен патент ДЕ 28.55.000.А1. кл. А 01 К 5/02 - в кормовых станках при беспривязном содержании и в лотковых кормушках с привязыванием животных.
Недостатки - низкие точность и достоверность нормирования и выдачи корма.
Наиболее близкой является система автоматического управления кормлением животных, предназначенная для распознавания номера животного и выдачи ему предписанной дозы корма. В состав системы входят ошейник с номером, программное устройство и дозатор-задвижка с кормовым бункером. При подходе животного к кормушке магнитный датчик притягивает к программному устройству и оно выдает команду на выдачу индивидуальной дозы корма.
Недостатками прототипа являются недостаточная точность и низкое быстродействие в результате отсутствия обратной связи и неучета интенсивности поедания корма, что приводит к потерям корма и снижению продуктивности животных. 4 Цель изобретения - повышение точности и быстродействия выдачи корма, а также упрощение конструкции.
Поставленная цель достигается тем, что в каждом кормовом станке установлены датчики оборотов шнека дозатора, устройство управления кормовыми станками содержит формирователь сигнала включения и выключения электроприводов дозаторов и соединено через электрическую шину данных обратной связью с центральным программно-управляющим устройством.
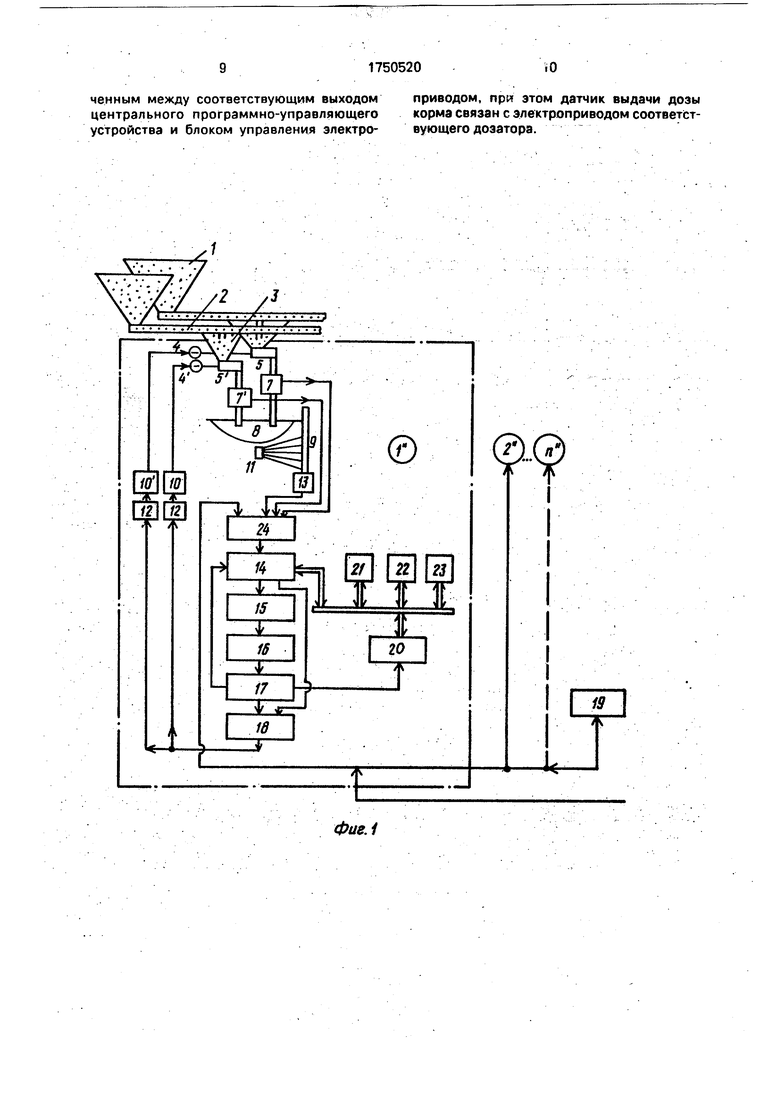
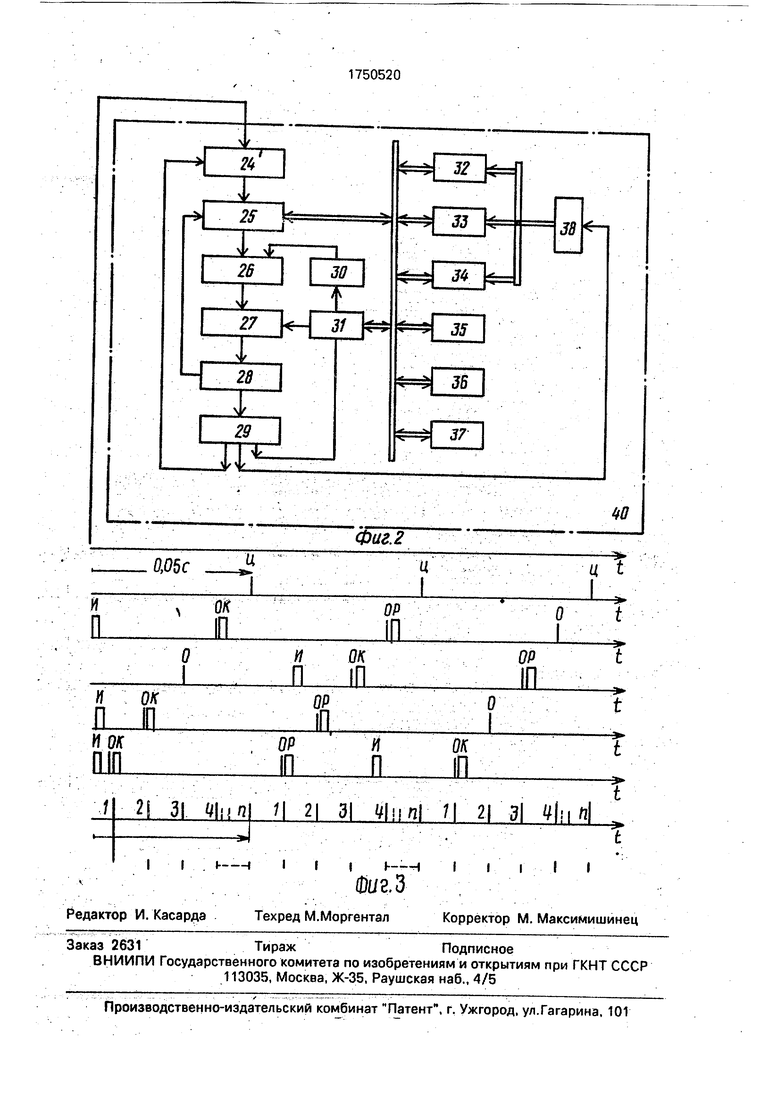
На фиг.1 и 2 представлена блок-схема системы индивидуальной раздачи концентрированных кормов; на фиг.З - временные диаграммы работы системы.
Система содержит кормовые станки с бункерами, кормушками; устройство управления кормовыми станками с дозаторами,
0 устройством идентификации; центральное программно-упраляющее устройство. Устройство управления кормовыми станками через электрическую шину данных соединено обратной связью с центральным про5 граммно-управляющим устройством. В каждом кормовом станке установлены датчики выдачи дозы корма (оборотов шнека дозатора).
Устройство управления кормовыми
0 станками содержит формирователь сигнала включения и выключения электроприводов дозаторов. Введена цепочка блоков: ариф- метическо-логический блок, блок адресации, памяти типа ПЗУ, блок приема и
5 дешифрации команд, формирователь команд, блок адресации и управления памятью, которые обеспечивают ввод в память сведений о числе порций корма, о времени выдачи одной порции, величине коэффици0 ента дозатора, заданий от центрального программно-управляющего устройства, об осуществлении логических операций и формировании команд управления.
Центральное программно-управляю5 щее устройство включает блоки связи, адресации, памяти типа ПЗУ, приема и дешифрации команд с формирователем управляющих команд; пульт управления, блок арифметическо-логического управления и
0 пульт управления через информационную шину связаны с тремя блоками памяти, входы которых параллельно соединены с блоком управления памятью. К информационной шине также параллельно подключены циф5 ропечать, тестер и магнитная память,
Система индивидуальной раздачи концентрированных кормов (фиг.1 и 2) содержит бункера 1 для хранения корма, возможно применение двух и более бункеров
0 для индивидуальной раздачи нескольких кормов в одну кормушку одному животному. Например, может выдаваться один концентрированный и один лечебный корм. Бункера 1 соединены с транспортерами 2, которые
5 направляют корм в отводные отростки кормопроводов, вставленные в бункере 3. установленные над кормовыми станциями. В бункерах кормовых станций поддерживается заданный уровень корма, обеспечивающий бесперебойную его подачу в дозаторы. Для поддержания уровня применяют датчики верхнего и нижнего уровня (как это сделано в прототипе) или устанавливают в бункерах 3 отростки кор- мопроводов заданной величины,как это по- казано на фиг.1, которые обеспечивают заполнение бункера кормовой станции до заданного уровня, соответствующего положению нижнего края отростка кормопровода. К бункерам 3,3 присоединены дозаторы 5,5 с электроприводами 4 и 4, которые последовательно соединены с кормопроводом 6 и б и кормушкой б, к которой периодически подходят животные. В кормовую станцию встроена система идентификации, состоящая из транспондеров 11, закрепленных на ошейнике каждого животного, приемо-передаю- щих антенн 9 и блока 13 идентификации.
Система идентификации через выход блока 13 соединена с арифметическо-логи- ческим блоком 14. Параллельно вход блока 14 соединен с выходами датчиков 7 потока корма, а выход блока 14 связан с блоком 15 адресации, к выходу которого подключена память типа ПЗУ 16, и выход ПЗУ соединен с блоком 17 приема дешифрации команд, а последняя - с формирователем 18 команд, который последовательно соединен с формирователем сигнала включения и выключения электроприводов 12, коммутатором 10, электроприводами 4 дозаторов и с ариф- метическо-логическим блоком 14.
Арифметическо-логический блок 14, в свою очередь, соединен с шинами трех памятей типа РАМ для хранения данных о числе порций корма 21, о времени выдачи одной порции 22 и о величине коэффициента дозатора 23. характеризующегося его конструктивные особенности по подаче корма.
Устройства памяти соединены с блоком адресации и управления памятью 20, который по входу соединен с блоком 17 приема и дешифрации команд. В целом схема 1 объединяет элементы управления одним кормовым станком. Таких станков в устройстве может быть 16. Все они однотипны. Параллельно с кормовыми станками включено внешнее управляющее устройство 19 верхнего уровня.
Все устройства управления кормовыми станциями 1 - 16 через второй блок 24 связи подключены к центральному управляющему устройству 40.
Блок 25 арифметическо-логического уп- равления центрального устройства соединен входами с блоками связи 24 и приема и дешифрации 28. а выходами - с блоком 26 адресации и информационной шиной 39. Вход блока адресации подключен к выходу
устройства 30 астрономического времени, которое выходом связано с пультом 31. Пульт соединен также с блоком ПЗУ 27 выход которого подключен к выходу блока 28 приема и дешифрации, в свою очередь подключенному выходом к формирователю 29 управляющих команд. Три выхода блока 29 соединены с входами блока 24. пульта 31 и блока 38 управления памятью. Выходы устройства памяти 32-34 соединены с информационной шиной 39, к которой подключены цифропечать 35, тестер 36 и магнитная память 37,
Таким образом, система индивидуальной раздачи кормов состоит из трех крупных подсистем: устройства управления кормовой станцией 1,центрального устройства управления группой (в рассматриваемом случае из 16 шт) станций и устройства 19 управления верхнего уровня. Все три подсистемы соединены электрической шиной данных и составляют общую электрическую систему Станции кормления 1 - 16 могут работать как от блока 40 так и от устройства 19. Такое соединение повышает гибкость и надежность системы. Это соединение несет в себе первое преимущество системы.
Вторым йовым положением является то, что в подсистеме 1 кормового станка применен датчик оборотов шнека дозаторов 7, который может быть выполнен импульсным на электромагнитном принципе или с использованием тахогенератора.
Третьим новым положением системы является то, что в схему введены формирователь сигнала включения и выключения электропривода дозатора 12 в работу и коммутатор цепи 10. Эти устройства дают возможность точно задавать время включенного положения электропривода и вводить коррективы, если изменились физико-механические свойства корма, его влажность, сыпучесть, физико-механический состав. Тогда за один оборот шнека дозатора или за 1 с его работы будет выдаваться разное количество корма в порции. Чтобы устранить этот недостаток применен формирователь сигнала. При изменении физико-механических свойств время удлиняется или укорачивается и все это делается автоматически центральным устройством 19 или 40.
Четвертым новым положением является то, что в схему управления кормовым станком введена цепочка элементов 14-20. Они обеспечивают ввод в память 21-23 заданий от центрального программно-управляющего устройства 40, осуществление логических операций блоком 14 и формирование команд управления блоком 18. Введение этой цепочки элементов обеспечивает возможность осуществления автономной работы каждой станции кормления, а именно: идентификацию животных, формирование доз корма для дозаторов 5 и 5 и более, прием ответных сигналов, отсчет пауз времени для поедания животным корма.
Устройство работает следующим образом. Животные произвольно заходят в кормовые станции 1,2,3,4..., которые прстоянно включены и готовы к работе. Центральное программное управляющее устройство 40 опрашивает кормовые станции 1,2,3,4... с равными циклами в соответствии с диаграммой на фиг,2.
В первый цикл опроса в станции 1 опрашивается есть ли идентификация И. В мо- мент времени 0 она считывается центральным устройством 40 и в устройство управления 1 передается программа К на выдачу корма. После проведения опроса всех станций во 2 цикле производится проверка Р выдачи корма, затем в новом цикле опроса производится идентификация. Если появилось новое животное (изменился номер), то вновь передается программа на выдачу корма.
По получении программы кормления в системе управления кормовой станции 1 осуществляется автономный режим управления.
Из блока 21 памяти выбираются данные о количестве корма, подлежащего выдаче; из блока 22 памяти - время выдачи одной порции с учетом изменившихся физико-механических свойств корма; из блока 23 - коэффициенты, характеризующие точностные характеристики дозаторов 5,5 и др.
Далее в блоках 14-17 эта информация обрабатывается, в блоке 18 формируются управляющие сигналы на выдачу корма. Формирователи сигнала включения и выключения дозаторов 12 и 12 формируют сигнал включения дозаторов и коммутационной аппаратурой 10 и 10, подключают их к источнику питания. При этом выдается порция корма. Датчики 7 и 7 фиксируют выдачу порции и сигнализируют об этом в блок 14. Далее устройством 1 устанавливается пауза для поедания корма. В зависимости от величины порции 100-250 г устанавливается пауза 15-45 с. Цикл работы устройства 1 окончен.
После того, как пауза закончена, открывается вход устройства 14 для приема нового задания. Устройство 40 вновь опрашивает кормовую станцию, где производится идентификация. Если в станции находится то же животное и номер сохраняется, устройство 40 из памяти 32-34 выбирает программу для загрузки в устройство 1 нового задания. Поступает задание на выдачу второй порции корма, на время включения дозатора с учетом его технической
характеристики и физико-механических свойств корма. Устройство 1 вновь формирует необходимый интервал времени включения дозаторов 5,5 и других (если они имеются), подает управляющее воздействия. Датчики 7 и 7 фиксируют выдачу порции и устройство 1 задает паузу для поедания корма. Далее цикл повторяется до тех пор, пока животное выйдет из станка или съест свой корм, положенный ему по программе в заданный интервал времени (утро, полдень, вечер).
Задания для работы кормовых станций может выдавать и устройство 19 верхнего уровня управления, чем обеспечивается высоконадежная работа.
Таким образом, система индивидуальной раздачи концентрированных кормов обеспечивает индивидуальную выдачу двух и более компонентов корма в одну кормушку, достоверный контроль подачи корма, гибкую перестройку системы при изменении физико-механических свойств корма и разбросе технических параметров дозаторов корма. При этом обеспечивается высокая автономность работы кормовой станции и возможность ее развития для применения многокомпонентных кормов.
Система позволяет повысить точность и быстродействие выдачи корма, а также упростить конструкции.
Формула изобретения Система индивидуальной раздачи концентрированных кормов, содержащая
транспортеры загрузки корма, сообщенные посредством бункеров с кормушками, устройство управления кормовыми станками, включающее для каждой кормушки дозатор с электроприводом и блоком его управления, блок идентификации и центральное программно-управляющее устройство, к соответствующим входам которого подключен выход блока идентификаци, отличающаяся тем, что, с целью повышения
точности и быстродействия кормораздачи, система снабжена блоком данных о числе порций корма, блоком времени выдачи одной порции и блоком коэффициента дозатора, связанным с системой шиной данных
центрального программно-управляющего устройства, а устройство управления кормовыми стенками снабжено для каждой кормушки датчиком выдачи дозы корма и формирователем сигнала включения и отключения электропривода дозатора, вклюценным между соответствующим выходом центрального программно-управляющего устройства и блоком управления электроприводом, при этом датчик выдачи дозы корма связан с электроприводом соответствующего дозатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Устройство индивидуальной раздачи кормов | 1989 |
|
SU1782497A1 |
| Устройство для автоматической раздачи корма | 1980 |
|
SU897187A1 |
| Устройство для управления дозатором кормораздатчика | 1986 |
|
SU1355959A1 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ КОРМА | 1991 |
|
RU2009639C1 |
| Устройство для порционного кормления животных | 1986 |
|
SU1375204A1 |
| ДОЗАТОР КОНЦЕНТРИРОВАННЫХ КОРМОВ | 1992 |
|
RU2060650C1 |
| Животноводческая ферма | 1986 |
|
SU1311675A1 |
| Автоматический дозатор кормов | 1988 |
|
SU1644845A1 |
Использование: относится к промышленному животноводству, а именно предназначено для применения на молочных фермах и комплексах крупного рогатого скота. Сущность изобретения: в кормовом стане установлены датчики оборотов шнека дозатора. Устройство управления кормовыми станками через электрическую шину соединено обратной связью с центральным программно-управляющим устройством. В устройство управления кормовыми станками введены элементы: формирователь сигнала включения и выключения электроприводов, блок адресации, паять типа ПЗУ, блок приема и дешифрации команд,, формирователь кома нд, блок адресации и управления памятью, которые обеспечивают ввод в память сведений о числе порций корма, о времени выдачи одной порции и о величине коэффициента дозатора заданий от центрального программно-управляющего устройства. Центральное программно-управляющее устройство управляет подачей корма через кормопроводы к каждому кормовому станку в зависимости от номера места животного. 3 ил. сл с
3
Фиг.1
Ж
20
| Патент США № 4426955, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
