Использование: для управления вертолетом путем изменения циклического шага лопастей несущего винта беспилотных малоразмерных вертолетов.
Сущность: регулируемая механическая система управления и стабилизации многолопастного несущего винта вертолета представляет собой узел, состоящий из гироскопа и лопаток управления. Гироскоп закреплен на валу несущего винта при помощи универсального шарнира и вращается со скоростью вращения несущего винта. Гироскоп представляет собой кольцо с прикрепленными к нему стержнями, на которых зафиксированы грузы, а также демпфирующие и управляющие лопатки. Грузы можно располагать и фиксировать на различном расстоянии от оси вращения несущего винта, тем самым изменяя степень способности гироскопа противодействовать отклонению плоскости концов лопастей несущего винта от плоскости гироскопа. Ось лопаток проходит через точку качания и кольцо гироскопа. Лопатки управления могут изменять угол установки, поворачиваясь на оси под действием тяг, соединенных либо непосредственно, либо через систему качалок с автоматом перекоса. Эту систему можно применять для несущих винтов с любым количеством лопастей, когда усилий имеющихся исполнительных механизмов недостаточно для управления непосредственно лопастями несущего винта, а также существует необходимость в механической регулировке моментов инерции гироскопа.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Регулируемая механическая система управления и стабилизации многолопастного несущего винта вертолета.
Изобретение относится к системам управления и представляет собой регулируемую механическую систему управления и стабилизации, включенную в каналы управления циклическим шагом многолопастного вертолетного несущего винта.
Известная установка, Патент Великобритании №1027011, кл. В64С 27/54, 1966 (1), содержит несущий винт с шарнирно установленными в закрепленной на валу втулке лопастями, снабженными поводками для изменения угла атаки, автомат перекоса с наружным соединенным с валом и внутренним неподвижным кольцами, движок изменения общего шага, причем последний и неподвижное кольцо связаны с блоком управления, гироскопический стабилизатор с укрепленными на радиальных штангах лопатками, связанный шарнирными тягами с поводками лопастей. К ее недостаткам могут быть отнесены использование только для двухлопастных несущих винтов и большие усилия в системе управления, что может сделать невозможным ее применение на беспилотных вертолетах с исполнительными механизмами ограниченной мощности. Известна система стабилизации вертолета аналогичной конструкции, патент RU 2061626 С1, кл. 6 В64С 27/605(2), которая по совокупности существенных признаков и технической сущности наиболее близка к данному изобретению и выбрана поэтому в качестве прототипа. По сравнению с системой (1) данная конструкция имеет серволопатки и дает возможность применять ее для многолопастных винтов. К ее недостаткам может быть отнесена большая масса и большой период затухания колебаний гироскопа после воздействия возмущений.
В настоящем изобретении конструкция имеет меньшую массу, высокую степень затухания колебаний гироскопа и более простую конструкцию подвеса кольца гироскопа. Недостатки устранены уменьшением количества стержней, относящихся только к гироскопу, с трех до двух, использованием оси управляющих лопаток в качестве недостающего стержня гироскопа и одновременно в качестве опоры кольца гироскопа, а также закреплением на концах стержней гироскопа грузов в форме лопаток с фиксированным углом установки.
Таким образом, по сравнению с ближайшим аналогом данное изобретение обладает новизной, причем совокупность отличительных признаков не следует явным для специалиста образом из источников, соответствующих уровню современной техники. Что касается промышленной применимости, то она доказывается приведенным ниже описанием и применением настоящего изобретения в одном из проектов автора. Следовательно, данное изобретение соответствует всем трем условиям патентоспособности.
На фиг.1 приведена схема регулируемой механической системы управления и стабилизации, являющейся предметом настоящего изобретения. Узел крепления лопастей к приводному валу (втулка несущего винта) изображен для демонстрации коммутирования регулируемой механической системы управления и стабилизации и не является предметом настоящего изобретения. На фиг.2 показана схема сборки регулируемой механической системы управления и стабилизации.
Позиции на фиг.1 и 2 означают: 1 - вилка крепления гироскопа, 2 - полуось, 3 - шайба, 4 - подшипник, 5 - крестовина, 6 - кольцо гироскопа, 7 - распорная втулка, 8 - ось лопаток управления, 9 - поводок лопаток управления, 10 - лопатки управления, 11 - шаровая опора, 12 - стержень гироскопа, 13 - зафиксированная лопатка гироскопа, 14 - регулировочный груз, 15 - наконечник тяги, 16 - тяга, 17 - качалка, 18 - поводок лопасти несущего винта, 19 - тяга к автомату перекоса, 20 - тяга к механизму изменения общего шага.
Регулируемая механическая система управления и стабилизации имеет вилку гироскопа 1, жестко связанную с валом привода несущего винта. К вилке 1 прикреплены полуоси 2, на которых через подшипники 4 установлена крестовина универсального шарнира 5. Сквозь крестовину 5 перпендикулярно полуосям 2 через подшипники 4 установлена ось лопаток управления 8. На ось 8 через подшипники 4 установлено кольцо гироскопа 6, положение которого на оси задается распорными втулками 7. На ось 8 снаружи кольца гироскопа устанавливаются поводки управления управляющими лопатками 10, положение которых на оси задается распорными втулками 7. После этого на ось 8 устанавливаются лопатки управления 10. На кольцо гироскопа 6 устанавливаются шаровые опоры 11, причем количество и угол развала между ними определяется количеством лопастей несущего винта. На кольцо гироскопа 6 устанавливаются стержни гироскопа 12, а на них - неподвижные лопатки гироскопа 13. На ось 8 и стержни 12 устанавливаются грузы 14, регулирующие моменты инерции гироскопа.
Регулируемая механическая система управления и стабилизации работает следующим образом. Изменение угла установки лопаток 10 во время вращения несущего винта приводит к появлению на них аэродинамических сил, воздействующих на гироскоп, что приводит к постепенному изменению его положения в пространстве и передает управляющий сигнал с шаровых опор 11 на качалки 17 на поводках лопастей несущего винта 18. Таким образом, производится циклическое управление несущим винтом. С другой стороны, изменение положения несущего винта, связанное с воздействием окружающей среды, сталкивается со стремлением гироскопа вернуть несущий винт в исходное положение. Качалка 17 вследствие изменения положения несущего винта пытается воздействовать на кольцо гироскопа 6, но из-за его противодействия вынуждена повернуться и изменить угол установки поводка, а значит и лопасти таким образом, чтобы вследствие изменившихся аэродинамических сил лопасть вернулась к исходному положению. Поэтому можно говорить, что гироскоп посредством подачи демпфирующего сигнала на качалки поводков лопастей сопротивляется изменению положения несущего винта. Управляющий или демпфирующий сигнал снимается с гироскопа при помощи тяг, прикрепленных посредством шаровых опор к кольцу гироскопа в плоскости, проходящей через его точку качания, и предается на качалки, расположенные на поводках лопастей несущего винта.
Использование опоры кольца гироскопа на ось управляющих лопаток, а не на корпус крестовины позволяет сделать узел гироскопа компактным, что снижет массу агрегата. Уменьшение количества стержней также ведет к снижению массы конструкции, а установка на концах стержней гироскопа лопаток с фиксированным шагом позволяет получить достаточно быстрое затухание колебаний гироскопа после воздействия возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМАЯ МЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ МНОГОЛОПАСТНОГО НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2008 |
|
RU2400397C2 |
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| ВТУЛКА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2007 |
|
RU2363620C2 |
| Втулка несущего винта | 2023 |
|
RU2798585C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2004 |
|
RU2263048C2 |
| Главный редуктор соосной схемы привода несущих винтов легкого или сверхлегкого вертолета | 2023 |
|
RU2824002C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
Изобретение относится к системам управления несущего винта вертолета. Механическая система состоит из гироскопа и лопаток управления, включенных в каналы управления циклическим шагом многолопастного вертолетного несущего винта. Гироскоп закреплен на валу несущего винта при помощи универсального шарнира и вращается со скоростью вращения несущего винта. Гироскоп представляет собой кольцо с прикрепленными к нему двумя стержнями, на которых зафиксированы грузы, а также демпфирующие и управляющие лопатки. Ось лопаток проходит через точку качания и кольцо гироскопа. Лопатки управления установлены с возможностью изменения угла установки при повороте на оси под действием тяг, соединенных либо непосредственно, либо через систему качалок с автоматом перекоса. Изобретение направлено на снижение массы конструкции. 2 ил.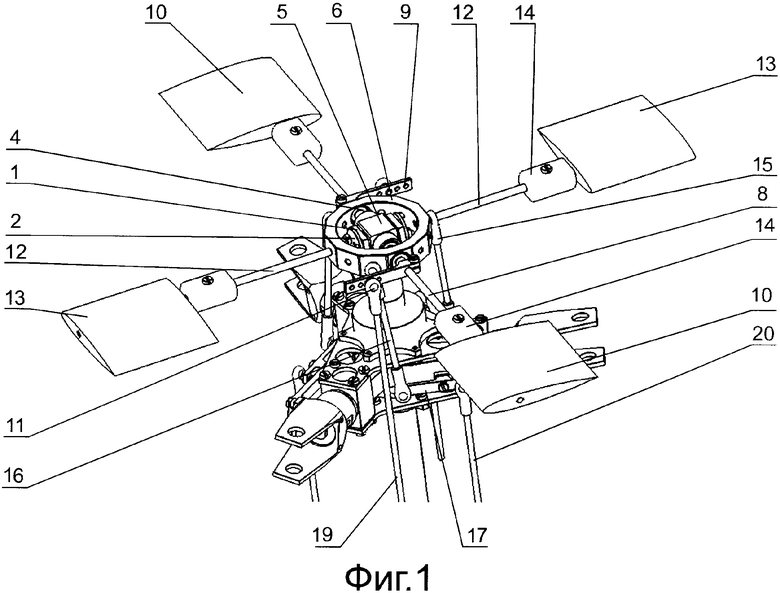
Регулируемая механическая система управления и стабилизации многолопастного несущего винта вертолета, содержащая качалки поводков лопастей несущего винта, гироскоп, включающий кольцо, три стержня и грузы, предназначенные для регулирования моментов инерции гироскопа, лопатки управления, ось которых установлена сквозь крестовину универсального шарнира, при этом ось лопаток управления посредством поводков и тяг соединена с автоматом перекоса несущего винта, отличающаяся тем, что кольцо гироскопа шарнирно установлено непосредственно на оси лопаток управления, при этом количество стержней гироскопа равно двум и на них установлены зафиксированные лопатки гироскопа.
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| Устройство для подачи немагнитных токопроводящих деталей | 1982 |
|
SU1027011A1 |
| US 3700350 A, 24.10.1972. | |||

