Изобретение относится к авиационной технике, а именно к системам несущих винтов летательных аппаратов, в том числе к дистанционно-пилотируемым летательным аппаратам.
Известны дистанционно-пилотируемые вертолеты малого класса (со взлетной масой до 100 кг), все они оснащены несущим винтом (НВ) типа Хиллер. Этот винт имеет только две лопасти, что объясняется сложностью компоновки лопастей с серволопатками - обязательным для этой схемы винта элементом управления. Однако нагрузка на сметаемую площадь такого НВ составляет от 7 до 10 кг/м2, поскольку мало заполнение лопастей (отношение площади лопастей к сметаемой площади НВ). Для получения максимальной тяги целесообразно увеличение заполнения при возможно меньших углах установки лопастей. Увеличение заполнения не может быть достигнуто за счет увеличения площади каждой лопасти, так как при этом пропорционально квадрату хорды лопасти увеличивается шарнирный момент лопасти и растут усилия в системе управления. Путем увеличения числа лопастей можно обеспечить допустимую величину усилий в системе управления с одновременным снижением уровня вибраций и увеличить нагрузку до 15-16 кг/м2.
В патенте RU 2061626 С1, который принят в качестве прототипа, представлен НВ с четырьмя лопастями. Однако предложенная схема управления этим винтом не обеспечивает достижения поставленной цели, поскольку в схеме прослеживается нарушение синхронности взаимодействия каналов управления циклическим шагом и общим шагом НВ.
Известны также хвостовые четырехлопастные винты вертолетов Ми-28 (Россия) и АН-64 (США). Характерной особенностью их конструкции является Х-образное взаимное расположение одной пары лопастей по отношению к другой паре, что обеспечивает существенное снижение величины шума. (1. Статистические данные зарубежных вертолетов. ЦАГИ, ОНТИ, Обзор №678 - 1988 г. 2. Конструкторский каталог винтокрылых аппаратов. Казанский ГТУ, Казань, 1996 г.)
Целью предлагаемого изобретения является увеличение нагрузки на НВ, увеличение тяги НВ без увеличения шарнирных моментов лопастей и усилий в системе управления, снижение величины шума от НВ, обеспечение рациональной компоновки элементов управления, унификация втулок, лопастей и элементов управления двух НВ равного диаметра, но имеющих различное количество лопастей, снижение уровня вибраций.
Поставленная цель достигается тем, что несущий винт вертолета, содержащий вал и втулку, четыре лопасти, закрепленные попарно на противоположных рукавах втулки посредством осевого шарнира, поводок лопасти с суммирующей качалкой, серволопатки, стержень и поводки серволопаток, стержень связан с валом через осевые шарниры и горизонтальный шарнир, автомат перекоса с вращающимся и невращающимся кольцами, установленный на валу с помощью универсального шарнира, элемент управления углом установки лопасти по общему шагу, тяги, связывающие невращающееся кольцо автомата перекоса с блоком управления вертолетом, тяги, связывающие вращающееся кольцо с элементами управления углом установки лопастей, отличается тем, что продольные оси пар лопастей расположены под острым углом друг к другу, каждая пара лопастей имеет свою пару серволопаток, автомат перекоса имеет возможность перемещения вдоль вала, каждая суммирующая качалка поводка лопасти одним своим плечом связана с вращающимся кольцом автомата перекоса, другим плечом со стержнем серволопатки, ползушку, снабженную четырьмя дифференциальными качалками, каждая качалка одним своим плечом связана с вращающимся кольцом АП, другим плечом - с поводком серволопатки.
На чертеже изображена кинематическая схема несущего винта.
Несущий винт содержит вал 1 и втулку 2, лопасти 3, закрепленные попарно на противоположных рукавах втулки 2 посредством осевого шарнира 4. На корпусе осевого шарнира установлен поводок 5 лопасти, на конце которого имеется суммирующая качалка 6. Каждая пара лопастей имеет свою пару серволопаток 7, размещенных под втулкой 2 на стержнях 8. Стержни связаны с валом 1 через осевые шарниры 10 и общий горизонтальный шарнир 11. На стержне закреплены поводки 12 серволопаток.
Автомат перекоса имеет вращающееся 13 и невращающееся 14 кольца, установлен на валу 1 с помощью универсального шарнира. Ползушка 15 установлена на валу 1 с возможностью перемещения вдоль вала, на ней закреплены четыре дифференциальные качалки 16.
Каждая суммирующая качалка 6 поводка 5 лопасти одним своим плечом связана через тягу 17 с вращающимся кольцом 13 автомата перекоса, а другим плечом - через тягу 18 со стержнем 8. Качалки 16 ползушки 15 одним плечом связаны тягами 19 и 20 с вращающимся кольцом 13 автомата перекоса, другим плечом - тягами 21 с поводками 12 серволопаток. Невращающееся кольцо 14 автомата перекоса связано тягами 22 с блоком управления вертолета.
Изменение общего шага лопастей производится перемещением автомата перекоса вдоль вала НВ за счет синхронного движения тяг 22. Это движение с помощью тяг 17 передается на суммирующие качалки 6 и поводки 5 с соответствующим поворотом лопастей НВ на одинаковый угол.
Управление циклическим шагом лопастей несущего винта осуществляется по двум каналам. По первому каналу циклическое изменение угла установки лопасти осуществляется теми же тягами и качалками, что и по общему шагу, с той лишь разницей, что имеет место азимутальное изменение углов установки лопастей за счет наклонного положения автомата прекоса. По второму каналу циклическое изменение угла установки лопасти осуществляется с помощью серволопаток 7. Наличие угла наклона автомата перекоса приводит к циклическому отклонению качалок 16 ползушки 15, через тяги 21 воздействие на поводок 12 приводит к маховому движению серволопаток, которое через стержни 8 и тяги 18 передается на качалки 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2005 |
|
RU2307766C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
Изобретение относится к авиационной технике, а именно к системам несущих винтов летательных аппаратов, в том числе к дистанционно-пилотируемым летательным аппаратам. Несущий винт содержит вал и втулку, четыре лопасти, закрепленные попарно на втулке через осевой шарнир под острым углом между парами лопастей, поводок лопасти с суммирующей качалкой. Две пары серволопаток со стержнями и поводками связаны с валом через шарниры. Автомат перекоса установлен на валу с помощью универсального шарнира и имеет вращающееся и невращающееся кольца. На валу установлена ползушка, с возможностью перемещения вдоль вала, снабженная четырьмя дифференциальными качалками. Каждая качалка одним своим плечом связана с вращающимся кольцом автомата перекоса, другим плечом - с поводком серволопатки. Технический результат - увеличение нагрузки и тяги на несущий винт без увеличения шарнирных моментов лопастей и усилий в системе управления, снижение величины шума и обеспечение рациональной компоновки элементов управления. 1 ил.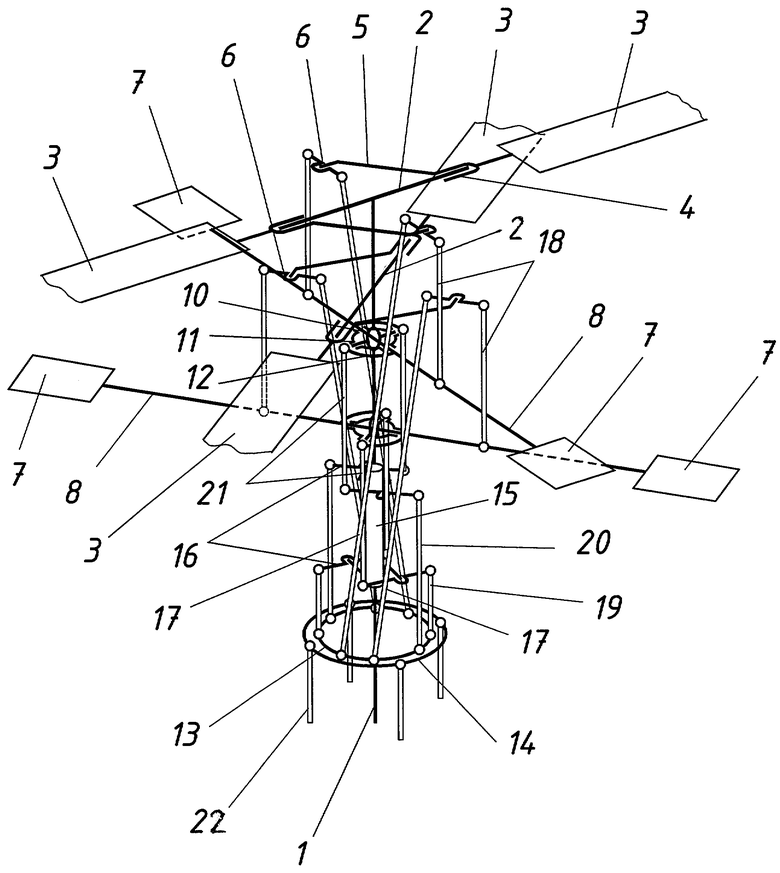
Несущий винт вертолета, содержащий вал и втулку, четыре лопасти, закрепленные попарно на противоположных рукавах втулки посредством осевого шарнира, поводок лопасти с суммирующей качалкой, серволопатки, стержень и поводки серволопаток, стержень связан с валом через осевые шарниры и горизонтальный шарнир, автомат перекоса с вращающимся и невращающимся кольцами, установленный на валу с помощью универсального шарнира, элемент управления углом установки лопасти по общему шагу, тяги, связывающие невращающееся кольцо автомата перекоса с блоком управления вертолетом, тяги, связывающие вращающееся кольцо с элементами управления углом установки лопастей, отличающийся тем, что продольные оси пар лопастей расположены под острым углом друг к другу, каждая пара лопастей имеет свою пару серволопаток, автомат перекоса имеет возможность перемещения вдоль вала, каждая суммирующая качалка поводка лопасти одним своим плечом связана с вращающимся кольцом автомата перекоса, другим плечом - со стержнем серволопатки, на валу установлена ползушка с возможностью перемещения вдоль вала, снабженная четырьмя дифференциальными качалками, каждая качалка одним своим плечом связана с вращающимся кольцом автомата перекоса, другим плечом - с поводком серволопатки.
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |

