Изобретение относится к авиации, а именно к управлению несущим винтом винтокрылых летательных аппаратов.
Известен способ управления несущим винтом, реализованный на вертолетах ОКБ Братухина И.П.Омега I, Омега II, Б-4, Б-11 и на вертолетах ОКБ Яковлева А.С. ЯК-100 (Изаксон А.Н., "Советское вертолетостроение", Машиностроение, 1981 год, стр. 162, 251), заключающийся в изменении угла установки лопасти при помощи автомата перекоса типа "паук". При управлении циклическим шагом лопасти несущего винта ось автомата перекоса отклоняется от вертикального положения, под действием тяг управления, при этом тяги лопастей перемещаются, изменяя угол установки лопастей, при управлении общим шагом ось перемещается вдоль оси вала несущего винта, через тяги изменяя угол установки лопастей.
Способ реализован в конструкции, использованной на вертолетах ОКБ Братухина И.П.Омега I, Омега II, Б-4, Б-11 и на вертолете ОКБ Яковлева А.С. ЯК-100 (Изаксон А.Н., «Советское вертолетостроение», Машиностроение 1981 год, стр.162, 251).
Конструкция управления состоит из тяг управления и автомата перекоса, который выполнен в виде вала, перемещающегося внутри вала главного редуктора, и имеет ось, качающуюся внутри вала на шаровом шарнире головки, расположенной на верхнем конце оси и связанной тремя рычагами с поводками лопастей несущего винта. Вал автомата перекоса через винтовой необратимый механизм связан системой тяг и качалок с рычагом общего шага.
Недостатками данного способа являются: большие усилия в проводке управления, нагрузки на ось, что уменьшает безопасность полета летательного аппарата; необходимость применения тяг и качалок,связывающих ось с лопастями, это приводит к маленькой жесткости проводки управления, увеличивая возможность возникновения колебаний лопастей, и снижает безопасность полета.
Недостатками данной конструкции управления являются: большие нагрузки на оси и проводки управления, это приводит к маленькой жесткости оси на изгиб и маленькой жесткости проводки управления в целом, большим размерам и массе тяг и качалок системы управления; увеличивает возможность возникновения колебаний лопастей, что снижает безопасность полета, особенности данной конструкции ограничивают область ее применения на летательных аппаратах больших масс, большие усилия, необходимые для управления несущим винтом, приводящие к необходимости установки тяжелой гидросистемы.
Известен способ управления несущим винтом, реализованный на вертолете KAMAN (обзор Цаги, "Проектные и экспериментальные исследования скоростных вертолетов и винтокрылых аппаратов", № 296 за 1969 год), заключающийся в изменении угла установки лопастей с помощью отклонения серво-закрылков, которыми управляет автомат перекоса тарельчатого типа. При циклическом управлении кольцо автомата перекоса отклоняют от положения, перпендикулярного валу несущего винта, и через тяги и качалки отклоняют серво-закрылки, при управлении общим шагом кольцо автомата перекоса перемещают вдоль оси вала несущего винта, через тяги отклоняя серво-закрылки, при этом момент, возникающий при отклонении серво-закрылков, поворачивает лопасти относительно продольной оси на заданный угол установки.
Способ управления несущим винтом реализован в конструкции управления, установленной на вертолете KAMAN (обзор Цаги, "Проектные и экспериментальные исследования скоростных вертолетов и винтокрылых аппаратов", № 296 за 1969 год).
Конструкция управления несущим винтом состоит из серво-закрылков, соединенных через тяги и качалки с автоматом перекоса, который включает: вращающееся кольцо с шарнирно присоединенными к нему тягами и не вращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом.
Недостатками данного способа являются: необходимость в применении большого количества тяг и качалок связывающих подвижное кольцо автомата перекоса с серво закрылками, необходимость в большом количестве шарниров, что приводит к люфтам и к возможность колебаний в проводки управления, ухудшая управляемость несущим винтом, тем самым снижая безопасность полета винтокрылого летательного аппарата.
Недостатками данной конструкции управления являются: большое количество качалок, шарниров и длинных стержней, передающих движение от кольца автомата перекоса к серво-закрылкам, что увеличивает массу системы управления и уменьшает ее жесткость, что снижает управляемость несущего винта и безопасность полета.
Наиболее близким по технической сущности к предлагаемому способу управления несущим винтом является способ управления несущим винтом авторов Балакирева С.В. и Павлова В.А. Патент 2203835 В643С 11/30 по заявке 200121687 от 14.08.2000 года, который заключается в изменении угла установки лопастей при помощи серво-закрылков, отклоняемых автоматом перекоса, при этом управление циклическим шагом осуществляют перемещением кольца автомата перекоса в плоскости, параллельной плоскости втулки несущего винта, эти перемещения передают через обкатывающие ролики, прижатые к кольцу центробежной силой, на суммирующий механизм автомата перекоса, а управление общим шагом осуществляют перемещением ползуна вдоль оси вала несущего винта, затем перемещения циклического и общего управления суммируют на рычаге и через тросы, натянутые центробежной силой, отклоняют серво-закрылки, возникающими аэродинамическими моментами поворачивают лопасти вокруг продольных осей.
Наиболее близким по конструкции к предлагаемому устройству управления несущим винтом является устройство управления несущим винтом авторов Балакирева С.В. и Павлова В.А. Патент 2203835 В643С 11/30 по заявке 200121687 от 14.08.2000 года, состоящее из автомата перекоса, серво-закрылков и связи между ними. Автомат перекоса выполнен из невращающегося кольца, установленного параллельно втулке несущего винта и шарнирно закрепленного на качалках циклического шага, которые установлены на корпусе редуктора, при этом невращающееся кольцо выполнено с возможностью перемещения в плоскости, параллельной плоскости втулки несущего винта, и суммирующего механизма, состоящего из качалки общего шага, шарнирно закрепленной на втулке несущего винта с возможностью опирания на шатун общего шага и закрепленной на ней суммирующей качалке, на которой через подшипник закреплен ролик, выполненный с возможностью обкатывания по невращающемуся кольцу, а связь автомата перекоса с серво-закрылками осуществлена с помощью троса, натянутого центробежной силой.
Недостатками данного способа являются: необходимость в применении тяг и качалок, а также суммирующего механизма, связывающего продольное и поперечное управление, большое количество шарниров приводит к люфтам и возможности колебаний в проводке управления, ухудшая управляемость несущим винтом, тем самым снижая безопасность полета винтокрылого летательного аппарата.
Недостатками данной конструкции управления являются: большое количество деталей автомата перекоса, что усложняет изготовление, а также уменьшает надежность конструкции. Применение обкатывающих роликов вследствие их постоянного износа усложняет эксплуатацию конструкции, уменьшает ее надежность, что снижает безопасность полета.
Решаемой задачей предлагаемого способа и устройства является повышение управления несущим винтом, а следовательно, повышение безопасности полета летательного аппарата. Уменьшение стоимости изготовления автомата перекоса, упрощение конструкции и повышение надежности.
В способе управления несущим винтом винтокрылого летательного аппарата, заключающемся в изменении угла установки лопастей при помощи серво-закрылков, связанных с автоматом перекоса тросами, натянутыми центробежной силой, управление циклическим шагом осуществляют отклонением оси от положения, параллельного оси вала несущего винта, при этом циклически отклоняя через тросы серво-закрылки, а управление общим шагом осуществляют поворотом оси в резьбовом соединении с шарниром при ее движении вдоль оси вала, при этом через тросу отклоняют одновременно закрылки на всех лопастях.
В Устройстве управления несущим винтом винтокрылого летательного аппарата, состоящем из автомата перекоса, связанного с серво-закрылками тросами и качалками, закрепленными на лопастях, автомат перекоса выполнен из резьбового соединения оси с шарниром, причем шарнир закреплен без возможности вращения внутри вала винта, а ось установлена внутри шарнира в резьбовом соединении с углом наклона резьбы, достаточным для поворота оси при заданных осевых усилиях, при этом верхней частью ось соединена с серво-закрылками через тросы и качалки, закрепленные на лопастях несущего винта, а нижней частью ось через подшипники соединена с тягами управления, сферическими шарнирами.
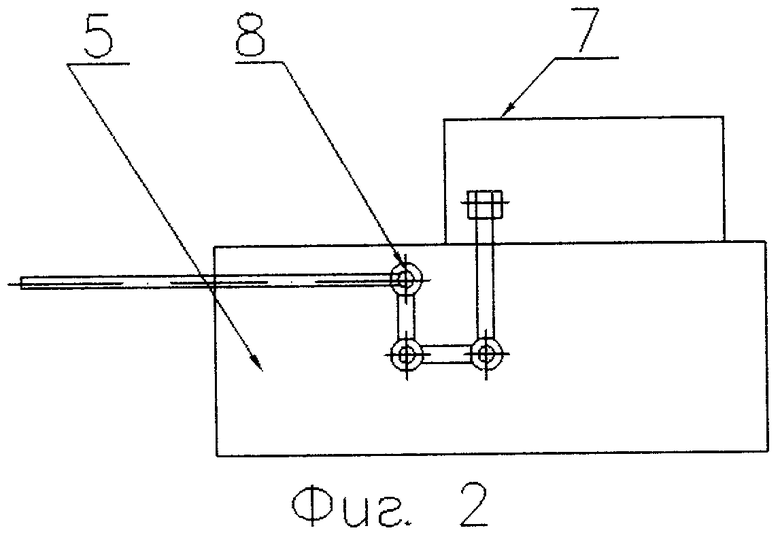
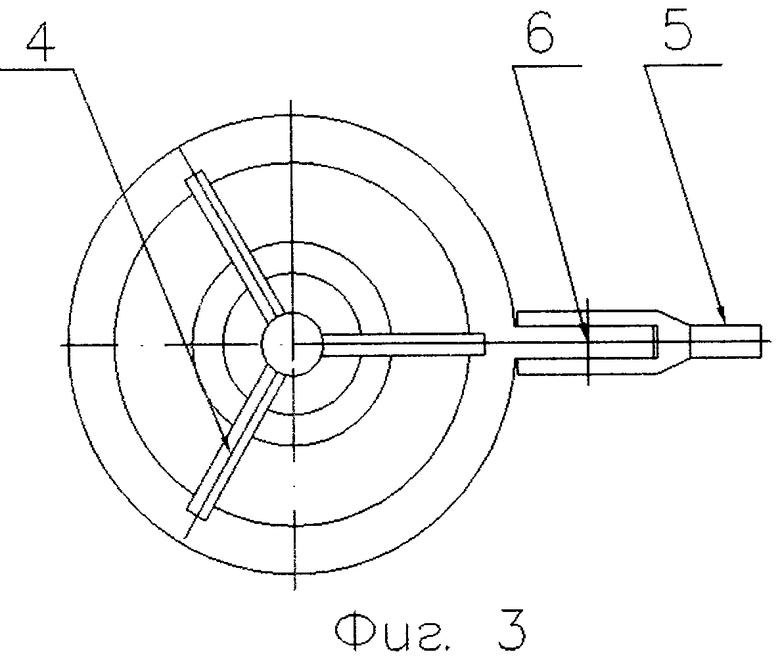
Для пояснения сущности предлагаемого изобретения на фиг.1 показан общий вид, на фиг.2 - лопасть несущего винта с серво-закрылком, на фиг.3 - вид сверху на несущий винт, где:
1 - вал винта;
2 - сферический шарнир;
3 - ось;
4 - тяга;
5 - лопасть несущего винта;
6 - горизонтальный шарнир;
7 - серво-закрылок;
8 - качалка;
9 - трос;
10 - тяга;
11 - качалка;
12 - корпус редуктора;
13 - тяга управления;
14 - сферический шарнир;
15 - стакан подшипника;
16 - шлиц;
17 - шарниры;
18 - подшипник.
Внутри вала несущего винта 1 закреплен сферический шарнир 2, от вращения внутри вала винта шарнир зафиксирован шлицем 16. Внутри шарнира на резьбовом соединении с большим углом наклона резьбы установлена ось 3, которая верхней частью через тягу 4 и управляющие тросы 9, качалки 8 связана с серво- закрылками 7, расположенными на лопастях несущего винта 5. С другой стороны ось 3 через подшипник 18, находящийся внутри стакана 15, соединена сферическим шарниром 14 с тягой общего шага винта 13 и соединена тягой 10 со сферическими шарнирами 14, с качалкой 11, которая на шарнирах 17 закреплена на корпусе аппарата 12 и соединена с тягой циклического шага. Натяжение тросов 9 осуществляют центробежной силой.
Устройство работает следующим образом.
Циклическое управление осуществляют отклонением оси 3 под действием тяг циклического шага 10 от положения, параллельного оси вала несущего винта 1, при этом через тросы 9, натянутые центробежной силой, и качалкой 8, закрепленной на лопастях 5, происходит отклонение серво-закрылков 7.
Управление общим шагом осуществляют поворотом оси 3 в резьбовом соединении с шарниром, при действии на нее осевой силы от тяги общего шага 13 через подшипник 18, при этом через тросы 9 и качалки 8, закрепленные на лопастях, отклоняют серво-закрылки 7, приводя к изменению угла установки лопасти 5. Шлиц - шарнир 16 предотвращает поворот шарнира внутри вала несущего винта.
Преимущество данного способа заключается в том, что нет необходимости в применении дополнительных тяг и качалок, связывающих автомат перекоса с серво-закрылками, это увеличивает жесткость и надежность системы управления, увеличивая безопасность полета винтокрылого летательного аппарата; применение подшипника маленького диаметра дает возможность упростить и облегчить автомат перекоса; управление винтом при помощи серво-закрылков позволяет отказаться от тяжелой гидросистемы.
Преимущество данной конструкции системы управления винтом заключается в том, что в автомате перекоса применен подшипник маленького диаметра, это позволяет значительно облегчить автомат перекоса. Конструкция проста в изготовлении и содержит малое количество деталей, не требует сложной настройки и легка в эксплуатации, данная конструкция может применятся на моделях летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| Система привода закрылков летательного аппарата | 2022 |
|
RU2799167C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВАЛОВА ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ЭЛАСТИЧНОЙ ЛОПАСТИ НЕСУЩЕГО ВИНТА КОМБИНИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2043948C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2004 |
|
RU2263048C2 |
Изобретение относится к авиации. Способ управления несущим винтом винтокрылого летательного аппарата заключается в изменении угла установки лопастей (5) при помощи серво-закрылков, связанных с автоматом перекоса тросами (9), натянутыми центробежной силой. Циклическое управление осуществляют отклонением оси от положения, параллельного оси вала несущего винта, при этом циклически отклоняя через тросы (9) серво-закрылки, а управление общим шагом осуществляют поворотом оси в резьбовом соединении с шарниром при ее движении вдоль оси вала, при этом через тросы отклоняют одновременно закрылки на всех лопастях (5). Устройство управления несущим винтом винтокрылого летательного аппарата состоит из автомата перекоса, связанного с серво-закрылками тросами (9) и качалками, закрепленными на лопастях. Автомат перекоса выполнен из резьбового соединения оси (3) с шарниром (2). Шарнир (2) закреплен без возможности вращения внутри вала (1) винта, а ось установлена внутри шарнира в резьбовом соединении с углом наклона резьбы, достаточным для поворота оси при заданных осевых усилиях. Верхней частью ось соединена с серво-закрылками через тросы (9) и качалки, закрепленные на лопастях несущего винта, а нижней частью ось через подшипники (18) соединена с тягами (13) управления, сферическими шарнирами (14). Изобретения повышают безопасность полета летательного аппарата. 2 н.п. ф-лы, 3 ил.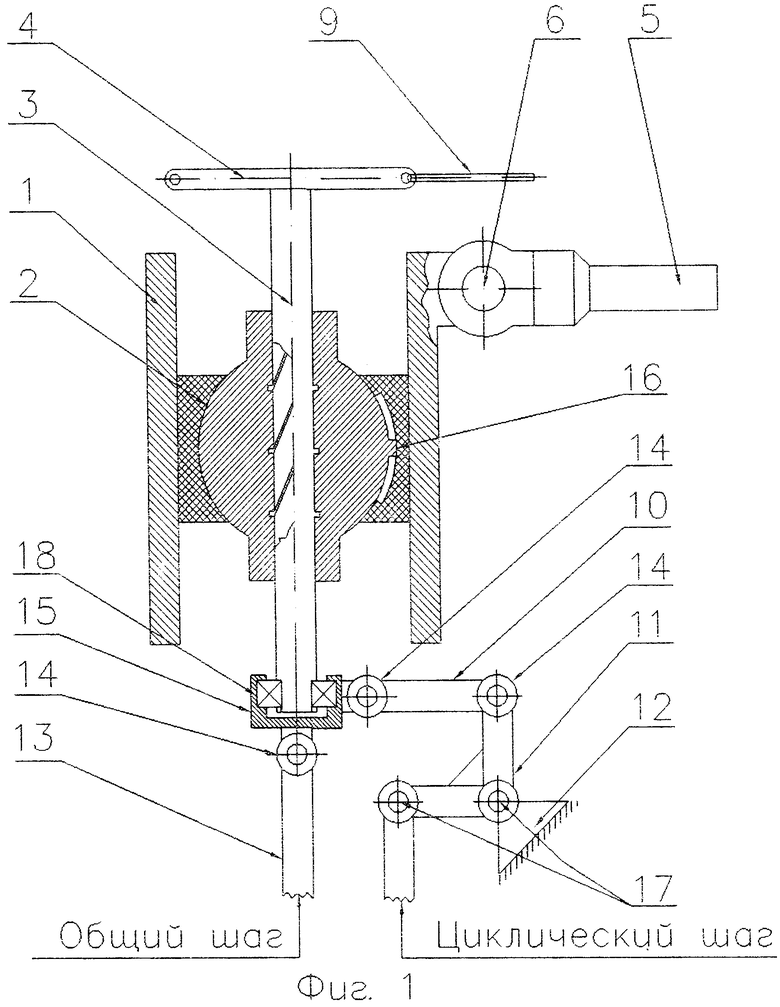
1. Способ управления несущим винтом винтокрылого летательного аппарата, заключающийся в изменении угла установки лопастей при помощи сервозакрылков, связанных с автоматом перекоса тросами, натянутыми центробежной силой, отличающийся тем, что циклическое управление осуществляют отклонением оси от положения, параллельного оси вала несущего винта, при этом циклически отклоняя через тросы сервозакрылки, а управление общим шагом осуществляют поворотом оси в резьбовом соединении с шарниром при ее движении вдоль оси вала, при этом через тросы отклоняют одновременно закрылки на всех лопастях.
2. Устройство управления несущим винтом винтокрылого летательного аппарата, состоящее из автомата перекоса, связанного с сервозакрылками тросами и качалками, закрепленными на лопастях, отличающееся тем, что автомат перекоса выполнен из резьбового соединения оси с шарниром, причем шарнир закреплен без возможности вращения внутри вала винта, а ось установлена внутри шарнира в резьбовом соединении с углом наклона резьбы, достаточным для поворота оси при заданных осевых усилиях, при этом верхней частью ось соединена с сервозакрылками через тросы и качалки, закрепленные на лопастях несущего винта, а нижней частью ось через подшипники соединена с тягами управления, сферическими шарнирами.
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| Устройство для определения фильтрации грунтов | 1978 |
|
SU763585A1 |
| US 6135713 A, 14.10.2002. | |||

