Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам.
Известен грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий, по меньшей мере, два шарнирно соединенных перекрещивающихся рычага, одни концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, с которыми связаны другие концы рычагов, и раздвижной привод в виде силового цилиндра, шток которого снабжен дополнительными тягами и посредством осей соединен с верхним и нижним плечами перекрещивающихся рычагов, смонтированных на платформе и на основании, при этом основание силового цилиндра смонтировано на общей оси перекрещивающихся рычагов шарнирно-рычажного механизма (патент №7267595 А1, МПК B66F 7/08, B66F 7/06, 17.10.1995).
К недостаткам описанного грузоподъемного стола относится сложность конструкции раздвижного привода из-за размещения силового цилиндра на общей оси перекрещивающихся рычагов и невозможность фиксации грузовой платформы над основанием в крайнем верхнем положении, а также невысокая грузоподъемность.
Наиболее близким аналогом к заявленному объекту относится грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий, по меньшей мере, два шарнирно соединенных перекрещивающихся рычага, закрепленных соответственно на платформе и на основании, с которыми связаны другие концы рычагов, и раздвижной привод в виде силового цилиндра, шток гидроцилиндра снабжен тягами, которые посредством осей раздвигают верхнее и нижнее плечи перекрещивающихся рычагов, смонтированных на платформе и на основании, причем основание силового гидроцилиндра осью и парой дополнительных тяг соединено с осями на верхнем и нижнем плечах перекрещивающихся рычагов (DE патент №3502641 А1, МПК B66F 3/22, 3/07, 1986 Грузоподъемный стол).
К недостаткам описанного грузоподъемного стола относится низкая грузоподъемность. Это вызвано тем, что силовой гидроцилиндр в качестве раздвижного привода на концы перекрещивающихся рычагов воздействует косвенно: через Т-образные кронштейны, оси и тяги, при этом положение силового гидроцилиндра меняется в широком диапазоне. Для увеличения грузоподъемности требуются либо силовые гидроцилиндры большого диаметра, либо их параллельное размещение.
Параллельное размещение силовых гидроцилиндров во всех случаях приводит к перекосам и заклиниваниям на осях.
Сущность заявленного изобретения в следующем.
Задача, на решение которой направлено заявленное изобретение, - повышение грузоподъемности.
Технический результат - повышение скорости подъема грузовой платформы.
Указанный технический результат по первому варианту конструктивного исполнения достигается тем, что раздвижной привод снабжен дополнительным силовым гидроцилиндром и балкой, один конец которой смонтирован на общей оси перекрещивающихся рычагов, а другой конец балки дополнительной осью шарнирно соединен с основаниями силовых гидроцилиндров, штоки которых связаны с концами перекрещивающихся рычагов, смонтированных в направляющих платформы и основания.
Указанный технический результат по второму варианту конструктивного исполнения достигается тем, что раздвижной привод снабжен дополнительным силовым гидроцилиндром и двуплечим рычагом, смонтированным с возможностью углового качания на общей оси перекрещивающихся рычагов, на концах двуплечего рычага посредством осей размещены основания силовых гидроцилиндров, штоки которых осями шарнирно соединены с верхними концами перекрещивающихся рычагов, один конец из них смонтирован в направляющей грузовой платформы, а другой конец - в ее шарнире.
Изобретение поясняется чертежами.
На фиг.1 схематично представлен грузоподъемный стол по первому варианту конструктивного исполнения.
На фиг.2 схематично представлен грузоподъемный стол по второму варианту конструктивного исполнения.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Грузоподъемный стол содержит основание 1, грузовую платформу 2, расположенный между ними шарнирно-рычажный механизм 3 и раздвижной привод 4. Шарнирно-рычажный механизм 3 включает, по меньшей мере, два шарнирно соединенных общей осью 5 перекрещивающихся рычага 6 и 7. Концы 8 и 9 рычагов 6 и 7 смонтированы в направляющих 10 и 11, закрепленных соответственно на платформе 2 и на основании 1. Другие концы 12 и 13 рычагов 6 и 7 связаны шарнирами 14 и 15 с платформой 2 и основанием 1. Раздвижной привод 4 представлен в виде силового гидроцилиндра 16, шток 17 которого посредством оси 18 раздвигает верхнее и нижнее плечи перекрещивающихся рычагов 6 и 7, смонтированных на платформе 2 и основании 1.
По первому варианту конструктивного исполнения раздвижной привод 4 снабжен дополнительным силовым гидроцилиндром 19 и балкой 20. Один конец балки 20 смонтирован на общей оси 5 перекрещивающихся рычагов 6 и 7. Другой конец упомянутой балки 20 дополнительной осью 21 шарнирно соединен с основаниями силовых гидроцилиндров 16 и 19. Шток 17 силового гидроцилиндра 16 осью 18 связан с верхним концом 8 двуплечего рычага 7. Шток 22 силового гидроцилиндра 19 связан осью 23 нижним концом 9 двуплечего рычага 6. Концы 8 и 9 5 перекрещивающихся рычагов 6 и 7 посредством опор качения 24 и 25 на осях 18 и 23 смонтированы в направляющих 10 и 11 грузовой платформы 2 и основания 1 (см. фиг.1).
По второму варианту конструктивного исполнения раздвижной привод 4 снабжен дополнительным силовым гидроцилиндром 19 и двуплечим рычагом 26 (см. фиг.2). Двуплечий рычаг 26 смонтирован с возможностью углового качения на общей оси 5 перекрещивающихся рычагов 6 и 7 рычажного механизма 3. На концах двуплечего рычага 26 посредством осей 21 и 27 размещены основания силовых гидроцилиндров 16 и 19. Шток 17 силового гидроцилиндра 16 осью 28 соединен с верхним концом 8 двуплечего рычага 7. Шток 22 силового гидроцилиндра 19 осью 29 соединен с верхним концом 12 двуплечего рычага 6 рычажного механизма 3. Верхний конец 12 рычага 6 смонтирован в шарнире 14 грузовой платформы 2, а верхний конец 8 рычага 7 посредством оси 18 и опоры качения 24 смонтирован в направляющей 10 грузовой платформы 2.
Нижние концы 13 и 9 рычагов 6 и 7 рычажного механизма 3 снабжены дополнительными осями 30 и 31 для установки дополнительной пары гидроцилиндров 16 и 19 на осях 21 и 27 двуплечего рычага 26. Это позволяет без изменения конструкции грузоподъемного стола многократно увеличить его грузоподъемность.
Грузоподъемный стол по первому варианту конструктивного исполнения функционирует следующим образом.
Полости оснований силовых гидроцилиндров 16 и 19 раздвижного привода 4 параллельно гидравлически соединены с напорной магистралью гидросистемы грузоподъемного стола. При подаче рабочей жидкости в бесштоковые полости силовых гидроцилиндров 16 и 19 их штоки 17 и 19 выдвигаются из полостей оснований. Эти линейные перемещения штоков 17 и 19 приводят к тому, что расстояние между дополнительной осью 21 и осями 18 и 23 на концах 8 и 9 рычагов 7 и 6 рычажного механизма 3 увеличивается. За счет балки 20 дополнительная ось 21 находится на постоянном удалении от общей осей 5 перекрещивающихся рычагов 6 и 7 механизма 3. При раздвигании концов 8 и 9 рычагов 7 и 6 опорные ролики 24 и 25 на осях 18 и 23 перекатываются в направляющих 10 и 11. Одновременно с этим двуплечие рычаги 7 и 6 поворачиваются на общей оси 5. В этом случае ось 23 на нижнем конце 9 рычага 6 перемещается в направлении оси 13 в шарнире 15 основания 1. Синхронно этому перемещению ось 18 на верхнем конце 8 рычага 7 в направляющей 10 перемещается в сторону оси 12 шарнира 12 грузовой платформы 2.
Даже при самой высокой точности изготовления невозможно подобрать два одинаковых силовых гидроцилиндра. И второе условие, которым продиктовано последовательное размещение силовых гидроцилиндров 16 и 19 в силовой цепи: начинает перемещение тот шток 17 (19) силового гидроцилиндра 16 (19), который наименее нагружен. При последовательном размещении силовых гидроцилиндров 16 и 19 их перемещения между основанием 1 и грузовой платформой 2 синхронизируется балкой 20, шарнирно установленной на общей оси 5 и дополнительной оси 21, а развиваемые усилия приложены к осям 18 и 23 на концах 8 и 9 рычагов 7 и 6. Этим исключаются чрезмерные изгибающие нагрузки на балки 3 и 7. За счет последовательного размещения силовых гидроцилиндров 16 и 19 раздвижного привода двукратно увеличивается грузоподъемность стола и столько же раз скорость подъема грузовой платформы 2 над основанием 1.
Выбранные положения силовых гидроцилиндров 16 и 19 раздвижного привода за счет балки 20 и осей 5 и 21 обеспечивают грузоподъемному столу минимальные габаритные размеры в сложенном положении.
Грузоподъемный стол по второму варианту конструктивного исполнения работает следующим образом.
Силовые гидроцилиндры 16 и 19 раздвижного привода 4 гидравлически параллельно соединены в гидросистему грузоподъемного стола. При подаче рабочей жидкости в штоковые полости силовых гидроцилиндров 16 и 19 их штоки 17 и 22 втягиваются в полости гидроцилиндров 16 и 19. В этом случае расстояние между осями 28 и 21 на одном конце двуплечего рычага 26 и на верхнем конце 8 рычага 7 уменьшается, так же как расстояние между осями 29 и 27 на конце рычага 26 и верхнем конце 12 рычага 6. Перемещения штоков 17 и 22 в полости силовых гидроцилиндров 16 и 19 приводят к тому, что двуплечие рычаги 7 и 6 начинают поворачиваться на общей оси 5. Поворот рычагов 6 и 7 на общей оси 5 приводит к тому, что расстояние между осью 14 на верхнем конце 12 рычага 6 и осью 18 на верхнем конце 8 рычага 7 увеличивается. Ось на конце 12 рычага 6 поворачивается в шарнире 14 грузовой платформы 2. Опора качения 24 на оси 18 за счет описанных перемещений начинает катиться в направляющей 10 грузовой платформы 2.
За счет общей оси 5 нижние концы 13 и 9 рычагов 7 и 6 выполняют угловые и линейные перемещения в шарнире 15 и направляющей 11 основания 11. Эти синхронные перемещения приводят к опусканию грузовой платформы 2 в сторону основания 1.
За счет кинематической связи двуплечего рычага 26, общей оси 5, силовых гидроцилиндров 16 и 19 и верхних концов 8 и 12 двуплечих рычагов 6 и 7 достигаются равномерное опускание грузовой платформы 2 над основанием 1, снижение времени приведения в исходное положение платформы 2 над основанием 1.
За счет размещения нескольких пар силовых гидроцилиндров 16 (19) на осях 21 и 27 достигается многократное повышение грузоподьемной платформы 2, упрощение конструкции и повышение надежности стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381987C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385285C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381986C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
Изобретение относится к подъемно-транспортному оборудованию. Грузоподъемный стол содержит основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм и раздвижной привод. Одни концы перекрещивающихся рычагов упомянутого механизма смонтированы в направляющих, закрепленных соответственно на платформе на основании, а другие концы перекрещивающихся рычагов закреплены шарнирами на грузовой платформе и на основании. Раздвижной привод механизма содержит основной и дополнительный силовые гидроцилиндры. Согласно первому варианту раздвижной привод снабжен балкой. Один конец балки смонтирован на общей оси перекрещивающихся рычагов. Другой конец балки дополнительной осью шарнирно соединен с основаниями силовых гидроцилиндров. Штоки указанных силовых гидроцилиндров связаны с концами перекрещивающихся рычагов, смонтированных в направляющих платформы и основания. Согласно второму варианту раздвижной привод снабжен двуплечим рычагом. Двуплечий рычаг смонтирован с возможностью углового качания на общей оси перекрещивающихся рычагов. На концах двуплечего рычага посредством осей размещены основания силовых гидроцилиндров. Их штоки посредством осей шарнирно соединены с верхними концами перекрещивающихся рычагов. Изобретение обеспечивает повышение грузоподъемности. 2 н.п. ф-лы, 2 ил.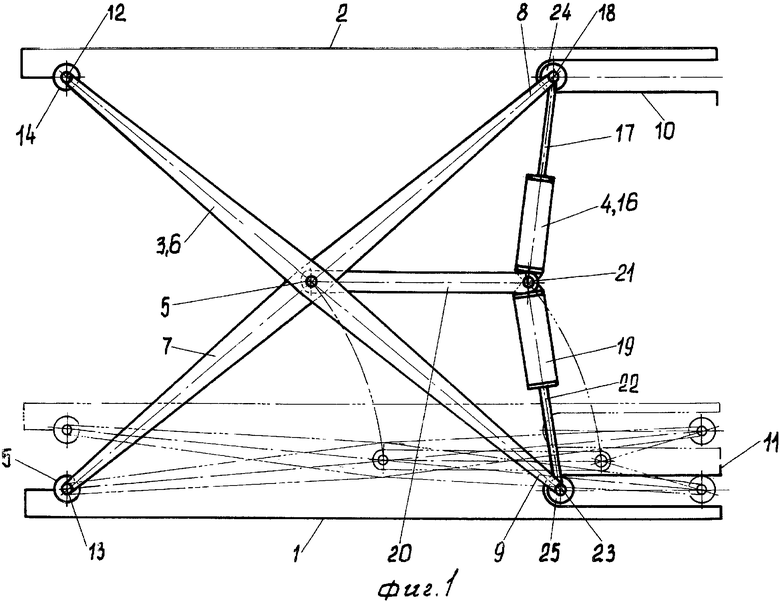
1. Грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий, по меньшей мере, два шарнирно соединенных общей осью перекрещивающихся рычага, одни концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, с которыми связаны другие концы рычагов, и раздвижной привод в виде силового гидроцилиндра, шток которого посредством оси раздвигает верхнее и нижнее плечи перекрещивающихся рычагов, смонтированных на платформе и основании, отличающийся тем, что раздвижной привод снабжен дополнительным силовым гидроцилиндром и балкой, один конец которой смонтирован на общей оси перекрещивающихся рычагов, а другой конец балки дополнительной осью шарнирно соединен с основаниями силовых гидроцилиндров, штоки которых связаны с концами перекрещивающихся рычагов, смонтированных в направляющих платформы и основания.
2. Грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий, по меньшей мере, два шарнирно соединенных общей осью перекрещивающихся рычага, одни концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, с которыми связаны другие концы рычагов, и раздвижной привод в виде силового гидроцилиндра, шток которого посредством оси раздвигает верхнее и нижнее плечи перекрещивающихся рычагов, смонтированных на платформе и основании, отличающийся тем, что раздвижной привод снабжен дополнительным силовым гидроцилиндром и двуплечим рычагом, смонтированной с возможностью углового качания на общей оси перекрещивающихся рычагов, на концах двуплечего рычага посредством осей размещены основания силовых гидроцилиндров, штоки которых осями шарнирно соединены с верхними концами перекрещивающихся рычагов, один конец из них смонтирован в направляющей грузовой платформы, а другой конец - в ее шарнире.
| DE 3502641 A1, 31.07.1986 | |||
| JP 7267595 A1, 17.10.1995 | |||
| Подъемник | 1978 |
|
SU751792A1 |

