Изобретение относится к кино-видеоаппаратуре и предназначено для панорамной кино-видеосъемки в процессе движения (перемещения) съемочной камеры.
Известны установки для проведения панорамной кино- или видеосъемки, включающие опору (в частности, гидравлическую) с размещенной на ней съемочной камерой, при этом опора выполнена с возможностью горизонтального (азимутального) и вертикального (по углу места) поворота камеры в процессе съемки (RU №2300128, №2115615). Установки выполнены с возможностью закрепления их на каком-либо носителе, в том числе транспортном средстве, как рельсовом, так и безрельсовом. При размещении установки на рельсовом транспортном средстве требуется тщательная установка и стыковка рельсовых панорам с использованием различных вспомогательных средств. При размещении установки на безрельсовых тележках (транспортных средствах) съемку возможно производить преимущественно при движении по ровным поверхностям. При движении носителя, на котором закреплена установка, по поверхности, обусловливающей ее значительные колебания, возникают значительные динамические нагрузки на носитель, камеру и механизмы ее поворота, вследствие чего не обеспечивается плавность перемещения съемочной камеры, что необходимо для достижения высокого качества отснятого с помощью камеры материала.
Для стабилизации камеры в процессе ее перемещения используются механические пружинно-рычажные системы типа «Стэдикам». Однако степень стабилизации и, соответственно, качество отснятого материала напрямую зависит от физической подготовки оператора, на которого ложится основная нагрузка по управлению камерой и ее удерживанию. В устройстве по патенту US6293676, наиболее близком по технической сущности к заявляемому, опора, на которой установлена съемочная камера, выполнена телескопической и дополнительно стабилизирована по вертикали противовесом для частичного гашения колебаний, которые могут возникнуть при перемещении устройства посредством какого-либо транспортного средства.
Технический результат, достижение которого призвано обеспечить настоящее изобретение, заключается в организации перемещения установленной на опоре аппаратуры для панорамной кино- или видеосъемки с демпфированием возможных динамических воздействий на аппаратуру и со стабилизацией ее положения при угловых и линейных перемещениях в процессе панорамной съемки.
Технический результат достигается тем, что в установке, включающей вертикальную опору, площадку с размещенной на ней кино- или видеокамерой (съемочной аппаратурой), блоки питания и электронного управления, упомянутая опора выполнена пневматической виброизолирующей, содержит цилиндрическую эластичную гофрированную оболочку, заполненную сжатой газо-воздушной смесью, и связана механически и посредством управляемого клапана с дополнительной емкостью для упомянутой смеси. На корпусе емкости размещены по меньшей мере четыре двигателя коррекции, каждый из которых связан (ленточной тягой) с упомянутой площадкой с возможностью обеспечения изменения ее положения относительно вертикальной опоры. Установка снабжена двумя колесами, содержащими обод и ходовой протектор, по внутренней стороне обода каждого колеса установлены два катка с размещенным внутри каждого ходовым двигателем и каток с двигателем управления наклоном опоры, связанный коленчатым валом с жестким кольцом, охватывающим пневматическую опору, причем корпуса упомянутых двигателей связаны между собой жестко. На площадке установлены датчики ее положения относительно вертикальной опоры. Блок электронного управления содержит приемник сигналов управления, связанные с ним блок управления движением установки, блок управления съемочной аппаратурой и блок управления опорой, причем блок управления движением связан с ходовыми двигателями, блок управления опорой связан с датчиками положения площадки, двигателями коррекции и управляемым клапаном.
Изобретение поясняется описанием и приложенными к нему чертежами. На фиг.1 приведен общий вид установки (без электронной схемы управления), на фиг.2 - то же, вид сбоку, на фиг.3 - то же, вид сверху, на фиг.4 - общий вид установки со схемой управления.
Установка содержит пневматическую вертикальную опору 1 в виде наполненной сжатой газо-воздушной смесью цилиндрической гофрированной оболочки, состоящей из двух частей меньшего и большего диаметров. Опора закреплена на корпусе дополнительной емкости 2, также заполненной сжатой газо-воздушной смесью и связана с ней посредством электрически управляемого клапана 3. На вертикальной опоре 1 перпендикулярно последней установлена площадка 4 для закрепления кино- или видеосъемочной аппаратуры (далее камеры) 5. На корпусе емкости 2 установлены четыре двигателя коррекции 6, соединенных ленточными тягами 7, шарнирно связанными с площадкой 4. Установка снабжена двумя колесами, каждое из которых включает жесткий обод 8 и ходовой протектор 9. Внутри обода 8 установлены два ходовых катка 10 с размещенными в них двигателями 11, а также третий каток 12 с двигателем наклона опоры 13.
Двигатели 11 и 13 жестко связаны между собой элементом 14, который, в свою очередь, осью 15 связан с емкостью 2, при этом ось 15 выполняет роль оси наклона опоры. Все упомянутые выше двигатели: 6, 11 и 13 представляют собой бесколлекторные двигатели постоянного тока с моментным управлением. Каждый из двигателей наклона опоры коленчатым валом 16 связан с жестким кольцом 17, охватывающим пневматическую опору в месте сопряжения ее частей разных диаметров. Емкость 2 снабжена вторым управляемым клапаном 18. На площадке 4 установлены датчики 19 ее положения относительно вертикальной оси опоры. Электронное устройство управления установкой включает в себя блок управления опорой 20 и связанный с ним ходовой процессор 21. Блок управления опорой 20 связан с двигателями коррекции 6, электрически управляемыми клапанами 3 и 18, а также датчиками 19. Устройство содержит также блок управления камерой 22, закрепленной в панорамной головке (ПНР) 23 на площадке 4. Управление установкой может производиться как с пульта 24, так и дистанционно, для чего в устройстве управления предусмотрен приемник дистанционных сигналов управления 25, связанный с блоком ввода информации 26.
Установка работает следующим образом.
По команде, сформированной в блоке ввода информации с пульта управления или поступившей по радиоканалу, запускается процессор 21, формируя сетку сигналов управления, поступающих в соответствующие блоки. По сигналам на движение опоры запускаются двигатели катков 11, приводя в движение колеса, при этом одновременно с движением ободов колес приводятся в движение двигатели наклона опоры 13. Крутящие моменты последних через коленчатые валы 16, связанные с жестким кольцом 17, изменяют положение опоры 1, компенсируя при этом момент инерции покоя. При наклоне опоры стабилизацию положения площадки 4 осуществляют двигатели коррекции 6, управляемые от блока управления опорой по сигналам, сформированным от датчиков 19 положения площадки. Изменение положения площадки производится наматыванием на валы двигателей коррекции ленточных тяг 7, конструктивно связанных с площадкой. При необходимости изменить высоту опоры производится (по команде оператора) подкачка рабочего тела сжатой воздушно-газовой смеси в полость опоры через буферную емкость посредством управляемых клапанов 3 и 18 и синхронное включение двигателей 6, управляющих как стабилизацией, так и высотой опоры.
Изобретение может быть использовано в кино- или видеопроизводстве и позволяет производить качественную панорамную съемку объектов в процессе движения съемочной аппаратуры, в том числе по неровной поверхности. Оно позволяет облегчить труд оператора и увеличить творческую составляющую съемочного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ | 1995 |
|
RU2097814C1 |
| ДАЛЬНОМЕР (ВАРИАНТЫ) | 1995 |
|
RU2082213C1 |
| Устройство для крепления киносъемочного аппарата на корпусе оператора | 1988 |
|
SU1525665A1 |
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| Универсальное мобильное устройство для выполнения аэрофотосъемки с применением различных пилотируемых воздушных средств | 2021 |
|
RU2795778C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Устройство для крепления ручной кинокамеры на корпусе оператора | 1977 |
|
SU691797A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НА ОРБИТЕ МЕСТА ТЕЧИ В КОРПУСЕ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2023 |
|
RU2813814C1 |
Подвижная стабилизированная установка для панорамной киновидеосъемки включает вертикальную опору, перпендикулярно которой установлена площадка с размещенной на ней съемочной аппаратурой и электронное устройство управления. Вертикальная опора выполнена пневматической в виде наполненной сжатой газо-воздушной смесью цилиндрической гофрированной оболочки, состоящей из двух частей меньшего и большего диаметров. Указанная опора закреплена на корпусе емкости для упомянутой смеси и связана с ней посредством электрически управляемого клапана. На корпусе емкости размещены, по меньшей мере, четыре двигателя коррекции, каждый из которых связан кинематически с упомянутой площадкой с возможностью изменения положения последней относительно вертикальной опоры. Установка снабжена двумя колесами, каждое из которых содержит обод и ходовой протектор, при этом на внутренней стороне обода установлены два катка с размещенными в них ходовыми двигателями, и третий каток, сопряженный с двигателем наклона опоры. При этом указанные двигатели жестко связаны между собой элементом, который, в свою очередь, осью, выполняющей роль оси наклона опоры, связан с емкостью, а двигатель наклона опоры соединен коленчатым валом с жестким кольцом, охватывающим опору в месте сопряжения ее частей разных диаметров. Электронное устройство управления содержит процессор и связанные с ним блок управления движением, блок управления положением опоры, при этом блок управления движением электрически связан с ходовыми двигателями, а блок управления положением опоры связан электрически с двигателями коррекции. На площадке установлены, по меньшей мере, два датчика положения, связанные с блоком управления положением опоры, а упомянутая емкость снабжена, по меньшей мере, двумя управляемыми клапанами, один из которых соединен с полостью опоры, а другой выполнен с возможностью подсоединения внешних устройств. Технический результат - организация перемещения установленной на опоре аппаратуры для панорамной кино- или видеосъемки с демпфированием возможных динамических воздействий на аппаратуру и стабилизация ее положения при угловых и линейных перемещениях в процессе панорамной съемки. 3 з.п. ф-лы, 4 ил.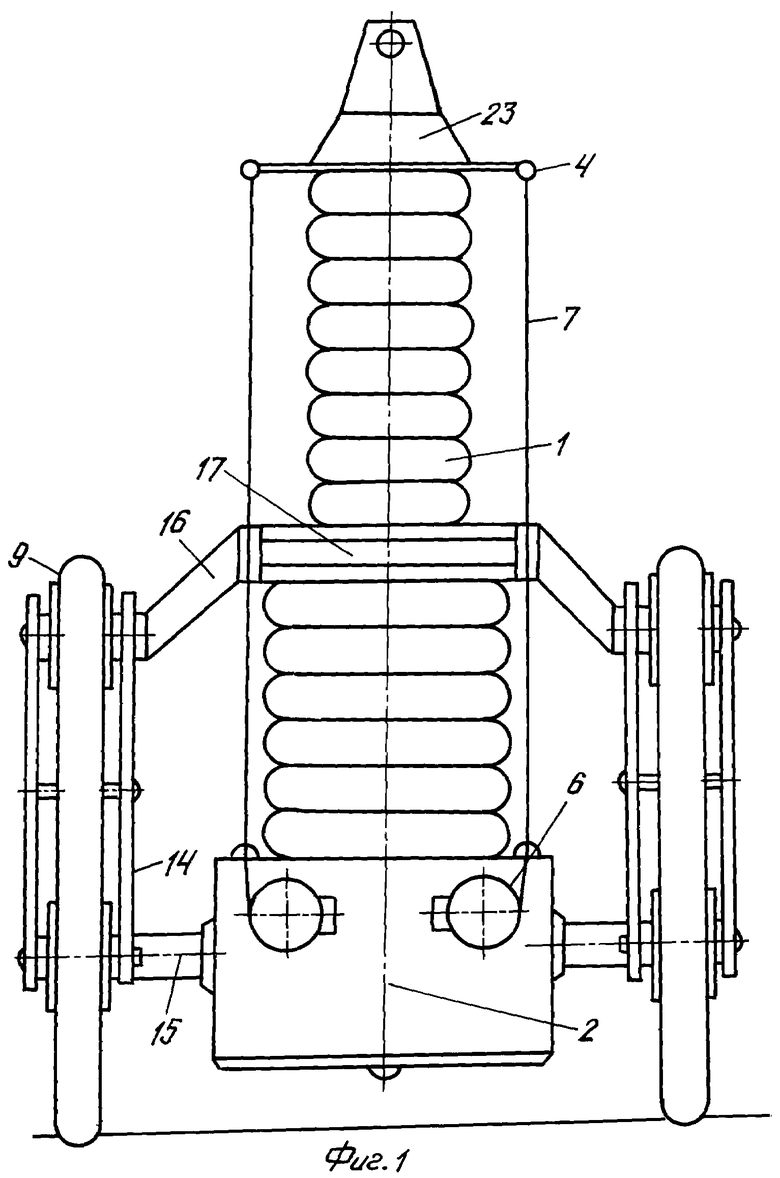
1. Подвижная стабилизированная установка для панорамной киновидеосъемки, включающая вертикальную опору, перпендикулярно которой установлена площадка с размещенной на ней съемочной аппаратурой и электронное устройство управления, отличающаяся тем, что вертикальная опора выполнена пневматической в виде наполненной сжатой газовоздушной смесью цилиндрической гофрированной оболочки, состоящей из двух частей меньшего и большего диаметров, указанная опора закреплена на корпусе емкости для упомянутой смеси и связана с ней посредством электрически управляемого клапана, причем на корпусе емкости размещены, по меньшей мере, четыре двигателя коррекции, каждый из которых связан кинематически с упомянутой площадкой с возможностью изменения положения последней относительно вертикальной опоры, а установка снабжена двумя колесами, каждое из которых содержит обод и ходовой протектор, при этом на внутренней стороне обода установлены два катка с размещенными в них ходовыми двигателями, и третий каток, сопряженный с двигателем наклона опоры, при этом указанные двигатели жестко связаны между собой элементом, который, в свою очередь, осью, выполняющей роль оси наклона опоры, связан с емкостью, а двигатель наклона опоры соединен коленчатым валом с жестким кольцом, охватывающим опору в месте сопряжения ее частей разных диаметров, а электронное устройство управления содержит процессор и связанные с ним блок управления движением, блок управления положением опоры, при этом блок управления движением электрически связан с ходовыми двигателями, а блок управления положением опоры связан электрически с двигателями коррекции, а на площадке установлены, по меньшей мере, два датчика положения, связанные с блоком управления положением опоры, а упомянутая емкость снабжена, по меньшей мере, двумя управляемыми клапанами, один из которых соединен с полостью опоры, а другой выполнен с возможностью подсоединения внешних устройств.
2. Установка по п.1, отличающаяся тем, что каждый из двигателей выполнен как электрический двигатель постоянного тока с моментным управлением.
3. Установка по п.1, отличающаяся тем, что каждый из двигателей коррекции связан с площадкой посредством ленточной тяги.
4. Установка по п.3, отличающаяся тем, что каждая из ленточных тяг связана с площадкой посредством шарнира.
| US 5752112 A, 12.05.1998 | |||
| US 6439515 В1, 27.08.2002 | |||
| US 6293676 B1, 25.09.2001 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛОВОГО ПОКРЫТИЯ С ТЕРМОПЛАСТИЧНЫМ МАТЕРИАЛОМ | 2006 |
|
RU2387538C2 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2005 |
|
RU2300128C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |

