Предлагаемое изобретение относится к области ветеринарной хирургии, а именно к контролю сближения краев раны, и может быть использовано при выборе метода наложения шва, а также подбора лигатурного материала при пластических операциях, сшивании грыжевого кольца и зияющей раны, содержащей в толще стенки апоневроз в виде пластины из соединительной ткани.
Известен способ контроля сближения краев раны (Аппаратная дермотензия при закрытии ран мягких тканей. [Электронный ресурс]: / С.Г.Измайлов, В.В.Бесчастнов, М.Г.Рябков, А.Ю.Жаринов, Е.С.Одинцов. // Инфекции в хирургии мирного и военного времени: всеармейская международная конференция, Москва: 14-16 ноября 2006 г. - Режим доступа: http://www.sia-r.ru/data/userfiles/TEZ-ARMY.pdf). При сближении спиц, проведенных внутри кожно, степень напряжения ткани контролируют по снижению температуры поверхности кожи. Достижение предельной величины растяжения ткани определяют по снижению ее температуры более чем на 0,5°С.
Недостатком данного способа является невозможность учета при закрытии раны механического взаимодействия ткани и лигатуры, определяющего риск прорези ткани соответственно силе натяжения лигатуры. Контроль температуры деформируемой ткани не обеспечивает достаточной точности подбора толщины шовного материала для сближения краев раны. Кроме того, при наложении единичного стежка, например, узлового шва, область деформации апоневроза при сближении краев дефекта мала по площади и трудно определима среди окружающих тканей при размещении термодатчика, что также снижает точность контроля на основе оценки температурных изменений.
Известен способ определения силы сдавливания краев раны гнойного лактационного мастита при ее зашивании (патент RU, №2106117, МПК А61В 17/04, опубликовано 1998.03.10), согласно которому силу натяжения нитей накладываемых швов определяют с помощью динамометра.
Сближение краев апоневротического дефекта без возможности измерения толщины ткани приводит к недостаточной точности данного способа. При этом отсутствие контроля взаимодействия ткани и лигатуры не позволяет точно установить предельную силу натяжения лигатуры, исключающую прорезь ткани.
Наиболее близким к заявленному изобретению является способ определения механических свойств кожного покрова (А.с. СССР, 1586679, МПК А61В 5/103, Бюлл. №31, 1990 г), основанный на приложении к поверхности биологической ткани механического усилия, направленного параллельно поверхности ткани, с одновременной регистрацией расстояния между зонами растяжения (прототип).
Недостатком способа по прототипу является то, что невозможно точно определить момент достижения максимально допустимой силы натяжения лигатуры, исключающей прорезь ткани. Механическое усилие прикладывают к поверхности ткани, но не к самой лигатуре, в результате чего деформация ткани осуществляется вне связи с процессом натяжения лигатуры. Остается невозможным учет механического взаимодействия самой лигатуры с тканью, что снижает точность контроля.
Технической задачей является повышение точности контроля лигатурного сближения краев апоневротического дефекта в результате учета механического взаимодействия апоневроза и лигатуры в процессе ее натяжения.
Техническая задача достигается тем, что способ контроля лигатурного сближения краев апоневротического дефекта, включающий приложение к ткани механического воздействия посредством растягивающего усилия, регистрацию показателей деформации ткани согласно техническому решению в области места вкола иглы обозначают две зоны контроля, производят растягивающее усилие ткани путем натяжения концов лигатуры во время сближения краев апоневротического дефекта и в каждой из зон контроля синхронно регистрируют показатели деформации ткани с одновременным учетом в динамике величины разности между показателями деформации ткани, при достижении максимума величины разности прекращают лигатурное сближение краев апоневротического дефекта.
Заявленный способ отличается тем, что в области места вкола иглы обозначают две зоны контроля, производят растягивающее усилие ткани путем натяжения концов лигатуры во время сближения краев апоневротического дефекта и в каждой из зон контроля синхронно регистрируют показатели деформации ткани с одновременным учетом в динамике величины разности между показателями деформации ткани, при достижении максимума величины разности прекращают лигатурное сближение краев апоневротического дефекта.
На фиг.1 показан фрагмент дефекта апоневротической ткани (апоневротический дефект) с отпрепарированными с двух сторон от краев дефекта участками апоневротической ткани, на которых проводят контроль лигатурного сближения краев апоневротического дефекта.
На фиг.2 показана динамика разности между величинами деформации апоневроза первой зоны контроля АБ и второй зоны контроля БВ при нарастающем с шагом 20 г усилии натяжения лигатуры динамометром 0,5 мм.
На фиг.3 показана динамика разности между величинами деформации апоневроза первой зоны контроля АБ и второй зоны контроля БВ при нарастающем с шагом 200 г усилии натяжения лигатуры диаметром 1,5 мм. На фиг.1 обозначены:
- апоневротический дефект 1;
- края 2 апоневротического дефекта 1;
- участок 3 (отпрепарированный у края апоневротического дефекта участок апоневротической ткани, на котором осуществляют вкол иглы с лигатурой и контроль лигатурного сближения посредством датчика);
- участок 4 (отпрепарированный у края апоневротического дефекта участок апоневротической ткани, на котором осуществляют выкол иглы с лигатурой);
- лигатура 5;
- место вкола 6 иглы на участке 3;
- место выкола 7 иглы на участке 4;
- условная визуальная линия 8;
- промежуток 9 лигатуры 5, прошитой через апоневротический дефект 1, между местом вкола 6 иглы и местом выкола 7 иглы;
- периферическая граница 10 участка 3;
- первая шкала 11 датчика;
- петля 12;
- вторая шкала 13 датчика;
- трубка 14;
- основа 15 датчика;
- скобы 16;
- трубка 17 основы 15;
- динамометр 18.
Способ осуществляют следующим образом. Учитывая особенность расположения апоневротической ткани под слоем других видов тканей, выделяют препарированием участок 3 (фиг.1) и участок 4 апоневротической ткани на протяжении 10 - 30 мм от краев 2 апоневротического дефекта 1. На участке 3 намечают красящим антисептиком, например, раствором йода, место (точку) вкола 6 иглы, оно должно быть расположено на расстоянии 5-10 мм от края 2 апоневротического дефекта 1. Намечают так же место выкола 7 иглы на участке 4. От места вкола 6 иглы к периферической границе 10 участка 3 проводят условную визуальную линию 8, при этом условная визуальная линия 8 должна являться противоположным визуальным продолжением промежутка 9 лигатуры 5. В области места вкола 6 иглы на условной визуальной линии 8 обозначают две зоны контроля - первую зону контроля АБ и вторую зону контроля БВ. При этом на условной визуальной линии 8 помечают точку А (при помощи красящего антисептика) между местом вкола 6 иглы и краем 2 апоневротического дефекта 1. Точка А должна располагаться на расстоянии 0,1-1,0 мм от места вкола 6 иглы. Затем, действуя противоположно от места вкола 6 иглы в сторону периферической границы 10 участка 3, на расстоянии 0,5-3,0 мм от места вкола 6 иглы на условной визуальной линии 8 помечают точку Б. Точку В помечают на условной визуальной линии 8 на расстоянии 5,0-15,0 мм от точки Б по направлению к периферической границе 10. В обеих зонах контроля АБ и БВ устанавливают регистрирующее устройство (датчик), предназначенное для измерения показателей деформации апоневротической ткани, которые используются для способа контроля лигатурного сближения краев апоневротического дефекта. Датчик устанавливают следующим образом. Первую шкалу 11 датчика размещают на условной визуальной линии 8 в точке А при помощи петли 12. Затем в точке Б параллельно первой шкале 11 датчика размещают вторую шкалу 13 датчика при помощи трубки 14. Основу 15 датчика совмещают с первой шкалой 11 датчика и второй шкалой 13 датчика при помощи двух скоб 16. Трубку 17 основы 15 закрепляют в точке В. Трубку 14 и трубку 17 закрепляют, например, вакуумными присосками. После установки регистрирующего устройства (датчика) через петлю 12 пропускают конец лигатуры 5 и при помощи иглы прошивают конец лигатуры 5 через участок 3 в намеченном месте вкола 6 иглы, проводят промежуток 9 лигатуры 5 через апоневротический дефект 1 и выводят лигатуру 5 в намеченном месте выкола 7 иглы на участке 4. На одном из концов лигатуры 5 устанавливают динамометр 18. Затем производят растягивающее усилие ткани следующим образом. С контролируемым усилием, которое измеряют динамометром 18, сближают края 2 апоневротического дефекта 1 путем подтягивания концов лигатуры 5 навстречу друг другу. Во время подтягивания концов лигатуры 5 апоневротическая ткань, на которой обозначены две зоны контроля АБ и БВ, растягивается, и шкалы датчика, установленные в каждой из этих зон, синхронно отражают в динамике показатели деформации апоневротической ткани. При этом исследователь осуществляет контроль лигатурного сближения краев 2 апоневротического дефекта 1 следующим образом: он определяет в динамике величину разности между величинами показателей деформации апоневротической ткани, синхронно измеряемых в обеих зонах контроля АБ и БВ. Величина разности в процессе процедуры сближения (в динамике) краев 2 апоневротического дефекта 1 нарастает, затем достигает максимума, после чего снижается (фиг.2, 3). Снижение величины разности деформации апоневротической ткани отражает начало прорези сближаемых краев ткани. Дальнейшее сближение краев 2 апоневротического дефекта 1 прекращают.
Пример 1. В эксперименте на препарате вентральной брюшной стенки крупного рогатого скота выделяют препарированием участки апоневротической ткани на расстоянии 20 мм от краев апоневротического дефекта наружной косой брюшной мышцы. На освобожденном участке апоневротической ткани намечают раствором йода места для вкола и выкола иглы на расстоянии 10 мм от края апоневротического дефекта. От места вкола иглы к периферической границе участка проводят условную визуальную линию в качестве противоположного визуального продолжения промежутка лигатуры, расположенного в зоне апоневротического дефекта. В области места вкола иглы на условной визуальной линии обозначают точку А между местом вкола иглы и краем апоневротического дефекта на расстоянии 0,1 мм от места вкола иглы. Действуя противоположно от места вкола иглы в сторону периферической границы участка выделенной апоневротической ткани, на расстоянии 1,7 мм от места вкола иглы на условной визуальной линии помечают точку Б. Точку В помечают на условной визуальной линии на расстоянии 6,0 мм от точки Б по направлению к периферической границе. В обеих зонах контроля АБ и БВ устанавливают датчик. Через петлю пропускают лигатуру и при помощи иглы прошивают конец лигатуры через участок апоневротической ткани в намеченном месте вкола иглы, проводят лигатуру через апоневротический дефект и выводят лигатуру в намеченном месте выкола иглы. С контролируемым усилием, которое измеряют динамометром, сближают края апоневротического дефекта путем подтягивания концов лигатуры навстречу друг другу. Фиксируют показания первой шкалы датчика и второй шкалы датчика в процессе нарастающего с шагом 20 г усилия натяжения лигатуры при сближении краев апоневротического дефекта.
В связи с нарастанием усилия натяжения лигатуры до 210 г (фиг.2) разность показаний первой и второй шкал датчика достигла наибольшей величины, указывая на достижение предельного усилия натяжения лигатуры. Дальнейшее нарастание усилия натяжения лигатуры сопровождалось прорезью ткани.
Пример 2. В эксперименте на препарате вентральной брюшной стенки крупного рогатого скота выделяют препарированием участки апоневротической ткани на расстоянии 25 мм от краев апоневротического дефекта наружной косой брюшной мышцы. На освобожденном участке апоневротической ткани намечают раствором йода места для вкола и выкола иглы на расстоянии 10 мм от края апоневротического дефекта. По условной визуальной линии в области места вкола иглы обозначают точку А на расстоянии 0,1 мм от места вкола иглы. На расстоянии 1,5 мм от места вкола иглы на условной визуальной линии помечают точку Б. Точку В помечают на условной визуальной линии на расстоянии 9,0 мм от точки Б. В обеих зонах контроля АБ и БВ устанавливают датчик. Через петлю пропускают лигатуру и при помощи иглы прошивают конец лигатуры через участок апоневротической ткани в намеченном месте вкола иглы, проводят лигатуру через апоневротический дефект и выводят лигатуру в намеченном месте выкола иглы. С контролируемым усилием, которое измеряют динамометром, сближают края апоневротического дефекта путем подтягивания концов лигатуры навстречу друг другу. Фиксируют показания первой шкалы датчика и второй шкалы датчика в процессе нарастающего с шагом 200 г усилия натяжения лигатуры при сближении краев апоневротического дефекта.
В связи с нарастанием усилия натяжения лигатуры до 400 г разность показаний первой и второй шкал датчика (Фиг.3) достигла наибольшей величины, указывая на достижение предельно допустимой величины натяжения лигатуры, предупреждающей прорезь ткани.
Таким образом, предлагаемый способ контроля лигатурного сближения краев апоневротического дефекта позволяет точно определить момент достижения максимально допустимой силы натяжения лигатуры, исключающей прорезь ткани.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки натяжения в апоневротическом слое лапаротомной раны и устройство для его осуществления | 2017 |
|
RU2644716C1 |
| СПОСОБ УШИВАНИЯ ЛАПАРОТОМНОЙ РАНЫ | 2002 |
|
RU2223048C1 |
| Способ нитевого лифтинга промежности при недостаточности мышц тазового дна и зиянии половой щели | 2024 |
|
RU2840433C1 |
| СПОСОБ МАЛОИНВАЗИВНОГО ЛЕЧЕНИЯ ПАЦИЕНТОВ С ГЕМОРРОЕМ 3 И 4 СТАДИИ | 2014 |
|
RU2553937C1 |
| СПОСОБ УШИВАНИЯ ЛАПАРОТОМНОЙ РАНЫ С СОЗДАНИЕМ ДУБЛИКАТУРЫ | 2003 |
|
RU2263472C2 |
| СПОСОБ НАЛОЖЕНИЯ КОЖНОГО ШВА | 2011 |
|
RU2454955C1 |
| Малоинвазивный способ лечения при пупочной грыже небольших размеров под УЗИ-навигацией | 2023 |
|
RU2840695C1 |
| СПОСОБ УШИВАНИЯ ЛАПАРОТОМНОЙ РАНЫ | 2004 |
|
RU2261665C1 |
| СПОСОБ УШИВАНИЯ ЛАПАРОТОМНЫХ РАН | 2000 |
|
RU2198606C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ПОВРЕЖДЕНИЙ МЕНИСКОВ КОЛЕННОГО СУСТАВА И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2233627C1 |
Изобретение относится к хирургии и может быть применимо для контроля лигатурного сближения краев апоневротического дефекта. Помечают точку А между местом вкола иглы и краем апоневротического дефекта, на расстоянии 0,1-1,0 мм от места вкола иглы. Помечают точку Б на расстоянии 0,5-3,0 мм от места вкола иглы в сторону периферии. Помечают точку В на расстоянии 5,0-15,0 мм от точки Б по направлению к периферии. Устанавливают в обеих зонах контроля АБ и БВ датчик, предназначенный для измерения показателей деформации апоневротической ткани. Производят растягивающее усилие ткани путем натяжения концов лигатуры во время сближения краев апоневротического дефекта и в каждой из зон контроля синхронно регистрируют показатели деформации ткани с одновременным учетом в динамике величины разности между показателями деформации ткани. Способ позволяет увеличить точность контроля за сближением краев раны. 3 ил.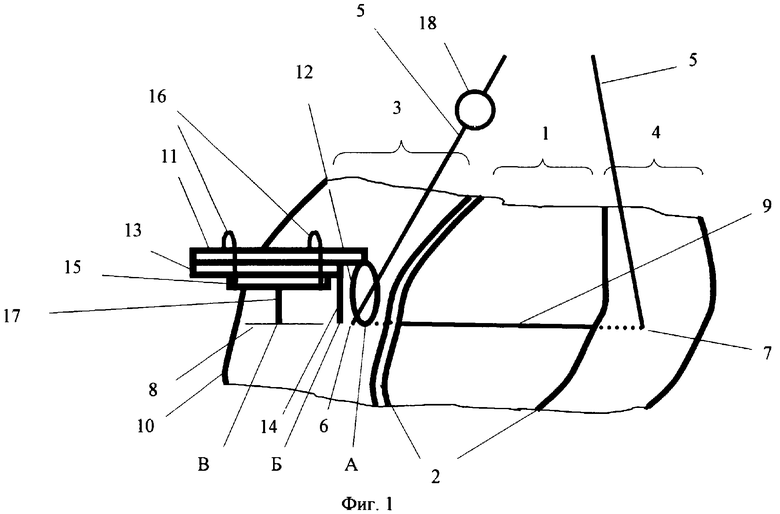
Способ контроля лигатурного сближения краев апоневротического дефекта, включающий приложение к ткани механического воздействия посредством растягивающего усилия, регистрацию показателей деформации ткани, отличающийся тем, что в области места вкола иглы обозначают две зоны контроля следующим образом: помечают точку А между местом вкола иглы и краем апоневротического дефекта на расстоянии 0,1-1,0 мм от места вкола иглы, помечают точку Б на расстоянии 0,5-3,0 мм от места вкола иглы в сторону периферии, помечают точку В на расстоянии 5,0-15,0 мм от точки Б по направлению к периферии, в обеих зонах контроля АБ и БВ устанавливают датчик, предназначенный для измерения показателей деформации апоневротической ткани, производят растягивающее усилие ткани путем натяжения концов лигатуры во время сближения краев апоневротического дефекта и в каждой из зон контроля синхронно регистрируют показатели деформации ткани с одновременным учетом в динамике величины разности между показателями деформации ткани, при достижении максимума величины разности прекращают лигатурное сближение краев апоневротического дефекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ СДАВЛИВАНИЯ КРАЕВ РАНЫ ГНОЙНОГО ЛАКТАЦИОННОГО МАСТИТА ПРИ ЕЕ ЗАШИВАНИИ | 1994 |
|
RU2106117C1 |
| DE 4444130 A1, 14.06.1995 | |||
| ИЗМАЙЛОВ С.Г | |||
| и др | |||
| Аппаратная дермотензия при закрытии ран мягких тканей | |||
| VI Всеармейская международная конференция «Инфекции в хирургии мирного и военного времени» | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| HÖER J | |||
| et al | |||
| Quantitative evaluation of abdominal wall perfusion | |||

