ОБЛАСТЬ ТЕХНИКИ
Описан двигатель внутреннего сгорания, демонстрирующий один или более из признаков, включающих: обратную перестановку (изменение взаимного расположения на противоположное), асимметричные такты и создание непрерывно действующего крутящего момента.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Двигатель внутреннего сгорания представляет собой тепловой двигатель, в котором источником тепловой энергии является химическая реакция в рабочей текучей среде. Рабочей текучей средой в двигателе внутреннего сгорания является топливо, такое как бензин, дизельное топливо и тому подобное, как известно специалистам-практикам в данной области техники, и воздух. Тепло выделяется за счет химической реакции топлива и отводится выходящими побочными продуктами сгорания израсходованного топлива в окружающую среду. Напротив, в двигателе внешнего сгорания, таком как паровой двигатель, тепло передается рабочей текучей среде через сплошную стенку и отводится в окружающую среду через другую сплошную стенку.
Двигатели внутреннего сгорания имеют два присущих им преимущества над двигателями других типов, такими как паровые двигатели. Во-первых, они не требуют никаких теплообменников за исключением теплообменника для дополнительного охлаждения, что приводит к уменьшению веса, объема, стоимости и сложности двигателя. Во-вторых, двигатели внутреннего сгорания не требуют высокотемпературной теплопередачи через стенки. Таким образом, максимальная температура рабочей текучей среды может превышать максимальную допустимую температуру материала стенок. Тем не менее, двигатели внутреннего сгорания также имеют присущие им недостатки. На практике рабочие текучие среды могут быть ограничены горючим источником, воздухом и продуктами сгорания, и имеет место незначительная приспосабливаемость к условиям сгорания. Не относящиеся к топливам источники тепла, такие как отходящая теплота, солнечная энергия и ядерная энергия, не могут быть использованы. Кроме того, двигатели внутреннего сгорания современной конструкции могут быть очень неэффективными.
Тем не менее, преимущества существенно перевешивают недостатки использования двигателя внутреннего сгорания. Четырехтактный двигатель внутреннего сгорания на основе цикла Отто в настоящее время широко используется в обществе. Количество используемых двигателей внутреннего сгорания превышает количество всех остальных типов тепловых двигателей вместе взятых. Одна проблема, связанная с двигателем внутреннего сгорания, состоит в низкой эффективности двигателя. Современные технические решения, имеющиеся в наличии для проектирования двигателей внутреннего сгорания, приводят к эффективности, составляющей приблизительно 25% при преобразовании энергии рабочей текучей среды в полезную мощность. Таким образом, низкая эффективность двигателя приводит к увеличению потребности в топливе, одновременно способствуя высоким уровням выброса загрязняющих веществ в атмосферу.
Двигатели предназначены для превращения топлива в полезную мощность. В двигателе внутреннего сгорания топливо сжигается для создания усилия в виде высокого давления, которое может быть преобразовано некоторыми механическими средствами в крутящий момент или вращательное движение для перемещения заданного объекта, такого как ведущий вал автомобиля, полотно дисковой пилы, нож газонокосилки и т.п. Крутящий момент вокруг оси вращения в любой заданный момент времени, как описано законом Архимеда, равен произведению перпендикулярного вектора силы на расстояние от оси вращения, на котором приложена сила. Мощность в лошадиных силах связана с крутящим моментом на выходном валу двигателя формулой:

Крутящий момент ограничен в современных конструкциях двигателей величиной силы, которая может быть приложена к коленчатому валу в любой заданный момент времени, и геометрией механического преобразования, которая "регулирует" угол и расстояние от коленчатого вала, на котором приложена сила. При использовании современных технических решений для двигателей внутреннего сгорания имеет место возможность изменения геометрии механического преобразования силы в крутящий момент в незначительных пределах. Для увеличения крутящего момента требуется увеличение величины создаваемой силы, что приводит к созданию двигателя с большим рабочим объемом и к увеличению потребности в топливе.
Главный вопрос в современной технологии создания двигателей внутреннего сгорания - это соотношение между эффективной выходной мощностью в лошадиных силах (л.с.) и рабочим объемом двигателя в кубических дюймах, или полным рабочим объемом двигателя. Желательное соотношение между мощностью в лошадиных силах и рабочим объемом двигателя в кубических дюймах составляет приблизительно 1:1. Это означает, что эффективная выходная мощность, равная 1 л.с., создается на каждый кубический дюйм рабочего объема двигателя. Тем не менее, большинство двигателей внутреннего сгорания, имеющихся в настоящее время, не имеют данного соотношения 1:1, достигая только приблизительно 0,85 л.с. на кубический дюйм рабочего объема двигателя. При использовании в конструкции различных известных увеличивающих (инкрементных) усовершенствований, например при добавлении турбонагнетателя, уровни эффективной выходной мощности в лошадиных силах могут быть повышены за пределы приблизительно 1 л. с. на кубический дюйм полного рабочего объема двигателя. Тем не менее, современные усовершенствования для повышения эффективности являются лишь инкрементными с точки зрения выгод и достигаются ценой большой сложности и затрат.
Большинство двигателей внутреннего сгорания представляют собой поршневые двигатели. В поршневом двигателе внутреннего сгорания топливо может быть сожжено для создания давления, которое может быть использовано для создания силы для перемещения поршня. Как показано на фиг.1а-1d, в поршневом двигателе топливо может быть направлено в камеру и сжато поршнем. Искра может быть использована для зажигания топлива, что вызывает сгорание топлива и увеличение давления и температуры внутри камеры, что вызывает увеличение рабочего объема, в котором может находиться топливо. Продукты сгорания, или выхлоп, могут быть выпущены в окружающую среду. Эта последовательность четырех тактов, известных как (1) впуск, (2) сжатие, (3) расширение (рабочий такт) и (4) выпуск, известна вместе как цикл Отто. Почти все двигатели внутреннего сгорания в настоящее время могут быть созданы с использованием цикла Отто. Последовательность в цикле Отто осуществляется в приведенном порядке. Такты сжатия и расширения представляют собой составляющие пару такты. Большая часть затраченной работы осуществляется во время такта сжатия, в то время как большая часть выходной мощности может быть создана во время такта расширения. Эти два такта представляют собой обратные процессы по отношению друг к другу, и их, как правило, графически показывают вместе с аналогичными координатами на графике зависимости давления от объема, который показывает полезную рабочую отдачу системы. Такты выпуска и впуска также представляют собой составляющие пару такты и представляют собой обратные по отношению друг к другу процессы в традиционных двигателях. Во время такта выпуска рабочий объем может быть уменьшен для вытеснения выхлопа, и во время такта впуска рабочий объем может быть увеличен для всасывания топлива. Такты выпуска и впуска не показаны графически на графике зависимости давления от объема, поскольку работа, выполняемая во время каждого такта, может рассматриваться как пренебрежимо малая. Приведенный в качестве примера график зависимости давления от объема показан на фиг.2 и иллюстрирует такт сжатия между A и B, зажигание топлива и увеличение давления в рабочем объеме между B и C, такт расширения и увеличение рабочего объема между C и D и такты выпуска и впуска между D и A.
Сжатие и расширение представляют собой процессы, обратные по отношению друг к другу, и выпуск и впуск также представляют собой процессы, обратные по отношению друг к другу, вследствие того, что ход, в соответствии с которым рабочий объем сжимается во время сжатия или выпуска, представляет собой в точности обратный процесс по отношению к тому ходу, в соответствии с которым он соответственно увеличивается во время расширения или впуска. Общее изменение рабочего объема во время каждого перемещения поршня может быть одинаковым, но в противоположном направлении по отношению к изменению рабочего объема при предыдущем перемещении поршня, и направление перемещения поршня может быть таким же, но в противоположном направлении по отношению к предыдущему перемещению. Механические преобразования давления на поршень в крутящий момент и крутящего момента обратно в давление на поршень представляют собой обратные механические процессы.
Как показано на фиг.1a-1d, каждый отдельный ход поршневого двигателя соответствует линейному перемещению поршня 20 внутри камеры 10. По мере того как поршень 20 перемещается вдоль стенки камеры в направлении 26, как показано на фиг.1а, вызывая увеличение рабочего объема 170, топливо может быть подано в камеру 10 из впускного отверстия 60 с образованием такта впуска (фиг.1b). В конце такта впуска и как показано на фиг.1c, направление перемещения поршня 20 вдоль стенки камеры изменяется на обратное, при этом поршень перемещается в направлении 27 и сжимает топливо и присутствующий воздух, как показано на фиг.1a, с образованием такта сжатия. Незадолго до начала такта расширения (рабочего такта) (фиг.1a) сжатая воздушно-топливная смесь может быть зажжена искрой из отверстия 80 для зажигания, что вызывает резкое увеличение температуры и давления воздушно-топливной смеси с воспламенением и сгоранием топлива для образования газов. Уловленные газы вызывают увеличение давления в рабочем объеме, что вызывает увеличение рабочего объема 170 в камере (фиг.1b). Энергия сгорания, не выходящего за границы, создает силу, которая может быть использована для создания крутящего момента. Продукты сгорания могут быть выпущены во внешнюю среду через выхлопное отверстие 70 во время такта выпуска (фиг.1d). Поршень перемещается на длине камеры четыре раза для того, чтобы "пройти" через всю последовательность цикла Отто, как проиллюстрировано выше. Поршень может последовательно перемещаться в цикле Отто. Тем не менее, поскольку работу "получают" только во время такта расширения, можно использовать и соединить друг с другом более одного поршня, так что, по меньшей мере, один поршень может создавать крутящий момент в любой заданный момент времени, при этом остальные поршни будут принудительно выполнять остальные такты. Четные кратные количества поршней, такие как 2, 4, 6, 8 или более, могут быть использованы совместно, при этом один или несколько поршней будут находиться на стадии цикла Отто, отличной от тех стадий, на которых находятся остальные поршни в любой заданный момент времени. Движение многочисленных поршней в противоположных направлениях обеспечивает перемещение при уравновешенности, так что двигатель не будет вибрировать неконтролируемым образом, и может обеспечить более легкий запуск двигателя.
В поршневом двигателе, показанном на фиг.1a-d, движение поршня 20 в камере 10 может быть преобразовано в крутящий момент за счет соединения поршня 20 с коленчатым валом 50 посредством шатуна 30 и кривошипного рычага 40, соединенного с шатуном 30 посредством оси 42 кривошипного рычага. Движения 26, 27 поршня 20 могут быть согласованы с коленчатым валом 50. Коленчатый вал поворачивается в направлении 28 вращения, приводимый в движение силой, создаваемой при линейном перемещении поршня. Крутящий момент равен силе, умноженной на расстояние от оси поворота, на котором приложена сила, при этом расстояние перпендикулярно силе, и в данном случае ось вращения представляет собой коленчатый вал 50. В начале такта расширения поршень 20 и кривошипный рычаг 40 могут располагаться на одной прямой по отношению к коленчатому валу 50, и все давление на поршень 20 может действовать непосредственно на верхнюю часть коленчатого вала 50, как показано на фиг.1a. Расстояние в перпендикулярном направлении от оси вращения, на котором приложена сила, в данный момент равно нулю, и создаваемый крутящий момент равен нулю. До тех пор пока коленчатый вал 50 не повернется в некоторой степени, кривошипный рычаг 40 не обеспечит некоторого расстояния в перпендикулярном направлении от коленчатого вала 50 и не начнет создавать крутящий момент. Это соотношение изменяется приблизительно, как синус угла A, который кривошипный рычаг 40 образует с линией перемещения поршня. Давление на поршне 20 может быть наибольшим незадолго до начала такта расширения, когда топливо первоначально воспламеняется и находится под максимальным давлением и занимает минимальный объем. Эта очень большая часть энергии теряется, поскольку механика двигателя не создает возможности приложения усилия со стороны поршня в направлении, которое обеспечит создание крутящего момента, то есть под углом к коленчатому валу. В действительности усилие со стороны поршня только частично преобразуется в крутящий момент, в то время как остальная часть усилия рассеивается как потерянное тепло. Большая часть потерь энергии в поршневых двигателях внутреннего сгорания с современными техническими решениями имеет место из-за механических ограничений преобразования усилия со стороны поршня в крутящий момент на валу. Эта проблема также имеет место в роторных двигателях внутреннего сгорания с современными техническими решениями, таких как роторный двигатель Ванкеля, подобный показанному на фиг.3a-c.
В своем самом основном виде и как показано, например, на фиг.3a-c, роторный двигатель имеет одну симметричную камеру 10. Вместо поршня имеется многосторонний ротор 22, который сталкивается со стенкой камеры по мере того, как он вращается внутри камеры 10 вокруг коленчатого вала 50. Ротор может вращаться по часовой стрелке, например, как показано на фиг.3a-c. Когда ротор 22 вращается, он создает изменения рабочих объемов 170a, 170b и 170c, необходимые для выполнения каждого из четырех тактов цикла Отто. Для роторного двигателя Ванкеля камера 10 может быть приблизительно овальной с коленчатым валом 50 в центре. Ротор 22 для роторного двигателя Ванкеля имеет приблизительно треугольную форму, приводящую к образованию трех поверхностей 5a-c ротора, имеющих выпуклую форму, и трех отдельных рабочих объемов 170a-c. Круглое отверстие 55 для коленчатого вала 50 может быть образовано в центре ротора 22. Ротор 22 совершает симметричное движение вокруг коленчатого вала 50. Форма стенки камеры может быть спроектирована такой, что все три вершины 21а-с ротора 22 смогут находиться в постоянном контакте со стенкой камеры при вращении ротора 22 вокруг коленчатого вала 50 для завершения каждого из четырех тактов, как продемонстрировано на фиг.3a-c. Внутренняя сторона ротора 22 взаимодействует с коленчатым валом 50 и приводит его во вращение посредством зубчатого колеса (непоказанного), расположенного с внутренней стороны круглого отверстия 55. Как и в поршневом двигателе, впускное отверстие 60, выпускное отверстие 70 и отверстие 80 для зажигания могут иметься для подачи топлива в рабочий объем 170a-c, вытеснения топлива из рабочего объема 170a-c и зажигания топлива в рабочем объеме 170a-c, что обеспечивает возможность осуществления цикла Отто.
В роторном двигателе существует возможность изменения формы стенки камеры или ротора лишь в незначительной степени. Крутящий момент может быть создан за счет взаимодействия поверхности ротора и стенки камеры. Как и в поршневом двигателе, существует проблема создания нулевого крутящего момента во время некоторой части такта расширения. В том случае когда поверхность ротора и стенка камеры поджимаются непосредственно друг к другу при отсутствии какого-либо угла наклона между ними, что может иметь место как в начале, так и в конце такта расширения, не создается никакого крутящего момента. Поверхность ротора должна "сталкиваться" со стенкой камеры под некоторым углом наклона для плавного перемещения вдоль стенки камеры, которое приводит к проворачиванию вала и созданию некоторой составляющей крутящего момента. В роторном двигателе направление, в котором ротор и стенка камеры сталкиваются друг с другом, выровнено относительно вала в начале такта расширения и в конце такта расширения. Таким образом, так же как и в поршневом двигателе, крутящий момент, создаваемый роторным двигателем, равен нулю как в начале, так и в конце такта расширения, что приводит к потере значительной части созданного усилия. Следует отметить, что в роторном двигателе крутящий момент изменяется в зависимости от угла наклона между направлением силы, созданной поверхностью ротора, и направлением силы со стороны наружной стенки камеры и равен силе, действующей со стороны поверхности ротора, умноженной на синус угла наклона и умноженной на косинус угла наклона. Угол наклона изменяется от приблизительно 0 градусов до приблизительно 20 градусов. Это может привести к меньшему механическому преобразованию силы в крутящий момент по сравнению с тем, которое имеет место в поршневом двигателе, в котором крутящий момент изменяется в зависимости от синуса угла, который находится в диапазоне от 0 до 180 градусов.
Традиционные двигатели внутреннего сгорания обеспечивают преобразование некоторой части давления на поршне или роторе в крутящий момент относительно коленчатого вала. При рассмотрении геометрической связи между поршнем и коленчатым валом может быть записано математическое выражение для расчета крутящего момента для поршневого двигателя. На фиг.4 показана геометрическая связь между давлением на поршень F(p), шатуном L, кривошипным рычагом C и коленчатым валом CS, из которой может быть получено математическое выражение. Как показано на фиг.4, при вращении кривошипного рычага C вокруг коленчатого вала может быть образован угол A. В начале такта расширения угол A равен нулю градусов. Угол A увеличивается до 180 градусов по мере продолжения такта расширения. Крутящий момент относительно коленчатого вала в любой момент времени в течение такта расширения может быть рассчитан путем суммирования горизонтальной и вертикальной составляющих крутящего момента, F(x) и F(y), созданных за счет перемещения шатуна L и кривошипного рычага C, путем использования известных тригонометрических и алгебраических подстановок, приведенных ниже:



Подстановка выражения для определения X в формулу (3) дает:


Полагая F(х)=F(p):

Подстановка вышеприведенного выражения в формулу (1) дает:

Как показано в уравнении (2), суммарный крутящий момент в двигателе может быть равным сумме произведения силы F(х) на измеренное в перпендикулярном направлении расстояние от вала, на котором она действует и которое равно C·sin(A), и произведения силы F (y) на измеренное в перпендикулярном направлении расстояние от вала, на котором она действует и которое равно C·cos(A). Подстановка зависимостей между F(x), F(y) и F(p) дает уравнение (8) для крутящего момента. Поскольку в каждой составляющей выражения для определения крутящего момента имеется sin(А), крутящий момент будет изменяться так же, как sin(А). Крутящий момент равен нулю, когда угол А составляет нуль градусов или 180 градусов. Функция механического преобразования силы (давления) в крутящий момент для поршневого двигателя с рабочим объемом 1 литр графически показана на фиг.5 в виде линии Р.
В поршневом двигателе давление на поршень является наибольшим незадолго до начала такта расширения, когда давление внутри камеры является наибольшим. В начале такта расширения угол А составляет нуль градусов, и составляющие крутящего момента равны нулю. Вся сила, действующая со стороны поршня в момент, близкий к началу такта расширения, рассеивается в виде тепла и трения, поскольку она не преобразуется в крутящий момент, что вызывает потерю энергии. Крутящий момент не начинает создаваться в традиционном поршневом двигателе до тех пор, пока кривошипный рычаг не повернется в некоторой степени за нуль градусов.
Традиционные роторные двигатели создают крутящий момент иначе, чем поршневые двигатели. Роторные двигатели создают крутящий момент за счет того, что две поверхности взаимодействуют или сталкиваются под углом друг относительно друга. Крутящий момент зависит от угла наклона между направлением сил, создаваемых поверхностью ротора и вогнутой поверхностью неподвижной стенки камеры. Когда силы, действующие со стороны двух поверхностей, "сталкиваются" точно в противоположных направлениях, не может быть создано никакой составляющей крутящего момента, поскольку сила F(r), действующая со стороны ротора, и сила F(s), действующая со стороны стенки, действуют на одной линии с коленчатым валом CS, не создавая никакого угла наклона, как показано на фиг.6. Для того чтобы была создана составляющая крутящего момента, силы должны сталкиваться друг с другом под некоторым углом наклона, превышающим 0 градусов и составляющим менее 90 градусов. Пересечение создаваемых сил под каким-либо углом, отличным от 0 градусов или 90 градусов, приведет к перемещению взаимодействующих поверхностей в сторону друг относительно друга вокруг коленчатого вала CS и к созданию составляющей F(t) крутящего момента, как показано на фиг.7. Как показано на фиг.7, крутящий момент может быть равным силе F(r), действующей со стороны ротора, умноженной на расстояние D от коленчатого вала CS до стенки S камеры и умноженной на cos(С)·sin(С), где С представляет собой угол наклона, образованный между стенкой камеры и направлением составляющей силы, создающей крутящий момент F(t), и F(s) представляет собой силу, действующую со стороны стенки камеры.





Величина sin(С)·cos(С) имеет максимальное значение при 45 градусах. При 45 градусах значение sin(С)·cos(С) равно 1/2.
Традиционный роторный двигатель имеет проблему при механическом преобразовании силы в крутящий момент, аналогичную проблеме, существующей для традиционного поршневого двигателя. В роторном двигателе направление силы, действующей со стороны поверхности ротора, и направление силы, действующей со стороны наружной стенки камеры, могут совпадать в начале и конце такта расширения. В начале и конце такта расширения не может быть создано никакого крутящего момента, поскольку силы, действующие со стороны поверхности ротора и со стороны наружной стенки камеры, совпадают друг с другом, и каждая из них "выровнена" относительно коленчатого вала, так что при этом не создается никакого угла наклона. Только в средней части такта расширения ротор и наружная стенка камеры будут сталкиваться друг с другом под углом, который превышает 0 градусов и составляет менее 90 градусов, для создания составляющей крутящего момента.
Дополнительная проблема при достижении большего преобразования силы в крутящий момент при современном уровне техники может быть связана с длиной плеча кривошипа (кривошипного рычага). Крутящий момент равен силе, умноженной на расстояние от оси вращения или коленчатого вала, которое измерено в перпендикулярном направлении и на котором приложена сила. Если бы кривошипный рычаг был бы выполнен с большей длиной, был бы создан больший крутящий момент по сравнению с тем, который создается при более коротком кривошипном рычаге, поскольку будет существовать большее расстояние между коленчатым валом и точкой приложения силы. Функционально длина кривошипного рычага ограничена механикой двигателя, например степенью сжатия топлива в двигателе. Более длинный кривошипный рычаг соответствовал бы более высокой степени сжатия во время такта сжатия. В случае поршневого двигателя поршню потребовалось бы проходить более длинное расстояние. Тем не менее, большее расстояние, которое проходит поршень, означает больший суммарный рабочий объем двигателя и более высокую степень сжатия воздушно-топливной смеси во время такта сжатия. Степени сжатия бензина, наиболее распространенного источника топлива, ограничены максимальным соотношением, составляющим приблизительно 10:1, при превышении которого начинается детонация бензина. Длина кривошипного рычага в двигателе определяется механикой двигателя и максимальной степенью сжатия топлива. Длина кривошипного рычага не может быть увеличена, поскольку это привело бы к более высокой степени сжатия по сравнению с максимально допустимой степенью сжатия источника топлива.
Как описано здесь и известно в данной области техники, крутящий момент в двигателе преобразуется в мощность в лошадиных силах по формуле (1). Более высокая мощность в лошадиных силах может быть создана, если средство механического преобразования, предназначенное для преобразования существующего давления на поршне или роторе в крутящий момент непрерывно в течение всего такта расширения, может быть определено при одновременном сохранении благоприятных термодинамических свойств и механических свойств текучей среды. Больший крутящий момент и, следовательно, большая мощность в лошадиных силах могут быть созданы, если может быть определено механическое средство, которое может обеспечить приложение силы на более подходящем расстоянии от вала во время такта расширения.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с различными вариантами осуществления описан двигатель внутреннего сгорания, который достигает большего крутящего момента по сравнению с традиционным двигателем внутреннего сгорания. В соответствии с различными вариантами осуществления описан двигатель внутреннего сгорания, способный обеспечить отношение мощности в лошадиных силах к кубическому дюйму рабочего объема, составляющее приблизительно 4:1.
В соответствии с различными вариантами осуществления описан роторный двигатель, имеющий профиль с вогнутой формой, перемещающийся вокруг неподвижного выпуклого профиля.
В соответствии с различными вариантами осуществления описан роторный двигатель внутреннего сгорания, способный генерировать крутящий момент непрерывно в течение всего такта расширения. В соответствии с различными вариантами осуществления крутящий момент может создаваться непрерывно в течение всего такта расширения за счет регулирования угла наклона силы, создаваемой профилем с вогнутой формой, и противоположной силы, создаваемой неподвижной поверхностью.
В соответствии с одним вариантом осуществления предложен роторный двигатель, содержащий один или более подвижных профилей с по существу вогнутой формой и неподвижную выпуклую поверхность эллиптической формы, в котором подвижные профили с по существу вогнутой формой ограничены в перемещении вокруг неподвижной выпуклой поверхности для образования рабочего объема.
Предпочтительно, неподвижная выпуклая поверхность содержит профиль, представимый в полярных координатах как R+(2·R sin(D/2)/(K·cos(D/2)+sin(D/2)), где К - коэффициент пересчета - постоянная величина, которая составляет от 0,27 до 4,0; R - длина радиуса и D - угол поворота радиуса вокруг оси поворота.
Предпочтительно, коэффициент пересчета К составляет 1,0.
Рабочий объем способен изменяться по мере того, как подвижные профили с по существу вогнутой формой перемещаются вокруг неподвижной выпуклой поверхности.
При этом изменение рабочего объема может соответствовать такту впуска двигателя, такту сжатия, такту расширения или такту выпуска.
Также рабочий объем может различаться между двумя или более тактами: тактом впуска двигателя, тактом сжатия, тактом расширения и тактом выпуска.
При этом рабочий объем способен увеличиваться по мере того, как подвижные профили с по существу вогнутой формой перемещаются от места, имеющего меньший радиус кривизны на неподвижной выпуклой поверхности, к месту, имеющему больший радиус кривизны на неподвижной выпуклой поверхности.
В соответствии с другим вариантом осуществления предложен роторный двигатель, содержащий: камеру, ограниченную наружной стенкой камеры, задней стенкой камеры и внутренней стенкой камеры, окружающей обособленную часть, причем камера имеет впускное отверстие, выпускное отверстие и отверстие для зажигания; профиль с вогнутой формой, выполненный с возможностью перемещения внутри камеры и способный взаимодействовать с возможностью скольжения с одной или более из наружной стенки камеры и внутренней стенки камеры; палец кривошипа, расположенный на профиле с вогнутой формой; кривошипный диск, способный принимать палец кривошипа и приводиться им в движение; коленчатый вал, расположенный так, что он проходит через обособленную часть, и соединенный с кривошипным диском; и торцевую пластину, причем торцевая пластина, профиль с вогнутой формой, задняя стенка камеры и внутренняя стенка камеры образуют камеру с рабочим объемом, включающую в себя рабочий объем.
Профиль с вогнутой формой, предпочтительно, взаимодействует с возможностью скольжения с наружной стенкой камеры посредством удерживающего элемента.
Удерживающий элемент может представлять собой роликовую опору.
Рабочий объем способен увеличиваться по мере того, как профиль с вогнутой формой перемещается от места, имеющего меньший радиус кривизны на внутренней стенке камеры, к месту, имеющему больший радиус кривизны на внутренней стенке камеры.
Предпочтительно, форма внутренней стенки камеры содержит профиль, представимый в полярных координатах как
R+(2·R sin(D/2)/(К·cos(D/2)+sin(D/2)),
где К - постоянная, составляющая от 0,27 до 4,0, R - длина радиуса и D - угол поворота радиуса вокруг оси поворота.
При этом внутренняя кривая профиля с вогнутой формой зависит от профиля внутренней стенки камеры.
Предпочтительно, коленчатый вал расположен асимметрично внутри обособленной части, а расстояние от коленчатого вала до пальца кривошипа может изменяться в течение всего цикла двигателя и может непрерывно увеличиваться во время такта расширения или непрерывно уменьшаться во время такта сжатия.
Предпочтительно, каждый цикл двигателя содержит подциклы впуска, сжатия, расширения и выпуска, и каждый из подциклов соответствует величине поворота профиля с вогнутой формой вокруг внутренней стенки камеры, измеренной в градусах.
При этом величина поворота по меньшей мере для одного подцикла отличается от величины поворота для по меньшей мере одного другого подцикла, а рабочий объем по меньшей мере в одном подцикле отличается от рабочего объема в по меньшей мере двух других подциклах.
Предпочтительно, угол наклона между направлением создающей крутящий момент силы, действующей со стороны профиля с вогнутой формой, и касательной к наружной стенке камеры находится в интервале между нулем градусов и 90 градусами во время такта расширения.
При этом угол наклона может изменяться по мере перемещения профиля с вогнутой формой вокруг внутренней стенки камеры и может составлять от приблизительно 15 градусов до приблизительно 75 градусов, предпочтительно, от приблизительно 30 градусов до приблизительно 60 градусов, предпочтительно 45 градусов.
Двигатель может дополнительно содержать второй профиль с вогнутой формой, выполненный с возможностью перемещения внутри камеры и способный взаимодействовать с возможностью скольжения с наружной стенкой камеры и внутренней стенкой камеры.
При этом второй профиль с вогнутой формой расположен приблизительно на 180 градусов вокруг коленчатого вала от профиля с вогнутой формой в камере.
Двигатель может иметь вторую камеру, повернутую на 180 градусов вокруг коленчатого вала от камеры.
Предпочтительно, камера с рабочим объемом способна перемещаться внутри двигателя.
При этом перемещение камеры с рабочим объемом осуществляется вокруг коленчатого вала.
Предпочтительно, внутренняя стенка камеры имеет асимметричную форму.
Таким образом, в соответствии с различными вариантами осуществления двигатель внутреннего сгорания имеет по меньшей мере два профиля с вогнутой формой и один вал, расположенный внутри каждой из по меньшей мере двух камер, установленных под углом 180 градусов друг относительно друга, что позволяет образовать уравновешенный двигатель в сборе. В соответствии с различными вариантами осуществления каждая камера может быть выполнена с асимметричной формой.
В соответствии с различными вариантами осуществления длина плеча кривошипа роторного двигателя внутреннего сгорания, описанного здесь, может быть больше длины плеча кривошипа поршневого двигателя внутреннего сгорания с тем же рабочим объемом.
В соответствии с различными вариантами осуществления описан двигатель внутреннего сгорания, имеющий плечо кривошипа, длина которого изменяется в течение всего цикла работы двигателя. В соответствии с различными вариантами осуществления длина плеча кривошипа может увеличиваться в течение такта расширения и уменьшаться в течение такта сжатия.
В соответствии с различными вариантами осуществления коленчатый вал может быть расположен со смещением от центра внутри камеры роторного двигателя внутреннего сгорания.
В соответствии с различными вариантами осуществления двигатель внутреннего сгорания может иметь такты расширения, сжатия, впуска и выпуска, которые являются асимметричными по отношению к изменениям рабочего объема.
В соответствии с различными вариантами осуществления двигатель внутреннего сгорания может иметь асимметричное преобразование силы в крутящий момент между тактом расширения и тактом сжатия.
Изобретение также относится к способу создания непрерывно действующего крутящего момента в такте расширения роторного двигателя, который включает в себя: образование рабочего объема между неподвижной выпуклой внутренней стенкой камеры, задней стенкой камеры, подвижным профилем с по существу вогнутой формой и торцевой пластиной; перемещение профиля с по существу вогнутой формой вокруг неподвижной выпуклой внутренней стенки камеры путем плавного смещения профиля с по существу вогнутой формой вдоль наружной стенки камеры.
Предпочтительно, угол наклона между направлением создающей крутящий момент силы, действующей со стороны профиля с по существу вогнутой формой, и касательной к наружной стенке камеры находится в интервале между нулем и 90 градусами.
Предпочтительно, угол наклона составляет от приблизительно 15 градусов до приблизительно 75 градусов, более предпочтительно, от приблизительно 30 градусов до приблизительно 60 градусов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения, описанного здесь, и различные варианты осуществления по известному уровню техники приведены на сопровождающих фигурах, указанных ниже:
фиг.1a-d показывают различные положения поршня во время цикла работы двигателя в поршневом двигателе;
фиг.2 представляет собой график зависимости давления от объема поршневого двигателя;
фиг.3a-c показывают различные положения ротора во время цикла роторного двигателя Ванкеля;
фиг.4 показывает геометрическую связь между силой F(p), действующей со стороны поршня, и крутящим моментом, создаваемым вокруг коленчатого вала CS за счет движения поршня;
фиг.5 показывает график преобразования силы в крутящий момент для поршневого двигателя Р и для роторного двигателя внутреннего сгорания, описанного здесь;
фиг.6 показывает геометрическую связь между силой F(s), действующей со стороны стенки, и силой F(r), действующей со стороны ротора, когда сила, действующая со стороны ротора, и составляющие силы, действующей со стороны стенки, направлены по одной прямой;
фиг.7 показывает геометрическую связь между силой F(s), действующей со стороны стенки, и силой F(r), действующей со стороны ротора и создающей составляющую крутящего момента F(t), когда сила, действующая со стороны ротора, и составляющие силы, действующие со стороны стенки, не направлены по одной прямой;
фиг.8a представляет собой схематический чертеж одной поверхности ротора, когда поверхность ротора находится в таком положении, что рабочий объем находится на максимуме;
фиг.8b представляет собой схематический чертеж одной поверхности ротора, когда поверхность ротора находится в таком положении, что рабочий объем находится на минимуме;
фиг.9a представляет собой схематический чертеж одного варианта осуществления изобретения, в котором вогнутая поверхность находится в таком положении относительно неподвижной выпуклой поверхности, что рабочий объем находится на максимуме;
фиг.9b представляет собой схематический чертеж одного варианта осуществления изобретения, в котором вогнутая поверхность находится в таком положении относительно неподвижной выпуклой поверхности, что рабочий объем находится на минимуме;
фиг.10 показывает вид спереди одного варианта осуществления профиля с вогнутой формой по изобретению;
фиг.11 представляет собой сечение одного варианта осуществления профиля с вогнутой формой по изобретению, выполненное по линии 11-11 на фиг.10;
фиг.12 представляет собой схематический чертеж одного варианта осуществления камеры роторного двигателя, показывающий отверстия для впуска, зажигания и выпуска, торцевую пластину, профиль с вогнутой формой, палец кривошипа и удерживающий элемент;
фиг.13 представляет собой сечение роторного двигателя по фиг.12, выполненное по линии 13-13;
фиг.14 показывает геометрическую связь между радиусом и кривой, созданной радиусом, при которой длина радиуса сохраняется постоянной, когда радиус "поворачивается" на некоторую инкрементную величину в направлении против часовой стрелки вокруг оси поворота;
фиг.15 показывает геометрическую связь между радиусом и кривой, созданной радиусом, при которой длина радиуса увеличивается по мере того, как радиус "поворачивается" на некоторую инкрементную величину в направлении против часовой стрелки вокруг оси поворота;
фиг.16 представляет собой график кривой, образуемой, когда длина радиуса постоянно увеличивается по мере того, как радиус "поворачивается" в направлении против часовой стрелки вокруг оси поворота;
фиг.17 показывает форму варианта осуществления внутренней стенки камеры обособленной части и положение коленчатого вала на обособленной части, при этом форма связана с кривой по фиг.16;
фиг.18 представляет собой схематический чертеж одного варианта осуществления роторного двигателя, имеющего обособленную часть по фиг.17 с профилем с вогнутой формой, палец кривошипа, удерживающий элемент, коленчатый вал и наружную стенку камеры;
фиг.19a представляет собой графическое изображение связи между наружной стенкой камеры и обособленной частью по фиг.17;
фиг.19b представляет собой выполненное в масштабе графическое изображение части кривой по фиг.16, которая соответствует форме наружной стенки камеры по фиг.19a;
фиг.20 представляет собой выполненный с пространственным разделением элементов вид одного варианта осуществления двигателя, имеющего две камеры, коленчатый вал и кривошипный диск, причем каждая камера имеет два профиля с вогнутой формой, торцевую пластину, внутреннюю стенку камеры, заднюю стенку камеры и наружную стенку камеры, и каждый профиль с вогнутой формой имеет удерживающий элемент и палец кривошипа.
Аналогичные части имеют одинаковую нумерацию на всех фигурах. Следует понимать, что фигуры показывают различные варианты осуществления изобретения и могут быть выполнены не в масштабе. Другие варианты осуществления станут известными для специалистов-практиков в данной области техники при рассмотрении сопровождающего описания и приложенной формулы изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Для получения более эффективного двигателя внутреннего сгорания, который создает большую мощность в лошадиных силах и больший крутящий момент на единицу рабочего объема двигателя, несколько признаков традиционного двигателя внутреннего сгорания, по отдельности или совместно, могут быть изменены. Эти признаки могут включать в себя один или более из следующих:
взаимное расположение неподвижной поверхности камеры и движущейся части, которое создает изменения рабочего объема, угол, под которым сила приложена к коленчатому валу во время такта расширения, механическое преобразование силы в крутящий момент, создаваемый в течение всего такта расширения, и симметрия тактов двигателя по отношению к изменениям рабочего объема. Изменение одного или нескольких из этих признаков может привести к более энергетически эффективному двигателю внутреннего сгорания, как будет описано далее со ссылкой на фигуры.
Геометрическая схема традиционных двигателей внутреннего сгорания, включая как поршневые двигатели, так и роторные двигатели, функционирует посредством изменения объема пространства, в котором рабочая текучая среда может находиться в камере, или "рабочем объеме". Рабочий объем увеличивается при всасывании топлива, уменьшается при сжатии топлива, увеличивается при зажигании топлива и уменьшается при вытеснении побочных продуктов сгорания из камеры. В традиционных поршневых и роторных двигателях изменение рабочего объема может быть достигнуто за счет перемещения поршня или поверхности ротора с по существу выпуклой формой вдоль неподвижной вогнутой поверхности камеры, как можно видеть соответственно на фиг.1a-d и фиг.3a-c. Фиг.8a и 8b демонстрируют связь между неподвижной вогнутой поверхностью 11 камеры 10, одной поверхностью 5 ротора 22 выпуклой формы и рабочим объемом 170, созданным пространством между неподвижной вогнутой поверхностью 11 и выпуклой поверхностью 5 ротора. Как показано на фиг.8а, увеличение рабочего объема 170 в традиционном роторном двигателе происходит, когда выпуклая поверхность 5 ротора перемещается вокруг коленчатого вала 50 в направлении 23 от того места 150 на неподвижной вогнутой поверхности 11 камеры 10, которое имеет больший радиус кривизны, к месту 160 на вогнутой поверхности 11 камеры 10, которое имеет меньший радиус кривизны. Таким образом, рабочий объем 170 находится на максимуме, когда выпуклая поверхность 5 ротора находится в месте 160 на неподвижной вогнутой поверхности 11 камеры 10, которое имеет малый радиус кривизны. Как показано на фиг.8b, уменьшение рабочего объема 170 происходит, когда выпуклая поверхность 5 ротора перемещается вокруг коленчатого вала 50 в направлении 23 от места 160 на вогнутой поверхности 11 камеры, которое имеет меньший радиус кривизны, к месту 150 на вогнутой поверхности 11 камеры 10, которое имеет больший радиус кривизны. Таким образом, рабочий объем 170 находится на минимуме, когда выпуклая поверхность 5 ротора находится у места 150 на неподвижной вогнутой поверхности 11 камеры 10, которое имеет большой радиус кривизны.
Для повышения эффективности двигателя по сравнению с традиционным роторным или поршневым двигателем в одном варианте осуществления изобретения может быть изменена геометрическая схема того, каким образом создается рабочий объем. Более высокая степень регулирования того, каким образом двигатель механически преобразует силу в крутящий момент во время такта расширения, может быть достигнута путем изменения на обратное взаимного расположения движущейся выпуклой формы и неподвижной вогнутой формы, которое имеет место в традиционных двигателях. В соответствии с различными вариантами осуществления изобретения профиль с по существу вогнутой формой перемещается вокруг неподвижной выпуклой поверхности для создания изменения рабочего объема, как показано на фиг.9a и 9b. Как видно на фиг.9a, эта обратная перестановка движущейся части и неподвижной поверхности, при сравнении с традиционными двигателями, приводит к увеличению рабочего объема 170, когда профиль 24 с вогнутой формой перемещается вокруг коленчатого вала 50 на неподвижной выпуклой поверхности обособленной части 90 в направлении 29 от места 160 на неподвижной выпуклой поверхности, имеющего меньший радиус кривизны, к месту 150 на неподвижной выпуклой поверхности обособленной части 90, имеющему больший радиус кривизны. Как показано на фиг.9b, рабочий объем 170 уменьшается, когда профиль 24 с вогнутой формой перемещается вокруг коленчатого вала 50 в направлении 29 от места 150 на неподвижной выпуклой поверхности 90, имеющего больший радиус кривизны, к месту 160 на неподвижной выпуклой поверхности обособленной части 90, имеющему меньший радиус кривизны. То, как образуется рабочий объем, создает обратное взаимное расположение на неподвижной поверхности, где будет создаваться максимальный рабочий объем, по отношению к традиционным техническим решениям в области роторных двигателей.
Обратная перестановка традиционного пространственного взаимного расположения движущейся части и поверхности камеры в двигателе создает изменения рабочего объема за счет перемещения вогнутого пространства, которое ограничивает рабочий объем, вдоль некоторой неподвижной выпуклой поверхности в отличие от современных технических решений для двигателей, в которых некоторая подвижная выпуклая поверхность перемещается через рабочий объем в неподвижной вогнутой камере. Аналогия с поршневым двигателем заключается в удерживании поршня неподвижным и в перемещении цилиндрической камеры вверх и вниз вдоль поршня для создания изменений рабочего объема. Обратная перестановка движущейся части и неподвижной поверхности может быть использована для модификации вращательного движения в двигателе. В современных технических решениях для двигателей рабочий объем может увеличиваться только точно в обратном порядке по отношению к его уменьшению, поскольку, когда часть перемещается внутрь через рабочий объем в камере, часть может перемещаться наружу только опять по тому же пути, по которому она перемещалась внутрь через рабочий объем. Увеличение и уменьшение рабочего объема традиционного двигателя представляют собой точно обратные процессы и являются симметричными во всех четырех тактах впуска, сжатия, расширения и выпуска. При обратной перестановке движущейся части и неподвижной поверхности увеличение и уменьшение рабочего объема и силы, возникающие в результате этого, можно регулировать путем задания формы рабочего объема. Благодаря возможности регулирования траектории и формы рабочего объема может быть спроектировано благоприятное механическое преобразование силы в крутящий момент, в результате чего получают двигатель со значительно большей мощностью в лошадиных силах на единицу рабочего объема. Изменения рабочего объема могут происходить в зависимости от радиуса кривизны выпуклой поверхности, по которой скользит движущийся профиль с вогнутой формой. Рабочий объем может уменьшаться и увеличиваться в различной степени в зависимости от формы неподвижной выпуклой поверхности в каждой точке вдоль траектории перемещения профиля с вогнутой формой. Обратное взаимное расположение движущейся части и неподвижной поверхности в обращенном двигателе (двигателе с обратной перестановкой) позволяет получить четыре такта впуска, сжатия, расширения и выпуска, которые будут независимыми друг от друга и оптимизированными, так что такты могут быть асимметричными. Далее подробно рассматривается обращенный двигатель.
В соответствии с различными вариантами осуществления профиль с вогнутой формой, подобный показанному на фиг.10 и фиг.11 (сечение вдоль линии 11-11 на фиг.10), может быть использован в обращенном двигателе. Как показано на фиг.10 и 11, профиль 24 с вогнутой формой может быть полусферическим по форме и может быть аналогичным форме половины цилиндра в продольном направлении. Внутренняя кривая 200 профиля 24 с вогнутой формой может быть полукруглой или может иметь любую другую форму, которая дополняет форму внутренней стенки камеры двигателя. Внутренняя кривая 200 профиля 24 с вогнутой формой может иметь радиус кривизны, который меньше наименьшего радиуса кривизны внутренней стенки камеры. Профиль 24 с вогнутой формой имеет боковые участки 33, 34, которые могут оставаться в скользящем контакте с внутренней стенкой камеры, когда профиль 24 с вогнутой формой охватывает внутреннюю стенку камеры. Внутренняя кривая 200 и боковые участки 33, 34 профиля 24 с вогнутой формой вместе с внутренней стенкой камеры ограничивают рабочий объем. Наружная кривая 210 профиля 24 с вогнутой формой может иметь любую форму, пригодную для обеспечения контакта с наружной стенкой камеры двигателя, когда боковые участки 33, 34 находятся в контакте с внутренней стенкой камеры двигателя. Внутренняя кривая 200 профиля 24 с вогнутой формой может иметь любую форму, которая во взаимодействии с внутренней стенкой камеры может ограничивать рабочий объем, который обеспечивает заданную степень сжатия для воздушно-топливной смеси, когда профиль 24 с вогнутой формой плавно перемещается вдоль внутренней стенки камеры во время такта сжатия.
В соответствии с различными вариантами осуществления формы профиля с вогнутой формой, внутренней стенки камеры и наружной стенки камеры могут зависеть друг от друга. Эти формы должны обладать способностью взаимодействовать, но не ограничены в других отношениях и могут представлять собой любое множество криволинейных форм, не ограниченных сферами, эллипсами или другими традиционно определенными геометрическими формами. В соответствии с различными вариантами осуществления, в которых внутренняя кривая 200 профиля 24 с вогнутой формой является полукруглой и профиль с вогнутой формой имеет высоту, приблизительно равную ширине профиля с вогнутой формой, эффективная площадь поверхности внутренней кривой профиля с вогнутой формой, на которую действует давление, приблизительно в два раза превышает соответствующую площадь поршня при аналогичном объеме, что обеспечивает большую силу (сила = давление · площадь) для поворота коленчатого вала.
В соответствии с различными вариантами осуществления и как показано на фиг.10 и 11, профиль 24 с вогнутой формой может быть соединен с наружной стенкой камеры с возможностью отсоединения или постоянно с возможностью скольжения или может удерживаться в контакте с наружной стенкой камеры с помощью удерживающего элемента 130, который создает возможность плавного перемещения профиля 24 с вогнутой формой вдоль периферии наружной стенки камеры. К пригодным удерживающим элементам относятся роликовая опора, зубчатое колесо или другие выполненные с возможностью скольжения удерживающие элементы, известные специалистам-практикам в данной области техники, но пригодные удерживающие элементы не ограничены вышеуказанными. Удерживающий элемент может быть расположен центрально на наружной кривой 210 профиля 24 с вогнутой формой, как показано на фиг.10 и 11, или может быть смещен в одном или нескольких направлениях.
В соответствии с различными вариантами осуществления боковые участки 33, 34 профиля 24 с вогнутой формой могут быть соединены с внутренней стенкой камеры с возможностью отсоединения или постоянно с возможностью скольжения или могут удерживаться в контакте с внутренней стенкой камеры. Боковые участки 33, 34 профиля 24 с вогнутой формой могут иметь выполненный с возможностью скольжения соединитель, такой как роликовая опора, зубчатое колесо или другой выполненный с возможностью скольжения соединитель, известный специалистам-практикам в данной области техники, но возможные соединители не ограничены вышеуказанными, при этом соединитель расположен на одном или нескольких боковых участках 33, 34 профиля 24 с вогнутой формой, при этом выполненный с возможностью скольжения соединитель создает возможность плавного перемещения боковых участков 33, 34 профиля 24 с вогнутой формой вдоль периферии внутренней стенки камеры.
В соответствии с различными вариантами осуществления и как показано на фиг.10 и 11, палец 120 кривошипа может быть размещен на профиле 24 с вогнутой формой так, что палец 120 кривошипа будет простираться за переднюю поверхность профиля 24 с вогнутой формой. В соответствии с различными вариантами осуществления палец 120 кривошипа может быть расположен таким образом, что он будет простираться за переднюю поверхность профиля 24 с вогнутой формой в любом месте, достаточном для (обеспечения) взаимодействия с кривошипным диском. Палец 120 кривошипа может быть использован для толкания кривошипного диска, расположенного снаружи камеры вокруг коленчатого вала, когда профиль 24 с вогнутой формой перемещается вдоль внутренней стенки камеры.
В соответствии с различными вариантами осуществления и как показано на фиг.12, профиль 24 с вогнутой формой может иметь вогнутую внутреннюю кривую 200, которая взаимодействует с неподвижной выпуклой поверхностью 100. Неподвижная выпуклая поверхность представляет собой внутреннюю стенку 100 камеры 10. Неподвижная выпуклая поверхность 100 может представлять собой наружную поверхность обособленной части 90. Неподвижная выпуклая поверхность 100, внутренняя кривая 200 профиля 24 с вогнутой формой и задняя стенка 180 камеры вместе с торцевой пластиной 140 образуют камеру с рабочим объемом для рабочего объема 170. Вогнутая внутренняя поверхность 200 профиля 24 с вогнутой формой функционально может быть эквивалентной одной поверхности ротора в традиционном роторном двигателе. Наружная кривая 210 профиля 24 с вогнутой формой может взаимодействовать с наружной стенкой 110 камеры и скользить вдоль наружной стенки 110 камеры посредством удерживающего элемента 130. Наружная кривая 210 профиля 24 с вогнутой формой может обеспечить удерживание боковых участков 33, 34 профиля 24 с вогнутой формой у внутренней стенки 100 камеры в соответствии с различными вариантами осуществления. Профиль 24 с вогнутой формой может скользить или перемещаться вдоль внутренней стенки 100 камеры с помощью соединителя, выполненного с возможностью скольжения. Перемещение профиля 24 с вогнутой формой вокруг внутренней стенки 100 камеры приводит к приведению во вращение коленчатого вала 50 посредством кривошипного диска (непоказанного), который взаимодействует как с коленчатым валом 50, так и с профилем 24 с вогнутой формой у пальца 120 кривошипа. В соответствии с различными вариантами осуществления форма контура 24 с вогнутой формой, неподвижной выпуклой поверхности 100 обособленной части 90, задней стенки 180 камеры и торцевой пластины 140 могут зависеть друг от друга. Эти формы должны обладать способностью взаимодействовать, но не ограничены в других отношениях, и могут представлять собой любое множество криволинейных форм, не ограниченных сферами, эллипсами или другими традиционно определенными геометрическими формами.
В соответствии с различными вариантами осуществления камера 10 может быть спроектирована с высотой, равной толщине профиля 24 с вогнутой формой. Камера 10 может быть образована внутренней стенкой 100 камеры, которая ограничивает обособленную часть 90, наружной стенкой 110 камеры и задней стенкой 180 камеры. Камера может быть образована из одной или нескольких деталей из металла, керамики или других пригодных материалов, известных специалистам-практикам в данной области техники. В соответствии с различными вариантами осуществления внутренняя стенка 100 камеры, обособленная часть 90, наружная стенка 110 камеры и задняя стенка 180 камеры могут быть образованы путем фасонного фрезерования или механической обработки и литья соответствующего материала. В соответствии с различными вариантами осуществления обособленная часть 90 и образующая одно целое внутренняя стенка 100 камеры могут быть образованы отдельно от наружной стенки 110 камеры и задней стенки 180 камеры и присоединены к ним с помощью любых средств, известных специалистам-практикам в данной области техники, таких как, например, сварка, термоклей, склеивание, штамповка или механическое скрепление, но возможные средства не ограничены вышеуказанными. В еще одном варианте осуществления обособленная часть 90 может быть помещена в пространство, ограниченное внутренней стенкой 100 камеры, при этом внутренняя стенка 100 камеры может быть образована за одно целое с задней стенкой 180 камеры и, возможно, с наружной стенкой 110 камеры. Обособленная часть 90 может представлять собой полость, ограниченную внутренней стенкой 100 камеры. В соответствии с различными вариантами осуществления обособленная часть 90 может представлять собой сплошное тело.
В соответствии с различными вариантами осуществления и как показано на фиг.12, торцевая пластина 140 может быть размещена поперек камеры 10 так, что она будет закрывать обособленную часть 90, внутреннюю стенку 100 камеры, часть профиля 24 с вогнутой формой, включающую в себя внутреннюю кривую 200, и часть задней стенки 180 камеры для образования камеры с рабочим объемом, которая включает в себя рабочий объем 170. В соответствии с различными вариантами осуществления торцевая пластина 140 может быть смонтирована на или прикреплена к обособленной части 90, внутренней стенке 100 камеры или к обоим этим элементам так, что торцевая пластина 140 не будет контактировать с коленчатым валом 50 или профилем 24 с вогнутой формой или мешать перемещению коленчатого вала 50 или профиля 24 с вогнутой формой. В соответствии с различными вариантами осуществления торцевая пластина 140 закрывает обособленную часть 90 и внутреннюю стенку 100 камеры, выступая за внутреннюю стенку 100 камеры поперек камеры 10 на расстояние, достаточное для обеспечения взаимодействия с профилем 24 с вогнутой формой и закрытия рабочего объема 170. Торцевая пластина 140 может иметь отверстие для прохода коленчатого вала 50 через торцевую пластину 140. В другом варианте осуществления торцевая пластина 140 может проходить от внутренней стенки 100 камеры поперек камеры 10 на расстояние, достаточное для обеспечения взаимодействия с профилем 24 с вогнутой формой и закрытия рабочего объема 170, но она не будет закрывать всю обособленную часть 90. В соответствии с различными вариантами осуществления торцевая пластина 140 не препятствует движению пальца 120 кривошипа, расположенного на профиле 24 с вогнутой формой. В соответствии с различными вариантами осуществления торцевая пластина 140 не создает препятствий для перемещения кривошипного диска.
В соответствии с различными вариантами осуществления и как показано на фиг.12, впускное отверстие 60, выпускное отверстие 70 и отверстие 80 для зажигания могут быть расположены внутри камеры 10 на задней стенке 180 камеры в пределах зоны рабочего объема 170, когда рабочий объем 170 перемещается внутри камеры 10. Местоположение отверстий 60, 70 и 80, показанное на фиг.12, предполагает перемещение 29 профиля 24 с вогнутой формой в направлении против часовой стрелки вокруг внутренней стенки 100 камеры по мере того, как двигатель последовательно выполняет такты впуска, сжатия, расширения и выпуска. Отверстия 60, 70 и 80 могут быть расположены в местах, соответствующих тем местам, где каждый соответствующий такт происходит внутри камеры 10. В соответствии с различными вариантами осуществления отверстие 80 для зажигания может быть расположено на задней стенке 180 камеры в том месте, где рабочий объем 170 находится на минимуме и топливо, имеющееся в камере 10, сжимается в рабочем объеме 170 в максимальной степени. В этом месте смесь топлива и воздуха в рабочем объеме 170 может быть воспламенена искрой из отверстия 80 для зажигания. При перемещении профиля с вогнутой формой вокруг внутренней стенки 100 камеры и увеличении рабочего объема 170 до максимума из-за сгорания воздушно-топливной смеси такт расширения может быть завершен. После такта расширения профиль 24 с вогнутой формой может перемещаться вокруг внутренней стенки 100 камеры при одновременном уменьшении рабочего объема 170, что приводит к вытеснению израсходованного топлива и газов из выпускного отверстия 70 камеры 10 в такте выпуска. По мере того как профиль 24 с вогнутой формой продолжает перемещаться вокруг внутренней стенки 100 камеры, может начаться такт впуска, поскольку рабочий объем 170 увеличивается и топливо и воздух всасываются внутрь через впускное отверстие 60. Профиль 24 с вогнутой формой перемещается вокруг внутренней стенки 100 камеры по мере того, как рабочий объем 170 уменьшается, что приводит к сжатию воздушно-топливной смеси до тех пор, пока профиль 24 не "дойдет" до отверстия 80 для зажигания. После этого цикл двигателя может повториться.
В соответствии с различными вариантами осуществления коленчатый вал 50 может быть расположен центрально в обособленной части 90, как показано, например, на фиг.12. В соответствии с различными вариантами осуществления коленчатый вал 50 может быть расположен со смещением от центра в обособленной части 90, что создает возможность перемещения профиля с вогнутой формой внутри камеры 10 вокруг внутренней стенки 100 камеры с переменным радиусом. Радиус может представлять собой расстояние от коленчатого вала 50 до пальца 120 кривошипа на профиле 24 с вогнутой формой в любой заданный момент времени. Это расстояние может представлять собой длину плеча механического кривошипа. При смещенном коленчатом вале 50 радиус изменяется по мере того, как профиль 24 с вогнутой формой перемещается вокруг внутренней стенки 100 камеры. Изменяющийся радиус создает возможность изменения суммарного крутящего момента на коленчатом валу 50 в течение всего цикла двигателя. При увеличении радиуса крутящий момент на коленчатом валу 50 может увеличиваться. При уменьшении радиуса крутящий момент на коленчатом валу 50 может уменьшаться. В соответствии с различными вариантами осуществления, в которых коленчатый вал 50 смещен, в кривошипном диске могут быть предусмотрены пазы для приспосабливания к изменяющемуся положению пальца 120 кривошипа, когда профиль 24 с вогнутой формой перемещается вокруг коленчатого вала 50 и приводит коленчатый вал 50 во вращение за счет взаимодействия с кривошипным диском посредством пальца 120 кривошипа.
Фиг.13 представляет собой выполненное вдоль линии 13-13 сечение варианта осуществления, изображенного на фиг.12, дополнительно показывающее положение кривошипного диска 35, имеющего один или несколько пазов 36. Как показано на фиг.13, в соответствии с различными вариантами осуществления двигатель может включать в себя кривошипный диск 35 со стороны торцевой пластины 140, противоположной по отношению к камере 10. В соответствии с различными вариантами осуществления кривошипный диск 35 может включать в себя один или несколько пазов 36 для взаимодействия с пальцем 120 кривошипа на профиле 24 с вогнутой формой. В соответствии с различными вариантами осуществления паз 36 может представлять собой выемку, полость, канал или другое углубление в кривошипном диске 35, способное "принимать" палец 120 кривошипа, как показано на фиг.13. В соответствии с различными вариантами осуществления паз 36 может простираться через кривошипный диск 35 так, что палец 120 кривошипа сможет простираться через кривошипный диск 35 и за пределы верхней поверхности кривошипного диска 35. Кривошипный диск 35 может быть соединен с коленчатым валом 50 непосредственно или посредством взаимодействия одного или более из устройств, включающих зубчатую передачу, ремень или другое устройство, способное приводить коленчатый вал 50 во вращение. В соответствии с различными вариантами осуществления кривошипный диск 35 постоянно прикреплен к коленчатому валу 50, так что коленчатый вал 50 вращается вместе с кривошипным диском 35. В соответствии с различными вариантами осуществления кривошипный диск 35 может быть приведен во вращение по круговой или почти круговой траектории вокруг коленчатого вала 50 за счет перемещения профиля 24 с вогнутой формой, который взаимодействует с кривошипным диском 35 посредством пальца 120 кривошипа, который входит в паз 36 кривошипного диска 35. По мере того как профиль 24 с вогнутой формой перемещается вокруг внутренней стенки 100 камеры, палец 120 кривошипа может скользить взад и вперед в пазу 36, когда радиус увеличивается или уменьшается. Взаимодействие кривошипного диска 35, паза 36 и пальца 120 кривошипа обеспечивает функционирование, подобное функционированию с плечом кривошипа, имеющим переменную длину. В соответствии с различными вариантами осуществления коленчатый вал 50 может быть расположен центрально через кривошипный диск 35. В соответствии с различными вариантами осуществления кривошипный диск 35 может иметь более одного паза 36, так что более одного профиля 24 с вогнутой формой сможет одновременно взаимодействовать с кривошипным диском 35. В соответствии с различными вариантами осуществления, в которых более одного профиля 24 с вогнутой формой может одновременно взаимодействовать с кривошипным диском 35, пазы 36 расположены в кривошипном диске 35 для фиксации каждого профиля 24 с вогнутой формой в некотором положении относительно внутренней стенки 100 камеры или относительно коленчатого вала 50.
В соответствии с различными вариантами осуществления крутящий момент может быть обеспечен в течение всего такта расширения за счет создания камеры с такой конструкцией, что угол наклона между направлением силы, действующей со стороны профиля с вогнутой формой, и направлением силы, действующей со стороны наружной стенки камеры, в каждой точке вдоль наружной стенки камеры во время такта расширения представляет собой некоторый угол, который больше 0 градусов и меньше 90 градусов. Формы внутренней стенки камеры, наружной стенки камеры и профиля с вогнутой формой, которые способствуют углу наклона в интервале между 0 градусами и 90 градусами, могут быть определены алгебраически с учетом заданного угла наклона. Величина крутящего момента, создаваемого с помощью заданного угла С наклона, образуемого силой F(r), взаимодействующей с поверхностью, может быть равна F(r) · расстояние D · cos(C) · sin(C), как было рассмотрено ранее. Как может быть определено математически, крутящий момент имеет максимальную величину, когда угол С наклона составляет 45 градусов. Величина произведения косинуса и синуса для угла 45 градусов равна 0,5. В соответствии с различными вариантами осуществления другие углы наклона, составляющие от приблизительно 20 градусов до приблизительно 70 градусов, могут обеспечивать создание подходящих величин крутящего момента. В соответствии с различными вариантами осуществления угол наклона может изменяться в течение всего такта расширения. Угол наклона может уменьшаться в течение всего такта расширения.
Как показано на фиг.14, если бы радиус R поддерживался постоянным при повороте его на некоторый угол D вокруг точки CS, касательная C к дуге, описанной радиусом R, образовывала бы прямую линию между точками X и Z. Касательная C образует прямой угол по отношению к радиусу в центре дуги (угол D/2). Если бы линия X-Z также описывала поверхность камеры, с которой "сталкивается" радиус, угол D/2, то есть угол наклона между направлением силы, "действующей" со стороны радиуса, и направлением силы, действующей со стороны поверхности, был бы равен 0. Эта зависимость описывает состояние при использовании традиционных технических решений для роторных двигателей, при котором угол наклона равен 0 в начале и в конце такта расширения. Для обеспечения наличия крутящего момента в течение всего такта расширения угол наклона может иметь значения в интервале между 0 и 90 градусами в каждый момент во время такта расширения.
Фиг.15 показывает касательную C между точками Y и Z к дуге, созданной при повороте изменяющегося радиуса на некоторый угол D вокруг фиксированной точки CS. Если касательная C представляет собой поверхность, с которой "сталкивается" изменяющийся радиус, угол наклона между направлением силы, "действующей" со стороны радиуса, и направлением силы, действующей со стороны поверхности, составляет угол Е, который представляет собой некоторый угол между 0 градусами и 90 градусами. Изменяющаяся длина радиуса в любой заданной точке на фиг.15 может быть равна R+dR, где R представляет собой исходную длину радиуса и dR представляет собой переменную длину, равную или большую 0. Если значения R и dR известны на угле D, угол Е наклона может быть рассчитан. Напротив, если угол Е наклона известен для средней точки D/2 некоторого угла D поворота, длина dR может быть определена.
В соответствии с различными вариантами осуществления математическая формула для кривой может быть получена для случая, когда радиус кривой образует угол наклона, который больше 0 градусов и меньше 90 градусов, с поверхностью в каждой точке вдоль кривой, когда радиус вращается вокруг фиксированной точки отсчета при вращении. В соответствии с различными вариантами осуществления угол наклона может находиться в интервале от приблизительно 20 градусов до приблизительно 70 градусов в каждой точке вдоль кривой. Математическая формула может быть использована для получения кривой, которая может представлять собой контур подвижного профиля и части неподвижной внутренней стенки камеры. В соответствии с различными вариантами осуществления математическая формула кривой может быть получена и выражена в полярных координатах, где радиус кривизны образует угол наклона, который больше чем 0° и меньше чем 90°, с поверхностью в каждой точке вдоль кривой, когда радиус вращается вокруг фиксированной точки отсчета при вращении. В соответствии с различными вариантами осуществления угол наклона может находиться в интервале от приблизительно 20° до приблизительно 70° в каждой точке вдоль кривой. Математическая формула может использоваться для получения кривой, которая может являться контуром подвижного профиля и части неподвижной внутренней стенки камеры. Математическая формула может выражать кривую в полярных координатах.
Как показано на фиг.15, заданный угол Е наклона может быть использован для расчета величины dR, на которую радиус R должен увеличиться для поддержания угла Е наклона, когда радиус (R+dR) вращается вокруг коленчатого вала. При угле Е наклона, составляющем 45°, треугольник XYZ на фиг.15 имеет стороны XY и XZ одинаковой длины. Формула для определения изменения dR радиуса по отношению к радиусу R, необходимого для создания угла Е наклона, составляющего 45 градусов, следующая:



Формула 16 показывает, что для заданного угла D поворота, например, составляющего 1 градус, радиус R должен измениться на определенную долю в процентах, равную длине dR. Доля в процентах dR/R, на которую радиус R должен измениться, является постоянной для сохранения постоянного угла Е наклона, равного 45 градусам, на некотором угле D поворота. Изменение доли в процентах может представлять собой увеличение длины. Например, при использовании формулы 16 для угла Е наклона, составляющего 45 градусов, который должен быть создан на угле повороте, равном 1 градусу, радиус R может увеличиться приблизительно на 1,76%. Доля в процентах (dR), на которую изменяется радиус R, может оставаться постоянной независимо от исходной величины R для каждого градуса поворота. Общая формула для углов, отличных от 45 градусов, может быть получена путем умножения правой стороны формулы 16 на коэффициент К пересчета (масштабный множитель). Коэффициент К пересчета представляет собой разность длины стороны XY треугольника XYZ и длины стороны XZ, когда угол Е наклона меняется от 45 градусов - угла, при котором длины XY и XZ равны. Когда угол Е наклона не равен 45 градусам, формула имеет вид:

Коэффициент пересчета К равен 1/tan(Е). Когда угол Е составляет 45 градусов, 1/tan(Е)=1, что приводит к получению формулы 16. Когда угол Е не равен 45 градусам, К имеет некоторое значение, не равное 1. Формула 17 может быть использована для определения того, на какую долю в процентах радиус R должен измениться на некотором градусе D поворота для создания заданного угла Е наклона. Кривая, полученная по формуле 16 или 17, при использовании постоянного угла Е наклона может быстро спирально закручиваться наружу от фиксированной оси вращения. Для менее резко закручивающейся спирали с меньшим процентным изменением радиуса может быть использован изменяющийся угол Е наклона. Например, угол наклона в начале кривой может составлять 45 градусов или более и менее 90 градусов и может постепенно уменьшаться по мере поворота радиуса R вокруг фиксированной точки. В соответствии с различными вариантами осуществления изменяющийся угол наклона, например непрерывно уменьшающийся угол наклона, может поддерживаться между 90 градусами и 0 градусами или между 70 градусами и 20 градусами. При рассмотрении формулы 14 в связи с фиг.15 можно видеть, что член dR·sin(D/2) образует очень малую величину относительно остальных членов формулы. Если бы член dR·sin(D/2) был бы вычтен из члена 2·R·sin(D/2) вместо прибавления к нему, величина радиуса R по-прежнему возрастала бы, но более плавно, и угол Е наклона был бы постепенно уменьшающимся. Вычитание члена dR·sin(D/2) из члена 2·R·sin(D/2) и умножение на коэффициент пересчета К для исходного угла наклона, отличного от 45 градусов, приводит к следующей формуле:

В соответствии с различными вариантами осуществления при использовании приведенной выше формулы 18 в формуле R+dR с исходной длиной радиуса R, составляющей 2, и исходным углом Е наклона, составляющим 45°, К будет равен 1, и будет получена кривая, подобная показанной на Фиг.16.
На фиг.16 показана приведенная в качестве примера кривая, описываемая формулой 18, а также графическое изображение двух окружностей, одной с радиусом, равным 1 единице, и одной с радиусом, равным 2 единицам. Как показано на фиг.16, линия, проведенная из начала до касательной в любой точке на кривой, созданной в соответствии с формулой 18, будет иметь угол наклона, составляющий 45 градусов при 0 градусах поворота, и угол наклона будет постепенно уменьшаться до приблизительно 20 градусов при 90 градусах поворота. Может быть создана внутренняя стенка камеры, имеющая профиль кривой по фиг.16, что может привести к углу наклона с профилем с вогнутой формой, исходная величина которого составляет 45 градусов при 0 градусах поворота и который постепенно уменьшается до приблизительно 20 градусов при 90 градусах поворота. Поскольку профиль наружной стенки камеры может представлять собой функцию от профиля внутренней стенки камеры, угол наклона между направлением составляющей силы, создающей крутящий момент и действующей со стороны профиля с вогнутой формой, и силы, действующей со стороны наружной стенки камеры, также будет изменяться от 45 градусов до приблизительно 20 градусов во время такта расширения.
Для образования профиля внутренней стенки камеры кривая, описываемая формулой 18, например кривая, показанная на фиг.16, может быть повторена и повернута на 180 градусов для образования двух пересекающихся кривых одинаковой формы, как показано на фиг.17. Форма, созданная, например, на фиг.17, может определять форму внутренней стенки камеры и обособленной части, вокруг которой профиль с вогнутой формой может вращаться внутри камеры. Точка начала кривой, описываемой формулой 18, может представлять собой местоположение коленчатого вала внутри обособленной части. В соответствии с различными вариантами осуществления и как показано на фиг.17, коленчатый вал может быть смещен от центра внутри обособленной части. Профиль с вогнутой формой, который сопрягается с формой внутренней стенки камеры, может быть создан, как показано на фиг.18.
Профиль 24 с вогнутой формой, подобный приведенному в качестве примера на фиг.18, может иметь палец 120 кривошипа и удерживающий элемент 130, смещенные относительно центра внутренней кривой 200. Положение пальца 120 кривошипа и удерживающего элемента 130 может соответствовать геометрическому центру вращения, используемому для построения внутренней кривой 200, причем данный центр вращения может соответствовать началу кривой, описываемой формулой 18, или положению коленчатого вала 50. На фиг.18 показана связь внутренней стенки 100 камеры, обособленной части 90, наружной стенки 110 камеры, профиля 24 с вогнутой формой, имеющего палец 120 кривошипа и удерживающий элемент 130, и коленчатого вала 50 в камере 10, причем профиль и/или положение каждого из указанных элементов определен по отношению к кривой, описываемой формулой 18.
В соответствии с различными вариантами осуществления форма наружной стенки камеры может быть образована путем перемещения профиля с вогнутой формой вокруг внутренней стенки камеры. Наружная стенка камеры может быть спроектирована такой, чтобы обеспечить удерживание профиля с вогнутой формой у внутренней стенки камеры, пока удерживающий элемент или наружная кривая профиля с вогнутой формой перемещается вдоль наружной стенки камеры. На фиг.18 изображена форма наружной стенки 110 камеры, полученная исходя из внутренней стенки 100 камеры и профиля 24 с вогнутой формой, подобных показанным на фиг.18. Наружная стенка 110 камеры может быть получена из той же математической функции, что и внутренняя стенка 100 камеры. В соответствии с различными вариантами осуществления наружная стенка 110 камеры может иметь такую же форму, как, по меньшей мере, участок внутренней стенки 100 камеры, но большую по масштабу и повернутую на некоторый угол, например на 90°, вокруг начала на участке камеры 10, который соответствует такту расширения.
На фиг.19а изображена внутренняя стенка 100 камеры, созданная исходя из кривой по фиг.16, и наружная стенка 110 камеры, созданная за счет скольжения профиля с вогнутой формой вокруг внутренней стенки 100 камеры. Профиль наружной стенки 110 камеры соответствует измененному в масштабе варианту кривой, использованной для создания внутренней стенки 100 камеры. На фиг.19b изображен измененный в масштабе вариант 310 кривой внутренней стенки камеры, показанной на фиг.16. Как можно видеть при рассмотрении фиг.19a и 19b, форма наружной стенки 110 камеры, необходимая для удерживания профиля с вогнутой формой в постоянном контакте с внутренней стенкой 100 камеры, может представлять собой измененный в масштабе вариант профиля внутренней стенки 100 камеры, по меньшей мере, на участке наружной стенки 110 камеры, который соответствует такту расширения.
Кривая внутренней стенки камеры может отличаться от той, которая определена приведенной здесь формулой. Такие отклонения формы кривой внутренней стенки камеры могут быть использованы для повышения эффективности всего цикла работы двигателя и создания асимметричных изменений рабочего объема во время различных тактов. Например, такт выпуска и такт сжатия, как правило, характеризуются в традиционных двигателях как такты, которые вызывают уменьшение рабочего объема соответственно на одну и ту же величину. В двигателе, описанном здесь, такт выпуска и такт сжатия могут быть независимыми друг от друга, поскольку каждый такт физически происходит в другой части камеры двигателя и может иметь рабочий объем отличающейся величины. Такт выпуска может быть спроектирован так, что он будет вызывать уменьшение рабочего объема в большей степени по сравнению с тактом сжатия, чтобы обеспечить более полный выпуск побочных продуктов сгорания. Более полный выпуск может быть обеспечен за счет изменения формы внутренней стенки камеры в месте, соответствующем такту выпуска, так что форма внутренней стенки камеры будет создавать большее изменение рабочего объема во время данного такта. В результате изменения формы внутренней стенки камеры могут быть получены такты, которые больше не являются симметричными в отношении изменений рабочего объема. Может быть создан асимметричный цикл работы двигателя, в котором рабочий объем в одном такте изменяется на величину, отличную от той, на которую он изменился в одном или нескольких из оставшихся тактов впуска, выпуска, сжатия или расширения. Другие изменения формы внутренней стенки камеры для получения других инкрементных повышений эффективности будут очевидными для специалистов-практиков в данной области техники при рассмотрении и/или осуществлении на практике данного описания и связанных с ним чертежей.
На фиг.5 показан график, представляющий собой сравнение функции преобразования силы в крутящий момент в поршневом двигателе с функцией преобразования силы в крутящий момент в обращенном асимметричном роторном двигателе, подобном описанному здесь, во время такта расширения, при этом два двигателя имеют одинаковый рабочий объем (литраж). Крутящий момент, созданный поршневым двигателем (Р), находится на нуле в начале такта расширения, даже несмотря на то, что давление на поршень в этот момент является наибольшим. Величина создаваемого крутящего момента возрастает до некоторого максимального значения и уменьшается обратно до нуля во время такта расширения. График функции механического преобразования для обращенного асимметричного роторного двигателя со сравнимым рабочим объемом не начинается в нуле. График для обращенного асимметричного роторного двигателя имеет некоторое значение в начале такта расширения, и данное значение увеличивается во время такта расширения, в результате чего обеспечивается непрерывное преобразование силы в крутящий момент. Непрерывное преобразование силы в крутящий момент, которое можно видеть на кривой для обращенного асимметричного роторного двигателя, может быть обусловлено увеличением механической длины плеча кривошипа в течение всего такта расширения обращенного асимметричного роторного двигателя. Непрерывное преобразование силы в крутящий момент, которое можно видеть на кривой для обращенного асимметричного роторного двигателя, может быть обусловлено оптимизацией угла наклона между направлением силы, действующей со стороны профиля с вогнутой формой, и направлением силы, действующей со стороны наружной стенки камеры. Сравнение площадей под кривыми Р и IDAR функции преобразования показывает, что обращенный асимметричный роторный двигатель обладает приблизительно в 4 раза большей способностью к генерированию крутящего момента по сравнению с традиционным поршневым двигателем с таким же рабочим объемом.
Обращенный асимметричный роторный (IDAR) двигатель, создающий непрерывно действующий крутящий момент, может быть создан с постоянным или изменяющимся углом наклона между направлением силы, действующей со стороны профиля с вогнутой формой, и направлением силы, действующей со стороны наружной стенки камеры. Получающийся в результате двигатель создает крутящий момент непрерывно в течение всего такта расширения. Размещение коленчатого вала на обособленной части и форма внутренней стенки камеры в обращенном асимметричном роторном двигателе могут обеспечить образование асимметричной траектории для профиля с вогнутой формой, когда он охватывает внутреннюю стенку камеры. Перемещение профиля с вогнутой формой вызывает перемещение камеры с рабочим объемом и, следовательно, рабочего объема вокруг коленчатого вала. Радиус, проведенный от коленчатого вала до наружной стенки камеры или пальца кривошипа, изменяется в течение всех четырех тактов впуска, сжатия, расширения и выпуска по мере того, как профиль с вогнутой формой перемещается вокруг внутренней стенки камеры, что делает такты асимметричными по отношению к расстоянию от фиксированной точки поворота и создает асимметричные рабочие объемы, поскольку размер камеры с рабочим объемом изменяется.
В соответствии с различными вариантами осуществления может быть создан обращенный асимметричный роторный двигатель, имеющий две или более камер, повернутых вокруг коленчатого вала и расположенных друг относительно друга так, чтобы минимизировать вибрацию и биение и добиться движения с уравновешенностью во всем двигателе. В соответствии с различными вариантами осуществления и как показано на фиг.20, две камеры 10 могут быть расположены рядом друг с другом и соединены вдоль коленчатого вала 50. Каждая камера 10 может включать в себя внутреннюю стенку 100 камеры вокруг обособленной части 90, наружную стенку 110 камеры, заднюю стенку 180 камеры, профиль 24 с вогнутой формой, имеющий палец 120 кривошипа и удерживающий элемент 130, и торцевую пластину 140. Палец 120 кривошипа каждого профиля 24 с вогнутой формой может взаимодействовать с пазом 36 на кривошипном диске 35, присоединенном к коленчатому валу 50. В соответствии с различными вариантами осуществления паз может представлять собой выемку, полость, канал или углубление, способное "принимать" палец 120 кривошипа в кривошипном диске 35. В соответствии с различными вариантами осуществления паз может проходить через кривошипный диск 35 так, что палец 120 кривошипа сможет проходить через кривошипный диск 35 и за пределы верхней поверхности кривошипного диска 35. Каждое вращательное движение профиля 24 с вогнутой формой вокруг внутренней стенки 100 камеры вызывает вращение кривошипного диска 35 и коленчатого вала 50 за счет взаимодействия пальца 120 кривошипа с кривошипным диском 35. В соответствии с различными вариантами осуществления каждый профиль 24 с вогнутой формой находится в соответствующем такте расширения в разное время. Коленчатый вал 50 расположен так, чтобы создавать возможность поворота, которому не препятствует торцевая пластина 140 или обособленная часть 90, находящаяся в пределах внутренней стенки 100 камеры. Каждая камера 10 может быть расположена внутри моторного блока. Моторные блоки могут быть соединены вместе за зоной расположения кривошипного диска 35 болтами, винтами, посредством варки, клеев, других способов и средств скрепления, известных обычному специалисту в данной области техники, или их комбинации. Моторные блоки могут быть соединены для создания достаточного пространства для перемещения кривошипного диска 35, размещения кривошипного диска 35 между камерами 10, установки торцевой пластины 140 на каждой камере 10 или комбинации данных операций. В соответствии с различными вариантами осуществления камеры 10 могут иметь общий кривошипный диск 35, или каждая камера 10 может иметь отдельный кривошипный диск 35.
В соответствии с различными вариантами осуществления и как показано на фиг.20, два профиля 24 с вогнутой формой могут быть размещены в камере 10, и кратное число таких камер может быть соединено у их периферии за пределами траектории движения кривошипного диска 35. Коленчатый вал 50 может простираться через каждую камеру 10. Каждый профиль 24 с вогнутой формой может быть присоединен к кривошипному диску 35 посредством соответствующего пальца 120 кривошипа, так что один кривошипный диск 35 может быть приведен во вращение четырьмя профилями 24 с вогнутой формой, соединенными с ним. В соответствии с различными вариантами осуществления один профиль с вогнутой формой может быть размещен в каждой из четырех камер. В соответствии с различными вариантами осуществления любое число профилей с вогнутой формой, равное или большее единице, например один, два, четыре или восемь, может быть присоединено к одному кривошипному диску. В соответствии с различными вариантами осуществления, имеющими две или более камер 10, камеры 10 могут быть смещены друг от друга вокруг коленчатого вала 50 для создания движения с обеспечением уравновешенности вокруг коленчатого вала, как показано на фиг.20. В соответствии с различными вариантами осуществления, например, две камеры могут быть размещены вокруг коленчатого вала и повернуты на 180 градусов друг относительно друга, три камеры могут быть размещены вокруг коленчатого вала и повернуты на 120 градусов друг относительно друга, или четыре камеры могут быть размещены вокруг коленчатого вала и повернуты на 90 градусов друг относительно друга.
В отличие от традиционных роторных или поршневых двигателей обращенный асимметричный роторный двигатель может иметь рабочий объем, который увеличивается во время такта расширения по-другому, отлично от того, как он может быть уменьшен во время такта сжатия. Изменения рабочего объема могут быть связаны с изменениями радиуса, когда профиль с вогнутой формой перемещается вокруг камеры с изменением длины плеча механического кривошипа. В соответствии с различными вариантами осуществления асимметрия двигателя может иметь место в результате перемещения коленчатого вала со смещением от центра, что приводит к асимметричному движению профиля с вогнутой формой вокруг внутренней стенки камеры во время четырех тактов. Асимметрия может быть результатом изменения формы одного или более из следующих элементов: внутренней стенки камеры, наружной стенки камеры или профиля с вогнутой формой - для создания асимметрии той величины, на которую рабочий объем изменяется в каждом такте.
Специалисты-практики в данной области техники смогут увидеть другие варианты осуществления, отличные от тех, которые были конкретно описаны здесь. Предусмотрено, что охватываются все варианты осуществления в пределах объема притязаний и содержания формулы изобретения, включая эквивалентные способы, устройства и средства. Объем изобретения определен далее в приложенной формуле изобретения.
Изобретение относится к двигателям внутреннего сгорания. Роторный двигатель содержит один или более подвижных профилей с по существу вогнутой формой и неподвижную выпуклую поверхность эллиптической формы. Подвижные профили ограничены в перемещении вокруг неподвижной выпуклой поверхности для образования рабочего объема между ними. Роторный двигатель содержит камеру, ограниченную наружной стенкой камеры, задней стенкой камеры и внутренней стенкой камеры, окружающей обособленную часть. Камера имеет впускное отверстие, выпускное отверстие и отверстие для зажигания. Профиль с вогнутой формой выполнен с возможностью перемещения внутри камеры и способен взаимодействовать с возможностью скольжения с одной или более из наружной стенки камеры и внутренней стенки камеры. Палец кривошипа расположен на профиле с вогнутой формой. Кривошипный диск способен принимать палец кривошипа и приводиться им в движение. Коленчатый вал расположен так, что он проходит через обособленную часть, и соединен с кривошипным диском. Торцевая пластина, профиль с вогнутой формой, задняя стенка камеры и внутренняя стенка камеры образуют камеру с рабочим объемом. Способ создания непрерывно действующего крутящего момента в такте расширения роторного двигателя включает в себя образование рабочего объема и перемещение профиля с по существу вогнутой формой вокруг неподвижной выпуклой внутренней стенки камеры путем плавного смещения профиля вдоль наружной стенки камеры. Техническим результатом является увеличение крутящего момента и мощности на единицу рабочего объема двигателя. 3 н. и 31 з.п. ф-лы, 20 ил.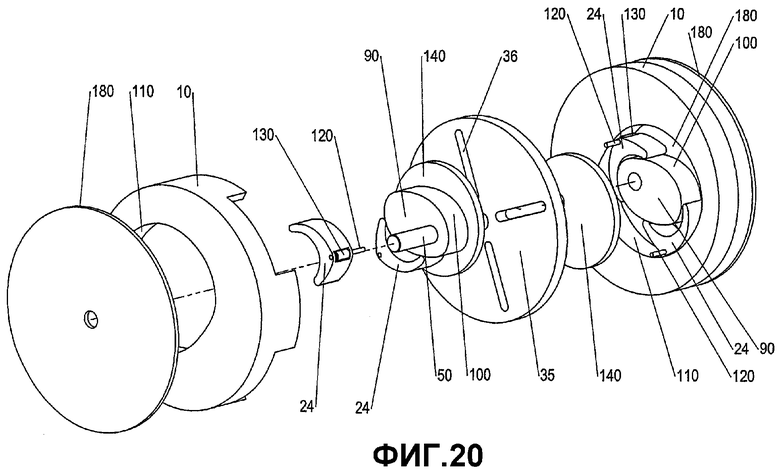
1. Роторный двигатель, содержащий один или более подвижных профилей с, по существу, вогнутой формой и неподвижную выпуклую поверхность эллиптической формы, в котором подвижные профили с, по существу, вогнутой формой ограничены в перемещении вокруг неподвижной выпуклой поверхности для образования рабочего объема между ними.
2. Двигатель по п.1, в котором неподвижная выпуклая поверхность содержит профиль, представимый в полярных координатах как R+(2·R sin(D/2)/(К·cos(D/2)+sin(D/2)), где К - коэффициент пересчета - постоянная величина, которая составляет от 0,27 до 4,0; R - длина радиуса и D - угол поворота радиуса вокруг оси поворота.
3. Двигатель по п.2, в котором К составляет 1,0.
4. Двигатель по п.1, в котором рабочий объем способен изменяться по мере того, как подвижные профили с, по существу, вогнутой формой перемещаются вокруг неподвижной выпуклой поверхности.
5. Двигатель по п.4, в котором изменение рабочего объема может соответствовать такту впуска двигателя, такту сжатия, такту расширения или такту выпуска.
6. Двигатель по п.4, в котором рабочий объем может различаться между двумя или более тактами: тактом впуска двигателя, тактом сжатия, тактом расширения и тактом выпуска.
7. Двигатель по п.4, в котором рабочий объем способен увеличиваться по мере того, как подвижные профили с, по существу, вогнутой формой перемещаются от места, имеющего меньший радиус кривизны на неподвижной выпуклой поверхности, к месту, имеющему больший радиус кривизны на неподвижной выпуклой поверхности.
8. Роторный двигатель, содержащий:
камеру, ограниченную наружной стенкой камеры, задней стенкой камеры и внутренней стенкой камеры, окружающей обособленную часть, причем камера имеет впускное отверстие, выпускное отверстие и отверстие для зажигания;
профиль с вогнутой формой, выполненный с возможностью перемещения внутри камеры и способный взаимодействовать с возможностью скольжения с одной или более из наружной стенки камеры и внутренней стенки камеры;
палец кривошипа, расположенный на профиле с вогнутой формой;
кривошипный диск, способный принимать палец кривошипа и приводиться им в движение;
коленчатый вал, расположенный так, что он проходит через обособленную часть, и соединенный с кривошипным диском; и
торцевую пластину,
причем торцевая пластина, профиль с вогнутой формой, задняя стенка камеры и внутренняя стенка камеры образуют камеру с рабочим объемом, включающую в себя рабочий объем.
9. Двигатель по п.8, в котором профиль с вогнутой формой взаимодействует с возможностью скольжения с наружной стенкой камеры посредством удерживающего элемента.
10. Двигатель по п.9, в котором удерживающий элемент представляет собой роликовую опору.
11. Двигатель по п.8, в котором рабочий объем способен увеличиваться по мере того, как профиль с вогнутой формой перемещается от места, имеющего меньший радиус кривизны на внутренней стенке камеры, к месту, имеющему больший радиус кривизны на внутренней стенке камеры.
12. Двигатель по п.8, в котором форма внутренней стенки камеры
содержит профиль, представимый в полярных координатах как
R+(2·R sin(D/2)/(К·cos(D/2)+sin(D/2)),
где К - постоянная, составляющая от 0,27 до 4,0, R - длина радиуса и D - угол поворота радиуса вокруг оси поворота.
13. Двигатель по п.12, в котором внутренняя кривая профиля с вогнутой формой зависит от профиля внутренней стенки камеры.
14. Двигатель по п.8, в котором коленчатый вал расположен асимметрично внутри обособленной части.
15. Двигатель по п.8, в котором расстояние от коленчатого вала до пальца кривошипа может изменяться в течение всего цикла двигателя.
16. Двигатель по п.8, в котором расстояние от коленчатого вала до пальца кривошипа может непрерывно увеличиваться во время такта расширения.
17. Двигатель по п.8, в котором расстояние от коленчатого вала до пальца кривошипа может непрерывно уменьшаться во время такта сжатия.
18. Двигатель по п.8, в котором каждый цикл двигателя содержит подциклы впуска, сжатия, расширения и выпуска, и каждый из подциклов соответствует величине поворота профиля с вогнутой формой вокруг внутренней стенки камеры, измеренной в градусах.
19. Двигатель по п.18, в котором величина поворота, по меньшей мере, для одного подцикла отличается от величины поворота для, по меньшей мере, одного другого подцикла.
20. Двигатель по п.18, в котором рабочий объем, по меньшей мере, в одном подцикле отличается от рабочего объема в, по меньшей мере, двух других подциклах.
21. Двигатель по п.8, в котором угол наклона между направлением создающей крутящий момент силы, действующей со стороны профиля с вогнутой формой, и касательной к наружной стенке камеры находится в интервале между нулем и 90° во время такта расширения.
22. Двигатель по п.21, в котором угол наклона может изменяться по мере перемещения профиля с вогнутой формой вокруг внутренней стенки камеры.
23. Двигатель по п.21, в котором угол наклона составляет от приблизительно 15° до приблизительно 75°.
24. Двигатель по п.21, в котором угол наклона составляет от приблизительно 30° до приблизительно 60°.
25. Двигатель по п.21, в котором угол наклона составляет 45°.
26. Двигатель по п.8, дополнительно содержащий второй профиль с вогнутой формой, выполненный с возможностью перемещения внутри камеры и способный взаимодействовать с возможностью скольжения с наружной стенкой камеры и внутренней стенкой камеры.
27. Двигатель по п.26, в котором второй профиль с вогнутой формой расположен приблизительно на 180° вокруг коленчатого вала от профиля с вогнутой формой в камере.
28. Двигатель по п.8, имеющий вторую камеру, повернутую на 180° вокруг коленчатого вала от камеры.
29. Двигатель по п.8, в котором камера с рабочим объемом способна перемещаться внутри двигателя.
30. Двигатель по п.29, в котором перемещение камеры с рабочим объемом осуществляется вокруг коленчатого вала.
31. Двигатель по п.8, в котором внутренняя стенка камеры имеет асимметричную форму.
32. Способ создания непрерывно действующего крутящего момента в такте расширения роторного двигателя, включающий в себя:
образование рабочего объема между неподвижной выпуклой внутренней стенкой камеры, задней стенкой камеры, подвижным профилем с, по существу, вогнутой формой и торцевой пластиной; и
перемещение профиля с, по существу, вогнутой формой вокруг неподвижной выпуклой внутренней стенки камеры путем плавного смещения профиля с, по существу, вогнутой формой вдоль наружной стенки камеры.
33. Способ по п.32, в котором угол наклона между направлением создающей крутящий момент силы, действующей со стороны профиля с, по существу, вогнутой формой, и касательной к наружной стенке камеры находится в интервале между нулем и 90°.
34. Способ по п.32, в котором угол наклона составляет от приблизительно 15° до приблизительно 75°.
35. Способ по п.32, в котором угол наклона составляет от приблизительно 30° до приблизительно 60°.
| US 3636930 A, 25.01.1972 | |||
| US 3981645 A, 21.09.1976 | |||
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1995 |
|
RU2105173C1 |
| JP 61210228 A, 18.09.1986 | |||
| РОТОРНО-ПОРШНЕВАЯ МАШИНА (ВАРИАНТЫ) И УПЛОТНЕНИЕ ПОРШНЯ РОТОРНО-ПОРШНЕВОЙ МАШИНЫ | 1997 |
|
RU2146009C1 |
| US 6009847 А, 04.01.2000. | |||

