Настоящее изобретение связано с исследованием объекта, в частности для исследования смещения на или в поверхности. Это изобретение применимо к любой поверхности, такой как часть станка, продукта, например металлический лист (для обнаружения трещин), или поверхность, которая подвергается вибрации, к примеру, оконное стекло. Изобретение также применимо, в частности, к перемещению земной поверхности, такой как океанское дно, для сейсмической разведки.
Изобретение использует когерентный свет, такой как у лазеров, и интерферометр для исследования смещений во времени или с течением времени. Такие методы предложены в совместно рассматриваемых заявке на патент Великобритании №0402914.6 и международной заявке WO 04/003589 заявителей по данной заявке, которые обе относятся к сейсмической разведке. Настоящее же изобретение имеет более общее применение.
В более ранних случаях методы включали в себя тщательное отслеживание быстрых интерферометрических сигналов, чтобы точно вычислять смещения объекта. Требовались высокие частоты дискретизации, и смещения находили после интегрирования большого числа отдельных последовательных записей. В настоящей заявке система не отслеживает быстрые интерферометрические сигналы, но реально отслеживает медленные сигналы в системе. Это значительно упрощает конструкцию системы и требует менее дорогостоящие компоненты.
Согласно изобретению обеспечивается способ исследования поверхности с помощью интерферометра, в котором имеется относительное перемещение между поверхностью и интерферометром, причем это перемещение имеет полную скорость Vtot, которая включает в себя поперечную или пересекающую составляющую Vt и продольную составляющую V1, содержащий шаги, на которых: направляют объектный пучок когерентного света на измеряемое место на поверхности, посредством чего имеется относительное перемещение между поверхностью и измеряемым местом; размещают детекторную матрицу на интерферометре на линии, проходящей в общем в поперечном направлении, причем детекторы размещаются для обнаружения световых лучей с различными угловыми направлениями, представляющими различные направления чувствительности; вырабатывают опорный пучок когерентного света, который по меньшей мере частично когерентен с объектным пучком; объединяют опорный пучок с отраженным объектным пучком от поверхности, чтобы получить перекрестную интерференцию в спекл-структуре, предоставляющую информацию об относительном перемещении поверхности и интерферометра; обнаруживают с помощью детекторов спекл-структуру и структуру перекрестной интерференции; находят, какой детектор в матрице имеет нулевую или минимальную чувствительность к полной скорости Vtot перемещения, тем самым идентифицируя детектор с линией направления чувствительности, которая перпендикулярна к Vtot; наблюдают изменение во времени того, какой из детекторов имеет нулевую или минимальную чувствительность, тем самым устанавливая изменение в направлении Vtot с течением времени, обусловленное изменениями в V1; и находят временные изменения в V1.
Предпочтительно, чтобы объектный пучок и опорный пучок испускались из интерферометра. Интерферометр может перемещаться постоянно в поперечном направлении, а поверхность может перемещаться прерывисто, относительно, в направлении, которое может быть иным, нежели поперечное направление.
Изобретение распространяется также на устройство для осуществления способа по изобретению и на отчет, получаемый при осуществлении способа по изобретению.
Изобретение может осуществляться на практике различными путями, и некоторые варианты осуществления будут теперь описаны посредством примера со ссылкой на сопровождающие чертежи, на которых:
Фиг.1 представляет собой условный вид, показывающий общие принципы изобретения;
Фиг.2 является графическим представлением одного тракта принятых сигналов, которые могут возникать вдоль линейки детекторов;
Фиг.3 является видоизмененной формой кривой, показанной на фиг.2;
Фиг.4 является видом, подобным фиг.1, показывающим изобретение, примененное к обнаружению сейсмических сигналов на морском дне;
Фиг.5 показывает использование оптических элементов для видоизменения системы;
Фиг.6 показывает альтернативный вариант осуществления;
Фиг.7 показывает конкретнее линию чувствительности для детектора;
Фиг.8 показывает конкретнее обнаружение сейсмических сигналов на морском дне;
фиг.9 показывает две альтернативных конфигурации объектива для использования в изобретении;
Фиг.10 показывает использование фазовой модуляции опорного пучка для компенсации перемещения интерферометра; и
Фиг.11 показывает применение изобретения к трехмерным измерениям.
На фиг.1 лазерный пучок расширяется для освещения объекта исследования (ОИ) (OUI) вдоль линии, как показано на фиг.1. ОИ может быть морским дном или иными объектами, наподобие поверхности вращающейся части станка.
Между измеряемым местом, которое может быть точкой, но здесь представляет собой линию на поверхности ОИ, и интерферометром (оптической головкой) имеется относительное перемещение. Это относительное перемещение имеет поперечную составляющую Vt скорости, как показано на фиг.1, а также продольную составляющую V1 скорости. В ситуации реального измерения это может быть ОИ, который перемещается, или это может быть интерферометр, который перемещается, или они оба. Для простоты это перемещение описывается, как если бы это был ОИ, который только и перемещается. Предполагается, что составляющие скорости одни и те же или приблизительно одни и те же для всех точек вдоль лазерной линии на объекте. Лазерная линия будет обычно иметь ограниченную длину (от миллиметра до метра), либо в конкретных применениях она может протягиваться на большие расстояния.
Прежде всего изобретение используется для обнаружения изменений во времени (уровней переменной составляющей) продольной составляющей V1 скорости. В зависимости от направления лазерных пучков и направлений колебаний (волн) ОИ, V1 может иметь составляющую, направленную как из плоскости, так и в поверхность ОИ. ОИ может быть плоской или искривленной поверхностью.
Линейка детекторных элементов размещается в основном в том же самом направлении, что и поперечная составляющая Vt скорости, как показано на фиг.1. Каждый детекторный элемент может быть также заменен детекторной матрицей или поперечной линией детекторов, что позволяет производить усреднение по нескольким детекторным элементам для каждого места на линии детекторов на фиг.1. Альтернативно может использоваться целая полная детекторная матрица. Детекторные элементы или детекторные матрицы также освещаются одним или несколькими опорными пучками, которые по меньшей мере частично когерентны с объектным пучком, отраженным от ОИ (на фиг.1 опорные пучки не показаны). Перед линейкой детекторов имеется формирующая изображение линза или линзовая система, либо иная формирующая изображение оптика, например искривленные зеркала. Эта формирующая изображение оптика формирует на линейке детекторов изображение лазерной линии на ОИ.
Вместо лазерной линии на поверхности объекта может иметь место сканирующая лазерная точка, которая сканирует вдоль такой же линии на объекте. Можно также освещать целое поле на поверхности объекта, предпочтительно, если используется полная полевая детекторная матрица, так что изображение освещенной части объекта формируется на эту детекторную матрицу.
Лазерный пучок, который освещает ОИ, может быть также сходящимся или расходящимся с фокусом на разных расстояниях от источника, в том числе в точках под или за ОИ. Но предпочтительно, лазерный источник для освещения объекта располагается в апертуре объектива на фиг.1 или рядом с этой апертурой. Это означает, что направления освещения и наблюдения параллельны. Лазерные пучки могут наводиться под различными угловыми направлениями к ОИ.
Изменения в продольной составляющей V1 означают, что направление полной скорости Vtot будет изменяться. В данном изобретении обнаруживаются изменения во времени в направлении Vtot, а следовательно, изменения во времени в продольной составляющей V1 скорости.
Каждый детекторный элемент в интерферометре, расположенный в конкретном месте вдоль линейки детекторов или в детекторной матрице, имеет свое собственное конкретное направление чувствительности. Линия SDL (ЛНЧ) на фиг.1 представляет линию или направление, подобное этому. Интерферометр и лазерный пучок располагаются и размещаются под угловыми направлениями так, чтобы по меньшей мере один детектор или группа детекторов имели линию SDL направления чувствительности, которая перпендикулярна к скорости Vtot. Если полная полевая детекторная матрица используется вместе с полным полевым освещением объекта, то имеется линейка детекторов поперек матрицы, которые все имеют направление чувствительности, перпендикулярное к скорости Vtot.
Детекторный элемент с линией SDL чувствительности, которая перпендикулярна к скорости Vtot, не будет иметь чувствительности к скорости Vtot. Все остальные детекторные элементы с иными направлениями чувствительности будут воспринимать меньшую или большую часть скорости Vtot.
Каждый детекторный элемент в интерферометре обнаруживает интерференцию между объектным светом и опорным светом, и интенсивность на детекторном элементе задается уравнением:

где I - полная интенсивность света на детекторном элементе,
Iопорн - интенсивность опорного света,
Iобъект - интенсивность объектного света,
µ - коэффициент между 0 и 1, зависящий от когерентности света и т.п.,
αразн - начальная разность оптических фаз между объектным и опорным светом,
αсмещ - дополнительная разность оптических фаз вследствие смещений объекта.
Уравнение (1) можно также записать в виде:

где Iфон - уровень фона,
Iмод - уровень модуляции.
Когда имеется перемещение со скоростью Vtot, как показано на фиг.1, фаза αсмещ для заданного детекторного элемента будет изменяться с фазовой скоростью ω, зависящей от угла между линией SDL направления чувствительности для этого детекторного элемента и направления скорости Vtot. Если этот угол равен или очень близок к 90° для конкретного детекторного элемента, то фаза αсмещ для этого детекторного элемента не будет изменяться, либо будет изменяться очень мало или очень медленно. Для остальных детекторных элементов с иными направлениями чувствительности фаза αсмещ будет изменяться, и αсмещ будет изменяться быстрее по мере того, как линия SDL отклоняется все более и более от 90° к направлению скорости Vtot.
Как видно из уравнения (2), интенсивность I на детекторе будет иметь синусоидальную модуляцию, когда фаза αсмещ изменяется во времени. Это означает, что детекторы с направлением (SDL) чувствительности 90° или близко к 90° к направлению скорости Vtot будут иметь интенсивности, которые модулируются медленно по сравнению с детекторами с иными направлениями чувствительности. В дальнейшем детекторы с направлением SDL чувствительности 90° к скорости Vtot называются детекторами нуля. Как правило, детектор(-ы) нуля изменяют положение все время, так что разные детекторы вдоль линейки детекторов или в детекторной матрице будут идентифицироваться в качестве детекторов нуля по мере изменения времени.
Основной принцип данного изобретения состоит в обнаружении и определении местоположения детекторов нуля, т.е. в определении местоположений детекторов с относительно медленными изменениями по интенсивности I. Это, к примеру, можно сделать одним из следующих путей.
1. Путем взятия отсчетов от детекторов или детекторных матриц с быстрыми частотами дискретизации и вычисления разности в сигнале от предыдущих отсчетов. Пусть электрический или цифровой сигнал от детектора называется S, тогда:
 ,
,
где S - это сигнал от детектора (электрический или цифровой),
К - постоянная,
t - время,
I - интенсивность на детекторе.
Теперь при рассмотрении временной частоты сигнала S оказывается, что детектор(-ы) с самой низкой частотой сигнала S представляет детектор(-ы) нуля.
2. За счет использования детекторов с относительно медленной частотой дискретизации и относительно длительным временем экспозиции на отсчет. В этом случае, детекторы с флюктуацией интенсивности более быстрой, нежели детектор может разрешить по времени, не дадут никакой или дадут относительно низкую флюктуацию сигнала S (низкую амплитуду), поскольку флюктуации интенсивности будут усредняться. Иными словами, сигнал S не может следовать за быстрой модуляцией интенсивности I. Фиг.2 показывает пример того, как может выглядеть сигнал вдоль линейки детекторов. Частота сигнала S возрастает с возрастанием расстояния от детектора нуля в то же самое время, когда сигнал S уменьшается по амплитуде в соответствии с синусоидальной функцией, как показано на фиг.2. Уравнение (3) не действует для данного способа, за исключением тех детекторных элементов, которые находятся вблизи детектора нуля, т.к. флюктуации интенсивности для этих детекторов будут достаточно медленными для детекторов для разрешения. Детектор нуля можно определить и установить его местоположение как пространственной фильтрацией вдоль линейки детекторов (см. фиг.2), так и анализом временных флюктуации.
3. Способом, который объединяет вышеупомянутые способы, где анализируются как временные частоты детекторов, так и амплитуды сигналов.
Объектный свет, отраженный от ОИ, будет в общем иметь спекл-структуру из-за неровности поверхности ОИ и высоких когерентных свойств лазерного света. Это также видно из фиг.2. Когда интерферометр перемещается относительно ОИ или наоборот, спеклы будут в общем случае декоррелированы в пространстве в результате этого перемещения, и как Iобьект, так и αразн в уравнении (2) будет изменяться во времени. Эти случайные изменения дадут флюктуации интенсивности, как видно из уравнения, но эти случайные флюктуации интенсивности будут, как правило, более медленными, чем изменения интенсивности вследствие относительного перемещения объекта Vtot, по меньшей мере для детекторов, удаленных от детекторов нуля. Упомянутые выше флюктуации интенсивности можно использовать для получения эффектов усреднения, что ведет к более гладкой кривой интенсивности (см. фиг.3), если нужно также фильтровать и выпрямлять сигнал. Эффекты усреднения можно получить как усреднением сигналов от нескольких соседних детекторных элементов или детекторных матриц, так и усреднением во временной области. Эффект усреднения или сглаживания может облегчить обнаружение и определение точного местоположения детекторов нуля. Если кривая на фиг.3 дискретизируется в нескольких или многих точках вдоль линии детекторов, то можно использовать алгоритм для вычисления «центра тяжести» (= детектора нуля). Скорость декоррелирования Iобъект и αразн зависит от формы, размера и фокуса лазерного пучка (см. предшествующий патент).
Фиг.4 показывает условно, как работает изобретение для обнаружения сейсмических сигналов на морском дне. Интерферометр перемещается вдоль пунктирной линии, и полная (относительная) скорость точки измерения, которая перемещается по морскому дну, изменяется между вектором VtotA и вектором VtotB на этом чертеже, пока имеется установившийся сейсмический сигнал с единственной частотой и амплитудой, как показано на чертеже. Детектор нуля будет проходить между положениями А и В на линии детекторов. Если поперечная скорость Vt составляет 1 м/с, а амплитуда сейсмических колебаний составляет 100 нм на 50 Гц, то амплитуда продольной скорости будет 31,4 мкм/с, а направление полной скорости Vtot будет меняться в пределах +/-0,0018 градусов. Когда интерферометр расположен в 5 м над морским дном и длина лазерной линии на ОИ равна 0,3 м, а длина детекторной матрицы составляет 50 мм, тогда расстояние между положениями А и В на линии детекторов будет приблизительно 26 мкм, что составляет, как правило, расстояние в 4 пиксела при размере пиксела 7 мкм.
Пример записи алгоритма для обнаружения детектора нуля может быть следующим.
1. Получают сигнал Si(t) от всех детекторных элементов i вдоль линии детекторов с заданной частотой дискретизации (t= время).
2. Вычисляют изменение сигнала Si(t) во времени ∂Si(t)/∂t для всех пикселов.
3. Суммируют ∂Si(t)/∂t и усредняют по некоторому времени для всех пикселов, и может быть также усредняют по нескольким соседним пикселам. Некоторые из этих соседних пикселов могут располагаться в поперечном направлении, как указано на фиг.8.
4. Выполняют пространственную фильтрацию вдоль линии детекторов, чтобы найти положение детектора(-ов) нуля.
Могут использоваться и иные алгоритмы, когда временная оценка сигнала S вдоль линии детекторов используется для определения местоположения детектора(-ов) нуля.
Изобретение может также использовать одномерные «воспринимающие местоположение детекторы», чтобы обеспечить разрешение малых изменений в перемещениях интенсивности (малые перемещения детекторов нуля). Воспринимающий местоположение детектор может базироваться на методах связи и корреляции между несколькими соседними детекторными элементами, и тем самым чувствительность можно увеличить.
Чтобы сформировать изображение лазерной линии в 30 см на объекте на линейку детекторов длиной 50 мм на расстоянии 5 м, можно использовать фокусное расстояние приблизительно 0,7 м. Оптическое расстояние между объективом и линейкой детекторов будет относительно большим, но можно использовать зеркала или другие оптические элементы, чтобы получить световой тракт в виде ломаной линии с меньшими общими размерами, см. фиг.5.
Чувствительность системы можно также увеличить или уменьшить с помощью различных объективов или линзовых систем, либо других формирующих изображение элементов перед детекторами. Можно также использовать искривленные зеркала. Можно объединять системы с 2 или более линейками детекторов, расположенными бок о бок, где одна система может иметь различные линзовые системы перед детекторами, тогда как другие линейки детекторов имеют отличную линзовую или формирующую изображение систему. При этом одна система детекторов может иметь высокую чувствительность, тогда как другая система имеет более низкую чувствительность, но больший динамический диапазон по отношению к сейсмическим амплитудам и по отношению к несовпадению всего направления интерферометра и лазерного пучка с направлением скорости Vtot. На практике, объективы или формирующие изображение элементы могут быть длинными в одном направлении и узкими в другом поперечном направлении.
Если между формирующей изображение системой и детекторами либо на наружной стороне формирующей изображение системы установлены зеркала, то линии направления чувствительности для детекторных элементов будут регулироваться путем наклона одного или нескольких из этих зеркал, как указано на фиг.5. Если интерферометр перемещается в наклонном положении, которое изменяется во времени, то может потребоваться соответственно регулировать направления чувствительности.
Линейка детекторов или детекторные матрицы, либо воспринимающие положение детекторы могут быть короткими или длинными, они могут быть от нескольких микрометров до нескольких метров, если (предпочтительно) используются несколько лазерных пучков и формирующих изображение систем.
Если используются две или несколько параллельных линий детекторов с разной чувствительностью, то наименее чувствительная линейная система детекторов (с наивысшим динамическим диапазоном) может использоваться для регулировки направления чувствительности для остальных линеек детекторов с более высокой чувствительностью, так что они могут найти их соответствующие детекторы нуля и работать в своем ограниченном динамическом диапазоне.
Изобретение может также использовать динамическое управление направлениями чувствительности с помощью динамического управления ранее упоминавшимися зеркалами. Управление зеркалами осуществляется посредством сигналов обратной связи от одной или нескольких параллельных линеек детекторов, как описано выше, так что положение детектора нуля поддерживается более или менее постоянно на линии детекторов, если используются одна или несколько линий детекторов. При этом управляющие сигналы обратной связи дадут информацию о сейсмическом сигнале.
Измерение сейсмических сигналов может длиться несколько секунд, начиная с относительно высоких сейсмических амплитуд, а затем по мере уменьшения амплитуд. Динамический диапазон и чувствительность данного изобретения могут регулироваться и изменяться в течение периода измерения. Это можно делать с помощью двух или более параллельных линеек детекторов, либо изменением или регулировкой оптических элементов перед линейкой детекторов.
Другая конструкция по изобретению показана на фиг.6.
В этом случае, лазерный пучок направлен к объекту исследования (ОИ) для освещения единственной точки на поверхности (точка измерения на фиг.6). Лазерный пучок может сходиться или расходиться с фокусом на разных расстояниях от источника, в том числе в точках под или за ОИ. Пучок может также иметь различные формы (круглую, прямоугольную и т.п.), и пучок может также фокусироваться в линию под поверхностью вместо точки.
Линейка детекторных элементов размещается в основном в том же самом направлении, что и поперечная составляющая Vt, как показано на фиг.6. Как и ранее, каждый детекторный элемент можно заменить детекторной матрицей. Детекторные элементы или детекторные матрицы также освещаются одним или несколькими опорными пучками, которые, по меньшей мере частично, когерентны с объектным светом, отраженным от ОИ (опорные пучки не показаны на фиг.6). Свет, отраженный от точки измерений на ОИ, может также отражаться зеркалами или направляться иными элементами либо иными средствами, так что линейка детекторов или детекторная матрица может физически располагаться и геометрически размещаться иначе, нежели показано на фиг.6.
На фиг.6 показана плоскость нуля. Это плоскость в пространстве, которая проходит через точку измерений и которая перпендикулярна вектору скорости Vtot. Как и ранее, каждый детекторный элемент, расположенный в конкретном местоположении вдоль линейки детекторов, имеет свое собственное направление чувствительности. Линия SDL на фиг.6 представляет линию или направление, подобное этому.
Интерферометр и лазерный пучок располагаются и размещаются под угловыми направлениями так, чтобы по меньшей мере один детектор или детекторная матрица на линии детекторов имели линию SDL направления чувствительности, которая параллельна плоскости нуля и действительно расположена в ней. При размещении, показанном на фиг.6, направление чувствительности для детекторного элемента не является линией, которая проходит из точки измерения (лазерное пятно на ОИ) и к детекторному элементу. Направление чувствительности для детекторного элемента показано на фиг.7.
Детекторный элемент с линией SDL чувствительности в плоскости нуля не будет иметь чувствительности к скорости Vtot, но все прочие детекторные элементы с иными направлениями чувствительности будут воспринимать меньшую или большую часть скорости Vtot. Уравнение для интенсивности света то же самое для данной оптической конфигурации, что и для предшествующей конфигурации, так что уравнения (1) и (2) по-прежнему пригодны.
Фиг.8 условно показывает, как изобретение работает для обнаружения сейсмических сигналов на морском дне. Общая (относительная) скорость точки измерения, которая перемещается по морскому дну, изменяется между вектором VtotA и вектором VtotB на этом чертеже, пока имеется установившийся сейсмический сигнал с единственной частотой и амплитудой, как показано на чертеже. Детектор нуля будет проходить между положениями А и В на линии детекторов. Если поперечная скорость Vt составляет 1 м/с, а амплитуда сейсмических колебаний составляет 100 нм на 50 Гц, то амплитуда продольной скорости будет 31,4 мкм/с, а направление полной скорости Vtot будет меняться в пределах +/-0,0018 градусов. Когда интерферометр расположен в 5 м над морским дном, тогда расстояние между положениями А и В на линии детекторов будет приблизительно 314 мкм, что составляет, как правило, расстояние в 40 пикселов при размере пиксела 7 мкм.
С этой оптической конфигурацией также можно использовать «воспринимающие местоположение детекторы», чтобы обеспечить разрешение малых изменений в перемещениях интенсивности (малые перемещения детекторов нуля). Основное различие между этой конфигурацией и первой конфигурацией состоит в том, что не используется никакая формирующая изображение оптика, и что линейка детекторных элементов будет, как правило, длиннее.
Однако чувствительность в этой второй конфигурации может также увеличиваться или уменьшаться с помощью отрицательных (рассеивающих) или положительных (собирающих) объективов или линзовых систем, либо иных формирующих изображение элементов перед детекторами, как показано на фиг.9. Можно также использовать искривленные зеркала. Можно объединять системы с 2 или более линейками детекторов, расположенными бок о бок, где одна система может иметь различные линзовые системы (либо не иметь линз) перед детекторами, тогда как другие линейки детекторов имеют отличную линзовую или формирующую изображение систему.
Как и ранее, линейка детекторов или детекторные матрицы либо воспринимающие местоположение детекторы могут быть короче или длиннее; они могут быть от нескольких микрометров до нескольких метров или даже непрерывными вдоль расстояний в несколько сотен метров, если (предпочтительно) используется несколько лазерных пучков. Если длина детекторной линии ограничена, положение детектора нуля может заканчиваться вне линии детекторных матриц, так что никакой детекторный элемент не становится детектором нуля. В этом случае, направление лазерного пучка может регулироваться до тех пор, пока положение детектора нуля не попадет в диапазон (длину) линии детекторных элементов. Помимо этого, если свет, приходящий к линейке детекторов, отражается зеркалами перед тем, как достичь детекторов, эти зеркала могут наклоняться, чтобы получить должное направление чувствительности для системы.
Для этой второй конфигурации возможно динамическое управление лазерным пучком, где управление пучком осуществляется сигналами обратной связи из одной или нескольких линеек детекторов, как описано выше, так что положение детектора нуля поддерживается более или менее постоянно на линии детекторов, если используются одна или несколько линий детекторов. Как и ранее, управляющий сигнал обратной связи даст информацию о сейсмическом сигнале. Лазерный пучок предпочтительно управляется только в одном направлении, по существу в том же самом направлении, что и скорость Vtot, которое опять-таки является, как правило, тем же самым направлением или примерно тем же самым направлением, что и линейка детекторов.
Обычно, в отличие от системы, описанной ранее со ссылкой на фиг.1, система по фиг.6 будет иметь более высокую чувствительность, но меньший динамический диапазон с увеличением расстояния до ОИ. Расстояние до ОИ может быть найдено системой с помощью данных S от линейки детекторов, т.к. площадь детектора нуля будет шире при увеличении расстояния.
Недостаток второй конфигурации по сравнению с первой состоит в том, что изменения в расстоянии между интерферометром и ОИ могут давать ложные сигналы вдоль детекторной линии. Эти ложные сигналы могут быть малыми, но если система устроена для того, чтобы разрешать очень малые амплитуды, этот источник ошибок может оказаться ограничивающим фактором.
Фазовая модуляция
Если лазерный пучок и направления чувствительности системы (как в первой, так и во второй конфигурациях) воспринимают большую часть перемещения интерферометра или ОИ, то фазовая модуляция опорного пучка может использоваться для компенсации этого, см. фиг.10. Это описывается в упомянутой выше заявке на патент Великобритании №0402914.6.
Если относительно большая часть перемещения воспринимается системой, это значит, что скорость V1 становится большой, так что V1 может иметь большую постоянную составляющую («DC») при малой переменной составляющей («АС») сверх нее. Большую постоянную составляющую в V1 можно удалить с помощью фазовой модуляции опорного пучка. Фазовая модуляция на деле означает, что кривая на фиг.3 перемещается вбок (влево или вправо) на детекторной линии. По-другому это выражается тем, что изгиб между линей нуля или плоскостью нуля и полной скоростью Vtot становится отличной от 90 градусов, когда используется фазовая модуляция опорного пучка.
Если, например, лазерный пучок направлен под углом вперед или назад относительно направления распространения для интерферометра (со ссылкой на фиг.4 и фиг.8), то скорость V1 получит меньший или больший постоянный уровень. В этом случае фазовую модуляцию можно использовать для компенсации этого.
С помощью фазовой модуляции на систему накладывается «синтетическая» продольная скорость. Если моделировать синусоидально меняющуюся скорость V1 с заданными амплитудой и частотой, и если найти соответствующую «амплитуду» детектора нуля вдоль детекторной линии на этой же частоте, тогда можно реально вычислить поперечную скорость Vt из этих данных.
Трехмерное измерение
Изобретение можно использовать для измерения пространственных трехмерных смещений, если используются, к примеру, три отдельных блока наподобие показанного на фиг.1 и (или) на фиг.6. Фиг.11 показывает пример этого, где сейсмические сигналы в морском дне измеряются в трех измерениях. Каждый из лазерных пучков на этом чертеже может быть лазерным пучком или лазерной линией, как описано ранее. При размещении, показанном на фиг.11, фазовая модуляция потребовалась бы в блоке, смотрящем вперед в направлениях скорости.
Предполагается, что длина волны в колебаниях (волнах) ОИ больше, чем расстояние между позициями на ОИ, на которые падают линии чувствительности в лазерном пучке.
Если имеется большее число систем, подобных показанной на фиг.11, перемещающихся в большом массиве систем, можно осуществлять измерения по большим площадям морского дна. Можно также комбинировать системы, когда свет, отраженный от одной и той же линии освещения или точки освещения, может восприниматься разными соседними детекторными системами, чтобы получить измерения с разных направлений чувствительности.
Изобретение относится к способу исследования смещений на или в поверхности с помощью интерферометра для сейсмической разведки. Заявленное устройство конструктивно реализуется с учетом выполняемых действий заявленного способа. При этом при реализации заявленного способа измеряют скорость перемещения слоев поверхности в направлении нормали к указанной поверхности и вдоль указанной поверхности. Для обнаружения указанных перемещений используют интерференцию, полученную от опорного луча и луча, отраженного от поверхности. Регистрациию максимумов и минимумов указанной интерференции производят при помощи матрицы детекторов. Технический результат: упрощение реализации способа и конструкции устройства. 2 н. и 13 з.п. ф-лы, 11 ил.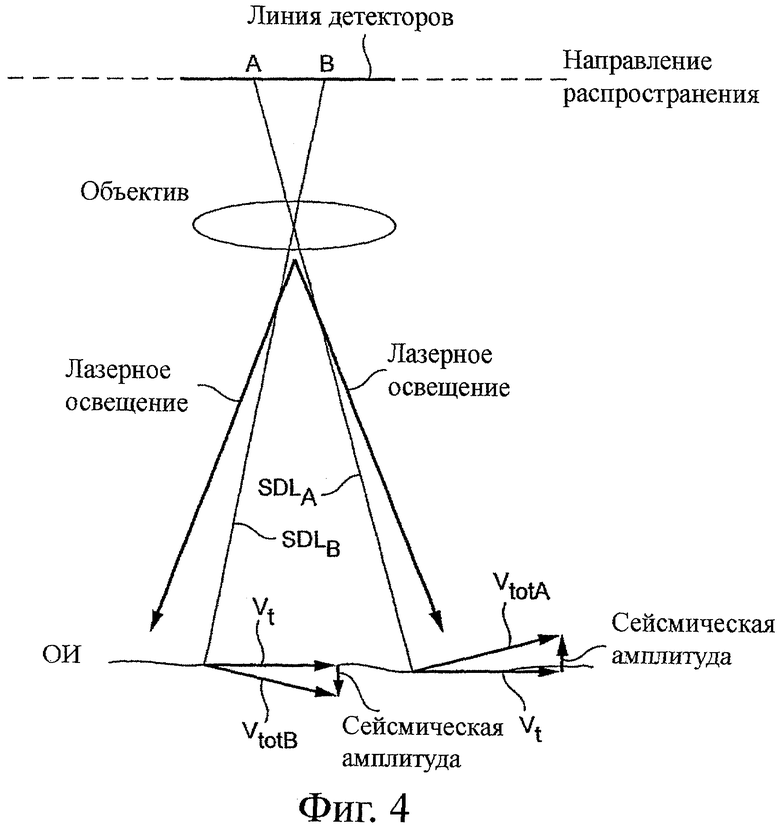
1. Способ исследования поверхности с помощью интерферометра, в котором имеется относительное перемещение между поверхностью и интерферометром, причем это перемещение имеет полную скорость Vtot, которая включает в себя поперечную или пересекающую составляющую Vt и продольную составляющую V1, содержащий шаги, на которых: направляют объектный пучок когерентного света на измеряемое место на поверхности; размещают детекторную матрицу на интерферометре на линии, проходящей в общем в поперечном направлении, причем детекторы размещаются для обнаружения световых лучей с различными угловыми направлениями, представляющими различные направления чувствительности; вырабатывают опорный пучок когерентного света, который, по меньшей мере, частично когерентен с объектным пучком; объединяют опорный пучок с отраженным объектным пучком от поверхности, чтобы получить перекрестную интерференцию в спекл-структуре, предоставляющую информацию об относительном перемещении поверхности и интерферометра; обнаруживают с помощью детекторов спекл-структуру и структуру перекрестной интерференции; находят, какой детектор в матрице имеет нулевую или минимальную чувствительность к полной скорости Vtot перемещения, тем самым идентифицируя детектор с линией направления чувствительности, которая перпендикулярна к Vtot; наблюдают изменение во времени в том из детекторов, который имеет нулевую или минимальную чувствительность, тем самым устанавливая изменение в направлении Vtot с течением времени, обусловленное изменениями в V1; и находят временные изменения в V1.
2. Способ по п.1, в котором объектный пучок и опорный пучок испускаются из интерферометра.
3. Способ по п.1 или 2, в котором интерферометр перемещается постоянно в поперечном направлении, а поверхность перемещается прерывисто, относительно, в направлении ином, нежели поперечное направление.
4. Способ по п.1, в котором когерентные световые пучки являются лазерными пучками.
5. Способ по п.4, в котором объектный пучок расширяют, чтобы осветить объект исследования.
6. Способ по п.1, в котором измеряемое положение является точкой или линией на поверхности объекта исследования.
7. Способ по п.1, в котором каждый детектор в матрице состоит из линейки детекторов, проходящей в общем параллельно или в общем под прямым углом к поперечному направлению.
8. Способ по п.1, в котором световые пучки подвергают формированию изображения посредством формирующей изображение оптики непосредственно перед обнаружением детекторами.
9. Способ по п.8, в котором формирующая изображение оптика содержит линзовую систему или искривленные зеркала.
10. Способ по п.1, в котором объектом исследования является морское дно или вращающаяся часть станка.
11. Интерферометр для исследования поверхности, где имеется относительное перемещение между поверхностью и интерферометром, причем это перемещение имеет полную скорость Vtot, которая включает в себя поперечную или пересекающую составляющую Vt и продольную составляющую V1, содержащий: источник объектного пучка когерентного света, выполненный с возможностью направления этого объектного пучка на измеряемое место на поверхности; матрицу детекторов на интерферометре на линии, проходящей, в общем, в поперечном направлении, причем детекторы размещаются для обнаружения световых лучей с различными угловыми направлениями, представляющими различные направления чувствительности; источник опорного пучка когерентного света, выполненный с возможностью вырабатывать опорный пучок, который, по меньшей мере, частично когерентен с объектным пучком, при этом источник опорного пучка выполнен с возможностью объединения опорного пучка с отраженным объектным пучком от поверхности, чтобы получить перекрестную интерференцию в спекл-структуре, предоставляющую информацию об относительном перемещении поверхности и интерферометра, при этом детекторы выполнены с возможностью обнаруживать спекл-структуру и структуру перекрестной интерференции; средство для нахождения, какой детектор в матрице имеет нулевую или минимальную чувствительность к полной скорости Vtot перемещения, тем самым идентифицируя детектор с линией направления чувствительности, которая перпендикулярна к Vtot; средство для наблюдения изменения во времени в том детекторе, который имеет нулевую или минимальную чувствительность, тем самым устанавливая изменение в направлении Vtot с течением времени, обусловленное изменениями в V1; и средство для нахождения временных изменений в V1.
12. Интерферометр по п.11, в котором каждый детекторный элемент содержит линейку отдельных детекторов.
13. Интерферометр по п.12, в котором эта линейка параллельна или поперечна к указанному поперечному направлению.
14. Интерферометр по п.11, включающий в себя формирующую изображение оптику перед линейкой детекторов.
15. Интерферометр по п.14, в котором формирующая изображение оптика содержит формирующий изображение объектив, линзовую систему или искривленные зеркала.
| ИЗМЕРИТЕЛЬ ИНФРАНИЗКИХ СЕЙСМОВОЛН | 1998 |
|
RU2152628C1 |
| US 5777741 A, 07.07.1998 | |||
| Коробка передач | 1987 |
|
SU1497072A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

