Уровень техники
Предыдущие способы получения местоположений с помощью глобальной системы позиционирования (A-GPS) показали ухудшенную эффективность в сетях, которые используют повторители, чтобы обеспечить улучшенную зону обслуживания телефонной службы в сети. Обычно в способе, который использует разность времени поступления (TDOA, РВП), чтобы вычислять местоположение подвижной станции (MS, ПС), расстояние между подвижной станцией и базовой приемопередающей станцией/башней (BTS, БПС) может быть определено, если даны скорость света и времена передачи/приема сигнала между БПС и ПС. БПС содержит в себе радиоприемопередатчики, которые определяют соту (ячейку) и координируют протоколы линии радиосвязи с мобильной ПС. Ячейка определяет географическую область и обычно разделена на секторы. Сектор относится к ячейке, которая разделяет свою зону обслуживания на несколько разделов. Число поддерживаемых секторов является переменным, но обычно их бывает три. Однако имеются 1 и 6 ячеек секторов и, возможно, даже 2, 4 и 5 ячеек секторов, определенных радиоприемопередатчиками, которые содержит в себе БПС. Обычно требуются, по меньшей мере, три башни, чтобы определять местоположение ПС. Мультилатерация является термином, применяемым к способу определения местоположения ПС, передающей сигнал в более чем одну принимающую башню. Мультилатерация прямой линии связи является названием, применяемым к способу A-GPS, в котором ПС принимает сигналы из передающих башен, чтобы определять местоположение. Синхронизация является критичной для любого способа мультилатерации, так как ошибка только в микросекунду в синхронизации тактового генератора (например, между принимающими/передающими башнями) может давать в результате ошибку в определении местоположения ПС приблизительно 984 фута. До сих пор другие способы определения местоположения ПС с помощью сети неточно определяли источники сигналов, принятых подвижной станцией. Так как эти определения источников сигналов обычно не анализируют большое количество возможных источников сигналов, ошибка в определении источника является вероятной. Эта ошибка распространяется на определение местоположения подвижной станции, поскольку ошибка при идентификации источников сигналов, насколько можно ожидать, приводит к ошибке в определении местоположения подвижной станции.
Краткое описание чертежей
Фиг.1 - схема, иллюстрирующая подвижную станцию, например, мобильный телефон или другое персональное устройство связи, и ряд приемопередающих станций/башен базовых станций на координатной сетке.
Фиг.2 - таблица, иллюстрирующая полезную информацию, содержащуюся в справочнике, содержащем данные о задержках для множества приемопередающих станций базовых станций.
Фиг.3 иллюстрирует чертеж блок-схемы подвижной станции.
Фиг.4 иллюстрирует блок-схему системы в соответствии с одним аспектом предпочтительного варианта осуществления изобретения.
Фиг.5 - схема, иллюстрирующая подвижную станцию, например, мобильный телефон или другое персональное устройство связи, и ряд приемопередающих станций/башен базовых станций на координатной сетке.
Ссылочные номера указаны ниже по тексту.
Подробное описание предпочтительных вариантов осуществления
Предоставлены система, способ и устройство, предназначенные для определения местоположения подвижной станции с использованием методологии мультилатерации с помощью сети. В соответствии с одним вариантом осуществления подготавливают справочник, который содержит информацию о дальности расстояний от приемопередающих станций базовых станций (башен ячеек) в области, картографированной в соответствии с организационной структурой, такой как координатная сетка. Следует заметить, что "координатная сетка", как использованная в настоящем описании, необязательно должна иметь части, которые являются прямоугольными или даже одинаковыми в размере. Информацию о дальности расстояний запоминают в справочнике в виде данных о задержках сигналов. Измеряемая задержка сигнала может быть задержкой пилот-сигнала. Это особенно полезно для систем множественного доступа с кодовым разделением (CDMA, МДКР). Например, в системе МДКР каждый приемопередатчик базовой станции (БПС), т.е. базовая станция или узел ячейки, передает псевдошумовой (PN, ПШ) код, имеющий уникальную кодовую последовательность, которую подвижное устройство, такое как мобильный телефон, может различать в пилот-сигнале БПС в канале пилот-сигнала прямой линии связи (связь из БПС в подвижную станцию). Пилот-сигнал постоянно передают по каналу пилот-сигнала, для того чтобы подвижное устройство обнаружило систему.
Следует заметить, что дальность источника передачи до приемника может быть определена из задержки сигнала, определенной с помощью фазы сигнала в приемнике.
Фиг.1 - схема, иллюстрирующая подвижную станцию 2 (например, мобильный телефон, персональный цифровой ассистент с функциональными возможностями беспроводной связи, портативный компьютер с функциональными возможностями беспроводной связи, пейджер или другое персональное устройство связи) и ряд приемопередающих станций/башен 4 базовых станций на координатной сетке 6. В одном аспекте изобретения подвижная станция 2 принимает сигналы от множества источников, включая башни 4. Делается проверка гипотезы: а именно, сигналы, принятые подвижной станцией 2, поступают из данного множества башен, например, трех башен.
При условии, что разность фазы будет иметься между передачами сигналов из отдельных местоположений, неодинаково удаленных от приемника, и что сигналы многолучевого распространения (многомаршрутные сигналы), получаемые в результате отражений и отклонений от конструкций, таких как здания и т.д., могут быть отличены от прямых передач из башен 4, вычисления задержек сигналов из гипотетического множества башен на основании разностей фаз сигналов могут быть определены в подвижной станции 2, или соответствующие данные могут быть переданы из подвижной станции в компьютер 8 сети связи для дистанционного вычисления.
После того, как определены задержки передач сигналов из гипотетического множества башен, эти данные передают в компьютер 8 сети связи, который служит в качестве компаратора для сравнения их с данными о задержках сигналов из наборов из трех передающих башен, найденными в справочнике 10. Более конкретно, сравнение делают между фактическими задержками и задержками, перечисленными в справочнике 10 для наборов множеств передающих башен. Все комбинации башен, в одной или более сетях, с заданным размером множества могут быть использованы в связи с определением данных задержек сигналов, чтобы заполнить справочник 10.
Данные справочника 10 могут поступать предпочтительно с помощью вычисления на основании известных местоположений БПС. В качестве альтернативы, хотя менее желательно, чем вычисление, эти данные могут быть собраны с помощью измерений по области. В этом отношении транспортное средство, оборудованное механизмом мониторинга сигналов, предоставляет данные справочника в связи с проведением исследования данных сигналов, включая информацию о задержках сигналов из БПС, по некоторой области, идентифицируя БПС посредством сигнатуры пилот-сигнала.
Фиг.2 - таблица, иллюстрирующая полезную информацию, содержащуюся в справочнике фиг.1. Справочник 10 может перечислять множество башен, его определение и задержку приема, связанную с каждым членом множества башен. Например, как изображено на фиг.2, множество башен TG1 может быть определено как башни А, В и С. Отмечены задержки, связанные с каждой башней. Следовательно, задержка 2 мкс изображена для башни А, задержка 2,4 мкс изображена для башни В и задержка 4 мкс изображена для башни С.
Сравнение измеренных данных и данных справочника проводят посредством определения корреляции между измеренными данными и данными справочника. Корреляцию между измеренными данными и данными справочника определяют в связи с назначением оценки вероятности для широковещательной передачи из каждого множества (или более вероятно, комбинации) башен и соответствующими фактическими задержками сигналов, измеренными на основании проверки гипотезы. Все башни и комбинации башен не должны рассматриваться при сравнении данных справочника и данных фактических задержек. Выбор башен, рассматриваемых при сравнении, может происходить в результате рассмотрения интенсивности пилот-сигнала, исходящего из БПС, и т.д. Например, только совокупности БПС, имеющие, по меньшей мере, один узел БПС в множестве с интенсивностью пилот-сигнала выше заданного порогового уровня, должны рассматриваться при сравнении.
Оценка вероятности может быть назначена с помощью компьютера 8 сети фиг.1. Задержки сигналов будут обнаружены с помощью разности фазы между псевдослучайными шумовыми кодовыми последовательностями, принятыми подвижной станцией из передающих башен. С достаточным основанием можно допустить, что оценка вероятности может быть определена с использованием распределения Гаусса, так как в соответствии с центральной теоремой предела большая группа независимых ошибок дает полную ошибку, которая является гауссовой. Оценка вероятности может быть основана на числе стандартных отклонений от среднего значения. Следует заметить, что, если фактические задержки сигналов точно соответствуют гипотетическим задержкам, связанным с множеством передающих башен, оценка вероятности для этого множества передающих башен равна 1. Следовательно, с большой достоверностью можно сказать, что конкретное множество передающих башен являются башнями, подлежащими использованию при определении местоположения подвижной станции в связи с использованием способа мультилатерации. Кривая распределения Гаусса наложена на схему фиг.1. Местоположение подвижной станции 2 в па вдоль оси абсцисс, например, могла бы означать корреляцию собранных данных с данными справочника. Следует заметить, что компьютер сети, выполняющий определения задержек принятых сигналов, не должен быть тем же самым компьютером, который выполняет сравнение справочника. Оценки вероятности могут быть запомнены в базе данных, предпочтительно временной базе данных, для выбора оценки вероятности наивысшей корреляции с данными справочника, представляющими множество базовых станций, с помощью устройства, которое функционально служит в качестве устройства выбора. Еще раз, компьютер 8 фиг.1 может выполнять функции устройства выбора.
Когда оценка вероятности наивысшей корреляции выбрана, т.е. выбор наиболее вероятного множества передающих башен, определяют местополеожение подвижной станции с использованием мультилатерации, при допущении широковещательной передачи вблизи множества наиболее вероятных башен с использованием способа РВП из множества наиболее вероятных башен. В случае, когда оценка вероятности ограничивается, процесс определения местоположения запускают повторно, начиная со сбора данных о задержках сигналов с помощью подвижной станции. Этот процесс повторяют до тех пор, пока не появится одна оценка вероятности, представляющая одно множество башен наивысшей корреляции с собранными данными. Местоположение подвижной станции в одном аспекте изобретения предпочтительно указывают в терминах данных долготы и широты. Однако эти данные могут быть дополнительно преобразованы в данные, указывающие точку на карте города, атласа и т.д. Вышеупомянутый способ относится к мультилатерации прямой линии связи, так как подвижная станция 2 принимает сигналы, переданные из башен 4, в связи с выполнением определений местоположения.
Фиг.3 иллюстрирует чертеж блок-схемы подвижной станции, которая включает в себя дисплей 2, соединенный с радиочастотной (RF, РЧ) секцией 7 и процессором 8. Вычисления задержек сигналов могут быть выполнены в процессоре 8 в связи с выполнением программного обеспечения 9, которое может выполнять вычисления задержек сигналов. РЧ секция 7 обеспечивает линию связи через антенну 12 в сеть связи. Результаты определения местоположения могут быть изображены на дисплее 3 в виде данных широты и долготы. Кроме того, процессор 8 посредством памяти 11 может обеспечить преобразование данных широты и долготы в данные местоположения (карта улиц, атлас и т.д.) для индикации на дисплее 3.
Фиг.4 иллюстрирует блок-схему системы в соответствии с одним аспектом предпочтительного варианта осуществления изобретения. Как изображено, данные справочника 10, содержащие информацию о задержках сигналов для множеств БПС, сравнивают с данными 12 измеренных задержек с помощью компаратора 14. Сравнения, выполненные с помощью компаратора 14, запоминают в базе 16 данных в виде оценки вероятности. Устройство 18 выбора выбирает множество БПС с помощью идентификации наилучшей оценки, соответствующей множеству БПС, которые представляют ближайшее множество источников передачи БПС к подвижной станции (не изображена). Аппаратура 20 мультилатерации определяет местоположение подвижной станции на основании множества БПС, выбранных с помощью устройства 18 выбора. Местоположения, определенные с помощью аппаратуры 20 мулльтилатерации, могут быть переданы в подвижную станцию или в другие местоположения, например, диспетчер 911, диспетчер парка автомобилей и т.д.
В другом предпочтительном варианте осуществления местоположение подвижной станции может быть оценено с использованием меньше чем трех БПС. Когда используют три или более башен, чтобы определить местоположение подвижной станции, говорят, что система переопределена. Следовательно, можно получить более точное решение определения местоположения, так как большие дальности передачи приписаны большему числу башен. Это дает возможность лучшего определения положения подвижной станции и лучшего определения того, какие башни являются наиболее вероятными источниками сигналов в подвижную станцию 2. Однако две БПС могут быть использованы, чтобы получить местоположение относительно дальности между каждой из этих двух БПС и подвижной станцией. Со ссылкой на фиг.5, которая является схемой, иллюстрирующей подвижную станцию 2 и ряд приемопередающих станций/башен 4 базовых станций на координатной сетке 6, две башни 4 выбраны в качестве источника сигналов в подвижную станцию. Эти башни ограничены окружностями 50 и 52, которые указывают зоны обслуживания башен в соответствии с данным ограничением дальности передачи от башни. Справочник 10 фиг.2 может содержать информацию, относящуюся к множеству башен, определенному парами БПС. Информацию о задержках сигналов, содержащуюся в справочнике 10 для каждого множества башен, сравнивают с данными измеренных задержек, принятых с помощью подвижной станции 2. Сравнения преобразуют в оценку вероятности, которая отслеживает корреляцию измеренной задержки сигнала с задержкой, найденной в справочнике 10. Идентифицируют множество БПС с помощью наилучшей оценки, соответствующей множеству БПС, которые представляют ближайшее множество источников передачи БПС до подвижной станции. Зная зону обслуживания БПС, наиболее вероятное местоположение подвижной станции может быть выбрано вдоль линии 54, определенной с помощью двух точек пересечения окружностей 50 и 52 в пределах данных ограничений дальностей передачи башен.
В любых из вышеупомянутых вариантов осуществления изобретения при определении местоположения могут быть учтены данные определения местоположения за прошлое время. Если подвижная станция 2 имеет местоположение, указанное в точке А области 6 координатной сетки, тогда в связи с предварительно определенным количеством времени, которое прошло с предыдущего определения местоположения, оценке вероятности для башен вблизи предыдущего местоположения назначают более высокий весовой коэффициент. Это имеет место, так как в зависимости от способа перемещения, например, моторное транспортное средство, пешком и т.д., изменения местоположения могут быть ограничены. В качестве варианта, назначение весовых коэффициентов может зависеть конкретно от способа перемещения, использованного в связи с подвижной станцией. Например, если способ перемещения реализуется с помощью моторного транспортного средства, скорость изменения местоположения, вероятно, будет значительно большей, чем скорость изменения местоположения, связанная со способом перемещения пешком.
Несмотря на то, что в настоящей заявке изобретение описано со ссылкой на конкретные варианты осуществления, следует понимать, что эти варианты осуществления только иллюстрируют принципы и приложения настоящего изобретения. Например, вышеупомянутое изобретение может быть реализовано не только в системах МДКР, но также в системах множественного доступа с разделением по времени (TDMA, МДРВ), или в системах множественного доступа с частотным разделением (FDMA, МДЧР), или в системах множественного доступа с пространственно-временным уплотнением каналов (SDMA, МДПВУК). Поэтому следует понимать, что многочисленные модификации могут быть применены к иллюстративным вариантам осуществления и что могут быть реализованы другие устройства, не выходя за рамки сущности и объема настоящего изобретения, как определено с помощью прилагаемой формулы изобретения.
Изобретение относится к системе, способу и устройству определения местоположения (МС) подвижной станции (ПС) с использованием мультилатерации. Технический результат заключается в повышении точности определения МС ПС. Система содержит справочник, включающий в себя информацию о задержках сигналов данных передачи для картографированной области из множеств базовых станций (БС) до выбранных МС на упомянутой картографированной области, причем информация о задержках сигналов данных передачи содержит разность времени между передачей сигнала от БС и поступлением сигнала на выбранные МС; компаратор, выполненный с возможностью сравнения данных справочника для выбранных множеств БС с данными измеренных задержек сигналов, собранными с помощью упомянутой ПС, причем упомянутый компаратор дополнительно выполнен с возможностью назначения оценки вероятности для каждого выбранного множества БС, соответствующих упомянутым данным измеренных задержек сигналов, причем указанные выбранные множества БС определены на основании пилот-сигнала, принятого на указанной ПС; устройство выбора множества БС, выполненное с возможностью выбора одного множества БС из выбранных множеств БС наиболее характерных сигналов для упомянутой ПС, на основании упомянутой оценки вероятности; и аппаратуру мультилатерации, выполненную с возможностью определения МС для упомянутой ПС на основании БС, выбранных с помощью упомянутого устройства выбора множества БС, и измеренных данных задержек сигналов, собранных с помощью упомянутой ПС для выбранного множества БС. 4 н. и 18 з.п. ф-лы, 5 ил.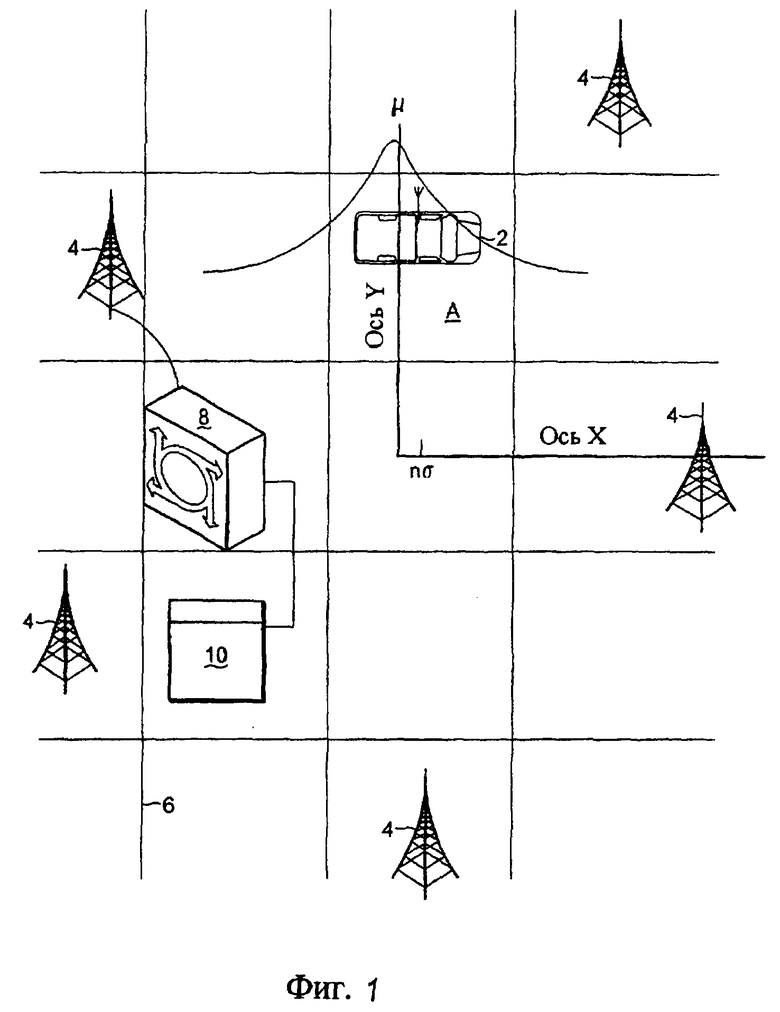
1. Система, предназначенная для определения местоположения подвижной станции, содержащая:
справочник, включающий в себя информацию о задержках сигналов данных передачи для картографированной области из множеств базовых станций до выбранных местоположений на упомянутой картографированной области, причем информация о задержках сигналов данных передачи содержит разность времени между передачей сигнала от базовой станции и поступлением сигнала на выбранные местоположения;
компаратор, выполненный с возможностью сравнения данных справочника для выбранных множеств базовых станций с данными измеренных задержек сигналов, собранными с помощью упомянутой подвижной станции, причем упомянутый компаратор дополнительно выполнен с возможностью назначения оценки вероятности для каждого выбранного множества базовых станций, соответствующих упомянутым данным измеренных задержек сигналов, причем указанные выбранные множества базовых станций определены на основании пилот-сигнала, принятого на указанной передвижной станции;
устройство выбора множества базовых станций, выполненное с возможностью выбора одного множества базовых станций из выбранных множеств базовых станций наиболее характерных сигналов для упомянутой подвижной станции, на основании упомянутой оценки вероятности; и
аппаратуру мультилатерации, выполненную с возможностью определения местоположения для упомянутой подвижной станции на основании базовых станций, выбранных с помощью упомянутого устройства выбора множества базовых станций, и измеренных данных задержек сигналов, собранных с помощью упомянутой подвижной станции для выбранного множества базовых станций.
2. Система, предназначенная для определения местоположения подвижной станции по п.1, причем упомянутая система обеспечивает доступ к радиоканалу посредством способа, выбранного из группы схем доступа к радиоканалу, состоящей из множественного доступа с кодовым разделением каналов, множественного доступа с временным разделением каналов, множественного доступа с частотным разделением каналов, множественного доступа с пространственным разделением каналов (МДКР) или их комбинации.
3. Система, предназначенная для определения местоположения подвижной станции по п.1, в которой каждое множество базовых станций содержит три базовые станции.
4. Система, предназначенная для определения местоположения подвижной станции по п.1, в которой каждое множество базовых станций содержит две базовые станции.
5. Система по п.1, в которой упомянутую информацию о задержках сигналов данных передачи справочника генерируют на основании известных местоположений базовых станций.
6. Система по п.1, в которой упомянутая информация о задержках сигналов данных передачи справочника является следствием измерений, выполненных в связи с проведением исследований данных сигналов по некоторой области.
7. Система по п.1, в которой упомянутый компаратор является компьютером сети связи.
8. Система по п.1, в которой упомянутые выбранные множества базовых станций выбирают на основании интенсивности пилот-сигнала базовой станции.
9. Система по п.1, в которой упомянутую оценку вероятности определяют в терминах стандартного отклонения от среднего значения в связи с распределением Гаусса.
10. Система по п.1, которая дополнительно включает в себя базу данных для запоминания упомянутых оценок вероятности.
11. Система по п.1, в которой упомянутая подвижная станция является подвижным устройством связи, выбранным из группы, состоящей из мобильного телефона, персонального цифрового ассистента с функциональными возможностями беспроводной связи, портативного компьютера с функциональными возможностями беспроводной связи и пейджера.
12. Способ определения местоположения подвижной станции, содержащий этапы, на которых:
собирают данные о задержках сигналов из местоположения упомянутой подвижной станции, причем данные о задержках сигналов содержат разность времени между передачей сигнала от базовой станции и поступлением сигнала на местоположение;
сравнивают упомянутые собранные данные о задержках сигналов с выбранными данными о задержках сигналов из справочника, причем упомянутые данные о задержках сигналов справочника представляют информацию о задержках сигналов, относящуюся к предварительно определенным множествам узлов базовых станций;
назначают оценку вероятности для упомянутых выбранных данных о задержках сигналов справочника на основании статистической корреляции между упомянутыми собранными данными и упомянутыми выбранными данными о задержках сигналов справочника;
выбирают из указанного предварительно определенного множества одну базовую станцию с оценкой вероятности, указывающей на наибольшую корреляцию с упомянутыми собранными данными;
определяют местоположение упомянутой подвижной станции в соответствии со способом мультилатерации с использованием данных передающих базовых станций из упомянутого одного из предварительно определенного множества базовых станций и собранных данных о задержках сигналов для выбранного набора базовых станций.
13. Способ определения местоположения подвижной станции по п.12, в котором упомянутые данные справочника генерируют на основании известных местоположений базовых станций.
14. Способ определения местоположения подвижной станции по п.13, в котором упомянутые данные справочника являются следствием измерений, выполненных в связи с проведением исследований данных сигналов по некоторой области.
15. Способ определения местоположения подвижной станции по п.13, в котором каждое предварительно определенное множество узлов базовых станций содержит три узла базовых станций.
16. Способ определения местоположения подвижной станции по п.12, в котором упомянутые предварительно определенные множества базовых станций выбирают на основании интенсивности пилот-сигнала базовой станции, измеренной указанной подвижной станцией.
17. Способ определения местоположения подвижной станции по п.12, в котором упомянутая подвижная станция является подвижным устройством связи, выбранным из группы, состоящей из мобильного телефона, персонального цифрового ассистента с функциональными возможностями беспроводной связи, портативного компьютера с функциональными возможностями беспроводной связи и пейджера.
18. Подвижная станция, содержащая:
дисплей;
антенну;
радиочастотную секцию, предназначенную для обеспечения линии связи в сеть связи через упомянутую антенну; и
процессор, запрограммированный с возможностью выполнения вычисления задержек сигналов в связи с данными, принятыми из упомянутой сети связи и с возможностью предоставления вывода данных на упомянутый дисплей, которые включают в себя местоположение передвижной станции, которое определено в соответствии со способом мультилатерации с использованием данных о задержках сигналов для множества базовых станций, выбранного из нескольких множеств базовых станций, основываясь на оценке вероятности, которая указывает на данные о задержках сигнала, относящиеся к выбранному множеству базовых станций, причем данные о задержках сигнала содержат разность времени между передачей сигналов от базовой станции и поступлением сигналов на выбранные местоположения.
19. Подвижная станция по п.18, в которой упомянутая подвижная станция является подвижным устройством связи, выбранным из группы, состоящей из мобильного телефона, персонального цифрового ассистента с функциональными возможностями беспроводной связи, портативного компьютера с функциональными возможностями беспроводной связи и пейджера.
20. Устройство для определения местоположения подвижной станции, содержащее:
средство для сбора данных о задержках сигналов из местоположения упомянутой подвижной станции, причем данные о задержках сигналов содержат разность времени между передачей сигнала от базовой станции и поступлением сигнала на местоположение;
средство для сравнения упомянутых собранных данных о задержках сигналов с выбранными данными о задержках сигналов справочника из справочника, причем упомянутые данные о задержках сигналов справочника представляют информацию о задержках сигналов, относящуюся к предварительно определенным множествам узлов базовых станций;
средство для назначения оценки вероятности для упомянутых выбранных данных о задержках сигналов справочника на основании статистической корреляции между упомянутыми собранными данными и упомянутыми выбранными данными о задержках сигналов справочника;
средство для выбора из указанного предварительно определенного множества одну базовую станцию с оценкой вероятности, указывающей на наибольшую корреляцию с упомянутыми собранными данными;
средство для определения местоположения упомянутой подвижной станции в соответствии со способом мультилатерации с использованием данных передающих базовых станций из упомянутого одного из предварительно определенного множества базовых станций и собранных данных о задержках сигналов для выбранного набора базовых станций.
21. Устройство по п.20, в котором упомянутые предварительно определенные множества базовых станций выбирают на основании интенсивности пилот-сигнала базовой станции, измеренной с помощью указанной подвижной станции.
22. Устройство по п.20, в котором упомянутую оценку вероятности определяют в терминах стандартного отклонения от среднего значения в связи с распределением Гаусса.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СОТОВОГО ПОДВИЖНОГО ТЕРМИНАЛА | 1998 |
|
RU2216102C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОЙ СТАНЦИИ В СИСТЕМЕ ПОДВИЖНОЙ СВЯЗИ | 1999 |
|
RU2193286C2 |
| JP 20022186012, 28.06.2002 | |||
| Nagpal R., Shrobe H., Bachrach J | |||
| Organizing a Global Coordinate System from Local Information on an Ad Hoc Sensor Network | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

