Область техники, к которой относится изобретение.
Изобретение относится к летательным аппаратам тяжелее воздуха, вертикального взлета и посадки, преимущественно к легкомоторным, беспилотным.
Уровень техники.
Легкомоторные аппараты (ЛМА) предназначены для выполнения задач на незначительном удалении от интересующего объекта без обнаружения со стороны противника и для снабжения групп разведки важной тактической информацией в сценариях ведения боевых действий в городских условиях и горной местности. Малый размер ЛА необходим прежде всего для уменьшения суммарной стоимости системы по сравнению с крупногабаритными военными БЛА, а также для удобства переноса или транспортировки. Типовая боевая задача ЛМА состоит из полета до интересующего объекта на 25 км, со скоростью от 0 до 700 км/час, на высоте от “бреющего” до 3 км, облет зоны объекта в течение получаса и возвращения к месту первоначального базирования. ЛМА должен совершать тактические полеты в зоне турбулентных ветров до 45 км/ч, маневрировать рядом со строениями и в горной местности, и многократно набирать высоту для преодоления препятствий. ЛМА также должен быть пригодным для ведения видеоразведки с воздуха и удобен для развертывания с минимальными затратами времени на тренировочные занятия.
ЛМА должны иметь небольшие габаритные размеры и вес, работать в зонах сильных ветров и доставлять видеоизображения высокого качества. Конструкция этих самолетов должна быть основана на интегральной технологии, задачей которой является общая работа системы ЛМА.
Очертания крыла в плане влияет на лобовое сопротивление. При прочих равных условиях на малых скоростях полета эллипсовидное крыло является наивыгоднейшим, но в изготовлении оно сложнее. При дозвуковых скоростях аэродинамически выгодно иметь крылья с большими удлинениями, но у скоростных самолетов удлиненные крылья перестают давать преимущества.
Для ЛМА применяются различные приводы, чаще других электрические, для чего разрабатываются различные аккумуляторы, в т.ч. органические.
“Сейчас огромное количество зарубежных фирм и научных центров, главным образом в США, заняты разработкой и созданием супермаховичных двигателей, в том числе для авиации и космических целей. Супермаховичные двигатели делают из ленты и волокон, которые не дают при разрыве опасных осколков. По важнейшему показателю - удельной энергии - они уже сравнялись с лучшими электрохимическими аккумуляторами, а удельная мощность в сотни раз больше” /“Техника и наука”, 1982, №1/.
Пока в ЛМА редко применяются ракетные и реактивные двигатели.
Твердотопливные ракетные двигатели (РДТТ) характеризуются высокой надежностью (99,96-99,99%); возможностью длительного хранения, то есть постоянной готовностью к запуску; значительной тягой за счет очень короткого времени горения; безопасностью в обращении из-за отсутствия токсичных материалов; большой плотностью топлива (1,5-2 г/см2).
Недостатки РДТТ: большая масса конструкции из-за высоких давлений в камере сгорания; чувствительность большинства видов топлива к удару и изменениям температуры; неудобство транспортировки снаряженных РДТТ; малое время работы; трудности, связанные с регулированием вектора тяги; малый удельный импульс по сравнению с жидкостными ракетными двигателями.
Воздушно-реактивный двигатель (ВРД), в котором для сжигания горючего используется кислород, содержащийся в атмосферном воздухе. ВРД приводит в движение летательные аппараты (самолеты, вертолеты, самолеты-снаряды). Сила тяги в ВРД возникает в результате истечения рабочих газов из реактивного сопла. Для получения большой скорости истечения газов из сопла воздух, поступающий в камеру сгорания ВРД, подвергается сжатию. В зависимости от способа сжатия воздуха ВРД делятся на турбокомпрессорные (ТРД), пульсирующие (ПуВРД) и прямоточные (ПВРД).
В прямоточном ВРД (ПВРД) во входном диффузоре воздух сжимается за счет кинетической энергии набегающего потока воздуха. Процесс работы непрерывен, поэтому стартовая тяга у ПВРД отсутствует. При скоростях полета ниже половины скорости звука (ниже 500 км/ч) повышение давления воздуха в диффузоре незначительно, поэтому получаемая сила тяги мала. В связи с этим при скоростях полета, соответствующих М<0,5 (где М - число Маха), ПВРД не применяется; ПВРД могут работать как на химическом (керосин, бензин и др.), так и на атомном горючем. Основные преимущества ПВРД: способность работать на значительно больших скоростях и высотах полета, чем ТРД; большая экономичность по сравнению с жидкостными ракетными двигателями (ЖРД), отсутствие движущихся частей и простота конструкции. Главные недостатки ПВРД: отсутствие статической (стартовой) тяги, что требует принудительного старта; малая экономичность при дозвуковых скоростях полета / Лит.: Бондарюк М.М., Ильяшенко С.М. Прямоточные воздушно-реактивные двигатели, М., 1958/.
Известен летательный аппарат - аналог, наиболее близкий к предлагаемому изобретению, включающий адаптивное крыло, двигатели, центробежные компрессоры, механизмы, обеспечивающие возможность изменения вектора тяги и управления пограничным слоем (Патент РФ RU №2174484 С2, 1999, 7 В64С 29/00) [1].
Прямое использование аппарата [1] для беспилотного летательного аппарата, особенно маленького, легкомоторного, сдерживается следующими ограничениями: необходимостью существенного снижения шума в зоне интересующего объекта, при этом необходимо иметь высокую удельную мощность двигателя для облета и маневрирования в зоне турбулентных ветров до 45 км/ч, рядом со строениями и в горной местности, и многократно набирать высоту для преодоления препятствий.
Раскрытие изобретения.
Сущность изобретения в том, что Дисколет - летательный аппарат тяжелее воздуха, вертикального (короткого) взлета и посадки, преимущественно беспилотный, с адаптивным крылом и силовой установкой, включающей двигатели, центробежные компрессоры и механизмы для изменения вектора тяги и управления пограничным слоем, оборудован самобалансирующимся, дискообразным (вариант - эллипсовидным) летающим крылом, с координатами поверхности на линиях вращения, в виде окружностей, овалов, эллипсов и т.п., причем плоскость, в которой лежит линия вращения, перпендикулярна плоскости продольного профиля, а линия пересечения плоскостей совпадает с диаметром линии вращения так, что один конец диаметра расположен в носовой части аппарата, а другой на линии пересечения с контуром продольного профиля;
Силовая установка оборудована двигателем - твердотопливным ракетным (1 вариант), или воздушно-реактивным (2 вариант), преимущественно прямоточным, который интегрирован с центробежным компрессором и супермаховиком (1 вариант) или с центробежным компрессором и электромотором, моторгенератором, пневмоприводом (2, 3, 4 варианты), с возможностью раскрутки супермаховика от собственного или внешнего привода, а также от вакуума, который возникает в узкой части реактивного сопла при прохождении сквозь него потока рабочих газов.
Центробежный компрессор оснащен соплом с заслонками, которые обеспечивают возможность изменения вектора тяги с вертикального на поступательное, а управлению пограничным слоем способствуют щели в разрезном крыле в верхней части аппарата, используемые в качестве воздухозаборника указанного центробежного компрессора.
Кроме того, аппарат может оснащаться генератором электрического тока для обеспечения деятельности всех систем и летательного аппарата в целом, как функциональной составляющей авиационного комплекса.
Краткое описание чертежей.
На фиг.1 показан общий вид дисколета с твердотопливным ракетным микродвигателем (РДТТ). На фиг.2 показан общий вид дисколета с воздушно-реактивным двигателем (ПВРД). На фиг.3 показаны линии построения поверхностей дисколета. На фиг.4 показаны два варианта силовой установки: вариант 1 с супермаховиком, вариант 2 - с электрическим приводом центробежного компрессора. На фиг.5 - вид сбоку силовой установки с РДТТ (спиралеобразный корпус с воздухозаборником не показан). На фиг.6 - вид сбоку силовой установки с ПВРД, на фиг.7 - вид дисколета спереди, на фиг.8 - вид сбоку, на фиг.9 - вид сзади, на фиг.10 - дисколет с эллипсовидным крылом.
Обозначены на фиг.1-8: 1 - адаптивное самобалансирующееся дискообразное летающее крыло дисколета, 2 - линия вращения в виде окружности, эллипса, овала и т.п., 3 - плоскость, в которой лежит линия вращения, 4 - плоскость, в которой лежит продольный профиль 5, 6 - линия пересечения плоскостей, 7 - диаметр линии вращения, 8 - точка пересечения одного конца диаметра 7 с носовой частью крыла 1,9 - точка пересечения другого конца диаметра 7 линии вращения 3 с контуром продольного профиля 5, 10 - твердотопливный ракетный двигатель (фиг.1, 5) (1 вариант), 11 - воздушно реактивный двигатель (фиг.4, 6) (2 вариант), преимущественно прямоточный, 12 - центробежный компрессор (фиг.4), 13 - супермаховик (1 вариант) 14 - электромотор, мотор-генератор или пневмопривод (2, 3, 4 варианты), 15 - муфта внешнего привода, 16 - кольцо отбора вакуума, 17 - узкая часть реактивного сопла, 18 - трубка Вентури, 19 - сопло, 20 - заслонки, 21 - щели воздухозаборника (фиг.5, 6), 22 - разрезное крыло (фиг.5, 6), 23 - управляемое плоское сопло, совмещенное с элеронами, закрылками и рулем высоты (фиг.4, 5, 6), 24 - управляемое хвостовое оперение (фиг.5, 6), 25 - спутниковое или радионавигационное оборудование (фиг.4), 26 - кабина пилотов или специальное разведывательное оборудование, 27 - генератор электрического тока, 28 - топливный бак (в перспективе - гидридный, и водородные топливные элементы для электропривода).
Осуществление изобретения.
Адаптивное крыло выполнено в виде самобалансирующегося летающего крыла 1 с дискообразным (вариант - эллипсовидным) в плане очертанием, с координатами поверхности на линиях вращения 2, в виде окружностей, овалов, эллипсов и т.п., причем плоскость 3, в которой лежит линия вращения 2, перпендикулярна плоскости 4 продольного профиля 5, а линия пересечения плоскостей 6 совпадает с диаметром 7 линии вращения 2 так, что один конец диаметра расположен в носовой части аппарата 8, а другой 9 на линии пересечения с контуром продольного профиля 5.
Силовая установка оборудована двигателем - твердотопливным ракетным 10 (1 вариант), или воздушно-реактивным 11 (2 вариант), преимущественно прямоточным, который интегрирован с центробежным компрессором 12 и супермаховиком 13 (1 вариант) или с центробежным компрессором 12 и электромотором, мотор-генератором, пневмоприводом 14 (2, 3, 4 варианты), с возможностью раскрутки супермаховика 13 от собственного 14 или внешнего привода 15, а также путем интенсивного обдува через сопла канавок супермаховика 13 потоком воздуха, всасываемого в камеру супермаховика при образовании вакуума 16 в узкой части реактивного сопла 17, или трубки Вентури 18 (вариант с твердотопливным ракетным двигателем) при прохождении сквозь него потока рабочих газов.
Центробежный компрессор 12 оснащен соплом 19 с заслонками 20, которые обеспечивают возможность изменения вектора тяги с вертикального на поступательное, а управлению пограничным слоем способствуют щели 21 в разрезном крыле 22 в верхней части аппарата 1, используемые в качестве воздухозаборника указанного центробежного компрессора.
Органы управления аппаратом известные - плоское управляемое сопло 23, интегрированное с центробежным компрессором 12 и совмещенное с элеронами, закрылками и рулем высоты, обеспечивает возможность управления аппаратом по крену и тангажу. Аппарат можно оснащать хвостовым оперением 24, по которому также прокачивают поток воздуха от центробежных компрессоров, а также тормозными щитками и другим оборудованием.
Кроме того, аппарат может оснащаться спутниковым или радионавигационным 25, специальным разведывательным оборудованием 26, а также генератором электрического тока 27 с приводом от супермаховика 13 - для обеспечения деятельности всех систем и летательного аппарата в целом, как функциональной составляющей авиационного комплекса, а также топливным баком 28.
Конструкция аппарата в виде летающего крыла с круглым или эллипсовидным в плане очертанием с координатами поверхности на линиях вращения существенно упрощают производство дисколета, а интеграция ПВРД с центробежным компрессором обеспечивает повышенное давление воздуха в диффузоре ПВРД и дает возможность использования в дисколете этих легких, простых, экономичных двигателей и на старте, и на режиме полета к интересующему объекту.
Подготовка аппарата к полету заключается во вводе данных по маршруту полета, визуальном осмотре аппарата, выборе места запуска, установке обоймы из твердотопливных ракетных микродвигателей и включении зажигания или подачи топлива и включении зажигания реактивного двигателя или подачи тока на мотор-генератор.
Запуск легкомоторного беспилотного аппарата “с руки”.
При запуске аппарата с помощью твердотопливных ракетных микродвигателей 10 набор высоты совмещается с раскруткой супермаховика 13 от вакуума. Маневрирование на взлете и посадке лучше выполнять с помощью радиоуправления. Полет по заданному маршруту можно осуществлять по программе через спутниковые системы GPS или ГЛОНАСС.
При необходимости вертикального взлета и посадки “с поверхности” включают в работу механизм для изменения вектора тяги, которым оснащен центробежный компрессор 12 в виде сопла 19 с заслонками 20 (фиг.4).
Полет в интересующей зоне осуществляется с отключенным реактивным (ракетным) двигателем, при малом шуме, от супермаховика 13 и интегрированного с ним центробежного компрессора 12, или от центробежного компрессора 12 с электрическим или другим приводом 14.
Органом управления для маневрирования аппаратом по крену и тангажу служит управляемое плоское сопло 23. Оно же является реактивным соплом для поступательного движения аппарата.
При необходимости включают в работу управляемое хвостовое оперение 24 или другие известные органы управления.
Посадка “мягкая”, с помощью воздушной подушки, создаваемой потоком воздуха от центробежного компрессора 12 через сопло 19.
Аппарат обслуживается одним оператором и позволяет существенно снизить количество потерь среди военнослужащих.
Изобретение относится к летательным аппаратам тяжелее воздуха, вертикального взлета и посадки. Дисколет вертикального взлета и посадки выполнен с адаптивным крылом и силовой установкой, включающей двигатели и центробежные компрессоры, выполненные с возможностью изменения вектора тяги соответствующими механизмами и управления пограничным слоем. Адаптивное крыло выполнено с круглым или овальным в плане очертанием, с координатами поверхности на линиях второго порядка. Плоскость, в которой лежит каждая линия, перпендикулярна плоскости контура продольного профиля крыла, а пересечение линий расположено в носовой части дисколета. Силовая установка включает также воздушно-реактивный двигатель, который через устройство отбора мощности и воздуховод интегрирован с пневмоприводом центробежного компрессора, который оснащен мотор-генератором или супермаховиком и соплом с заслонками для изменения вектора тяги с вертикального на поступательное. Верхняя часть дисколета имеет в разрезном крыле щели, используемые в качестве воздухозаборников центробежных компрессоров и для управления пограничным слоем. Изобретение направлено на расширение арсенала технических средств. 10 ил.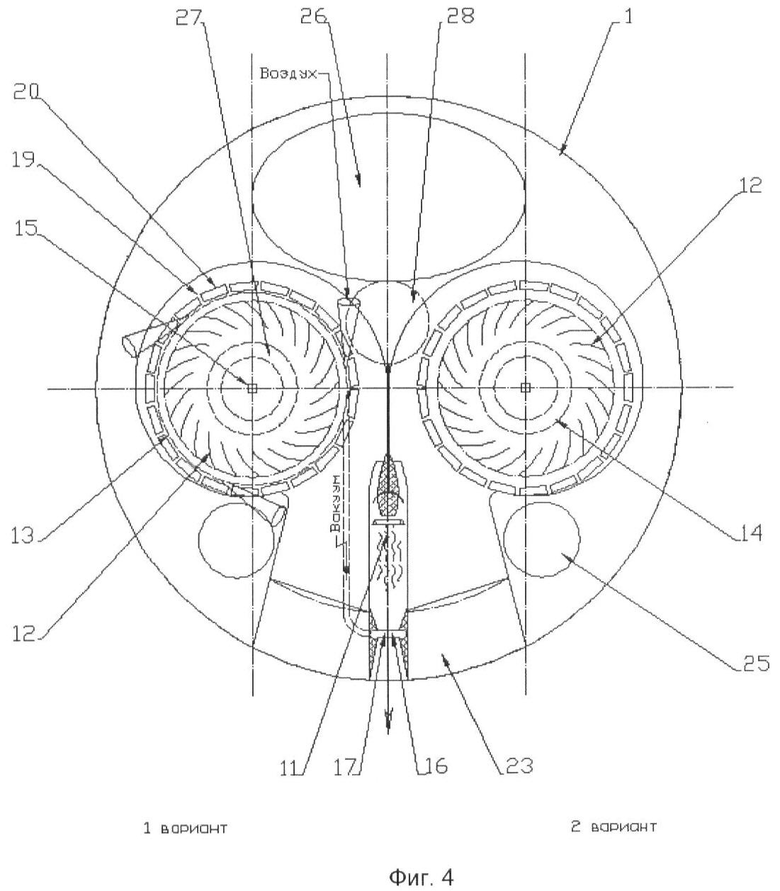
Дисколет вертикального взлета и посадки, преимущественно беспилотный, с адаптивным крылом и силовой установкой, включающей двигатели и центробежные компрессоры, выполненные с возможностью изменения вектора тяги соответствующими механизмами и управления пограничным слоем, отличающийся тем, что адаптивное крыло выполнено с круглым или овальным в плане очертанием, с координатами поверхности на линиях второго порядка, причем плоскость, в которой лежит каждая линия, перпендикулярна плоскости контура продольного профиля крыла, а пересечение линий расположено в носовой части дисколета, силовая установка включает воздушно-реактивный двигатель, который через устройство отбора мощности и воздуховод интегрирован с пневмоприводом центробежного компрессора, который оснащен мотор-генератором или супермаховиком и соплом с заслонками для изменения вектора тяги с вертикального на поступательное, при этом верхняя часть дисколета имеет в разрезном крыле щели, используемые в качестве воздухозаборников центробежных компрессоров и для управления пограничным слоем.
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ - "ДИСКОЛЕТ БЕЗРУКОВА-3" | 1999 |
|
RU2174484C2 |
| US 5836542 A, 17.11.1998 | |||
| US 3123320 А, 03.03.1964. | |||

