Изобретение относится к области автоматизированных систем инвентаризации электрооборудования, а именно к устройствам и методам обнаружения, идентификации, определения географического местоположения и пространственной ориентации опор линий электропередач, установленных вблизи автомобильных дорог.
Известна система для определения географических координат опор линий электропередач с одновременной фото- и видеосъемкой (патент США №7184072, H04N 7/18, опубл. 27.02.2007), содержащая установленные на самолет лазерный высотомер для идентификации опор; приемник сигналов спутниковых навигационных систем (СНС) для определения географических координат самолета; фото- и видеокамеры, позволяющие получить изображение опор.
Недостатками известной системы, обусловленными использованием для съемки самолета, являются высокая себестоимость работ и сложность определения диспетчерского номера опоры. Также недостатком является необходимость последующей обработки результатов съемки человеком с целью определения состояния опор, в частности их угла наклона.
Наиболее близкими по технической сущности и достигаемому положительному эффекту являются система и способ для обнаружения, идентификации и определения географических координат объектов, расположенных вблизи от автомобильных дорог, с их одновременной фото- и видеосъемкой (патент США №2007171431 A1, G01B 11/24, опубл. 26.07.2007), принимаемая за прототип и включающая установленные на автомобиль двумерное лазерное измерительное устройство для определения расстояний до различных объектов и их размеров, установленное так, чтобы просматривать обочину дороги со стороны; приемник сигналов СНС для определения географических координат автомобиля; электронный датчик ориентации автомобиля, позволяющий совместно с приемником СНС создать модель траектории движения; как минимум одну цифровую камеру, позволяющую получить изображение объектов на обочине дороги; компьютер для синхронизации и сбора данных с перечисленных устройств, а также способ определения местоположения объектов, включающий излучение пучка света лазерными дальномерами, установленными на автомобиле с приемом лазерных данных, отраженных от различных объектов; определение географических координат (X, Y, Z) различных объектов объединением отдельных близко лежащих лазерных измерений в единый объект; определение размера различных объектов, используя группы лазерных измерений, отнесенных к одному объекту; идентификация требуемых объектов среди различных обнаруженных объектов, используя сведения о предопределенных типах объектов, имеющихся в базе данных; фото- и(или) видеосъемку обнаруженных объектов цифровой камерой после их идентификации; определение типа объекта с использованием базы данных предопределенных типов объектов; определение географических координат объекта в виде средней точки среди группы точек, отнесенных к данному объекту; добавление к сведениям о географических координатах сведений о точности определения координат приемником СНС; перевод географических координат (X, Y, Z) в двумерные координаты для записи в базу данных; программную обработку результатов измерений навигационными приборами на компьютере.
Причиной, препятствующей получению указанного ниже технического результата, при использовании известной системы и способа является невозможность определения пространственной ориентации объектов при работе лазерных средств измерения в горизонтальной плоскости, в то время как угол наклона опор линий электропередач является одной из их эксплуатационных характеристик. Кроме того, составная опора без учета ориентации столбов может быть идентифицирована как две отдельные. Дополнительно, в представленной реализации присутствует возможность значительного числа ложных идентификаций опор при использовании для анализа одного лишь размера объекта, поскольку диаметр опор близок к диаметру деревьев.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в определении географических координат, угла наклона и диспетчерского номера опор линий электропередач наиболее простым и дешевым способом.
Для получения указанного технического результата в предлагаемой системе, включающей установку на автомобиль двух лазерных дальномеров, электронного датчика ориентации автомобиля, приемника сигналов СНС и как минимум одной цифровой камеры, согласно изобретению дальномеры устанавливаются в вертикальной плоскости под определенным углом друг к другу, а в кабине устанавливаются микрофон, цифровая клавиатура и джойстик с подключением всех устройств к компьютеру.
Предлагаемая методика предполагает фиксацию в ЭВМ при помощи приемника СНС маршрута движения автомобиля в виде набора географических координат и точного времени нахождения автомобиля в соответствующей точке. Одновременно с этим в память ЭВМ записывается с «привязкой» ко времени угол и направление наклона автомобиля к плоскости горизонта. Для идентификации опор, определения смещения их координат относительно зафиксированных координат приемника СНС, а также для определения их угла наклона предлагается использовать информацию от двух лазерных дальномеров, установленных в вертикальной плоскости под определенным углом друг к другу так, чтобы просматривать обочину дороги со стороны и работающих в непрерывном режиме. Информация от последних также жестко «привязывается» к абсолютному времени, получаемому от приемника СНС.
На основе записанной в память ЭВМ информации моделируется траектория движения автомобиля в промежуточных точках с привязкой координат промежуточных точек к абсолютному времени. Далее строится зависимость скорости движения автомобиля от абсолютного времени. На основе обработки информации от лазерных дальномеров идентифицируются различные объекты, расположенные на обочине, и определяются их смещения относительно траектории движения автомобиля. После фильтрации объектов, заключающейся в объединении отдельных измерений лазерными дальномерами в один объект с географическими координатами (X, Y, Z), производится выбор из базы данных наиболее близкого к объекту по размеру типа опор и в случае незначительных отличий в размерах вычисляются координаты центра (X, Y, Z) для группы точек, относящихся к опоре. После идентификации вторым дальномером опоры и вычисления координат ее центра определяется угол и направление наклона прямой, проходящей через два центра (нижний и верхний). В случае если угол наклона опоры по отношению к горизонтали превышает минимально допустимый, она считается успешно распознанной. В качестве географических координат опоры в базу данных записываются координаты центра множества точек ей принадлежащих и соответствующих полю просмотра нижнего дальномера.
«Привязка» идентифицированных опор к диспетчерским номерам может быть осуществлена вручную на основе сопоставления с поопорными схемами линий, если таковые имеются и являются актуальными. Диспетчерские номера опор могут быть введены при помощи цифровой клавиатуры непосредственно после проезда опоры или записаны в ЭВМ в виде аудиосигнала.
Фото- и(или) видеосъемка цифровой камерой может быть использована в качестве вспомогательной информации при обработке результатов измерений для проверки правильности идентификации опоры и определения ее номера, если он расположен с обратной стороны опоры и не может быть определен непосредственно во время движения.
Джойстик с кнопкой, связанный с ЭВМ, предназначен для начала и остановки аудиозаписи и одновременно позволяет уменьшить число случаев ложной идентификации опор за счет фиксации моментов приближения опор и окончания проезда персоналом, находящимся в автомобиле. В случае если идентификация опор проводится не во время движения, а в режиме постобработки, джойстик может быть также использован и для запуска цифровой камеры.
Таким образом, определение географических координат, диспетчерского номера и угла наклона опор линий электропередач происходит наиболее простым, дешевым и надежным способом за счет использования в качестве транспортного средства автомобиля с установленными на нем в вертикальной плоскости под определенным углом друг к другу двумя лазерными дальномерами, работающими в непрерывном режиме, указания промежутков расположения опор джойстиком и использования для фиксации номеров опор аудиозаписи либо цифровой клавиатуры, а также фото- и(или) видеосъемки опор после их идентификации.
Работа предлагаемой системы поясняется следующими чертежами, на которых представлены:
На фиг.1 изображен автомобиль, оборудованный в соответствии с воплощением существующего изобретения, в процессе просмотра объектов на обочине дороги.
На фиг.2 изображена блок-схема, иллюстрирующая процесс создания базы данных непосредственных измерений в соответствии с воплощением существующего изобретения.
На фиг.3 изображена блок-схема, иллюстрирующая процесс идентификации для единственной опоры в соответствии с воплощением существующего изобретения.
Фиг.1 иллюстрирует автомобиль 1, оборудованный в соответствии с воплощением существующего изобретения, в процессе просмотра объектов на обочине дороги. На автомобиль 1 установлены два лазерных дальномера 2, 3 в защитном кожухе 4 и как минимум одна цифровая камера 5, чтобы получать данные об объектах на обочине на транспортной скорости. Камера может быть фото- или видеокамерой, способной к запуску по внешнему сигналу. Дополнительно на автомобиле 1 присутствует по крайней мере одна антенна 6 для приема сигналов от спутников 7 навигационных систем. В блоке 4 вместе с дальномерами установлен электронный датчик ориентации. Программное обеспечение присутствует для синхронизации и сбора данных от устройств 2, 3, 5, 6 и датчика ориентации в режиме реального времени. Камера 5 устанавливается в любом месте под калибруемым углом наклона. Несколько камер с различной ориентацией могут быть объединены, чтобы служить дополнением к собранной информации.
Лазерные дальномеры 2, 3 расположены сбоку автомобиля так, чтобы просматривать и обнаруживать объекты 8 на обочине дороги. При этом дальномеры устанавливаются в вертикальной плоскости под определенным углом друг к другу. Для надлежащей регистрации опор предусматривается возможность изменять углы наклона дальномеров. В кабине автомобиля 1 предусматривается установка микрофона для записи комментариев персонала, цифровой клавиатуры для набора номера опор и джойстика для начала и остановки записи, одновременно дающего возможность выделить участок трассы, на котором гарантированно находится опора, и запускать цифровую камеру.
Система включает также программное обеспечение для получения, обработки и накопления данных, а также жесткие диски для хранения базы данных измерений, фотоснимков, видео- и аудиозаписей. Обработка результатов измерений может производиться как в процессе движения автомобиля, так и в режиме постобработки. В итоге каждая запись в базе данных включает географические координаты опоры, ее угол и направление наклона, время и дату в системе единого гринвичского среднего времени (UTC), номер аудиозаписи, фотоснимка и(или) видеозаписи, а также информацию о точности регистрации координат приемником СНС.
Обнаружение опор основывается на анализе потока данных от лазерных дальномеров. При этом анализируется форма, местоположение объекта. Местоположение объекта состоит из координат отдельных точек его поверхности, полученных от лазерного дальномера и объединенных в единое целое. На данном шаге используется фильтр близости, определяющий на сколько близко должны лежать друг к другу точки поверхности, чтобы принадлежать одному объекту. В работе фильтра используются помимо данных от дальномеров траектория движения, смоделированная на основе приемника СНС и датчика ориентации, а также сведения о числе измерений дальномерами расстояний. После группировки отдельных измерений проверяется близость длины объекта к диаметру какого-либо из типов опор. Если предыдущее условие выполняется, вычисляется средняя точка группы (с координатами X, Y, Z).
Фиг.2 иллюстрирует процесс создания базы данных непосредственных измерений в соответствии с воплощением существующего изобретения. От навигационных приборов получены следующие данные: дальности от двух лазерных дальномеров, географические координаты от приемника СНС, угол и направление наклона автомобиля от датчика ориентации. Полученных данных достаточно для идентификации и вычисления географических координат опор непосредственно в процессе движения. В то же время, если требуется определить географические координаты опор с большей точностью и нет возможности получать поправки к сигналам СНС при движении, предусматривается постобработка результатов измерений на основании информации из базы данных, созданной в процессе проезда мимо трассы линии электропередач.
Для фиксации номеров опор в кабине автомобиля устанавливаются цифровая клавиатура и микрофон, подключенные к компьютеру. Начало и остановка аудиозаписи происходит по нажатию специальной кнопки джойстика, также подключаемого к компьютеру. Созданный аудиофайл при этом ассоциируется с ближайшей к нему по времени идентифицированной опорой. Вторым предназначением джойстика может быть выделение участков трассы с гарантированным присутствием опоры с целью уменьшения числа ложных идентификаций опор и одновременного создания аудиозаписи, фотоснимка и(или) видеозаписи.
Фиг.3 иллюстрирует процесс идентификации для единственной опоры в соответствии с воплощением существующего изобретения. От навигационных приборов или из базы данных получены следующие данные: дальности от двух лазерных дальномеров, географические координаты от приемника СНС, угол и направление наклона автомобиля от датчика ориентации. Также присутствуют данные об аудиозаписях, фотоснимках и(или) видеозаписях. Географические координаты, зафиксированные подвижным приемником СНС, установленным на автомобиле, уточняются с использованием данных от базового неподвижного приемника СНС. Лазерные данные фильтруются для обнаружения объектов. Для каждого выделенного объекта проводится поиск в базе данных предопределенных типов опор близкого к нему по размеру типа опор и в случае незначительных отличий в размерах вычисляются координаты центра (X, Y, Z) для группы точек, относящихся к опоре. После идентификации вторым дальномером опоры и вычисления координат ее центра определяется угол и направление наклона прямой, проходящей через два центра (нижний и верхний). В случае если угол наклона опоры по отношению к горизонтали превышает минимально допустимый, она считается успешно распознанной. Если на небольшом расстоянии определяется более одного основания опоры и(или) вершин, выбирается такое основание и такая вершина, при которых угол наклона образуемой ими опоры по отношению к горизонтали наиболее близок к 90°. В качестве географических координат опоры в базу данных записываются координаты центра множества точек, ей принадлежащих и соответствующих полю просмотра нижнего дальномера 3.
В предложенном воплощении изобретения используются два лазерных дальномера RIEGL™ LD90-3100VHS-FLP, позволяющие просматривать объекты на расстоянии до 200 метров с частотой 2000 Гц, используя инфракрасный лазерный луч. Инструмент использует для вычисления расстояния измерение времени полета луча. В качестве цифровой камеры может использоваться фотокамера SONY DFW-SX910, использующая ½'' CCD матрицу и позволяющая получить несжатые, цифровые цветные изображения с высокой разрешающей способностью и высокой ясностью на высокой скорости.
При использовании современных приемников СНС и лазерных дальномеров точность фиксации координат опор при использовании описанной системы может составлять несколько сантиметров, что вполне приемлемо для практических целей эксплуатации электрических сетей 0,38-10 кВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННАЯ СИСТЕМА НА АВТОМОБИЛЯХ ТАКСИ | 2005 |
|
RU2308770C2 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ЛИНЕЙНОЙ ЧАСТИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616736C1 |
| Способ информационного обеспечения пассажиров общественного транспорта и устройство информационного обеспечения пассажиров общественного транспорта. | 2018 |
|
RU2697496C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫДЕЛА ЛЕСА ДЛЯ ЭЛЕКТРОННОЙ ТЕМАТИЧЕСКОЙ ЛЕСНОЙ КАРТЫ | 2007 |
|
RU2378823C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
Изобретение относится к области автоматизированных систем инвентаризации электрооборудования, а именно к устройствам и методам обнаружения, идентификации, определения географического местоположения и пространственной ориентации опор линий электропередач, установленных вблизи автомобильных дорог. Технический результат изобретения заключается в определении географических координат, угла наклона и диспетчерского номера опор линий электропередач наиболее простым и дешевым способом. В системе, включающей установку на автомобиль двух лазерных дальномеров, электронного датчика ориентации автомобиля, приемника сигналов спутниковых навигационных систем и как минимум одной цифровой камеры, согласно изобретению дальномеры устанавливаются в вертикальной плоскости под определенным углом друг к другу, а в кабине устанавливается микрофон, цифровая клавиатура и джойстик с подключением всех устройств к компьютеру. При идентификации опор линий электропередач рассчитывается значение угла и направления наклона по отношению к горизонтали прямой, проведенной через центры опор, определенных нижним и верхним лазерным дальномером, и в качестве географических координат опоры в базу данных записываются координаты центра множества точек, ей принадлежащих и соответствующих полю просмотра нижнего дальномера. Диспетчерские номера опор вводятся при помощи цифровой клавиатуры непосредственно после проезда опоры либо записываются в виде аудиозаписи, запускаемой и останавливаемой кнопкой джойстика. Джойстик с кнопкой служит также для уменьшения числа ложных идентификаций опор линий электропередач за счет фиксации моментов приближения опор и окончания проезда персоналом, находящимся в автомобиле; в случае если идентификация опор проводится не во время движения, а в режиме постобработки, джойстик используется дополнительно для запуска цифровой камеры. 2 н.п. ф-лы, 3 ил.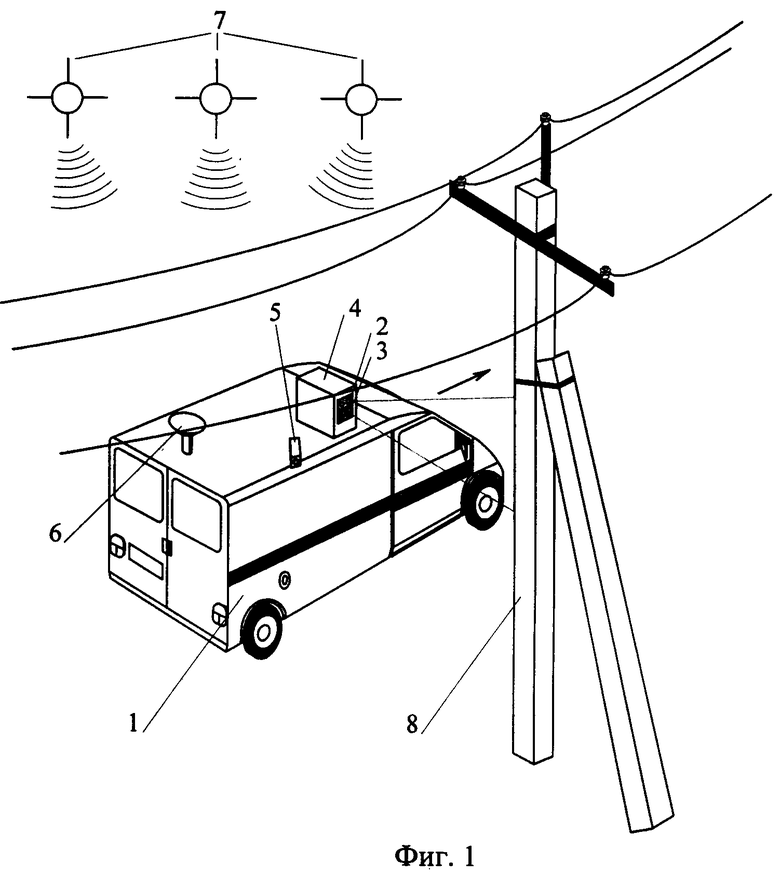
1. Система для определения местоположения и пространственной ориентации опор линий электропередач, включающая установленные на автомобиль: два лазерных дальномера для определения расстояний до различных объектов и их размеров, установленные так, чтобы просматривать обочину дороги со стороны; приемник сигналов спутниковой навигационной системы (СНС) для определения географических координат автомобиля; электронный датчик ориентации автомобиля, позволяющий совместно с приемником СНС создать модель траектории движения; как минимум одну цифровую камеру, позволяющую получить изображение объектов на обочине дороги; компьютер для синхронизации и сбора данных с перечисленных устройств, отличающаяся тем, что дальномеры устанавливаются в вертикальной плоскости под определенным углом друг к другу, а в кабине автомобиля устанавливается микрофон, цифровая клавиатура и джойстик, подключенные к компьютеру.
2. Способ работы системы для определения местоположения и пространственной ориентации опор линий электропередач, включающий: излучение пучка света лазерными дальномерами, установленными на автомобиле с приемом лазерных данных, отраженных от различных объектов; определение географических координат (X, Y, Z) различных объектов объединением отдельных близко лежащих лазерных измерений в единый объект; определение размера различных объектов, используя группы лазерных измерений, отнесенных к одному объекту; обнаружение опор линий электропередач среди различных объектов, используя сведения о возможных диаметрах опор, имеющиеся в базе данных предопределенных типов опор; фото- и(или) видеосъемку обнаруженных опор цифровой камерой после их идентификации; определение типа опор линий электропередач с использованием базы данных предопределенных типов опор; определение географических координат опор линий электропередач в виде средней точки среди группы точек, отнесенных к опоре; добавление к сведениям о географических координатах сведений о точности определения координат приемником СНС; перевод географических координат (X, Y, Z) в двумерные координаты для записи в базу данных; программную обработку результатов измерений навигационными приборами на компьютере, отличающийся тем, что при идентификации опор линий электропередач рассчитывается значение угла и направления наклона по отношению к горизонтали прямой, проведенной через центры опор, определенных нижним и верхним лазерным дальномером; в качестве географических координат опоры в базу данных записываются координаты центра множества точек ей принадлежащих, и соответствующих полю просмотра нижнего дальномера; диспетчерские номера опор вводятся при помощи цифровой клавиатуры, непосредственно после проезда опоры, либо записываются в виде аудиозаписи, запускаемой и останавливаемой кнопкой джойстика; джойстик с кнопкой служит для уменьшения числа ложных идентификаций опор линий электропередач за счет фиксации моментов приближения опор и окончания проезда персоналом, находящимся в автомобиле; в случае, если идентификация опор проводится не во время движения, а в режиме постобработки, джойстик используется дополнительно для запуска цифровой камеры.
| Способ вулканизации резиновых смесей | 1938 |
|
SU55965A1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| КУРСОГРАФ | 2004 |
|
RU2257544C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОГО ВИДЕОНАБЛЮДЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СИТУАЦИЙ | 2003 |
|
RU2268497C2 |
| US 6839560 B1, 04.01.2005. | |||

