Область техники, к которой относится изобретение
Настоящее изобретение относится к области интеллектуальных транспортных систем, и, более конкретно, к устройству и системе регистрации дорожной обстановки.
Уровень техники
Согласно статистике, самый высокий процент по соотношению количества ДТП и тяжести последствий приходится на такие нарушения, как:
- Выезд на полосу встречного движения.
- Несоответствие скорости транспортного средства (ТС) конкретным условиям движения.
- Нарушение правил расположения ТС на проезжей части.
В связи с этим в мире активно внедряются и развиваются программы и системы повышения безопасности дорожного движения. Как правило, они направлены на борьбу с каким-то определенным видом нарушения. Одной из главных мер по снижению количества ДТП является контроль соблюдения скорости, так как прочие нарушения сложно выявлять в автоматическом режиме из-за невозможности полного охвата автодорог видеокамерами.
Среди известных систем популярны, например, устройства измерения моментальной скорости. Такие системы действительно дают свои результаты, уменьшая количество происшествий, поскольку водители соблюдают правила дорожного движения в поле действия системы – фактически, в пределах нескольких метров или десятков метров около нее.
Системы определения средней скорости (такие как RU 2606521 C1) стали следующим шагом в попытке обеспечить контроль соблюдения ПДД на несколько более протяженном участке дороги по сравнению с системами определения моментальной скорости.
Также в настоящее время стали внедряться различные интеллектуальные системы, которые упрощают решение некоторых задач, которые ставит перед обществом сложившаяся окружающая среда. Например, в сфере транспорта и дорожной инфраструктуры стали применяться умные светофоры, такие как заявленные в документах CN 108961788 A и CN 109087510 A, которые фиксируют на камеру обстановку на перекрёстке и путем сравнения кадров могут, например, определять наличие затора в полосе движения, измерять плотность движения, изменение скорости при проезде перекрестка и другие параметры, а также прогнозировать возможный затор и своевременно переключать свет, чтобы перекресток оставался свободным.
В документе CN 105225482 A описывается стационарная камера, которая с помощью интеллектуального анализа изображений выявляет скорость, высоту, марку автомобиля и другие его признаки.
Однако все эти, как и многие другие используемые в настоящее время системы контроля дорожного движения, преимущественно работают в стационарном режиме (размещаются на опорах у дорог) или квазистационарном (передвижном) режиме (переносятся с места на место операторами). Обычно в этих системах ГЛОНАСС/GPS используют только для высокоточного определения времени.
Соответственно, современные системы работают лишь в определенных узких локациях, и это не гарантирует безопасную обстановку везде, так как те же самые водители могут потенциально прекратить соблюдать скоростной режим за пределами видимости таких систем, что может вызвать возникновение ДТП в зонах, не охваченных подобными системами.
Более того, такие серьезные правонарушения, как выезд на встречную полосу или агрессивное вождение, вообще в большинстве своем остаются без контроля, так как, несмотря на то, что возможность контроля выезда на встречную полосу и рядности движения в некоторых комплексах (таких как многоцелевой фоторадарный комплекс «Кордон», аппаратно-программный комплекс автоматического распознавания государственных регистрационных знаков транспортных средств и фиксации нарушений ПДД «АвтоУраган-ВСМ», многоцелевые комплексы автоматической фотофиксации нарушений правил дорожного движения «СКАТ») заявлена, фактически их применение крайне ограничено радиусом действия (несколько десятков метров), и к тому же, для выявления таких нарушений часто сложно собрать доказательную базу: недостаточно фото с одной камеры, важно показать нарушение с разных ракурсов.
Решением могли бы стать мобильные системы фото- и видеофиксации. Попытки их создания, безусловно, также известны из уровня техники.
Например, такие системы, как RU 126174 U1, контролируют только правила стоянки автомобилей. При этом они требуют участия инспекторов дорожного движения, так как данные комплексы способны измерить только собственное местоположение, а не положение фиксируемых автомобилей.
Известна заявленная в патенте RU 110856 U1 система фиксации нарушений скоростного режима транспортным средством, которая при соблюдении определенных условий может быть мобильной, однако она не может фиксировать нарушения, отличные от превышения средней скорости, является недостаточно точной, требуя минимального расстояния между регистраторами в 500 м, а также не может применяться при отклонениях формы дороги от прямой линии.
В документе CN 103366575 A предлагается использовать камеру, установленную на автобусе, для выявления заторов. Автобус регулярно передает в центральный сервер данные о своем местоположении, времени скорости и регистрационном знаке. Центральный сервер собирает эти данные, сопоставляет их с соответствующими участками дорог, выявляет средние скорости на участках дорог и определяет участки, имеющие затор. Камера здесь используется исключительно для того, чтобы оператор мог вручную посмотреть в режиме реального времени, есть ли действительно затор около автобуса, находящегося в данный момент на участке, который автоматически пометился сервером как участок с затором.
Известны также другие решения, которые относятся к машинному зрению и используются в обычных и в автономных транспортных средствах для определения условий окружающей среды, для обнаружения препятствий, для обнаружения объектов инфраструктуры, таких как дорожные знаки, для обнаружения автомобилей в соседних полосах движения, для предотвращения столкновений и т.д.
Наиболее близким к настоящему решению является документ US 2018/357484 A1, в котором описывается система, которая путем анализа видео, получаемого с нескольких камер, расположенных по периметру автомобиля, способна определять факты неправомерного и «ненормального» вождения окружающих автомобилей и неправомерных действий пешеходов и велосипедистов. Однако в данном решении не определяются и не учитываются координаты окружающих автомобилей, что снижает ценность и достоверность сведений о выявленных нарушениях.
Соответственно, несмотря на развитие систем повышения безопасности дорожного движения, пока не существует такой системы контроля дорожной обстановки, которая распространяла бы свое действие повсеместно и при этом была бы высоко автономной и могла бы с достаточно высокой степенью точности позиционировать фиксируемые объекты и обеспечивать достоверность выявленных сведений.
Сущность изобретения
С целью устранения по меньшей мере некоторых из вышеупомянутых недостатков предшествующего уровня техники, настоящее изобретение направлено на расширение границ эксплуатации систем повышения безопасности дорожного движения, с тем чтобы приборы фиксации контроля дорожной обстановки можно было применять в тех местах, где ранее имелись ограничения для внедрения таких приборов.
Согласно первому аспекту настоящего изобретения, предложено устройство для регистрации дорожной обстановки, выполненное с возможностью перемещения в области автодороги или вблизи нее и содержащее:
блок фиксации, содержащий камеру и выполненный с возможностью фиксации изображения фиксируемого объекта, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания по меньшей мере одного характерного признака фиксируемого объекта на основе зафиксированного изображения;
блок навигации, выполненный с возможностью определения географических координат и направления данного устройства и синхронизации времени по меньшей мере на основе данных, принимаемых от глобальной навигационной спутниковой системы (GNSS);
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени от блока навигации; и
блок геопозиционирования фиксируемого объекта, выполненный с возможностью определения местоположения и направления фиксируемого объекта на момент фиксации на основе изображения фиксируемого объекта и данных от блока навигации.
В одном из вариантов осуществления направлением является направление, в котором перемещается или в которое обращено данное устройство или фиксируемый объект.
В одном из вариантов осуществления данное устройство установлено на мобильный объект, выполненный с возможностью перемещения в области автодороги или вблизи нее.
В одном из вариантов осуществления мобильным объектом, на которое установлено данное устройство, является контролирующее транспортное средство, беспилотный аппарат, человек или животное.
В одном из вариантов осуществления фиксируемым объектом является транспортное средство, человек, элемент дорожной инфраструктуры, элемент окружающей среды.
В одном из вариантов осуществления дорожная инфраструктура содержит дорожное покрытие, разметку, обочины, разделительные полосы, ограждения, освещение, дорожные знаки, светофоры.
В одном из вариантов осуществления окружающая среда содержит здания, сооружения, растения.
В одном из вариантов осуществления по меньшей мере один характерный признак фиксируемого объекта содержит по меньшей мере одно из
- размера в целом или размера отдельных частей фиксируемого объекта,
- типа фиксируемого объекта,
- государственного регистрационного знака, типа, марки или модели фиксируемого транспортного средства,
- лица или частей тела фиксируемого человека.
В одном из вариантов осуществления устройство дополнительно содержит
блок обнаружения ключевых точек, выполненный с возможностью обнаружения на нескольких изображениях одинаковых элементов, которые хорошо различимы на разных кадрах,
причем блок навигации дополнительно выполнен с возможностью определения смещения одинаковых элементов относительно предыдущего кадра и определения направления данного устройства на основе результатов определения.
В одном из вариантов осуществления, если на зафиксированном изображении распознано несколько неподвижных объектов, для которых заранее известно их точное местоположение и реальные размеры, блок навигации выполнен с возможностью определения местоположения данного устройства дополнительно на основе сопоставления размеров каждого из этих объектов с их реальными размерами и сопоставления взаимного расположения этих объектов друг относительно друга и относительно данного устройства.
В одном из вариантов осуществления камера является стереокамерой,
причем устройство дополнительно содержит:
блок картографирования, выполненный с возможностью:
- определения расстояния до объектов на зафиксированном изображении на основе расстояния между объективами стереокамеры,
- формирования карты глубины на основе определенных расстояний до объектов,
- построения облака точек на основе карты глубины,
- определения размеров объектов на изображении и их местоположения относительно стереокамеры по облаку точек,
- определения географических координат объектов на изображении с использованием их определенных размеров и местоположения относительно стереокамеры, а также с использованием географических координат данного устройства и направления обзора стереокамеры.
В одном из вариантов осуществления направление обзора стереокамеры соответствует направлению данного устройства с учетом угла поворота стереокамеры относительно данного устройства.
В одном из вариантов осуществления блок навигации содержит по меньшей мере два приемника GNSS,
каждый приемник GNSS выполнен с возможностью соединения с соответствующей антенной,
антенны разнесены друг от друга на фиксированное расстояние.
В одном из вариантов осуществления мобильным объектом является транспортное средство,
по меньшей мере одна из антенн встроена в стекло транспортного средства и/или по меньшей мере одна из антенн закреплена на крыше транспортного средства.
В одном из вариантов осуществления мобильным объектом является транспортное средство,
все антенны встроены в или нанесены на лобовое стекло или заднее стекло в зоне действия стеклоочистителей.
В одном из вариантов осуществления мобильным объектом является транспортное средство,
антенны расположены в одной плоскости и разнесены друг от друга на расстояние около 0.5 м.
В одном из вариантов осуществления блок навигации содержит по меньшей мере три приемника GNSS,
блок навигации выполнен с возможностью измерения углов рыскания, тангажа и крена посредством объединения показаний с упомянутых по меньшей мере трех приемников, измерения разности фаз сигналов, получаемых от GNSS, и определения направления данного устройства на момент фиксации на основе результатов измерений.
В одном из вариантов осуществления блок навигации выполнен с возможностью определения направления данного устройства на момент фиксации на основе величины азимута, полученной из результатов измерений.
В одном из вариантов осуществления блок навигации выполнен с возможностью выявления спуфинг-атаки (подмены истинных координат приемника GNSS данными злоумышленника) на основе определения, что по меньшей мере два приемника GNSS получили одинаковый сигнал.
В одном из вариантов осуществления устройство дополнительно содержит встроенные часы,
в случае выявления спуфинг-атаки блок определения времени фиксации дополнительно выполнен с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени только от встроенных часов.
В одном из вариантов осуществления блок геопозиционирования фиксируемого объекта дополнительно выполнен с возможностью приостановки своей работы в случае выявления спуфинг-атаки.
В одном из вариантов осуществления устройство дополнительно содержит блок контроля, выполненный с возможностью определения, соответствует ли местоположение и/или направление фиксируемого объекта предварительно установленным требованиям.
В одном из вариантов осуществления устройство дополнительно содержит блок контроля, выполненный с возможностью определения параметров размещения фиксируемого объекта и/или событий, связанных с размещением фиксируемого объекта, на основе одного или более изображений фиксируемого объекта, и определения, соответствуют ли параметры размещения фиксируемого объекта и/или события, связанные с размещением фиксируемого объекта, предварительно установленным требованиям.
В одном из вариантов осуществления устройство дополнительно содержит блок контроля, выполненный с возможностью определения параметров перемещения фиксируемого объекта и/или событий, связанных с перемещением фиксируемого объекта, на основе двух или более изображений фиксируемого объекта, имеющих разное время фиксации, и определения, соответствуют ли параметры перемещения фиксируемого объекта и/или события, связанные с перемещением фиксируемого объекта, предварительно установленным требованиям.
В одном из вариантов осуществления устройство дополнительно содержит блок контроля выполнен с возможностью определения параметров размещения или перемещения фиксируемого объекта и/или событий, связанных с размещением или перемещением фиксируемого объекта, на основе определения, что в разные моменты времени зафиксирован один и тот же фиксируемый объект, выполняемого на основе распознавания блоком распознавания по меньшей мере одного одинакового характерного признака фиксируемого объекта на разных зафиксированных изображениях.
В одном из вариантов осуществления параметры размещения фиксируемого объекта содержат по меньшей мере одно из следующего: местоположение фиксируемого объекта, местоположение частей фиксируемого объекта.
В одном из вариантов осуществления события, связанные с размещением фиксируемого объекта, содержат по меньшей мере одно из следующего: остановка, стоянка, препятствование проезду транспорта, проходу пешеходов.
В одном из вариантов осуществления параметры перемещения фиксируемого объекта содержат по меньшей мере одно из следующего: направление перемещения фиксируемого объекта, траектория перемещения фиксируемого объекта, мгновенная скорость фиксируемого объекта, средняя скорость фиксируемого объекта, расстояние, пройденное за время между моментами фиксации, расстояние до соседних транспортных средств, пешеходов или объектов дорожной инфраструктуры.
В одном из вариантов осуществления события, связанные с перемещением фиксируемого объекта, содержат по меньшей мере одно из следующего: остановка, проезд регулируемого перекрестка, проезд нерегулируемого перекрестка, пересечение пешеходного перехода, пересечение линии разметки, перестроение, обгон, перемещение по дороге или вне её.
В одном из вариантов осуществления устройство дополнительно содержит блок хранения данных, выполненный с возможностью хранения данных, полученных по меньшей от одного из блоков данного устройства.
В одном из вариантов осуществления устройство дополнительно содержит блок хранения карты, выполненный с возможностью хранения карты глубины и/или облака точек.
В одном из вариантов осуществления устройство дополнительно содержит блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции.
В одном из вариантов осуществления поправки, получаемые от базовой станции, реализованы согласно системе дифференциальной коррекции.
В одном из вариантов осуществления определение географических координат объектов выполняется с использованием проекции географических координат, определенных блоком геопозиционирования фиксируемого объекта в момент фиксации изображения фиксируемого объекта, на профиле местности, сохраненном в блоке хранения карты.
В одном из вариантов осуществления упомянутая проекция определяется по кратчайшему расстоянию между упомянутыми определенными географическими координатами и координатами профиля местности.
В одном из вариантов осуществления устройство дополнительно содержит блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному объекту на основе данных, полученных по меньшей от одного из блоков данного устройства.
В одном из вариантов осуществления устройство дополнительно содержит передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных и/или на другое устройство для регистрации дорожной обстановки.
В одном из вариантов осуществления устройство дополнительно содержит приемник, выполненный с возможностью приема метаданных от центра обработки данных и/или от другого устройства для регистрации дорожной обстановки.
В одном из вариантов осуществления карта дополнительно содержит данные о зонах, содержащих ограничения касательно размещения или перемещения на них транспортных средств,
причем устройство дополнительно содержит блок контроля, выполненный с возможностью определения, соответствует ли местоположение и/или направление фиксируемого объекта предварительно установленным требованиям,
причем блок контроля выполнен с возможностью выявления несоответствия на основе того, что параметры размещения или перемещения фиксируемого транспортного средства не соответствуют наложенным на него ограничениям в данной зоне карты
В одном из вариантов осуществления в разные моменты времени один и тот же фиксируемый объект зафиксирован разными устройствами для регистрации дорожной обстановки.
В одном из вариантов осуществления в разные моменты времени один и тот же фиксируемый объект зафиксирован данным устройством.
В одном из вариантов осуществления устройство дополнительно содержит радар, выполненный с возможностью измерения скорости и направления фиксируемого объекта на основе эффекта Доплера.
Согласно второму аспекту настоящего изобретения, предложена система для контроля движения транспортных средств, содержащая:
- регистратор транспортных средств, установленный на контролирующее транспортное средство, расположенное на автодороге или вблизи нее, и содержащий устройство для регистрации дорожной обстановки по первому аспекту; и
- центр обработки данных, выполненный с возможностью приема, обработки, передачи и хранения данных и/или метаданных о фиксируемых объектах и на основе упомянутых метаданных определения, соответствует ли местоположение, направление, параметры размещения фиксируемого объекта события, связанные с размещением фиксируемого объекта, предварительно установленным требованиям.
Технический результат
Настоящее изобретение обеспечивает улучшенный контроль любых нарушений и дорожной обстановки в целом. Система позволяет увеличить безопасность на дорогах за счет повышения вероятности выявления нарушений и связанным с этим изменением психологии водителей, сделав их активными участниками безопасного движения. При этом обеспечивается:
- возможность работы в мобильном режиме (в движении);
- фиксация дорожной обстановки без излучения («невидимость» для радар-детекторов);
- фиксация недоступных ранее для контроля типов нарушений ПДД (выезд на встречную полосу, движение по полосе для общественного транспорта или обочине, нарушение правил расположения ТС, опасное вождение и др.),
- повышенная точность позиционирования фиксируемых объектов, а не только самого устройства,
- повышение достоверности выявляемых сведений о дорожной обстановке, в частности, о нарушениях ПДД.
Эти и другие преимущества настоящего изобретения станут ясны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На Фиг. 1 показан принцип работы традиционной системы для контроля движения транспортных средств.
На Фиг. 2 показан пример работы комплекса мобильных регистраторов для случая определения средней скорости движения транспортного средства.
На Фиг. 3 показан пример работы комплекса мобильных регистраторов для случая выявления нарушения правил расположения.
Следует понимать, что фигуры могут быть представлены схематично и не в масштабе и предназначены, главным образом, для улучшения понимания настоящего изобретения.
Подробное описание
Обзор традиционной фиксированной системы для контроля движения транспортных средств
На Фиг. 1 показан принцип работы традиционной системы для контроля движения транспортных средств. Система включает в себя два устройства регистрации ТС (транспортных средств). Устройства регистрации ТС устанавливаются на въезде и выезде из зоны контроля средней скорости V на участке дороги, причем протяженность S зоны контроля заранее определена. Каждое из устройств регистрации ТС содержит средство фотофиксации и/или видеофиксации ТС для получения фотоизображения ТС в высоком разрешении. Каждое из устройств распознает область на фотоизображении, содержащую представление номерного знака ТС, и преобразует полученное графическое представление номерного знака ТС в буквенно-цифровой вид. Первоначальное фотоизображение, содержащее изображение ТС, сохраняется на каждом из средств регистрации ТС, на котором оно было сделано. Средства регистрации ТС связаны со спутниками глобальной навигационной спутниковой системы (GNSS), например, GPS, ГЛОНАСС, что позволяет определить время фиксации ТС в каждой зоне соответствующего устройства регистрации ТС. Каждая из зон представляет собой область, видимую устройством регистрации ТС, и каждая из упомянутых областей разделена на некоторое количество зон.
Полученную информацию от средств регистрации ТС передают с помощью каналов передачи данных, например с помощью беспроводных сетей GPRS, 3G, 4G, LTE, Wi-Fi, WiMax, на сервер, с помощью которого выполняется вычисление пройденного пути S.
На сервере определяется время ДT проезда контролируемого участка дороги ТС как разность между временем выезда t2 из зоны и временем въезда t1 в зону контролируемого участка дороги, с помощью чего затем определяют среднюю скорость V движения ТС на контролируемом участке дороги длиной S по формуле V=S/(t2-t1).
Такая система является в целом эффективной и точной, однако она работает, как было показано выше, лишь в небольшой ограниченной области, тогда как остальная дорога не охвачена контролем дорожного движения, и водители ТС, зная об отсутствии контроля, потенциально могут нарушить правила, что ведет к снижению безопасности дорожного движения и к повышению аварийности.
В то же время, необходимо понимать, что система согласно настоящему изобретению может содержать те или иные из вышеперечисленных элементов традиционной системы и выполнять те или иные их функции, если это применимо и не противоречит предложенным подходам. Например, в настоящем изобретении могут применяться аналогичные средства фиксации и передачи данных, принципы измерения скорости и т.д.
Система для регистрации дорожной обстановки согласно настоящему изобретению
В настоящем изобретении предлагается выработка нового подхода к контролю соблюдения ПДД (правил дорожного движения) за счет перехода от контроля ПДД дорогостоящими стационарными комплексами к контролю компактными передвижными приборами, которые в перспективе могут быть встроены во все автомобили, то есть к внедрению средств контроля за соблюдением правил дорожного движения и мониторинга дорожной обстановки непосредственно в транспортный поток. Это достигается за счет включения инструментов точного геопозиционирования окружающих объектов в движении и объединения данных с этих устройств в единую вычислительную сеть для получения более полной информации по каждому дорожному событию и для возможности аналитической обработки информации о транспортных потоках статистическими и методами машинного обучения.
В настоящем изобретении система для регистрации дорожной обстановки обеспечивает позиционирование с высокой точностью, что обеспечивает возможность выявлять нарушения с привязкой к карте. А объединение приборов в едином информационном пространстве позволит выявлять нарушения, которые требуют фиксации нарушителя с разных ракурсов на участках автодороги любой протяженности, например, опасное вождение, движение по встречной полосе и т.д.
В частности, предлагается система для регистрации дорожной обстановки, содержащая одно или более мобильных устройств для регистрации дорожной обстановки и удаленный центр обработки данных.
Одним из основных назначений мобильных устройств и системы для регистрации дорожной обстановки в целом является контроль движения транспортных средств как с целью выявления нарушений правил дорожного движения и иных установленных норм, так и в целях проведения всевозможных измерений и статистических исследований, например, для использования в интеллектуальных системах управления дорожным хозяйством. При этом следует понимать, что предложенная система и устройство могут регистрировать помимо транспортных средств и другие объекты, попадающие в область их действия, такие как люди, элементы дорожной инфраструктуры, элементы окружающей среды. Дорожная инфраструктура содержит дорожное покрытие, разметку, обочины, разделительные полосы, ограждения, освещение, дорожные знаки, светофоры и другие элементы, которые используются в дорожном хозяйстве и могут фиксироваться регистратором. Окружающая среда содержит здания, сооружения, растения и другие элементы, которые могут фиксироваться регистратором, если это целесообразно с точки зрения требований конкретного применения. Дальнейшее описание для удобства понимания приводится в основном в отношении регистрации (фиксации и распознавания) транспортных средств, однако настоящее изобретение применимо и к другим указанным выше объектам в случаях, когда это доступно, осуществимо и целесообразно.
Мобильное устройство для регистрации дорожной обстановки, входящее в систему для регистрации дорожной обстановки, далее в настоящем документе может называться как «регистратор». В одном из частных вариантов осуществления устройство для регистрации дорожной обстановки является регистратором транспортных средств (РТС), однако следует понимать, что к данному устройству применима и другая возможная терминология – например, «камера», «радар» и т.д.
Регистратор, будучи компактным прибором, установлен на мобильный объект, такой как транспортное средство (в настоящем документе оно может также называться контролирующим транспортным средством или вторым транспортным средством в целях его различения от других транспортных средств, упоминаемых здесь). Например, он может быть установлен в патрульном автомобиле, такси, автобусе, ином общественном транспорте, в транспорте специального назначения, на мотоцикле, велосипеде, сегвее или любом другом подходящем объекте, который может располагаться и двигаться на автодороге или вблизи нее. Кроме того, в одном из вариантов осуществления в качестве мобильного объекта может также рассматриваться беспилотный аппарат, как летательный, так и перемещающийся по земле, человек, переносящий такой регистратор, или животное, такое как патрульная лошадь или собака. То есть предлагаемый регистратор является не стационарным и не квазистационарным, а по-настоящему мобильным прибором.
Регистратор включает в себя несколько блоков: блок фиксации, блок распознавания, блок навигации, блок определения времени фиксации и блок геопозиционирования фиксируемого объекта и память (блок хранения данных), а также опционально передатчик, приемник, блок формирования метаданных, блок обнаружения ключевых точек, блок картографирования, встроенные часы, блок контроля.
Блок фиксации содержит фотокамеру и/или видеокамеру, которая в процессе движения мобильного объекта (например, автобуса, в кабине которого установлен регистратор) осуществляет, соответственно, периодическую или непрерывную съемку окружающего пространства, попадающего в поле обзора камеры. Следует понимать, что мобильный объект не обязан двигаться непрерывно, поскольку он может останавливаться, например, на светофорах, на остановках или в дорожных заторах, но съемка при этом все равно может вестись. В поле обзора камеры могут постоянно или время от времени находиться или попадать фиксируемые объекты. Когда в поле обзора камеры попадает или находится фиксируемый объект (например, проезжающее мимо транспортное средство или стоящее транспортное средство, мимо которого проезжает мобильный объект с регистратором), происходит фиксация изображения этого объекта (в настоящем документе он может также называться фиксируемым транспортным средством или первым транспортным средством в целях его различения от других транспортных средств, упоминаемых здесь).
Исходя из зафиксированного изображения фиксируемого объекта, блок распознавания по возможности распознает по меньшей мере один его характерный признак. В вариантах осуществления настоящего изобретения характерным признаком фиксируемого объекта может быть размер фиксируемого объекта в целом, или размер отдельных частей фиксируемого объекта, или тип фиксируемого объекта. В зависимости от того, что из себя представляет фиксируемый объект и в зависимости от конкретного назначения регистратора, характерным признаком фиксируемого объекта также может быть государственный регистрационный знак (ГРЗ), тип, марка или модель фиксируемого транспортного средства, если фиксируемым объектом является транспортное средство, или лицо или части тела фиксируемого человека, если фиксируемым объектом является человек. В дополнительных вариантах осуществления могут фиксироваться и другие характерные признаки, такие как цвет, наличие повреждений фиксируемого транспортного средства.
Блок навигации на основе данных, принимаемых от глобальной навигационной спутниковой системы (GNSS), такой как GPS, ГЛОНАСС, BeiDou, Galileo, QZSS, определяет географические координаты и направление регистратора и синхронизирует время. При этом направлением может быть направление, в котором перемещается или в которое обращен регистратор.
Блок определения времени фиксации определяет момент времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о точном времени от блока навигации.
Блок геопозиционирования фиксируемого объекта определяет местоположение и направление фиксируемого объекта на момент фиксации на основе изображения фиксируемого объекта и данных от блока навигации. При этом направлением может быть направление, в котором перемещается или в которое обращен фиксируемый объект.
За счет использования возможностей распознавания характерных признаков фиксируемого объекта в сочетании с определением положения как самого регистратора, так и фиксируемого объекта с учетом их направлений обеспечивается повышенная точность позиционирования фиксируемого объекта и повышение достоверности выявляемых сведений о дорожной обстановке, в частности, о нарушениях ПДД, при этом поддерживается возможность работы в мобильном режиме (в движении), фиксация дорожной обстановки происходит без излучения (так как камеры «невидимы» для радар-детекторов), а также обеспечивается возможность фиксации недоступных ранее для контроля типов нарушений ПДД (выезд на встречную полосу, движение по полосе для общественного транспорта или обочине, нарушение правил расположения ТС, опасное вождение и др.).
Определение направления и местоположения
Для определения или уточнения направления и местоположения в дополнение к GNSS могут быть использованы различные методики. В одном из вариантов осуществления настоящего изобретения регистратор может дополнительно содержать блок обнаружения ключевых точек, который обнаруживает на нескольких изображениях одинаковые элементы, которые хорошо различимы на разных кадрах (например, угол здания). Конкретная технология поиска ключевых точек не является предметом настоящего изобретения и может быть известна для специалистов в данной области техники - например, может использоваться технология SURF, SIFT, ORB и др.
Блок навигации определяет смещение выявленных блоком определения ключевых точек одинаковых элементов относительно предыдущего кадра и определения направления данного устройства и/или фиксируемого объекта на основе результатов определения. Конкретная технология сопоставления ключевых точек не является предметом настоящего изобретения и может быть известна для специалистов в данной области техники - например, может использоваться технология FLANN, BFMatcher и др.
Главная задача, которую решает регистратор - это определение географических координат объектов, которые попадают в кадр видеосистемы. Соответственно, в данном варианте осуществления регистратор получает несколько последовательных снимков, на которых далее определяет координату фиксируемого объекта и по его смещению определяет направление движения фиксируемого объекта. Так как объект протяженный, то на последовательности снимков можно определить координату одной и той же точки объекта. При этом местоположение и реальные размеры неподвижных объектов знать не нужно. Определяется множество ключевых точек на разных кадрах и статистически отсеиваются те ключевые точки, которые расположены на подвижных объектах.
Направление движения фиксируемого объекта по умолчанию должно совпадать с разрешенным направлением движения на данном участке. Направление движения автомобиля важно понимать, например, для задач выявления нарушений, таких как выезд на встречную полосу, чтобы доказать, что автомобиль двигался в направлении, противоположном разрешенному.
Определить таким образом можно не только направление, но и перемещение регистратора. При этом GNSS может использоваться для 1) привязки к глобальной системе координат, 2) уточнения величины перемещения (так как возможна набегающая ошибка, если использовать исключительно обработку снимков) и 3) выявления случаев потери ключевых точек, ошибок в работе модуля (например, если много ключевых точек нашлось на сильно удаленных объектах, то регистратор может сделать вывод, что находится на месте, а GNSS может скорректировать эти показания, указывая на явное передвижение в пространстве).
В частности, направление перемещения самого регистратора может фиксироваться, например, GPS или ГЛОНАСС приемником (блоком навигации). На его выходе выдается азимут – направление, куда движется приемник. В случае, если приемник стоит на месте, то и направление движения по GNSS определить затруднительно. В этом случае может использоваться упомянутая выше методика. Несмотря на то, что сами по себе технологии поиска и выявления ключевых точек не дают привязки к географическим координатам, они позволяют измерить смещения объектов в кадре. Решается задача определения местоположения и направления камеры при заданном смещении большого числа объектов в кадре. Соответственно, когда камера перемещается, оцениваемое смещение ключевых точек на соседних кадрах может указывать на перемещение регистратора или фиксируемого объекта.
В другом варианте осуществления, если на зафиксированном изображении распознано несколько неподвижных объектов, для которых заранее известно их точное местоположение и реальные размеры, блок навигации может определить или уточнить местоположение регистратора или фиксируемого объекта дополнительно на основе сопоставления размеров каждого из этих распознанных неподвижных объектов с их реальными размерами и сопоставления взаимного расположения этих объектов друг относительно друга и относительно регистратора или фиксируемого объекта.
Указанные в этом разделе методики являются алгоритмическими и могут выполняться программно без использования дополнительных физических средств, что существенно снижает размеры и стоимость устройства, при этом поддерживается высокая точность показаний регистратора за счет взаимного положительного влияния показаний данных алгоритмов и показаний GNSS.
Стереокамера
Ещё в одном из вариантов осуществления настоящего изобретения камера может являться стереокамерой, то есть камерой с двумя или более объективами. Регистратор может дополнительно содержать блок картографирования, который определяет расстояние до объектов на зафиксированном изображении на основе расстояния между объективами стереокамеры, формирует карту глубины на основе определенных расстояний до объектов, строит облако точек на основе карты глубины, определяет размеры объектов на изображении и их местоположение относительно стереокамеры по облаку точек, и определяет географические координаты объектов на изображении с использованием их определенных размеров и местоположения относительно стереокамеры, а также с использованием географических координат данного устройства и направления обзора стереокамеры.
Дополнительно для определения расстояния могут использоваться характеристики объектива и видеокамеры, которые определяются в ходе внутренней и внешней калибровки камер.
Более подробно, каждая камера в паре видит предмет слегка смещенным. По известным формулам это смещение переводится в расстояние до объекта.
Карта глубины представляет собой изображение, где вместо яркости пикселя указывается расстояние до него.
Так как известно расстояние до каждой точки от камеры, можно перевести ее в 3D координаты. Соответственно, на основе карты глубины строится облако точек. Облако точек позволяет измерять размеры объектов и определять их местоположение относительно камеры.
Далее, зная географические координаты и направление камеры, можно определить географические координаты объектов в кадре.
Использование стереокамеры позволяет существенно повысить точность показаний регистратора. Сочетание стереокамеры и GNSS за счет взаимного дополнения и уточнения показаний обеспечивает повышенную точность позиционирования и распознавания фиксируемых объектов. Их сочетание с методиками, указанными в предыдущем разделе, позволяет производить дополнительные проверки и уточнения, что ещё повышает точность. Кроме того, использование стереокамеры может обеспечить увеличенное поле обзора.
Карты, собранные из облаков точек в будущем, будут полезны для беспилотного транспорта для лучшей оценки дорожной обстановки. Они дадут знания беспилотнику о дороге, которая не попадает в поле зрения его сенсоров, например, какая будет дорога за поворотом.
Направление обзора стереокамеры соответствует направлению регистратора с учетом угла поворота стереокамеры относительно оси самого регистратора. Разумеется, регистратор может быть несимметричным, и его осью может являться любая предварительно определенная линия, используемая в качестве опорной системы отсчета. При этом камера может быть зафиксирована на приборе, а объективы могут быть зафиксированы в камере, и тогда направление перемещения самого прибора-регистратора либо совпадает с направлением обзора камеры, либо всегда остается под постоянным углом относительно камеры.
В другом варианте осуществления камера может менять свое направление обзора. Например, это может производиться с помощью поворотного механизма или с помощью подстройки оптики. Таким образом можно детально отснять выбранный объект или сконцентрироваться на анализе одной из сторон автодороги. Последнее может понадобиться, например, для выявления фактов парковки в неположенных местах.
Высокая частота кадров позволяет повысить точность работы предложенного устройства. В некоторых вариантах осуществления могут использоваться программные алгоритмы преобразования частоты кадров (FRC), в частности, для повышения частоты кадров. Такие алгоритмы могут быть основаны на нейронных сетях и могут быть предварительно обученными с использованием обучающих наборов данных, специально подобранных для применения в данной местности. Процедура повышения частоты кадров может производиться как в самом регистраторе с использованием встроенной нейронной сети, так и на внешнем устройстве, таком как центр обработки данных или вычислительный модуль. Выбор компромисса между производительностью (скоростью) вычислений и точностью интерполяции кадров зависит от требований конкретного применения. При этом, если в регистраторе используется стереокамера, то съемка обеими камерами может производиться синхронно, и тогда в каждый отдельно взятый момент времени оба кадра являются либо фактически захваченными камерами, либо полученными методом интерполяции на базе FRC. Тем самым, обеспечивается высокая точность и достоверность фактически отснятого материала. В другом варианте осуществления съемка может производиться несинхронно – например, момент захвата изображений одной камерой может быть смещен на половину интервала захвата относительно другой, и тогда, если производится повышение частоты кадров в 2 раза, то в каждый отдельно взятый момент времени один кадр является фактически захваченным одной камерой, а второй кадр является интерполированным между кадрами другой камеры. Тем самым, в каждый момент времени регистратор имеет фактический снимок, который может использоваться в качестве доказательства или в качестве уточнения для параллельного интерполируемого кадра на другой камере.
Спуфинг
В настоящее время в сфере применения глобальных навигационных спутниковых систем существует в той или иной степени проявляющая себя проблема спуфинг-атак, заключающаяся в том, что злоумышленник производит подмену истинных координат приемника GNSS другими данными. Также возможно применение спуфинга государственными службами, например, для защиты стратегических объектов. Такие атаки производятся путем трансляции более сильного подложного сигнала, который «перебивает» традиционно слабый сигнал GNSS от спутников. Широко известны случаи, когда подложный сигнал указывает, например, координаты ближайшего аэропорта, то есть GNSS приемник показывает, что находится не там, где он находится на самом деле. Очевидно, что это негативным образом сказывается на точности позиционирования, и в моменты спуфинг-атак достоверность данных регистратора является низкой и не должна приниматься во внимание.
С целью борьбы со спуфингом регистратор может содержать два или более приемника GNSS, а блок навигации может выявлять спуфинг-атаки на основе определения, что по меньшей мере два приемника GNSS получили одинаковый сигнал. При применении реальных сигналов картина для всех приемников должна немного отличаться, и именно за счет этого различия и измеряются углы. Таким образом, если прибор подвергнется атаке, то истинные показатели получить будет затруднительно, но точно можно знать, что регистратор атакован. Например, в этом случае можно помечать собранную информацию как недостоверную и не выявлять нарушения по подложным данным или не присваивать объектам неправильные координаты. Блок геопозиционирования фиксируемого объекта может приостановить свою работу в случае выявления спуфинг-атаки. Наличие двух приемников позволяет также определять углы в плане.
Регистратор может дополнительно содержать встроенные часы. В случае выявления спуфинг-атаки блок определения времени фиксации может определять момент времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени только от встроенных часов. Тем самым, можно поддерживать работоспособное состояние регистратора без GNSS.
Даже если имеется только один приемник GNSS, блок навигации может принимать данные GNSS от соседнего устройства и выявления спуфинг-атаки на основе определения, что данные GNSS у данного регистратора и у соседнего устройства идентичны для заданного момента времени. Например, соседним устройством может быть другой регистратор, находящийся поблизости, или мобильный телефон водителя транспортного средства, на котором установлен регистратор, или любое другое устройство, имеющее собственный приемник GNSS и способное передавать данные проводным или беспроводным образом на регистратор.
При активной спуфинг-атаке сохраняется возможность поддерживать работоспособность регистратора с определением местоположения. Например, попавшие в кадр стационарные объекты дорожной инфраструктуры, имеющие заранее измеренное точное местоположение, могут предоставлять регистратору навигационную информацию по протоколам, отличным от GNSS. При этом привязка времени кадров к данным координатам может производиться с помощью встроенных часов. Такие стационарные объекты и их местоположение могут быть заранее известны регистратору (например, уникальные здания, памятники и т.д.), и тогда передача данных от них требуется.
В другом варианте осуществления, некоторые объекты, имеющие определенные характерные признаки (например, фонарные столбы, на которые нанесена специальная маркировка, меняющаяся по периметру в зависимости от ракурса и меняющаяся от столба к столбу), широковещательно передают данные о своем местоположении и о своих характерных признаках. Регистратор принимает эти данные и при появлении в фиксируемых кадрах этих объектов может вычислить местоположение и направление.
Если такой стационарный объект тоже содержит камеру и способен распознавать регистратор, он может знать, в какой момент времени под каким ракурсом мог его зафиксировать этот регистратор. Соответствующие данные могут быть отправлены регистратору для помощи в позиционировании.
Еще в одном варианте осуществления регистратор может определять свое местоположение по протоколам, отличным от GNSS (сотовые вышки, WiFi точки, UWB-сети и т.д.).
Указанные выше способы позиционирования могут стать не только заменой, но и дополнением или уточнением для данных GNSS.
В момент спуфинга могут фиксироваться все регистрационные знаки и прочие признаки объектов в кадре. Сопоставляя моменты спуфинга на нескольких разных регистраторах, можно попытаться выявить потенциальный источник спуфинга, если на каждом из этих кадров имеется одинаковый признак, такой как регистрационный знак. Например, если источником спуфинга является транспортное средство черного цвета с кузовом минивэн и номером А000АА00, то наличие этого транспортного средства на кадрах с 10 разных регистраторов, снятых в разные дни в момент спуфинга, неявно указывает на источник спуфинга.
Компас
Выше описывались варианты, в которых регистратор содержит 1, 2 или более приемников GNSS для различных целей. Ещё в одном варианте осуществления блок навигации регистратора может содержать по меньшей мере три приемника GNSS.
Каждый приемник GNSS при этом может быть соединен с соответствующей антенной, антенны разнесены друг от друга на фиксированное расстояние, и блок навигации может измерять углы рыскания, тангажа и крена посредством объединения показаний с упомянутых по меньшей мере трех приемников, измерять разность фаз сигналов, получаемых от GNSS, и определять направление регистратора на момент фиксации на основе величины азимута, полученной из результатов измерений. Тем самым, реализуется полноценный 3D компас, позволяющий получать точные данные о направлении регистратора без анализа изображений, что может дополнительно повысить точность показаний регистратора.
Иными словами, имеется компас с 3 антеннами, каждая антенна получает сигнал GNSS немного под разными углами от спутников. Как расположены антенны друг относительно друга, известно заранее, поэтому можно рассчитать направление поворота компаса.
Следует отметить, что эксперименты показали ограниченность применения этого метода в городских условиях. Располагаться антенны предпочтительно должны так, чтобы было видно небо. Соответственно, этот метод является опциональным и применим за городом, тогда как в городе предпочтительно использовать комбинацию GNSS и направления прибора по ключевым точкам, описанную выше.
Если мобильным объектом является транспортное средство, то по меньшей мере одна из антенн может быть закреплена на крыше транспортного средства. Тем самым, обеспечивается доступность множества спутников и высокая точность позиционирования. В альтернативном или в дополнительном варианте осуществления по меньшей мере одна из антенн может быть встроена в стекло транспортного средства. Тем самым, при сохранении видимости неба обеспечивается компактность и защита от внешних воздействий. Возможен также вариант, в котором все антенны встроены в или нанесены на лобовое стекло или заднее стекло в зоне действия стеклоочистителей. Тем самым, обеспечивается компактное и надежное решение, не требующее значительного ухода.
Антенны в компасе могут быть расположены в одной плоскости и разнесены друг от друга на расстояние около 0.5 м.
Радар
В одном из вариантов осуществления настоящего изобретения регистратор может дополнительно содержать радар, то есть радиолокационный блок, который определяет мгновенную скорость и направление фиксируемого объекта на основе эффекта Доплера, а именно, по разнице частот между радиолокационным сигналом, излученным когерентным радаром, и сигналом, отраженным от движущегося фиксируемого объекта. Подробная реализация данного блока является известной для специалистов в данной области техники и не приводится в данном документе. Такое решение позволяет повысить функциональность предложенной системы и точность измерений с учетом взаимного дополнения и/или уточнения фиксируемых данных.
Контроль нарушений, выявление изменений дорожной инфраструктуры
Система может содержать блок контроля, выполненный с возможностью определения, соответствует ли местоположение и/или направление фиксируемого объекта предварительно установленным требованиям. Блок контроля может быть частью регистратора или центра обработки данных или может быть отдельным устройством.
В одном варианте осуществления блок контроля может быть выполнен с возможностью определения параметров размещения фиксируемого объекта и/или событий, связанных с размещением фиксируемого объекта, на основе одного или более изображений фиксируемого объекта, и определения, соответствуют ли параметры размещения фиксируемого объекта и/или события, связанные с размещением фиксируемого объекта, предварительно установленным требованиям. Иными словами, такой вариант применим тогда, когда для выявления нарушения или изменения достаточно одного кадра – например, парковка в неположенном месте.
В другом варианте осуществления блок контроля может быть выполнен с возможностью определения параметров перемещения фиксируемого объекта и/или событий, связанных с перемещением фиксируемого объекта, на основе двух или более изображений фиксируемого объекта, имеющих разное время фиксации, и определения, соответствуют ли параметры перемещения фиксируемого объекта и/или события, связанные с перемещением фиксируемого объекта, предварительно установленным требованиям. Иными словами, такой вариант применим тогда, когда для выявления нарушения или изменения необходимо два или более кадра – например, опасное вождение.
Блок контроля может быть выполнен с возможностью определения параметров размещения или перемещения фиксируемого объекта и/или событий, связанных с размещением или перемещением фиксируемого объекта, на основе определения, что в разные моменты времени зафиксирован один и тот же фиксируемый объект, выполняемого на основе распознавания блоком распознавания по меньшей мере одного одинакового характерного признака фиксируемого объекта на разных зафиксированных изображениях. Иными словами, чтобы определить, что на разных кадрах имеется один и тот же объект, нужно найти на этих кадрах характерные признаки этого объекта – например, государственный регистрационный знак.
Параметры размещения фиксируемого объекта могут содержать местоположение фиксируемого объекта и/или местоположение частей фиксируемого объекта. Например, два колеса фиксируемого транспортного средства в момент фиксации находятся на тротуаре или на полосе встречного движения.
При этом вышеуказанные события, связанные с размещением фиксируемого объекта, могут содержать такие события, как остановку, стоянку, препятствование проезду транспорта, проходу пешеходов.
Параметры перемещения фиксируемого объекта могут содержать: направление перемещения фиксируемого объекта, траектория перемещения фиксируемого объекта, мгновенная скорость фиксируемого объекта, средняя скорость фиксируемого объекта, расстояние, пройденное за время между моментами фиксации, расстояние до соседних транспортных средств, пешеходов или объектов дорожной инфраструктуры.
Следует понимать, что мгновенной скоростью в физике называется величина, численно равная пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени. Очевидно, что на практике невозможно реализовать измерение за бесконечно малый промежуток времени. Например, радары, несмотря на заявленную в них функцию измерения именно «мгновенной скорости», в реальности измеряют скорость не за момент времени, а за некоторый, пусть и достаточно малый, но конечный временной интервал. Соответственно, в дополнение к данным радара (если он содержится в регистраторе) или вместо данных с радара (если он не содержится в регистраторе) в рамках настоящего изобретения в понятие измерения «мгновенной скорости» фиксируемого объекта также может входить измерение средней скорости фиксируемого объекта на основе обработки кадров за малый промежуток времени. Например, малым промежутком времени может считаться временной интервал между двумя соседними или близко расположенными по времени кадрами, снятыми камерой одного и того же регистратора, или близко расположенными по времени кадрами, снятыми на разные регистраторы. Чем ниже собственная скорость мобильного объекта, на котором расположен регистратор, тем выше точность измерений согласно такому способу. При этом слишком малый промежуток времени измерения может привести в некоторых случаях к увеличению погрешности, поэтому точное значение того, какой интервал считать достаточно малым для измерения мгновенной скорости, зависит от требований конкретного применения. Высокая частота кадров камеры и большое количество регистраторов на дороге позволяют упростить поиск оптимального решения.
События, связанные с перемещением фиксируемого объекта, могут содержать: остановку, проезд регулируемого перекрестка, проезд нерегулируемого перекрестка, пересечение пешеходного перехода, пересечение линии разметки, перестроение, обгон, перемещение по дороге или вне её.
Если одни и те же события и/или параметры в одни и те же или близкие моменты времени зафиксированы разными регистраторами, то данные с разных регистраторов могут использоваться для взаимного дополнения и/или уточнения. Например, если заданный малый промежуток времени, за который произведено измерение мгновенной скорости фиксируемого транспортного средства одним регистратором, по меньшей мере частично перекрывается с малым промежутком времени, за который произведено измерение мгновенной скорости того же самого фиксируемого транспортного средства другим регистратором, то данные с этих регистраторов могут использоваться для уточнения как местоположения и скорости фиксируемого транспортного средства, так и местоположения и скорости самих регистраторов.
Таким образом, обеспечивается возможность регистрации широкого спектра параметров и событий, связанных с фиксируемыми объектами, с высокой точностью.
Дополнительные варианты осуществления
С целью увеличения точности позиционирования блок навигации также может получать поправки от базовой станции. Поправки могут быть реализованы, например, согласно системе дифференциальной коррекции, такой как технология Real Time Kinematic (кинематика реального времени). Это позволяет достичь точности позиционирования 3-5 см и лучше при точности синхронизации 5 мс и лучше.
Система может дополнительно содержать вычислительный модуль (ВМ), который представляет собой компьютерное средство и содержит память (блок хранения карты) и блок определения местоположения.
В одном из вариантов осуществления ВМ содержит карту с профилем автодорог, построенную с сантиметровой точностью с помощью технологии Real Time Kinematic.
В одном из вариантов осуществления ВМ может располагаться как в удаленном Дата-центре, так и непосредственно у дороги, в том числе в составе регистратора.
В памяти ВМ хранятся карты с профилем автодорог, предварительно построенные с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции.
Данные, полученные от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации, а также от других блоков, могут сохраняться в памяти регистратора (блоке хранения данных) в неизменном виде или в виде метаданных.
На основе данных, полученных от блока навигации, блока фиксации, блока распознавания и блока определения времени фиксации блок формирования метаданных формирует метаданные по каждому зафиксированному транспортному средству. Это позволяет снизить требования к объему памяти и к пропускной способности канала связи.
Метаданные могут быть переданы с помощью передатчика данного регистратора в центр обработки данных, на вычислительный модуль и/или на другой регистратор с помощью стандартных (GPRS, 3G, 4G, WiFi, Bluetooth, RFID, Zigbee и т.д.) или проприетарных протоколов передачи данных.
Приемник может принимать другие метаданные от центра обработки данных, от вычислительного модуля и/или от другого регистратора.
Пользуясь профилем автодороги, сохраненным в памяти, блок определения местоположения может строить проекцию географических координат, которые были определены блоком навигации регистратора в момент фиксации изображения фиксируемого объекта, на этом профиле. В частности, проекция может строиться по нормали, то есть по кратчайшему расстоянию между определенными координатами регистратор и профилем автодороги.
Тем самым, даже если местоположение регистратора в пространстве не было достаточно точно определено вследствие того, что мобильный объект движется, его блок навигации не имеет в конкретный момент достаточного количества видимых спутников из-за плотной городской застройки, или вследствие других негативных факторов, таких как плохие метеоусловия, помехи, отражение сигнала и т.д., то вычисление проекции на профиле дороги позволяет сократить ошибку и более точно определить, где именно на дороге находится мобильный объект с регистратором. За счет этого появляется возможность не фиксировать регистратор в одной точке, а использовать регистратор на мобильном объекте, движущемся с относительно высокой скоростью, сопоставимой со скоростью потока транспортных средств на автодороге.
Центр обработки данных снабжен функциями приема, обработки, передачи и хранения метаданных о фиксации транспортных средств и выявления нарушений транспортными средствами правил дорожного движения на основе упомянутых метаданных. Например, центр обработки данных может выявлять нарушение скорости движения или нарушение правил расположения транспортных средств. То есть блок контроля может содержаться в центре обработки данных.
В другом варианте блок контроля может быть частью вычислительного модуля.
В одном из вариантов осуществления прибором для построения профиля автодороги может быть сам регистратор, то есть он предварительно может проехать по требуемой дороге, если карта её профиля ранее не была сохранена в его памяти или в базе данных центра обработки данных или её требуется обновить, произведя объезд с относительно малой скоростью (в целях увеличения точности), может построить высокоточную карту профиля автодорог и сохранить её у себя в памяти, а затем перейти непосредственно к мобильному контролю движения в рамках карты построенного участка и тех карт, которые у него уже есть в памяти. Соответственно, картографическая база данных может быть построена постепенно в процессе эксплуатации таких регистраторов, и нет необходимости получать уже готовую карту.
Данная методика позволяет регистраторам транспортных средств располагаться в любой точке дороги, которая прошла предварительный обмер, и высокоточно измерять расстояние между двумя произвольно расположенными вдоль профиля автодороги координатами. Тем самым, облегчается оперативное перемещение регистраторов на другие позиции в рамках предварительно построенного профиля без необходимости физического измерения курвиметром или другими измерительными приборами. Также данная методика позволяет регистраторам транспортных средств располагаться на движущихся средствах и измерять скорость в движении. Работа регистраторов возможна в любых точках профиля автодороги и проходит в автоматическом режиме с непрерывной съемкой дороги. Регистраторы фиксируют ТС, могут определять среднюю скорость движения ТС между двумя приборами. Также формируют метаданные по каждому проезду ТС (время фиксации, местоположение прибора, тип ТС, марка ТС, модель ТС и другие метаданные). Регистраторы могут работать с использованием и без использования центров обработки данных (Вычислительных центров).
Вычислительный модуль может быть расположен в центре обработки данных, внутри регистратора или может быть отдельным устройством, расположенным, например, непосредственно у дороги. Соответственно, регистратор может либо вообще не пользоваться картой профиля дорог, поручив соответствующую обработку данных вычислительному модулю, либо может получить на месте от расположенного поблизости вычислительного модуля ранее неизвестную ему карту профиля автодорог. Также регистратор может обновлять карту, ранее сохраненную в ВМ.
Расстояние между проекциями может вычисляться с учетом траектории движения между ними согласно карте профиля. Это позволяет увеличить точность определения расстояния.
Предпочтительно выбирается кратчайшая траектория движения, так как в таком случае полученная средняя скорость является наименьшей, что позволяет трактовать полученные сведения в пользу водителей ТС, особенно в пользу тех, которые действительно ехали по этой траектории, не превышая допустимую скорость.
Карта профиля автодорог может дополнительно содержать данные о зонах, содержащих ограничения касательно расположения или движения на них транспортных средств. Такими зонами могут быть как непосредственно автодороги, так и автостоянки и иные территории, в том числе прилегающие территории (такую карту в общем случае можно назвать картой профиля местности). Например, в карте может содержаться информация о рядности дороги, наличии автобусных полос, озелененных территориях, парковочных зонах, скоростном режиме и др. Данная информация может пополняться в ручном режиме (операторами системы) и в автоматическом за счет данных работы регистраторов. В таком случае траектория движения между проекциями вычисляется с учетом возможных ограничений и запретов. Это позволяет увеличить точность определения расстояния и потенциально выявлять те ТС, водители которых двигались по запрещенным траекториям в целях более быстрого преодоления расстояния между моментами фиксации.
Упоминавшееся выше указание, что мобильный объект, на котором установлен регистратор, может находиться и перемещаться «вблизи автодороги», в рамках данного изобретения означает, что мобильный объект в момент съемки располагается и перемещается в пределах зоны, для которой имеется предварительно построенная карта профиля местности, на таком расстоянии от дороги и/или от фиксируемого транспортного средства, в пределах которого доступно точное позиционирование согласно настоящему изобретению и получение изображений приемлемого качества, то есть пригодных для получения всей требуемой информации о фиксируемом транспортном средстве, такой как государственный регистрационный знак, а также при необходимости расстояние и угол до фиксируемого транспортного средства, его направление, марку, тип и т.д. Например, если для обочины или тротуара имеется карта профиля местности, контролирующее транспортное средство, такое как велосипед с установленным на него регистратор, может в процессе съемки перемещаться по обочине или тротуару.
Еще в одном варианте может производиться оценка, могло ли теоретически одно и то же ТС оказаться в разных местах в разное время фиксации. Например, если между моментами фиксации разными регистратор транспортного средства с одними и теми же регистрационными знаками на расстоянии 2 км прошло 5 секунд, то понятно, что одно и то же ТС не могло преодолеть такое расстояние за такое время. Соответственно, вместо определения нарушения средней скорости в данном случае имеет место нарушение, связанное с использованием поддельных регистрационных знаков. Это позволяет повысить точность выявления нарушений и выявлять иные опасные нарушения.
Блок определения местоположения в регистраторе или в ВМ может также определять местоположение самого фиксируемого транспортного средства на основе карты, полученных изображений и местоположения мобильного объекта на автодороге. Данные изображения могут позволить измерить расстояние и угол относительно регистратора до фиксируемого транспортного средства. Прибавив эти величины к координатам мобильного объекта, получаем местоположение фиксируемого транспортного средства. Поскольку методы определения расстояния по изображению могут быть в некоторых случаях недостаточно точными, может выполняться проецирование полученного местоположения фиксируемого транспортного средства на карту профиля автодорог. Таким образом, выполняется высокоточное позиционирование фиксируемых транспортных средств, а не только самого устройства, что значительно повышает точность определения местоположения фиксируемого транспортного средства, а также позволяет использовать мобильный вариант регистратор для автоматического выявления нарушений, связанных с расположением ТС.
Как указывалось выше, определение скорости и выявление нарушений может выполняться удаленным центром обработки данных. В другом варианте осуществления регистратор может самостоятельно выполнять эти действия.
Регистратор может дополнительно содержать блок определения средней скорости, выполненный с возможностью: определения, что в разные моменты времени зафиксировано одно и то же фиксируемое транспортное средство; определения разницы во времени между упомянутыми моментами фиксации для фиксируемого транспортного средства; определения расстояния между местоположениями мобильного объекта на автодороге в упомянутые моменты фиксации; и определения средней скорости фиксируемого транспортного средства на участке между упомянутыми моментами фиксации на основе упомянутых определенных разницы во времени и расстояния.
В таком случае нет необходимости связи с удаленным центром обработки данных. В одном из вариантов удаленный центр обработки данных может вообще не использоваться в такой системе. Это увеличивает автономность регистратора и снижает сложность системы.
Определение средней скорости может выполняться только тогда, когда разница во времени между фиксациями больше или равна пороговой разнице или расстояние между фиксациями больше или равно пороговому расстоянию. В случае, когда ведется непрерывная съемка, один и тот же регистратор может получить множество последовательных изображений с одним и тем же ТС. Точность измерений средней скорости за малый интервал времени и за малое пройденное расстояние в некоторых случаях может быть относительно низкой, поэтому может вводиться ограничение на минимальный временной промежуток между фиксациями или на расстояние между ними. Также это позволяет снизить нагрузку на вычислительные средства, чтобы они не производили лавинные вычисления между каждой парой из множества фиксаций транспортного средства, полученных за короткий промежуток.
С другой стороны, несколько фиксаций транспортного средства, полученных за короткий промежуток (временной или пространственный), могут быть использованы для усреднения местоположения данного транспортного средства на автодороге. Это еще больше может повысить точность определения местоположения фиксируемых транспортных средств и точность выявления связанных с этим нарушений. Соответственно, далее может определяться проекция усредненного местоположения фиксируемого транспортного средства на профиле автодороги в целях повышения точности позиционирования.
Примеры
Фиксация местоположения дорожной инфраструктуры, например, дорожных знаков, фонарных столбов, километровых столбиков и т.п. может быть использована, например, для оценки показателей безопасности различных участков автодорог, когда требуется составить описание различных элементов автодороги (сколько полос движения, если бордюры, разделены ли встречные полосы, какая ширина обочины, какие дорожные знаки установлены, на сколько просматривается дорога, есть ли массивные объекты около дороги и тп). По этим размеченным данным можно выделить группы однотипных участков автодорог (кластеры), сопоставить их с данными о ДТП и проанализировать, как изменить дорогу, чтобы ДТП на ней стало меньше. Параллельно решается вопрос учета/контроля наличия/контроля изменений дорожной инфраструктуры.
На Фиг. 2 показан пример работы комплекса мобильных регистраторов для случая определения средней скорости движения транспортного средства. МК — мобильный комплекс (регистратор, установленный на мобильный объект). Н — потенциальный нарушитель (фиксируемое транспортное средство). В этом случае мобильные комплексы осуществляют по пути точное позиционирование транспортного средства (ТС), фиксируют государственный регистрационный знак, координаты и время.
Момент 1. Нарушитель (Н) обгоняет мобильный комплекс (МК1).
Момент 2. МК1 осуществляет точное позиционирование Н и фиксирует координату (S1), время (t1), направление и ГРЗ.
Момент 3. Нарушитель (Н) продолжает движение и попадает в поле зрения МК2.
Момент 4. МК2 осуществляет точное позиционирование Н и фиксирует координату (S2), время (t2), направление и ГРЗ.
Момент 5. Данные с МК1 и МК2 доставляются на управляющий сервер, где идет расчет скорости движения: v=(S2-S1)/(t2-t1).
В данном случае используется два регистратор (МК1 и МК2) и удаленный центр обработки данных (управляющий сервер).
Выше указывалось, что в разные моменты времени одно и то же фиксируемое транспортное средство может быть зафиксировано разными регистраторами. В другом варианте осуществления в разные моменты времени одно и то же фиксируемое транспортное средство может быть зафиксировано одним и тем же регистратором. Если между моментами фиксации прошло достаточно времени, или пройдено достаточное расстояние, или в достаточной мере сменился ракурс обзора, регистратор может произвести оценку тех или иных нарушений фиксируемым транспортным средством, если для оценки требуется два или более кадров. Это еще больше увеличивает автономность регистратора.
На Фиг. 3 показан пример работы комплекса мобильных регистраторов для случая выявления нарушения правил расположения.
Момент 1. Нарушитель (Н1) обгоняет мобильный комплекс (МК) по встречной полосе.
Момент 2. МК проезжает мимо другого нарушителя (Н2), двигающегося по автобусной полосе (выделенной полосе для общественного транспорта, или иной полосе с выделенным движением транспортных средств).
Момент 3. МК определяет точные координаты Н1 и Н2, фиксирует время, направление и скорость движения, распознает номерной знак, осуществляет фото-, видеосъемку событий.
Момент 4. Данные с МК доставляются в диспетчерский центр, где идет проверка возможности нахождения Н1 и Н2 в данной координате.
В данном случае используется один регистратор (МК) и удаленный центр обработки данных (диспетчерский центр), где полученные автоматически сведения о нарушении могут дополнительно проверяться диспетчером.
Встречная полоса:
1. Определяется местоположение/координата транспортного средства (ТС) в 2 последовательных моментах времени, например, с разницей в 0.1 сек.
2. Определяется направление движения ТС по изменению его координат
3. Получаются от информационной системы данные о допустимом направлении движения в данных координатах.
4. Сопоставляются допустимое направление движения с направлением движения ТС
5. Если они разные – выявляется нарушение.
Доказательством является видеоролик, фиксирующий факт движения ТС. Может потребоваться, чтобы на видео была видна сплошная полоса разметки, как подтверждение невозможности выезда на встречную полосу.
Нарушение правил остановки и стоянки:
1. Один прибор определяет местоположение/координату ТС в некий момент времени
2. Получаются от информационной системы данные о допустимости остановки в данных координатах.
3. Какое-то время спустя, например, через 5 минут, проезжает другой прибор мимо данной координаты и проверяет, по-прежнему ли то самое ТС там стоит.
4. Если да – выявлено нарушение.
Доказательство - 2 фото в моменты времени 1 и 2, при этом желательно, чтобы в кадр попал элемент дорожной разметки, препятствующей остановке.
Поворот не с того ряда:
1. В потоке есть 1 или несколько автомобилей, каждый из которых фиксирует координаты ТС с некоторой периодичностью, например, 1 раз в секунду.
2. Получается набор координат и связанные с ним временные метки перемещения ТС, по нему строится траектория движения ТС.
3. Получаются от информационной системы данные о допустимых траекториях движения, например, может быть запрещен поворот налево.
4. Если траектория противоречит допустимым нормам – выявлено нарушение.
Доказательство - серия фото с одного или нескольких приборов.
При высоком уровне насыщения такими регистраторами, особенно в случае обязательного оснащения ими автомобилей, можно добиться тотального контроля таких нарушений, как выезд на встречную полосу, поворот не с того ряда, опасное вождение, превышение установленной скорости движения. Однако, даже внедрив их в небольшое количество транспортных средств, которые совершают регулярные или маршрутные поездки, можно создать ощущение повсеместного контроля: любая машина в потоке может оказаться прибором контроля соблюдения ПДД. В этом случае, даже в отсутствии полного покрытия видеокамерами автодорог, обеспечится контроль наиболее опасных правонарушений.
В том числе ожидается смена поведенческой модели водителя, побуждая его соблюдать правила дорожного движения на всем пути следования: «Не буду нарушать, ведь любой автомобиль в потоке может это зафиксировать». Таким образом, предложенная система позволяет увеличить безопасность дорожного движения.
Архитектура сети
В одном из вариантов осуществления, некоторые блоки по отдельности или вместе могут представлять собой, например, компьютер, и включать в себя процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков в соответствии с вариантами осуществления настоящего изобретения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор.
Система может содержать Диспетчерский центр (далее ДЦ) – специальное программное обеспечение, осуществляющее сбор и обработку информации с регистраторов посредством защищенных каналов связи на базе каналов передачи данных операторов сотовой связи (3G, 4G, в перспективе 5G). Каждый регистратор при старте идентифицируется в ДЦ. После чего периодически передает информацию о своем местоположении, местоположении зафиксированных транспортных средств и выявленных дорожных событиях. ДЦ анализирует эту информацию и собирает данные по фиксации одного и того же события с разных регистраторов.
Поскольку в данную систему входят сотни и даже тысячи регистраторов, на ДЦ накладываются повышенные требования по производительности, масштабируемости и отказоустойчивости. Поэтому в ДЦ предлагается организовать шину событий и организовать конвейер обработки данных.
Ключевыми особенностями ДЦ являются:
Микросервисная архитектура, конвейерная обработка информации
Работа с любым провайдером облачных вычислений
Автоматическое наращивание и высвобождение вычислительных ресурсов
Автоматическое восстановление работы системы при программных и аппаратных поломках
Общий принцип обработки в ДЦ - конвейер. Имеется набор небольших программ (сервисов), каждый из которых решает свою небольшую задачу. Выходные данные одного сервиса становятся входными данными для другого. При этом обмен идет не через базу данных, а напрямую через конвейер. Это позволяет добиваться повышенной производительности при обработке больших данных. Это является эффективным подходом к построению высоконагруженных информационных систем.
Например, для измерения средней скорости могут быть следующие сервисы (несколько упрощенная схема):
1. Загрузка пакетов данных с приборов (пакет содержит информацию о серии проездов ТС за определенный промежуток времени)
2. Линковка (объединение в пары пакетов, в которых может быть измерена скорость) пакетов данных с приборов
3. Парсинг пакетов данных с приборов (разбор формата данных, в котором хранятся
4. Линковка проездов и измерение скорости проезда
Каждый сервис работает независимо. Загрузчик пакетов получает пакет и не ждет, когда его обработают, а просто отправляет его в конвейер и идет загружать следующий. У каждого сервиса может быть множество экземпляров. Например, одновременно могут работать 10 загрузчиков пакетов. За счет этого достигается масштабирование.
Если требуется провести какую-нибудь дополнительную аналитику данных, кроме расчета скорости, в конвейер может быть включен соответствующий сервис.
Выявление различных событий (движение по определенной полосе, выход пешехода на пешеходный переход, перестроение и др.) и объектов (транспортные средства, пешеходы, дорожная инфраструктура и др) и их классификацию, распознавание государственных регистрационных знаков и лиц пешеходов предполагается реализовывать с применением нейронных сетей. Такие задачи требуют специфических вычислений. Для повышения производительности и обеспечения работы в режиме реального времени вычислительный модуль регистратора может быть оснащен нейронным сопроцессором.
По меньшей мере, один из этапов в способе или блоков в устройстве может использовать модель искусственного интеллекта (AI) для выполнения соответствующих операций. Функция, связанная с AI, может выполняться через энергонезависимую память, энергозависимую память и процессор.
Процессор может включать в себя один или несколько процессоров. В то же время, один или несколько процессоров могут быть процессором общего назначения, например центральным процессором (CPU), прикладным процессором (AP) или т.п., блоком обработки только графики, таким как графический процессор (GPU), визуальный процессор (VPU) и/или специализированный процессор AI, такой как нейронный процессор (NPU).
Один или несколько процессоров управляют обработкой входных данных в соответствии с заранее определенным правилом работы или моделью искусственного интеллекта (AI), хранящейся в энергонезависимой памяти и энергозависимой памяти. Предварительно определенное рабочее правило или модель искусственного интеллекта могут быть получены путем обучения. При этом процессор может выполнять операцию предварительной обработки данных для преобразования в форму, подходящую для использования в качестве входных данных для модели искусственного интеллекта.
«Получена путем обучения» означает, что посредством применения алгоритма обучения к множеству обучающих данных создается предварительно определенное рабочее правило или модель AI с желаемой характеристикой. Обучение может выполняться на самом устройстве, в котором выполняется AI согласно варианту осуществления, и/или может быть реализовано через отдельный сервер/систему.
Модель искусственного интеллекта может включать в себя множество слоев нейронной сети. Каждый из множества слоев нейронной сети включает в себя множество весовых значений и выполняет рабочую операцию для данного уровня путем вычисления между результатом вычисления предыдущего слоя и множеством весовых значений.
Примеры нейронных сетей включают, помимо прочего, сверточную нейронную сеть (CNN), глубокую нейронную сеть (DNN), рекуррентную нейронную сеть (RNN), ограниченную машину Больцмана (RBM), глубокую сеть доверия (DBN), двунаправленную рекуррентную глубокую нейронную сеть (BRDNN), генеративно-состязательные сети (GAN) и глубокие Q-сети.
Алгоритм обучения - это метод обучения предварительно определенного целевого устройства (например, нейронной сети на базе GPU) с использованием множества обучающих данных, чтобы вызывать, разрешать или управлять целевым устройством для выполнения определения или прогнозирования. Примеры алгоритмов обучения включают, но не ограничиваются ими, обучение с учителем, обучение без учителя, обучение с частичным привлечением учителя или обучение с подкреплением.
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства(PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Энергонезависимой памятью может быть постоянное запоминающее устройство (ROM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электронно-стираемое программируемое постоянное запоминающее устройство (EEPROM) или флэш-память. Энергозависимая память может быть оперативной памятью (RAM). Также память в вариантах осуществления настоящего раскрытия может быть статической памятью с произвольным доступом (SRAM), динамической памятью с произвольным доступом (DRAM), синхронной динамической памятью с произвольным доступом (синхронная DRAM, SDRAM), синхронной динамической памятью с произвольной выборкой с двойной скоростью передачи данных (SDRAM с двойной скоростью передачи данных, DDR SDRAM), синхронной динамической памятью с произвольной выборкой с повышенной скоростью (улучшенная SDRAM, ESDRAM), DRAM с синхронной линией связи (SLDRAM) и оперативной памятью с шиной прямого доступа (DR RAM) и тд. То есть память в вариантах осуществления настоящего раскрытия включает в себя, но не ограничивается этим, эти и любые другие подходящие типы памяти.
Информация и сигналы, описанные в данном документе, могут представляться с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут приводиться в качестве примера в вышеприведенном описании, могут представляться посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного.
Функции, описанные в данном документе, могут реализовываться в аппаратных средствах, программном обеспечении, выполняемом посредством процессора, микропрограммном обеспечении или в любой комбинации вышеозначенного. При реализации в программном обеспечении, выполняемом посредством процессора, функции могут сохраняться или передаваться как одна или более инструкций или код на компьютерно-читаемом носителе. Другие примеры и реализации находятся в пределах объема раскрытия настоящего изобретения. Например, вследствие характера программного обеспечения, функции, описанные выше, могут реализовываться с использованием программного обеспечения, выполняемого посредством процессора, аппаратных средств, микропрограммного обеспечения, фиксированного блока или комбинаций любого из вышеозначенного. Признаки, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях.
Компьютерно-читаемые носители включают в себя как некратковременные компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы из одного места в другое. Некратковременный носитель хранения данных может представлять собой любой доступный носитель, к которому можно осуществлять доступ посредством компьютера общего назначения или специального назначения. В качестве примера, а не ограничения, некратковременные компьютерно-читаемые носители могут содержать оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, ROM на компакт-дисках (CD) или другое устройство хранения данных на оптических дисках, устройство хранения данных на магнитных дисках или другие магнитные устройства хранения, либо любой другой некратковременный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера общего назначения или специального назначения либо процессора общего назначения или специального назначения.
Применение
Устройства и системы согласно настоящему изобретению можно использовать на объектах дорожно-транспортной инфраструктуры.
Согласно настоящему изобретению предложен новый тип встраиваемого в транспортное средство устройства анализа и контроля дорожной обстановки с возможностью высокоточного позиционирования (сантиметровая точность) окружающих объектов и сопоставления информации с данными геоинформационной системы. Все приборы могут быть объединены в единую информационную систему для получения полной картины о дорожной обстановке. Это позволит выявлять недоступные в данный момент для автоматического контроля нарушения правил дорожного движения.
Имеются значительные перспективы в объединении информационного пространства разрабатываемой системы с интеллектуальными транспортными системами (ИТС). Такая интеграция с одной стороны позволит передавать актуальные данные в ИТС о передвижении транспортных средств, их скорости, направлении движения для построения более точной модели перемещения транспортных потоков и распознанных дорожных знаках и разметки для контроля состояния дорожной инфраструктуры. С другой стороны, от ИТС будет получаться информация о действующих ограничениях на дороге, в том числе текущая фаза работы «умных» светофоров, значения с динамических дорожных знаков и тп. Для этого в рамках конвейера обработки данных ДЦ будут реализованы соответствующие сервисы обмена информацией.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
В одном варианте осуществления элементы/блоки/модули предложенного устройства находятся в общем корпусе, могут быть размещены на одной раме/конструкции/печатной плате и связаны друг с другом конструктивно посредством монтажных (сборочных) операций и функционально посредством линий связи. Упомянутые линии или каналы связи, если не указано иное, являются стандартными, известными специалистам линиями связи, материальная реализация которых не требует творческих усилий. Линией связи может быть провод, набор проводов, шина, дорожка, беспроводная линия связи (индуктивная, радиочастотная, инфракрасная, ультразвуковая и т.д.). Протоколы связи по линиям связи известны специалистам и не раскрываются отдельно.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Конструктивное исполнение элементов предложенного устройства является известным для специалистов в данной области техники и не описывается отдельно в данном документе, если не указано иное. Элементы устройства могут быть выполнены из любого подходящего материала. Эти составные части могут быть изготовлены с использованием известных способов, включая, лишь в качестве примера, механическую обработку на станках, литьё по выплавляемой модели, наращивание кристаллов. Операции сборки, соединения и иные операции в соответствии с приведенным описанием также соответствуют знаниям специалиста в данной области и, таким образом, более подробно поясняться здесь не будут.
В заявке не указано конкретное программное и аппаратное обеспечение для реализации блоков и модулей предложенного устройства (например, блока определения средней скорости), но специалисту в области техники должно быть понятно, что сущность изобретения не ограничена конкретной программной или аппаратной реализацией, и поэтому для осуществления изобретения могут быть использованы любые программные и аппаратные средства, известные в уровне техники. Так, аппаратные средства могут быть реализованы в одной или нескольких специализированных интегральных схемах, цифровых сигнальных процессорах, устройствах цифровой обработки сигналов, программируемых логических устройствах, программируемых пользователем вентильных матрицах, процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, выполненных с возможностью осуществлять описанные в данном документе функции, компьютер либо комбинации вышеозначенного.
Специалисту в области техники должно быть также понятно, что, когда речь идет о хранении данных, программ и т.п., подразумевается наличие машиночитаемого носителя данных, примеры машиночитаемых носителей данных включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Хотя выше в явном виде не описывался способ для регистрации дорожной обстановки, этапы данного способа могут быть выявлены специалистом исходя из функций, выполняемых посредством вышеупомянутых устройств, блоков и модулей.
Примерные варианты осуществления обеспечивают устройства, состоящие из различных блоков и модулей, обеспечивающих функциональность для выполнения этапов способов. Блоки и модули могут быть реализованы как аппаратные средства (воплощенные в одном или нескольких чипах, включая интегральную схему, такую как специализированная интегральная схема) или могут быть реализованы как программное обеспечение или прошивка для исполнения процессором. В частности, в случае прошивки или программного обеспечения, примерные варианты осуществления могут обеспечиваться как компьютерный программный продукт, включающий в себя считываемый компьютером запоминающий носитель, воплощающий в себе компьютерный программный код (т.е., программное обеспечение или прошивку) для исполнения компьютерным процессором. Считываемый компьютером запоминающий носитель может быть долговременным (например, магнитные диски, оптические диски, постоянная память, устройства флэш-памяти, память с фазовым изменением). Связь процессора/контроллера и других компонентов обычно осуществляется через одну или несколько шин или мостов (также называемых контроллерами шин). Память данного электронного устройства обычно хранит код и/или данные для исполнения на наборе из одного или нескольких процессоров этого электронного устройства, такого как контроллер. Коды могут предписывать процессору выполнять этапы способа или функции устройства.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ОБЪЕКТОВ В ОБЛАСТИ АВТОДОРОГИ | 2021 |
|
RU2770145C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2736930C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Система автоматической видеофиксации дорожно-транспортных происшествий на перекрестке | 2021 |
|
RU2769832C1 |
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ФОТОВИДЕОРЕГИСТРАЦИИ ПРАВОНАРУШЕНИЙ | 2019 |
|
RU2731455C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2801076C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОВЕДЕНИЯ ЭКЗАМЕНА НА ПРАВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2021 |
|
RU2793073C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СРЕДНЕЙ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606521C1 |


Изобретение относится к области интеллектуальных транспортных систем. Устройство для регистрации дорожной обстановки, выполненное с возможностью перемещения в области автодороги или вблизи нее, содержит: блок фиксации, содержащий камеру и выполненный с возможностью фиксации изображения фиксируемого объекта, находящегося в поле обзора блока фиксации, блок распознавания, выполненный с возможностью распознавания по меньшей мере одного характерного признака фиксируемого объекта на основе зафиксированного изображения, блок навигации, выполненный с возможностью определения географических координат и направления данного устройства и синхронизации времени по меньшей мере на основе данных, принимаемых от глобальной навигационной спутниковой системы, блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени от блока навигации и блок геопозиционирования фиксируемого объекта, выполненный с возможностью определения местоположения и направления фиксируемого объекта на момент фиксации на основе изображения фиксируемого объекта и данных от блока навигации. Достигается повышение точности позиционирования. 2 н. и 41 з.п. ф-лы, 3 ил.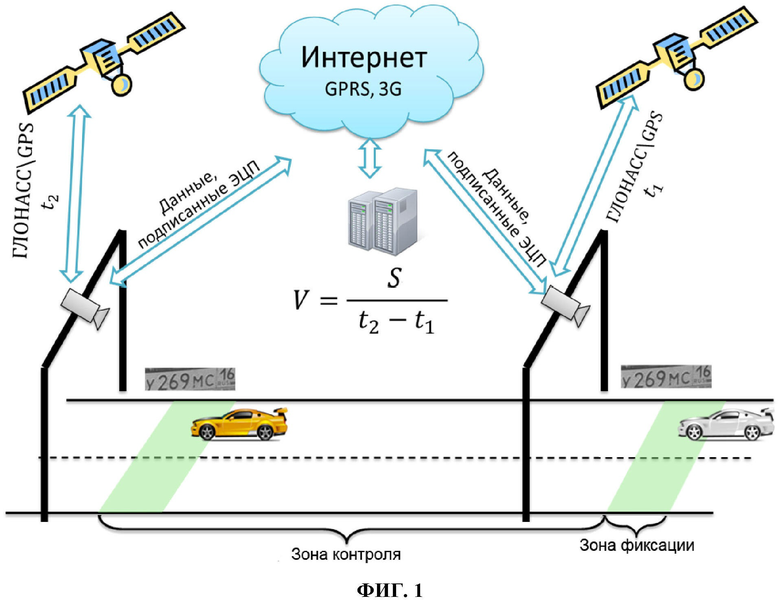
1. Устройство для регистрации дорожной обстановки, выполненное с возможностью перемещения в области автодороги или вблизи нее и содержащее:
блок фиксации, содержащий камеру и выполненный с возможностью фиксации изображения фиксируемого объекта, находящегося в поле обзора блока фиксации;
блок распознавания, выполненный с возможностью распознавания по меньшей мере одного характерного признака фиксируемого объекта на основе зафиксированного изображения;
блок навигации, выполненный с возможностью определения географических координат и направления данного устройства и синхронизации времени по меньшей мере на основе данных, принимаемых от глобальной навигационной спутниковой системы (GNSS);
блок определения времени фиксации, выполненный с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени от блока навигации; и
блок геопозиционирования фиксируемого объекта, выполненный с возможностью определения местоположения и направления фиксируемого объекта на момент фиксации на основе изображения фиксируемого объекта и данных от блока навигации.
2. Устройство по п. 1, в котором направлением является направление, в котором перемещается или в которое обращено данное устройство или фиксируемый объект.
3. Устройство по п. 1, причем данное устройство установлено на мобильный объект, выполненный с возможностью перемещения в области автодороги или вблизи нее.
4. Устройство по п. 3, причем мобильным объектом, на которое установлено данное устройство, является контролирующее транспортное средство, беспилотный аппарат, человек или животное.
5. Устройство по п. 1, причем фиксируемым объектом является транспортное средство, человек, элемент дорожной инфраструктуры, элемент окружающей среды.
6. Устройство по п. 5, причем дорожная инфраструктура содержит дорожное покрытие, разметку, обочины, разделительные полосы, ограждения, освещение, дорожные знаки, светофоры.
7. Устройство по п. 5, причем окружающая среда содержит здания, сооружения, растения.
8. Устройство по п. 1, в котором по меньшей мере один характерный признак фиксируемого объекта содержит по меньшей мере одно из
- размера в целом или размера отдельных частей фиксируемого объекта,
- типа фиксируемого объекта,
- государственного регистрационного знака, типа, марки или модели фиксируемого транспортного средства,
- лица или частей тела фиксируемого человека.
9. Устройство по п. 1, дополнительно содержащее
блок обнаружения ключевых точек, выполненный с возможностью обнаружения на нескольких изображениях одинаковых элементов, которые хорошо различимы на разных кадрах,
причем блок навигации дополнительно выполнен с возможностью определения смещения одинаковых элементов относительно предыдущего кадра и определения направления данного устройства на основе результатов определения.
10. Устройство по п. 1, в котором, если на зафиксированном изображении распознано несколько неподвижных объектов, для которых заранее известно их точное местоположение и реальные размеры, блок навигации выполнен с возможностью определения местоположения данного устройства дополнительно на основе сопоставления размеров каждого из этих объектов с их реальными размерами и сопоставления взаимного расположения этих объектов относительно друг друга и относительно данного устройства.
11. Устройство по п. 1, в котором камера является стереокамерой,
причем устройство дополнительно содержит:
блок картографирования, выполненный с возможностью:
- определения расстояния до объектов на зафиксированном изображении на основе расстояния между объективами стереокамеры,
- формирования карты глубины на основе определенных расстояний до объектов,
- построения облака точек на основе карты глубины,
- определения размеров объектов на изображении и их местоположения относительно стереокамеры по облаку точек,
- определения географических координат объектов на изображении с использованием их определенных размеров и местоположения относительно стереокамеры, а также с использованием географических координат данного устройства и направления обзора стереокамеры.
12. Устройство по п. 11, в котором направление обзора стереокамеры соответствует направлению данного устройства с учетом угла поворота стереокамеры относительно данного устройства.
13. Устройство по п. 3, в котором блок навигации содержит по меньшей мере два приемника GNSS,
каждый приемник GNSS выполнен с возможностью соединения с соответствующей антенной,
антенны разнесены друг от друга на фиксированное расстояние.
14. Устройство по п. 13, причем мобильным объектом является транспортное средство,
по меньшей мере одна из антенн встроена в стекло транспортного средства и/или по меньшей мере одна из антенн закреплена на крыше транспортного средства.
15. Устройство по п. 13, причем мобильным объектом является транспортное средство,
все антенны встроены в или нанесены на лобовое стекло или заднее стекло в зоне действия стеклоочистителей.
16. Устройство по п. 13, причем мобильным объектом является транспортное средство,
антенны расположены в одной плоскости и разнесены друг от друга на расстояние около 0.5 м.
17. Устройство по любому из пп. 13-16, в котором блок навигации содержит по меньшей мере три приемника GNSS,
блок навигации выполнен с возможностью измерения углов рыскания, тангажа и крена посредством объединения показаний с упомянутых по меньшей мере трех приемников, измерения разности фаз сигналов, получаемых от GNSS, и определения направления данного устройства на момент фиксации на основе результатов измерений.
18. Устройство по п. 17, в котором блок навигации выполнен с возможностью определения направления данного устройства на момент фиксации на основе величины азимута, полученной из результатов измерений.
19. Устройство по любому из пп. 13-16, в котором блок навигации выполнен с возможностью выявления спуфинг-атаки на основе определения, что по меньшей мере два приемника GNSS получили одинаковый сигнал.
20. Устройство по п. 19, дополнительно содержащее встроенные часы,
причем в случае выявления спуфинг-атаки блок определения времени фиксации дополнительно выполнен с возможностью определения момента времени, в который было зафиксировано изображение фиксируемого объекта, на основе данных о времени только от встроенных часов.
21. Устройство по п. 19, в котором блок геопозиционирования фиксируемого объекта дополнительно выполнен с возможностью приостановки своей работы в случае выявления спуфинг-атаки.
22. Устройство по п. 1, дополнительно содержащее блок контроля, выполненный с возможностью определения, соответствует ли местоположение и/или направление фиксируемого объекта предварительно установленным требованиям.
23. Устройство по п. 1, дополнительно содержащее блок контроля, выполненный с возможностью определения параметров размещения фиксируемого объекта и/или событий, связанных с размещением фиксируемого объекта, на основе одного или более изображений фиксируемого объекта и определения, соответствуют ли параметры размещения фиксируемого объекта и/или события, связанные с размещением фиксируемого объекта, предварительно установленным требованиям.
24. Устройство по п. 1, дополнительно содержащее блок контроля, выполненный с возможностью определения параметров перемещения фиксируемого объекта и/или событий, связанных с перемещением фиксируемого объекта, на основе двух или более изображений фиксируемого объекта, имеющих разное время фиксации, и определения, соответствуют ли параметры перемещения фиксируемого объекта и/или события, связанные с перемещением фиксируемого объекта, предварительно установленным требованиям.
25. Устройство по п. 1, дополнительно содержащее блок контроля, выполненный с возможностью определения параметров размещения или перемещения фиксируемого объекта и/или событий, связанных с размещением или перемещением фиксируемого объекта, на основе определения, что в разные моменты времени зафиксирован один и тот же фиксируемый объект, выполняемого на основе распознавания блоком распознавания по меньшей мере одного одинакового характерного признака фиксируемого объекта на разных зафиксированных изображениях.
26. Устройство по любому из пп. 23 и 25, в котором параметры размещения фиксируемого объекта содержат по меньшей мере одно из следующего: местоположение фиксируемого объекта, местоположение частей фиксируемого объекта.
27. Устройство по любому из пп. 23 и 25, в котором события, связанные с размещением фиксируемого объекта, содержат по меньшей мере одно из следующего: остановка, стоянка, препятствование проезду транспорта, проходу пешеходов.
28. Устройство по любому из пп. 24 и 25, в котором параметры перемещения фиксируемого объекта содержат по меньшей мере одно из следующего: направление перемещения фиксируемого объекта, траектория перемещения фиксируемого объекта, мгновенная скорость фиксируемого объекта, средняя скорость фиксируемого объекта, расстояние, пройденное за время между моментами фиксации, расстояние до соседних транспортных средств, пешеходов или объектов дорожной инфраструктуры.
29. Устройство по любому из пп. 24 и 25, в котором события, связанные с перемещением фиксируемого объекта, содержат по меньшей мере одно из следующего: остановка, проезд регулируемого перекрестка, проезд нерегулируемого перекрестка, пересечение пешеходного перехода, пересечение линии разметки, перестроение, обгон, перемещение по дороге или вне её.
30. Устройство по п. 1, дополнительно содержащее блок хранения данных, выполненный с возможностью хранения данных, полученных по меньшей мере от одного из блоков данного устройства.
31. Устройство по п. 11, дополнительно содержащее блок хранения карты, выполненный с возможностью хранения карты глубины и/или облака точек.
32. Устройство по п. 1, дополнительно содержащее блок хранения карты, выполненный с возможностью хранения карты с профилем местности, предварительно построенной с применением высокоточного измерения координат в движении с учетом поправок, получаемых от базовой станции.
33. Устройство по п. 32, в котором поправки, получаемые от базовой станции, реализованы согласно системе дифференциальной коррекции.
34. Устройство по п. 1, в котором определение географических координат объектов выполняется с использованием проекции географических координат, определенных блоком геопозиционирования фиксируемого объекта в момент фиксации изображения фиксируемого объекта, на профиле местности, сохраненном в блоке хранения карты.
35. Устройство по п. 34, в котором упомянутая проекция определяется по кратчайшему расстоянию между упомянутыми определенными географическими координатами и координатами профиля местности.
36. Устройство по п. 1, дополнительно содержащее блок формирования метаданных, выполненный с возможностью формирования метаданных по каждому зафиксированному объекту на основе данных, полученных по меньшей мере от одного из блоков данного устройства.
37. Устройство по п. 36, дополнительно содержащее передатчик, выполненный с возможностью передачи сформированных метаданных в центр обработки данных и/или на другое устройство для регистрации дорожной обстановки.
38. Устройство по п. 36, дополнительно содержащее приемник, выполненный с возможностью приема метаданных от центра обработки данных и/или от другого устройства для регистрации дорожной обстановки.
39. Устройство по п. 32, в котором карта дополнительно содержит данные о зонах, содержащих ограничения касательно размещения или перемещения на них транспортных средств,
причем устройство дополнительно содержит блок контроля, выполненный с возможностью определения, соответствует ли местоположение и/или направление фиксируемого объекта предварительно установленным требованиям,
причем блок контроля выполнен с возможностью выявления несоответствия на основе того, что параметры размещения или перемещения фиксируемого транспортного средства не соответствуют наложенным на него ограничениям в данной зоне карты.
40. Устройство по любому из пп. 22-25 и 39, в котором в разные моменты времени один и тот же фиксируемый объект зафиксирован разными устройствами для регистрации дорожной обстановки.
41. Устройство по любому из пп. 22-25 и 39, в котором в разные моменты времени один и тот же фиксируемый объект зафиксирован данным устройством.
42. Устройство по п. 1, дополнительно содержащее радар, выполненный с возможностью измерения скорости и направления фиксируемого объекта на основе эффекта Доплера.
43. Система для регистрации дорожной обстановки, содержащая:
- устройство для регистрации дорожной обстановки по п. 1, установленное на контролирующее транспортное средство, расположенное на автодороге или вблизи нее; и
- центр обработки данных, выполненный с возможностью приема, обработки, передачи и хранения данных и/или метаданных о фиксируемых объектах и на основе упомянутых метаданных определения, соответствует ли местоположение, направление, параметры размещения фиксируемого объекта и/или события, связанные с размещением фиксируемого объекта, предварительно установленным требованиям.
| НАВЕСНАЯ СТРЕЛА С ВАКУУМНЫМ ЗАХВАТОМ | 0 |
|
SU179452A1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СРЕДНЕЙ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606521C1 |
| 0 |
|
SU161004A1 |

