Область техники
Настоящие изобретения относятся к области видеонаблюдения и распознавания объектов и более точно касается системы и способа автоматизированного видеонаблюдения и распознавания объектов и ситуаций.
Уровень техники
Из уровня техники известны автоматизированные (аппаратно-программные) системы и способы видеонаблюдения, распознавания, идентификации и мониторинга объектов, предназначенные для использования в различных сферах. Наиболее часто такие системы используются для решения научно-исследовательских задач, в области технических систем безопасности, а также для мониторинга окружающей среды и контроля движения транспорта.
Известна система по патенту РФ 2137203, предназначенная для контроля потока автотранспортных средств, содержащая установленные в различных точках цифровые видеокамеры, компьютеры и/или серверы, связанные посредством локальной вычислительной сети. В памяти компьютеров имеются базы данных с возможностью их анализа и сопоставления с изображениями, получаемыми с видеокамер. Система позволяет с определенной погрешностью выявлять отдельные объекты поиска в контролируемых зонах и регистрировать их. Имеется интерфейс системы с оператором посредством монитора на контрольном посту. Ограничениями данной системы являются ограниченность контролируемых зон (камеры установлены неподвижно и имеют ограниченный угол обзора), статичность камер. Кроме того, данная система не предусматривает возможности распознавания ситуации в зоне контроля.
Известна система видеонаблюдения по патенту США 5982420, содержащая видеокамеры с поворотным устройством и изменяемым фокусным расстоянием (зуммер), соединенные с компьютером. Данная система предусматривает автоматическое наведение видеокамеры на объект, попадающий в контролируемую зону. Система регистрирует такой объект и осуществляет динамическое слежение за ним. Система не предусматривает возможности распознавания ситуации и соответствующего реагирования на ситуацию, а также не обеспечивает слежение за несколькими объектами.
Известна система наблюдения и прицеливания по опубликованной заявке на патент РФ №200128339, содержащая последовательно расположенные и оптически сопряженные сканирующее устройство, формирующее оптическое устройство, поворотное оптическое устройство и устройство визуального наблюдения (видеокамеру). Данная система позволяет осуществлять слежение за целью в автоматизированном режиме. Система не позволяет осуществлять анализ ситуации в зоне наблюдения в соответствии с заранее заданными тревожными ситуациями и реагировать соответствующим образом.
Сущность изобретения
В основу настоящего изобретения положена техническая задача создать систему и способ автоматизированного видеонаблюдения и распознавания ситуаций, которые помимо распознавания, слежения и регистрации объектов обеспечивали бы выполнение дополнительно следующих функций: распознавать и классифицировать объекты по определенным признакам в различных условиях освещенности, оперативный поиск объекта по задаваемым параметрам, распознавание ситуации по действиям объектов, с возможностью слежения за такими объектами, сохранения в памяти системы изображения, пригодного для последующего анализа и выдачи сигнала тревоги.
Указанная техническая задача решена за счет того, что предложена система (устройство) автоматизированного видеонаблюдения и распознавания объектов и ситуаций, содержащая, содержащая, по меньшей мере, одну видеокамеру и, по меньшей мере, одно вычислительное устройство с памятью, связанные посредством локальной вычислительной сети, которая согласно настоящему изобретению содержит, по меньшей мере, одно устройство распознавания цели, соединенное с видеокамерой, по меньшей мере, одну, реализованную на вычислительном устройстве с памятью, базу данных с заранее записанными в нее описаниями тревожных ситуаций, выполненную с возможностью доступа к ней с видеокамеры и с устройства распознавания целей и записи в нее новой информации, получаемой с видеокамеры, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения на цель в зависимости от получаемого от устройства распознавания цели управляющего сигнала, и, по меньшей мере, один терминал наблюдения, приспособленный для информирования оператора и получения от него управляющих команд, причем устройство распознавания цели приспособлено для анализа сигнала, поступающего от видеокамеры с возможностью распознавания тревожной ситуации и определения цели в соответствии с заданным алгоритмом с использованием описания тревожных ситуаций, хранящихся в базе данных и выдаче соответствующего управляющего сигнала на подвижную видеокамеру для наведения на цель и сигнала тревоги на терминал наблюдения, а подвижная видеокамера выполнена с возможностью получения изображения цели, пригодного для дальнейшего анализа, и его передачи для хранения в базу данных.
Предпочтительно в системе согласно настоящему изобретению устройство распознавания цели реализовано программно в вычислительном устройстве с памятью. Подвижная видеокамера выполнена с возможностью поворота в вертикальной и горизонтальной плоскости, и/или изменения фокусного расстояния, и/или изменения диафрагмы и/или настройки на фокус для обеспечения наведения на цель. Система согласно изобретению, преимущественно, дополнительно содержит датчик обнаружения цели, связанный с устройством распознавания целей, причем устройство распознавания цели приспособлено для анализа сигнала от датчика обнаружения цели. В качестве датчика обнаружения цели использовано устройство, выбранное из группы, включающей: инфракрасные камеры, термовизорные камеры, радиолокационные устройства, датчик перемещения.
Предпочтительно устройство распознавания цели выполнено с возможностью вычислять вектор скорости, текущую координату нахождения цели, формировать и передавать на подвижную видеокамеру соответствующий управляющий сигнал для обеспечения наведения подвижной видеокамеры на цель. Устройство распознавания цели выполнено с возможностью передачи управляющего сигнала на подвижную видеокамеру по последовательному каналу связи.
Преимущественно заданный алгоритм обеспечивает анализ сигнала от видеокамеры в соответствии с параметрами, выбранными из группы, включающей яркость, размер, длительность нахождения в контролируемой зоне, скорость и направление перемещения. В качестве вычислительного устройства с памятью использован персональный компьютер. Согласно изобретению, в памяти вычислительного устройства с помощью программных средств может быть сформирована карта-модель контролируемого системой пространства, выполненная с возможностью нанесения на нее модели цели, отражающей положение цели в контролируемом системой пространстве, в соответствии данными, полученными при обработке в устройстве распознавания цели сигнала, полученного от видеокамеры, причем данная карта-модель приспособлена для анализа оператором. Карта-модель может быть выполнена трехмерной.
Техническая задача решена также за счет того, что предложен способ видеонаблюдения, включающий этапы получения видеосигнала контролируемой зоны, по меньшей мере, одной видеокамерой, его передачи и его анализа, по меньшей мере, в одном вычислительном устройстве с памятью, в котором согласно изобретению полученный видеокамерой сигнал анализируют при помощи вычислительного устройства с использованием информации с описаниями тревожных ситуаций, заранее записанной в виде базы данных в памяти вычислительного устройства, по результатам анализа получают данные о цели, формируют управляющий сигнал, передают его на подвижную видеокамеру, приспособленную для наведения на цель в соответствии с управляющим сигналом, с помощью подвижной видеокамеры поучают изображение цели, пригодное для дальнейшего анализа, и передают его для хранения в базу данных.
Предпочтительно в способе согласно изобретению по результатам анализа дополнительно формируют сигнал тревоги и передают его оператору. Анализ осуществляют с возможностью вычислять вектор скорости, текущую координату нахождения цели, и дополнительно формируют и передают на подвижную видеокамеру соответствующий управляющий сигнал для обеспечения наведения подвижной видеокамеры на цель. Управляющий сигнал передают на подвижную видеокамеру по последовательному каналу связи. Анализ сигнала от видеокамеры осуществляю с учетом параметров цели, выбранных из группы, включающей яркость, размер, длительность нахождения в контролируемой зоне, скорость и направление перемещения. В качестве вычислительного устройства с памятью преимущественно используют персональный компьютер. Предпочтительно в памяти вычислительного устройства с помощью программных средств формируют карту-модель контролируемого системой пространства с возможностью нанесения на нее модели цели, отражающей положение цели в контролируемом системой пространстве, в соответствии данными, полученными при обработке в устройстве распознавания цели сигнала, полученного от видеокамеры, причем данную карту-модель приспосабливают для анализа оператором. Карту-модель могут формировать трехмерной.
Подробное описание изобретения
Настоящее изобретение будет понятно специалисту из приведенного ниже более подробного описания настоящего изобретения, а также конкретного неограничивающего примера его реализации со ссылками на чертежи, на которых:
- фиг.1 изображает общую функциональную схему системы видеонаблюдения и распознавания объектов и ситуаций согласно настоящему изобретению;
- фиг.2 - изображает схематически систему видеонаблюдения согласно конкретному неограничивающему примеру реализации настоящего изобретения.
Однотипные устройства обозначены на чертежах одинаковыми позициями.
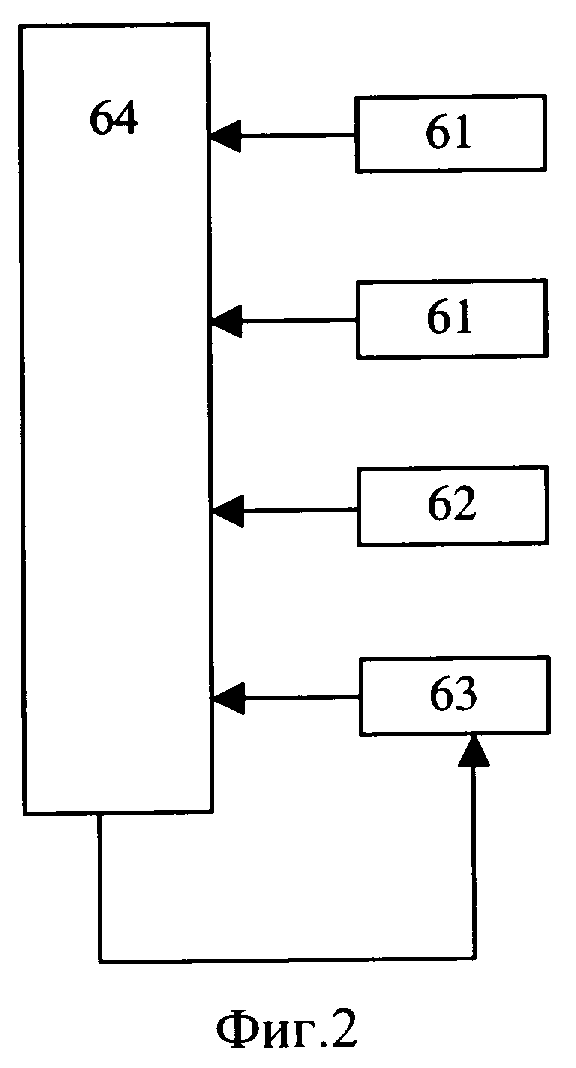
На фиг.1 представлена общая функциональная схема системы автоматизированного видеонаблюдения и распознавания объектов и ситуаций (далее система). Система состоит из взаимосвязанных устройств, соединенных электрически по правилам, известным в данной области техники. Отдельные устройства, выполняющие сходные функции в системе, для удобства анализа на схеме объединены в логические блоки. Данное разбиение на логические блоки является условным и сделано для удобства анализа системы и не ограничивает сущность изобретения.
Блок анализа фона и обнаружения целей обозначен на фиг.1 позицией 1. Блок 1 представляет собой набор устройств, предназначенных для обнаружения целей, использующих для этого различные физические принципы. В качестве таких устройств могут использоваться: цветные видеокамеры 11 (например, WAT-220, представлена на российском рынке фирмой Watec), черно-белые видеокамеры камеры 12 (например, WAT-902H, фирмы Watec), инфракрасные камеры 13 (например, TVC200ML, ф. ЦНИИ «Электрон»), термовизорные камеры 14 (например, ТВ-04 Кст, ф. НТПП "НИИЦТП"), радиолокационные устройства 15 (например, РЛС «ORWELL», ф. ГУП НПЦ «ЭЛВИС»), датчики 16 движения и определения координаты нахождения цели (например, 525D, представлена на российском рынке фирмой Paradox). Блок 1 может включать различное количество и комбинацию перечисленных выше устройств, в зависимости от конкретных потребностей пользователей системы, а также от условий эксплуатации. Устройства могут устанавливаться с обеспечением дублирования работы друг друга и взаимного перекрытия зон контроля для обеспечения повышенной надежности работы системы. Устройства Блока 1 электрически связаны через интерфейс (например, композитный видеосигнал или Ethernet) с блоком 2 распознавания целей, определения координат, параметров целей и анализа ситуаций. Устройства Блока 1 приспособлены передавать получаемые изображения зоны или другой сигнал распознавания цели на Блок 2. Блок 2 содержит устройство 21 распознавания цели, определения координат и параметров целей, анализа ситуаций, которое может быть реализовано в виде специализированного вычислительного устройства (например, промышленного компьютера на основе модулей стандарта PC-104 с использованием процессора «Мультикор») или на базе универсального персонального компьютера (например, с процессором «Интел Пентиум»), снабженного программным обеспечением, позволяющим получать и приводить в цифровую форму информацию от устройств анализа фона и обнаружения целей; запоминать и отслеживать состояние фона, в том числе его изменения (время суток, состояние атмосферы - ясно, облачно, осадки, время года и состояние покрова); вычислять вектор скорости, текущую координату нахождения цели; сохранять в запоминающем устройстве в базе данных распознанные параметры цели. Блок 2 распознавания целей, определения координат, параметров целей и анализа ситуаций соединен электрически через интерфейс (например, RS-485) с Блоком 3 подвижных управляемых видеокамер. Блок 2 приспособлен за счет использования программного обеспечения, например типового в данной области, для выдачи управляющих команд и передачи координаты и вектор скорости цели на Блок 3. Блок 2 также выполнен с возможностью управления подвижными видеокамерами 31 Блока 3 по последовательному каналу связи, за счет применения, например, типового программного обеспечения. Блок 2 также приспособлен для анализа сигналов, получаемых от устройств Блока 1 в соответствии с заданным алгоритмом с использованием информации, хранящейся в Базе данных Блока 4, с которым Блок 2 соединен. Блок 2 приспособлен для выдачи в зависимости от распознаваемой ситуации сигнала тревоги на терминалы 51 наблюдения анализа результатов и управления системой. Блок 2 выполнен с возможностью выдачи сигнала тревоги на терминалы 51 и сигнала управления видеокамерами 31. Блок 3 может содержать различное число подвижных управляемых видеокамер 31 различного типа (например, WV-CS854 ф. Panasonic), приспособленных для выполнения следующих функций в соответствии с полученной от Блока 2 управляющей командой: поворота в вертикальной и горизонтальной плоскости; изменение фокусного расстояния; настройка на фокус; изменение диафрагмы или скорости работы затвора. Подвижные видеокамеры Блока 3 предназначены для получения детального укрупненного изображения целей, используемого для дополнительного распознавания параметров цели или детального сопровождения цели по требованию оператора системы. Блок 3 связан с Блоком 4, представляющем собой вычислительную машину с запоминающим устройством (например, персональный компьютер). В данном запоминающем устройстве создана база данных с возможностью хранения видео архива. База данных Блока 4 выполнена с возможностью автоматического пополнения и хранения информации обо всех распознанных целях, распознанных ситуациях, параметрах цели, времени возникновения и пропадания целей, фотографии целей, фрагментов видео архива, отражающих все действия цели, при ее нахождении в зоне контроля видео системы. Укрупненные изображения, полученные подвижными видеокамерами Блока 3 в виде оцифрованных фотографий могут храниться в базе данных Блока 4. Данные фотографии могут быть использованы в дальнейшем для изучения ситуации специалистом и/или оператором. Блок 4 электрически связан с Блоком 2 распознавания целей, определения координат, параметров целей и анализа ситуаций. Блок 4 и Блок 2 связаны с обеспечением возможности передачи данных друг другу. Блок 4 также связан с Блоком 5 терминалов наблюдения, анализа результатов и управления системой. Терминалы 51 наблюдения, анализа результатов и управления системой представляют собой один или несколько персональных компьютеров, объединенных сетями связи. Терминалы 51 наблюдения, анализа результатов и управления системой выполнены с возможностью наблюдать за происходящим в зоне контроля системы (зона наблюдения устройств анализа фона и обнаружения целей). Это достигается за счет использования, например, типового монитора (цветного или черно-белого) и типового программного обеспечения. Терминалы 51 Блока 5 выполнены с возможностью наблюдения ситуации на экране и доступа оператора к управлению системой через клавиатуру или другой специализированный интерфейс типа человек-компьютер (например, джойстик).
В зависимости от стоящих перед системой по настоящему изобретению задач можно выбрать различную конкретную конфигурацию системы. В частности, логические блоки 2, 4 и 5 системы могут быть реализованы на различных аппаратных средствах. Блоки 2, 4 и 5 могут быть реализованы на одном специализированном вычислительном устройстве (например, промышленного компьютера на основе модулей стандарта PC-104 с использованием процессора «Мультикор») или на одном персональном компьютере (например, на базе процессора «Интел Пентиум») в виде специально запрограммированных областей памяти. Блоки 2, 4 и 5 могут быть выполнены также на базе распределенной сетевой системы, представляющей собой комбинацию специализированных вычислительных устройств и персональных компьютеров (с мониторами или без мониторов). В общем случае настоящее изобретение охватывает различные комбинации и варианты аппаратно-программной реализации устройств распознавания целей, определения координат и параметров целей, анализа ситуаций, базы данных и видеоархива, терминалов наблюдения, анализа результатов и управления системой. Конкретная аппаратно-программная реализация выбирается исходя их требований к системе в соответствии с правилами известными специалисту в данной области техники.
Система и способ автоматизированного видеонаблюдения и распознавания объектов и ситуаций согласно настоящему изобретению будут понятны специалисту в данной области из приведенного ниже описания работы конкретного неограничивающего примера реализации системы автоматизированного видеонаблюдения и распознавания объектов и ситуаций, которое ведется со ссылкой на фиг.2 чертежей. Данный пример системы согласно настоящему изобретению приведен для иллюстрации и не ограничивает совокупность существенных признаков настоящего изобретения.
Система по настоящему конкретному примеру реализации изобретения включает две стационарные видеокамеры 61 типа WAT-220 и одну инфракрасную (ИК) камеру 62 типа TVC200ML в качестве устройств анализа фона и обнаружения целей, универсальный персональный компьютер 64 с процессором «Интел Пентиум», оперативно-запоминающим устройством объемом 256 кБайт и твердым диском, объемом 20 МБайт, в качестве устройства распознавания цели, определения координат и параметров целей, анализа ситуаций. На данном персональном компьютере размещена база данных и терминала наблюдения анализа результатов и управления системой. В систему также входит подвижная управляемая видеокамера 63 типа WV-CS854.
Работа системы происходит следующим образом. Видеокамеры 61 и ИК-камера 62 формируют изображения двух частей общей видеосцены работы системы. При этом изображения частей видеосцены могут соприкасаться одной стороной (или быть независимы), образуя совокупную видеосцену, на которой функционирует система. ИК-камера 62 может образовывать отдельную видеосцену или формировать совокупное изображение вместе с видеокамерами 61. Такое использование видеокамер позволяет формировать изображение при дневном освещении по изображению видеокамер 61, а ночью по изображению камеры 62. Изображения через интерфейс транслируются в компьютер 64. Компьютер 64 в соответствии с программным обеспечением на базе оперативной системы «Windows» производит преобразование композитного аналогового видеосигнала, получаемого от камер, в цифровую форму и производит обработку изображения, а именно осуществляет следующие действия: производит анализ фона, обнаруживает цели, производит распознавание целей и ситуаций, определяет параметры целей, их координаты, запоминает траектории движения, передает результаты распознавания в базу данных, привязывая события ко времени, записывает видеосигнал в сжатом или необработанном виде в память компьютера в виде файлов, адрес которых располагается в базе данных, таким образом, видеосигнал связывается с событиями, информация о которых расположена в базе данных. Координаты целей передаются на подвижную видеокамеру 63 в виде совокупности целеуказаний с учетом прогнозирования нахождения целей в момент наведения камеры на цели. В компьютере 64 проводится также оцифровка видеоизображения подвижной видеокамеры 63, изображение может транслироваться на экран компьютера, один из кадров заносится в базу данных как детальная фотография цели. Изображение передается на обработку с целью распознавания цели и ее параметров по ее детальному изображению с помощью алгоритмов статического распознавания, известных специалисту в данной области.
Изображения видеокамер могут проецироваться на план или карту объекта, введенную и запомненную системой в виде областей карты, покрытых изображениями видеокамер. Распознанные объекты в виде мнемознаков, соответствующих конкретному типу цели, проецируются в реальном времени на карту или план объекта в соответствии с координатой их нахождения. Оператор при необходимости может замаскировать любую произвольную часть (или произвольное количество частей) изображения или части карты объекта, в то же время внутри маски могут быть сформированы освобожденные от маски области изображения. При этом события, происходящие в области маски, системой игнорируются. На изображении также могут быть сформированы одна или произвольное количество областей, подлежащих повышенной охране, т.н. области аларма. Эти области могут быть произвольной формы, возможно, имеющие внутри себя области произвольной формы, не являющейся зоной аларма. Каждой зоне аларма может быть присвоено название, время и дата работы, тип и параметра объекта или ситуации. При возникновении факта попадания объекта в зону аларма с заданными параметрами в заданное время или возникновение запрограммированной ситуации система выдаст на терминал оператора системы соответствующие сообщение. Оператор, активизировав аларм, автоматически получает на экран изображение события, вызвавшего аларм, независимо от того, происходит оно сейчас или произошло ранее за некоторое время. Возникновение аларма заносится как событие в базу данных. Оператор системы может, при необходимости, дать указание системе следить за выбранной им целью или несколькими целями, указанными произвольно, по изображению, или выбрав несколько объектов с определенными параметрами (например, имеющих самую большую скорость перемещения, или всех объектов одного типа, или цвета, или т.п.). При этом система автоматически поочередно будет выводить на экран изображения целей, передаваемые подвижной видеокамерой 63 в детальном виде.
Оператор может обучить систему распознаванию новых типов целей. Для этого он на изображении многократно указывает на изображение конкретной цели и вводит его название. При этом происходит обучение системы распознаванию конкретной новой цели.
Промышленная применимость
Система и способ согласно настоящему изобретению предназначены, главным образом, для использования в системах безопасности и мониторинга. Система может быть реализована как на базе специализированных устройств (видеокамер высокого разрешения, специализированных радиолокационных устройств, датчиков перемещения и вычислительных комплексов), так и на базе типовых телевизионных камер и компьютеров общего назначения. В зависимости от комплектации системы, а также от обеспечения дублирования работы отдельных устройств, можно добиваться требуемой надежности и уровня контроля за наблюдаемой территорией. Использование специализированного оборудования и обеспечение дублирования повышает качество и надежность работы и приводит к увеличению стоимости системы.
Система и способ автоматизированного видеонаблюдения и распознавания объектов и ситуаций согласно настоящему изобретению позволяют эффективно осуществлять автоматизированный контроль за охраняемой территорией при различных погодных условиях и времени суток, с высокой степенью надежности распознавать запрограммированные тревожные ситуации, выдавать сигналы тревоги и фиксировать тревожную ситуацию в виде видеозаписи, пригодной для дальнейшего анализа специалистом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ОБСТАНОВКИ В ЗРИТЕЛЬНЫХ ЗАЛАХ | 2005 |
|
RU2296434C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2626251C2 |
| СПОСОБ ВИДЕОНАБЛЮДЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА С КОНТРОЛЕМ ПОЖАРНОЙ ОПАСНОСТИ | 2013 |
|
RU2534827C2 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| ШАХТНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ | 2009 |
|
RU2401947C2 |
| Корпоративный телемедицинский комплекс для предупреждения эпидемических чрезвычайных ситуаций | 2020 |
|
RU2735400C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
Группа изобретений относится к области сигнализации. Система видеонаблюдения содержит видеокамеру, вычислительное устройство с памятью, устройство распознавания цели, подвижную видеокамеру, базу данных с заранее записанными в нее описаниями тревожных ситуаций, реализованную на вычислительном устройстве с памятью, и терминал наблюдения. Подвижная видеокамера выполнена с возможностью наведения на цель в зависимости от получаемого от устройства распознавания цели управляющего сигнала. База данных выполнена с возможностью доступа к ней с подвижной видеокамеры и с устройства распознавания цели и записи в нее новой информации, получаемой с подвижной видеокамеры. Терминал наблюдения приспособлен для информирования оператора и получения от него управляющих команд. Устройство распознавания цели приспособлено для анализа сигнала, поступающего от видеокамеры, с возможностью распознавания тревожной ситуации и определения цели в соответствии с заданным алгоритмом с использованием описания тревожных ситуаций, хранящихся в базе данных. Устройство распознавания цели выдает соответствующий управляющий сигнал на подвижную видеокамеру для наведения на цель и сигнал тревоги - на терминал наблюдения. Подвижная видеокамера выполнена с возможностью получения изображения цели, пригодного для дальнейшего анализа, и его передачи для хранения в базу данных. Способ видеонаблюдения включает этапы получения видеосигнала контролируемой видеокамерой зоны, его передачи и его анализа в вычислительном устройстве с памятью. Полученный видеокамерой сигнал анализируют при помощи вычислительного устройства с использованием информации с описаниями тревожных ситуаций, заранее записанных в виде базы данных в памяти вычислительного устройства. По результатам анализа получают данные о цели, формируют управляющий сигнал, передают его на подвижную видеокамеру, приспособленную для наведения на цель в соответствии с управляющим сигналом. С помощью подвижной видеокамеры получают изображение цели, пригодное для дальнейшего анализа, и передают его для хранения в базу данных. Группа изобретений характеризуется расширенными функциональными возможностями. 2 н. и 17 з.п. ф-лы, 2 ил.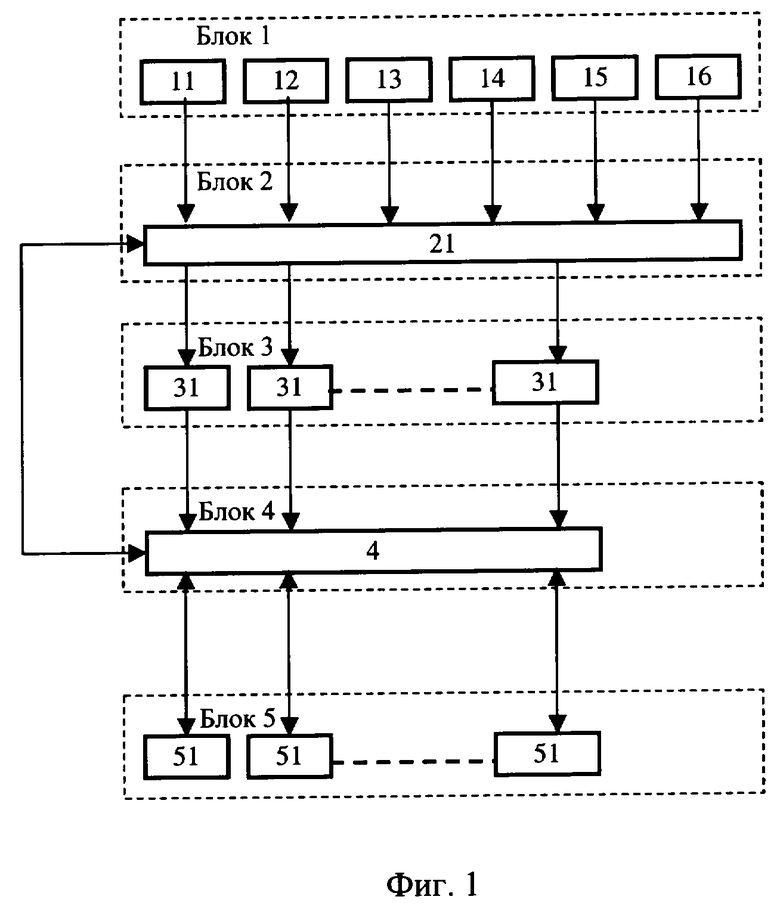
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| МНОГОЗОНОВАЯ СТАЦИОНАРНО-ПЕРЕДВИЖНАЯ СИСТЕМА КОНТРОЛЯ ЗА ДВИЖЕНИЕМ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2137203C1 |
| US 6504479 B1, 07.01.2003 | |||
| US 5022723 A, 11.06.1991. | |||

