Настоящее изобретение относится к системе силовой установки, содержащей винт, механическую систему передач, электродвигатель и электронное устройство управления двигателем. В частности, изобретение относится к средствам защиты гребного винта и механической системы передач от сильных механических сотрясений при внезапной остановке вращения винта, например, при его столкновении с подводным препятствием.
Старые типы ледокольных судов с механическим приводом (с турбиной или двигателем внутреннего сгорания) использовали систему передач, содержащую гребной винт на вале, приводимом непосредственно механической силовой установкой. В таких ледоколах целостность винта и системы передач может подвергаться риску, когда гребной винт ударяется о большую льдину, так как при этом может очень быстро возникнуть вынужденная остановка (скажем, в течение 0,5 секунды) против вращающего момента, передаваемого силовой установкой, что тем самым приводит к неприемлемо большой механической ударной нагрузке на гребной винт и систему передач.
Фиг.1 показывает, что для решения этой проблемы так называемого "ледового глушения" используется связь 10 по текучей среде, например турбосвязь по текучей среде Voith (RTM), между концами двух валов 12A, 12B системы передач для поглощения внезапного изменения скорости между механической установкой 14 и гребным винтом 16, тем самым избегая перенапряжения системы.
В других, более поздних типах ледокола, где электродвигатель непосредственно связан с гребным винтом через вал, не требуется вводить связи по текучей среде в систему передач, поскольку электродвигатель имеет способность очень быстро останавливать вращение, в отличие от турбины или дизельного двигателя. Тем не менее, вал винта все равно должен быть рассчитан с учетом сил, вызванных остановкой инерции вращения электродвигателя. На самом деле не имеет значения, установлены ли двигатель и система передач в корпусе судна или в отсеке для силовой установки снаружи основного корпуса.
Тем не менее, в последнее время было предложено использовать так называемые "корректирующие двигатели" для ледоколов, смотри Фиг.2. Как показано, в обычной конструкции корректирующего двигателя, высокоскоростной двигатель 20 приводит гребной винт 21 через три вала 22, 23, 24 и два комплекта зубчатых колес 25, 26. Двигатель 20 расположен внутри корпуса 27 судна, причем гребной винт 21 установлен на горизонтальной оси на нижнем конце вращающейся опоры 28, которая выступает вниз из корпуса. Опора соединена с корпусом в горизонтальной плоскости связи 29, что позволяет опоре вращаться вокруг вертикальной оси, центрированной по вертикальному валу 23, и, тем самым, изменять направление тяги гребного винта. Зубчатые колеса 25, 26, конечно, требуются для передачи движения от установленного в корпусе горизонтального вала 22 через вертикальный вал 23 на горизонтальный вал гребного винта 24 в основании опоры.
Желательно уменьшить размер двигателя, используя понижающую передачу, и тем самым допуская, чтобы двигатель работал с более высокими об/мин, чем гребной винт. К сожалению, это может подвергнуть гребной винт чрезмерной вращательно-ударной нагрузке под действием несоразмерного эффекта передачи, так как при передаче отдельного компонента инерции к гребному винту через понижающую передачу на скорости N, винту передается инерция, которая эффективно умножается на N2. Таким образом, система передач с ее сцеплением увеличивает инерцию вращения двигателя, как видно посредством винта, и увеличивает силы, воздействующие на вал и зубчатые колеса при соударении со льдом или при других неисправностях гребного винта. Чтобы избежать повреждения гребного винта и системы передач, может быть использована связь по текучей среде между электродвигателем и передачами.
К сожалению, такие связи по текучей среде подвергаются существенным потерям эффективности передачи энергии, что приводит к дополнительным затратам горючего и энергии.
Настоящее изобретение обеспечивает противоударное управление в корректирующих двигателях или других системах электродвигательных силовых установок, используемых на ледоколах и других плавающих судах так, чтобы они могли наилучшим образом противостоять остановкам системы передач при ударе, вызванным остановкой винта.
Согласно настоящему изобретению система силовой установки содержит гребной винт, механическую систему передач, электродвигатель, средство для управления выходным вращающим моментом двигателя к системе передач и средство аварийного управления вращающим моментом двигателя, причем средство аварийного управления вращающим моментом двигателя содержит:
средство для обнаружения чрезмерного замедления двигателя, и
средство для уменьшения или реверса вращающего момента, приложенного к механической системе передач двигателем при условии обнаружения чрезмерного замедления.
Таким образом, замедление двигателя производят вне системы передач, уменьшая тем самым сотрясение гребного винта и системы передач, если вращение гребного винта чрезмерно затруднено. Как будет оценено, что при соударении гребного винта о твердую подводную преграду, например большую льдину, изобретение обеспечивает целостность гребного винта и системы передач, уменьшая количество имеющейся энергии вращения, передаваемой на преграду.
Средство для управления выходным вращающим моментом двигателя предпочтительно содержит электронное векторное управляющее устройство и средство ввода эталонного сигнала вращающего момента в управляющее устройство, причем эталонный сигнал вращающего момента обеспечивает представление о желаемом вращающем моменте двигателя. Следовательно, средство для уменьшения или реверса вращающего момента, приложенного к механической системе передач двигателем, может для удобства содержать средство для изменения эталонного сигнала вращающего момента до низкой или отрицательной величины.
Средство для обнаружения чрезмерного замедления двигателя может содержать средство для определения замедления двигателя, средство для сравнения определенных значений замедления с пороговой величиной, представляющей чрезмерное замедление, и средство для выработки сигнала, указывающего чрезмерное замедление, если определенное замедление превышает пороговую величину.
Средство для изменения эталонного входного сигнала вращающего момента до низкой или отрицательной величины может включать в себя средство для изменения или замены эталонного входного сигнала вращающего момента при получении вышеупомянутого сигнала, указывающего чрезмерное замедление. В предпочтительном варианте осуществления средство для ввода эталонного сигнала вращающего момента в управляющее уствройство содержит (a) суммирующее сигналы средство для получения нормального эталонного сигнала вращающего момента и аварийного эталонного сигнала вращающего момента и для выдачи суммы сигналов на управляющее устройство, и (b) средства переключения для ввода аварийного эталонного сигнала вращающего момента в средство суммирования сигналов только тогда, когда средство переключения получает вышеупомянутый сигнал, указывающий чрезмерное замедление.
Изобретение также относится к способу аварийного управления силовой установкой, в которой электродвигатель приводит гребной винт через механическую систему передач; причем способ содержит этапы на которых:
определяют чрезмерное замедление двигателя, и
снижают или реверсируют вращающий момент, приложенный к механической системе передач двигателем, если обнаружено чрезмерное замедление.
Дополнительные аспекты изобретения будут очевидны из последующего описания и формулы изобретения.
Примеры вариантов осуществления изобретения теперь будут описаны здесь со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - схематический вид расположения системы передач гребного винта с использованием связи по текучей среде в предшествующем уровне техники;
Фиг.2 - схематический вид известной системы корректирующего двигателя, в котором электродвигатель управляет винтом через систему механической передачи; и
Фиг.3 - упрощенная блок-схема варианта осуществления изобретения, предназначенного для использования в сцеплении с корректирующим двигателем так, как показано на Фиг.2.
На Фиг.3 ссылочной позицией 30 обозначен бортовой электродвигатель со связанными с ним электрическими/электронными компонентами. Допускается, что последние включают в себя PWM преобразователь (преобразователь с модулированием ширины импульса) для преобразования электрического тока из генератора (не показан) в форму, пригодную для питания катушек статора электрического двигателя. Двигатель 30 приводит гребной винт 31 посредством системы 32 передач с зубчатыми колесами, как показано на Фиг.2, но изображенного здесь просто в виде участков вала гребного винта. В этом варианте осуществления изобретения выходной вращающий момент двигателя к системе передач управляется управляющим устройством 33 в соответствии с нормальным или желательным эталонным сигналом RN вращающего момента и аварийным эталонным сигналом RE вращающего момента. Когда измеренное замедление A двигателя превышает пороговую величину AT замедления, нормальный эталонный сигнал RN вращающего момента изменяется или заменяется аварийным эталонным сигналом RE вращающего момента, и управляющее устройство 33 подает сигнал двигателю 30 на снижение или реверсирование вращающего момента, приложенного к механической системе передач двигателем. Таким образом, может быть обеспечена целостность винта и системы передач, когда гребной винт ударяется о подводную преграду.
Вращающий момент, прилагаемый электрическим двигателем 30 к системе 32 передач при нормальной работе системы, устанавливается известным типом векторного управления посредством управляющего устройства 33. Система использует само по себе известное кодирующее устройство, определяющее положение вала, чтобы производить векторное управление двигателем. Информация о положении вала двигателя из кодирующего устройства E используется для обеспечения значительной ширины полосы частот пространственно ориентированного управления в векторном управляющем устройстве 33, которое, в свою очередь, регулирует вращающий момент, прилагаемый двигателем 30. Следовательно, сигнал S положения вала двигателя вырабатывается кодирующим устройством E положения вала (само по себе известным) и вводится в управляющее устройство 33 вместе с нормальным эталонным сигналом RN, который представляет желаемый вращающий момент, который должен вырабатывать двигатель. Эти входные сигналы обрабатываются управляющим устройством для выработки выходного сигнала V для запуска вышеупомянутого PWM преобразователя, посредством которого изменяется выходной вращающий момент двигателя.
В любое время при нормальной работе силовой установки, показатель изменения скорости двигателя управляется контролирующей подсистемой 34. В программном обеспечении или иным способом, сигнал положения вала S из кодирующего устройства E дважды дифференцируется (d/dt2). Первое дифференцирование производит сигнал R скорости вращения вала, который может быть затем использован, как описано ниже, а второе дифференцирование производит сигнал A ускорения/замедления вращения вала. Этот сигнал А подается в блок 35 сравнения, где он сравнивается с пороговым сигналом AT замедления. AT представляет чрезмерное замедление скорости двигателя, указывающее на внешнюю преграду или неисправность винта, как, например, при соударении винтом о большую льдину. Если блок 35 сравнения определяет, что порог замедления AT превышен, то он инициирует (например, посредством программного обеспечения или аппаратного ключа 36) ввод аварийного эталонного сигнала RE вращающего момента на суммирующее соединение 37. Суммированием сигнала RE с нормальным эталонным сигналом RN вращающего момента получают измененный эталонный сигнал RM вращающего момента.
Кроме того, аварийный эталонный сигнал RE вращающего момента может просто временно заменить нормальный эталонный сигнал RN, делая RM=RE.
Устанавливая аварийный эталонный RE вращающего момента на подходящую низкую или отрицательную величину, можно уменьшить передачу имеющейся энергии вращения на преграду. Например, если при обнаружении преграды аварийный эталонный RE вращающего момента (или RM, если происходит изменение посредством его суммирования с RN) установлен на максимальное замедление, энергия, переданная на преграду, будет минимизирована. Система эффективно достигает комплексного уменьшения инерции системы передач.
Когда вал останавливается, или удаляется ледяная нагрузка, то быстрое падение скорости прекращается, и может продолжаться нормальная работа.
Следует учесть, что AT и, конечно, RE не должны быть фиксированными величинами. Например, RE может быть временной характеристикой вращения, и оба или каждое значение могут быть программируемыми для того, чтобы изменяться как функции одной или более характеристик передачи, как, например, скорость вращения вала сразу перед началом замедления. Этим можно достичь такого эффекта, что чем больше скорость двигателя до события, тем больший обратный вращающий момент приложен двигателем, и, следовательно, большее замедление приложено к смежному с двигателем концу системы передач винта, чтобы противодействовать ударному замедлению при неисправности винта.
В вышеописанной системе управление вращающим моментом двигателя может быть либо непрерывным, либо циклическим.
При моделировании было обнаружено, что при способе управления согласно изобретению механические уровни напряжения на вале винта уменьшаются в два раза. Одно из преимуществ изобретения состоит в том, что оно допускает использование более скоростных двигателей без опасности повреждения системы передач. Следует отметить, что высокоскоростные двигатели являются более дешевыми, чем низкоскоростные двигатели. Можно также использовать менее дорогие зубчатые колеса и валы.
Способ также допускает использование более высокого вращающего момента при низких скоростях для медленно прилагаемых нагрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ И СИЛОВАЯ УСТАНОВКА | 2017 |
|
RU2748924C1 |
| Силовая установка | 1979 |
|
SU802573A1 |
| СИЛОВАЯ УСТАНОВКА | 1999 |
|
RU2198818C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 1998 |
|
RU2132784C1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2008 |
|
RU2484574C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ СИЛОВОЙ УСТАНОВКИ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2000 |
|
RU2267020C2 |
| Многофункциональная энергетическая установка | 2022 |
|
RU2792208C1 |
| ПРОПУЛЬСИВНЫЙ АГРЕГАТ, ОСНАЩЕННЫЙ РУЛЕВЫМ УСТРОЙСТВОМ | 2016 |
|
RU2704695C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2544029C2 |
Изобретение относится к судостроению и касается создания силовой установки с ее аварийным управлением. Силовая установка содержит гребной винт (31), механическую систему (32) передач, электродвигатель (30) и устройство (33) для управления выходным вращающим моментом двигателя к системе передач. Силовая установка содержит средство (34) аварийного управления вращающим моментом двигателя, которое включает в себя средство (35) для обнаружения чрезмерного замедления и средство (36, 37) для уменьшения или реверса вращающего момента, приложенного к системе (32) передач двигателем при условии обнаружения чрезмерного замедления. Выходной вращающий момент двигателя к системе передач управляется устройством (33) по отношению к нормальному эталонному сигналу (RN) вращающего момента и аварийному эталонному сигналу (RE) вращающего момента. Когда измеренное замедление (А) двигателя превышает пороговую величину (AT) замедления, нормальный эталонный сигнал (RN) вращающего момента изменяется или заменяется аварийным эталонным сигналом (Re) вращающего момента, и управляющее устройство (33) посылает сигналы двигателю (30) на уменьшение или реверсирование вращающего момента, приложенного к механической системе передач двигателем. Изобретение позволяет обеспечить целостность винта и системы передач при ударе гребного винта о подводную преграду. 2 н. и 10 з.п. ф-лы, 3 ил.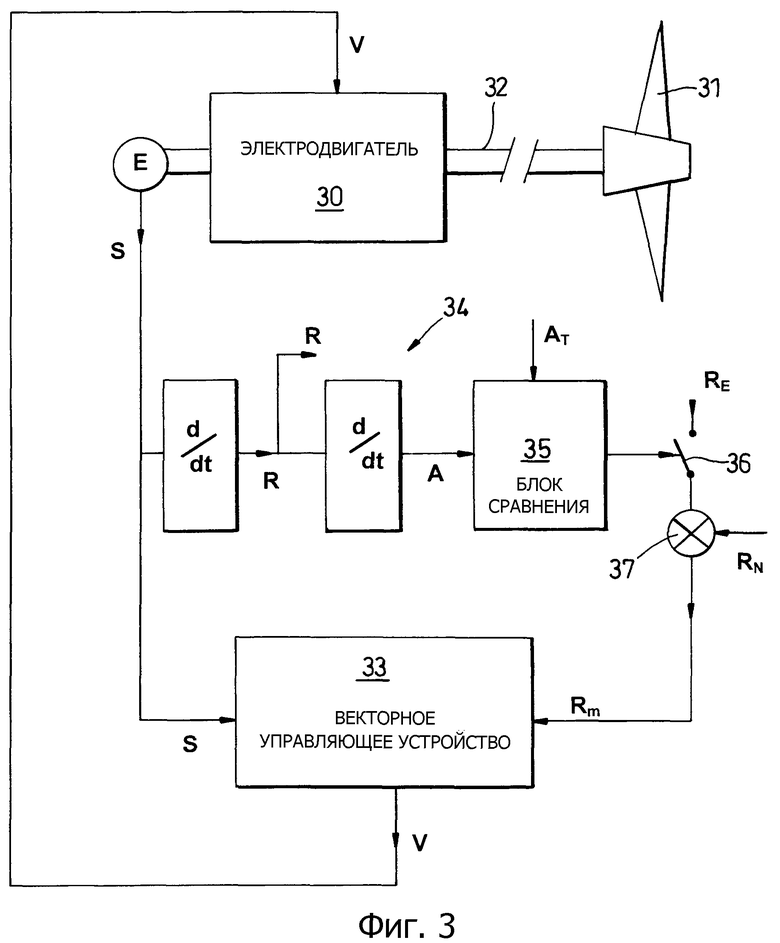
1. Система силовой установки, содержащая гребной винт (31), механическую систему (32) передач, электродвигатель (30) и средство (33) для управления выходным вращающим моментом двигателя к системе передач, отличающаяся тем, что содержит средство (34) аварийного управления вращающим моментом двигателя, включающее в себя:
средство (35) для обнаружения чрезмерного замедления двигателя, и
средство (36, 37) для уменьшения или реверса вращающего момента, приложенного к механической системе передач двигателем при условии обнаружения чрезмерного замедления.
2. Система по п.1, отличающаяся тем, что средство для управления выходным вращающим моментом двигателя содержит электронное векторное управляющее устройство и средство ввода эталонного сигнала вращающего момента в управляющее устройство.
3. Система по п.2, отличающаяся тем, что средство для уменьшения или реверса вращающего момента, приложенного к механической системе передач двигателем, содержит средство для изменения эталонного сигнала вращающего момента до низкой или отрицательной величины.
4. Система по любому из предыдущих пунктов, отличающаяся тем, что средство обнаружения чрезмерного замедления двигателя содержит средство для определения замедления двигателя, средство для сравнения определенных значений замедления с пороговой величиной, представляющей чрезмерное замедление, и средство для выработки сигнала, указывающего чрезмерное замедление, если определенное замедление превышает пороговую величину.
5. Система по п.4, отличающаяся тем, что средство для изменения эталонного входного сигнала вращающего момента до низкой или отрицательной величины содержит средство для изменения или замены эталонного входного сигнала вращающего момента при получении сигнала, указывающего чрезмерное замедление.
6. Система по п.5, отличающаяся тем, что средство для ввода эталонного сигнала вращающего момента в управляющее устройство содержит:
(a) суммирующее сигналы средство для получения нормального эталонного сигнала вращающего момента и аварийного эталонного сигнала вращающего момента для выдачи суммы сигналов на управляющее устройство, и
(b) средства переключения для ввода аварийного эталонного сигнала вращающего момента в средство суммирования сигналов только тогда, когда средство переключения получает сигнал, указывающий чрезмерное замедление.
7. Способ аварийного управления силовой установкой, в которой электрический двигатель (30) приводит гребной винт (31) через механическую систему (32) передач, отличающийся тем, что содержит этапы, на которых:
определяют чрезмерное замедление двигателя, и
снижают или реверсируют вращающий момент, приложенный к механической системе передач двигателем, если обнаружено чрезмерное замедление.
8. Способ по п.7, отличающийся тем, что выходной вращающий момент двигателя управляется электронным векторным управляющим устройством в соответствии с эталонным сигналом вращающего момента, поступающим в управляющее устройство.
9. Способ по п.8, отличающийся тем, что вращающий момент, приложенный к механической системе передач двигателем, уменьшается или реверсируется изменением эталонного сигнала вращающего момента до низкой или отрицательной величины.
10. Способ по любому из пп.7-9, отличающийся тем, что чрезмерное замедление двигателя обнаруживают с помощью определения замедления двигателя сравнением определенных величин замедления с пороговой величиной, представляющей собой чрезмерное замедление, и выработкой сигнала, указывающего чрезмерное замедление, если считанное замедление превышает пороговую величину.
11. Способ по п.10, отличающийся тем, что эталонный входной сигнал вращающего момента изменяется до низкой или отрицательной величины изменением или заменой эталонного входного сигнала вращающего момента при получении сигнала, указывающего чрезмерное замедление.
12. Способ по п.11, отличающийся тем, что эталонный сигнал вращающего момента получают суммированием нормального эталонного сигнала вращающего момента и аварийного эталонного сигнала вращающего момента только тогда, когда обнаружено чрезмерное замедление.
| Система дистанционного автоматизированного управления судовыми двигателями | 1974 |
|
SU495234A1 |
| Способ приготовления катализатора для синтеза пиридиновых оснований | 1989 |
|
SU1685511A1 |
| JP 10218094 A, 18.08.1998. | |||

