1
Изобретение относится к судостроению.
Известны системы дистанционного автоматизированного управления судовым двигателем (ДАУ), содержаш.ие датчик плавной регулировки оборотов, последовательно соединенные датчик фиксированных команд, сумматор, усилитель, переключающее устройство, исполнительный механизм и регулятор скорости, выход которого подключен ко входу двигателя, датчик перегрузки, входы которого соответственно через датчик скорости и датчик положения топливорегулирующего органа подключены к выходам двигателя, программное устройство, входы которого соединены с выходами соответственно датчика скорости и датчика фиксированных команд, а вы.ходы - с входами переключающего устройства и устройства пуск-реверса, выход которого соединен с другим входом двигателя, выход исполнительного механизма соединен с входом сумматора;
Известные системы ДАУ имеют не менее двух программ управления, которые определяют различные условия пуска. Как пуск, так и пуск с реверсом осуществляется по двум уровням: нормальному или повышенному. На нормальном и повышенном уровнях различными являются число оборотов начала реверсирования, число оборотов конца пуска и величина пусковой подачи топлива (а для двигателей с раздельным пуском - величина послепусковой подачи топлива).
На первой (основной) программе управления в известных системах пуск осуществляется следующим образом: первая попытка пуска проходит на нормальном уровне, а последующие (если первая попытка была неудачной) - на повышенном.
На второй (экстренной) программе управления все понытки пуска, в том числе и первая, проходят на повышенном уровне.
При реверсировании с хода, т. е. при наличии инерции судна и вращении винта в «турбинном режиме первая попытка пуска реверса срывается, так как состояние судна и двигателя требует для уверенного пуска параметров повышенного уровня. Пуск двигателя осуществляется только с второй попытки, когда установлены повыщенные параметры пуска, что приводит к лишнему переохлаждению стенок камеры сгорания пусковым воздухом, увеличивая температурные напряжения втулок, поршней и крышек цилиндров, а также расход пускового воздуха.
Для запуска двигателя с первой попытки при реверсировании и инерции судна необходимо вручную включить вторую (экстренную) программу управления, при которой все попытки пуска осуществляются на повышенных параметрах.
Однако управление только на экстренной программе-приводит к пуску на повышенных параметрах при всех условиях, в том числе и тогда, когда судно не имеет инерции, а следовательно, делает пуск, более «жестким без необходимости.
В известных системах ДАУ главными двигателями введенная поправка при изменении основной команды не снимается, что может привести к аварийной ситуации. Например, нри введенной поправке на уменьшение команды и подаче фиксированной команды «Самый малый ход суммарный сигнал команды может оказаться меньше команды, обеспечивающей минимально-устойчивые обороты, и двигатель остановится. При введенной поправке на увеличение и подаче фиксированной команды «Стоп суммарный сигнал команды может быть неравным нулю, и двигатель не остановится.
В известных системах ДАУ блок зашиты от перегрузок состоит из усилителя и исполнительного механизма, ограничивающего величину подачи топлива нри наличии перегрузки. Величина подачи топлива, таким образом, изменяется всережимным регулятором скорости в зависимости от заданного режима и исполнительным механизмом блока защиты от перегрузки.
Таким образом, в известных системах ДАУ необходимо менять вручную программу управления главным двигателем на маневрах при наличии или отсутствии инерции, либо заведомо ориентироваться на повторные попытки пуска, что вредно сказывается на долговечности деталей двигателя, отсутствует сброс ранее введенной поправки при изменении основных команд, кроме того, имеется отдельный исполнительный механизм в блоке зашиты двигателя от перегрузок.
С целью повыщения надежности работы системы она содержит устройство сброса поправки, включенное между датчиком плавной регулировки оборотов и сумматором, и дополнительное переключающее устройство, входы которого соединены с выходами соответственно датчика скорости и датчика фиксированных команд, а выход - с другим входом устройства пуска-реверса, выход датчика перегрузки подключен к программному устройству.
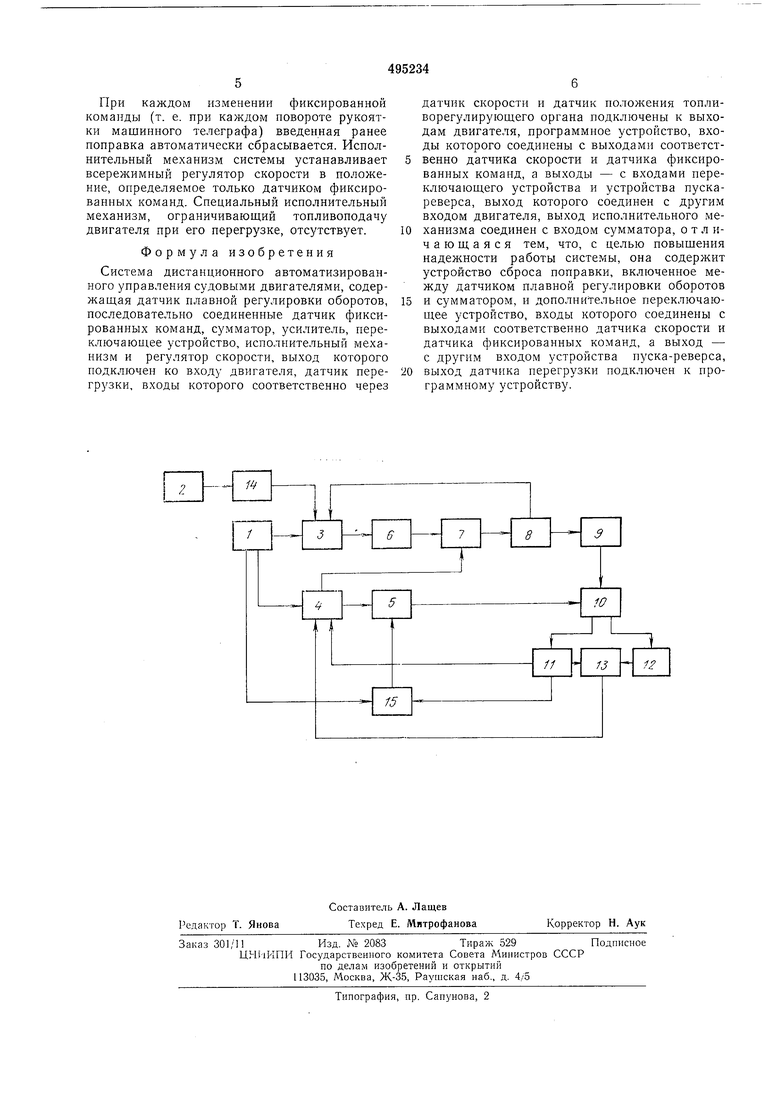
На чертеже дана блок-схема предлагаемой системы ДАУ.
Предлагаемая система содержит датчик 1 фиксированных команд, механически связанный с рукояткой машинного телеграфа в рулевой рубке, датчик 2 плавной регулировки с отдельной рукояткой, сумматор 3, программное устройство 4, устройство 5 пуска-реверса, усилитель 6, переключающее устройство 7, определяющее два режима работы исполнительного механизма 8 (в режиме управления скоростью вращения и в режиме пуска и реверса), регулятор 9 скорости главного двигателя 10, датчик 11 скорости вращения, датчик
12 положения топливорегулирующего органа, датчик 13 перегрузки двигателя, устройство 14 сброса поправки и переключающее устройство 15.
Система ДАУ работает следующим образом.
Сигнал датчика 1 фиксированных команд поступает через сумматор 3, усилитель, переключающее устройство 7 и механизм 8 на регулятор 9 скорости и на программное устройство 4. В зависимости от состояния двигателя судна (скорости и направления врашения, положения распределительных органов двигателя, наличия или отсутствия инерции судна)
и заданной команды с программного устройства 4 поступает сигнал на устройство 5 пуска-реверса, в результате автоматически осуществляется пуск или реверс двигателя на нормальном или повышенном уровне. По
окончании пуска сигнал, поступающий с программного устройства 4 на переключающее устройство 7, выводит двигатель 10 на заданный датчиком 1 режим работы. Сигнал датчика 2 плавной регулировки поступает на суммирующее устройство 3 через устройство 14 сброса поправки и является дополнительным сигналом к сигналу датчика 1 фиксированных команд. При изменении основной команды датчик 2 плановой регулировки автоматически
устанавливается в положение пулевого сигнала, т. е. сигнал поправки снимается.
На датчик 13 перегрузки двигателя поступает сигнал с датчика 11 скорости вращения и сигнал с датчика 12 положения топливорегулирующего органа. Если суммарный сигнал превышает ограничительную характеристику двигателя, то на программное устройство 4 с датчика 13 поступает сигнал о наличии перегрузки. В свою очередь, программное устройство 4 через переключающее устройство 7 и исполнительный механизм 8 изменяет уставку регулятора 9 скорости, который снижает обороты главного двигателя 10 до тех пор, пока исчезнет сигнал перегрузки,
В такой системе пуск на повышенном уровне производится при одновременном наличии как команды «Средний ход или «Полный ход, так и инерции судна, т. е. врашения
винта в «турбинном режиме. При этом изменение инерции, т. е. скорости врашения гребного винта, производится либо после выполнения операций по реверсированию распределительных органов двигателя, либо через определенную выдержку времени.
Если к моменту измерения скорость вращения гребного винта не упадет ниже заданной величины, то судно имеет мнерцию. В этом случае сигнал о наличии инерции вводится в
переключаюшее устройств. 15, изменяющее параметры пуска-реверса на повышенные.
Таким образом, параметры пуска-реверса автоматически меняются в зависимости от условий работы (от состояния двигателя и судна и от заданной команды).
При каждом изменении фиксированной команды (т. е. при каждом новороте рукоятки машинного телеграфа) введенная ранее поправка автоматически сбрасывается. Исполнительный механизм системы устанавливает всережимный регулятор скорости в положение, определяемое только датчиком фиксированных команд. Специальный исполнительный механизм, ограничивающий топливоподачу двигателя при его перегрузке, отсутствует.
Формула изобретения
Система дистанционного автоматизированного управления судовыми двигателями, содержащая датчик плавной регулировки оборотов, последовательно соединенные датчик фиксированных команд, сумматор, усилитель, переключающее устройство, исполнительный механизм и регулятор скорости, выход которого подключен ко входу двигателя, датчик перегрузки, входы которого соответственно через
датчик скорости и датчик положения топливорегулирующего органа подключены к выходам двигателя, программное устройство, входы которого соединены с выходами соответственно датчика скорости и датчика фиксированных команд, а выходы - с входами переключающего устройства и устройства пускареверса, выход которого соединен с другим входом двигателя, выход исполнительного механизма соединен с входом сумматора, от л ичающаяся тем, что, с целью повышения надежности работы системы, она содержит устройство сброса поправки, включенное между датчиком плавной регулировки оборотов
и сумматором, и дополнительное переключающее устройство, входы которого соединены с выходами соответственно датчика скорости и датчика фиксированных команд, а выход - с другим входом устройства пуска-реверса,
выход датчика перегрузки подключен к программному устройству.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| Система дистанционного автоматизированного управления судовым двигателем | 1977 |
|
SU624822A1 |
| Устройство для запуска главного судового двигателя | 1980 |
|
SU953254A2 |
| Устройство автоматического управления судовым дизелем | 1990 |
|
SU1743997A1 |
| Устройство управления многодвигательной энергетической установкой с газотурбинными двигателями | 1972 |
|
SU472063A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Устройство для запуска главного судового двигателя | 1981 |
|
SU1002653A2 |
| Система управления главной судовой дизельной установкой при реверсировании | 1989 |
|
SU1676926A1 |
| Устройство для регистрации маневров главного судового двигателя | 1982 |
|
SU1115964A2 |
