Текст описания приведен в факсимильном виде.




| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОДНОЙ РУКОЙ БЕЗ ИСПОЛЬЗОВАНИЯ ПОДСТАВКИ КАРМАННЫМ КОМПЬЮТЕРОМ И ПРИСПОСОБЛЕНИЕ ДЛЯ УДЕРЖАНИЯ ЭЛЕКТРОННОГО УСТРОЙСТВА В РУКЕ | 2007 |
|
RU2355019C2 |
| РУКОЯТЬ ПАЛКИ, ИСПОЛЬЗУЕМОЙ ПРИ КАТАНИИ НА ЛЫЖАХ, ХОДЬБЕ ИЛИ КАТАНИИ НА КОНЬКАХ, С ПРИКРЕПЛЕННЫМ К НЕЙ РЕМНЕМ | 2002 |
|
RU2277004C2 |
| Средство для защиты руки | 1990 |
|
SU1711799A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УДЕРЖАНИЯ ЭЛЕКТРОННОГО УСТРОЙСТВА В РУКЕ | 2009 |
|
RU2401028C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Устройство для удержания металлического предмета или предмета с магнитом | 2024 |
|
RU2837792C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2012 |
|
RU2493580C1 |
| КЛАВИАТУРА | 2005 |
|
RU2321050C2 |
| Устройство для реабилитации пальцев кисти | 2018 |
|
RU2694174C1 |
Изобретение относится к управлению карманным устройством, обладающим сенсорным экраном, миниатюрной клавиатурой или набором мелких управляющих кнопок, при помощи управляющих устройств стилусообразного типа, а также к конструкциям перчаток и напальчников. Для управления одной рукой без использования подставки карманным компьютером, область расположения органов управления которого включает в себя сенсорный экран и управляющие кнопки, на ладонь руки надевают первое приспособление, содержащее рабочую деталь с узким концом из твердого материала и средства фиксации указанной рабочей детали. На ладонь руки надевают также второе приспособление, обеспечивающее фиксацию указанного карманного компьютера не менее чем на двух пальцах ладони руки, кроме большого и указательного пальцев. Фиксируют карманный компьютер на указанных не менее чем двух пальцах ладони руки с помощью устройства в указанном положении относительно пальцев руки. Управляют карманным компьютером путем нажатия на соответствующие места сенсорного экрана и управляющих кнопок карманного компьютера рабочей деталью с узким концом из твердого материала. Предложено три варианта регуляторов длины выступания рабочей детали. Изобретение обеспечивает управление компьютером одной рукой без использования подставки. 5 н. и 19 з.п. ф-лы, 14 ил.
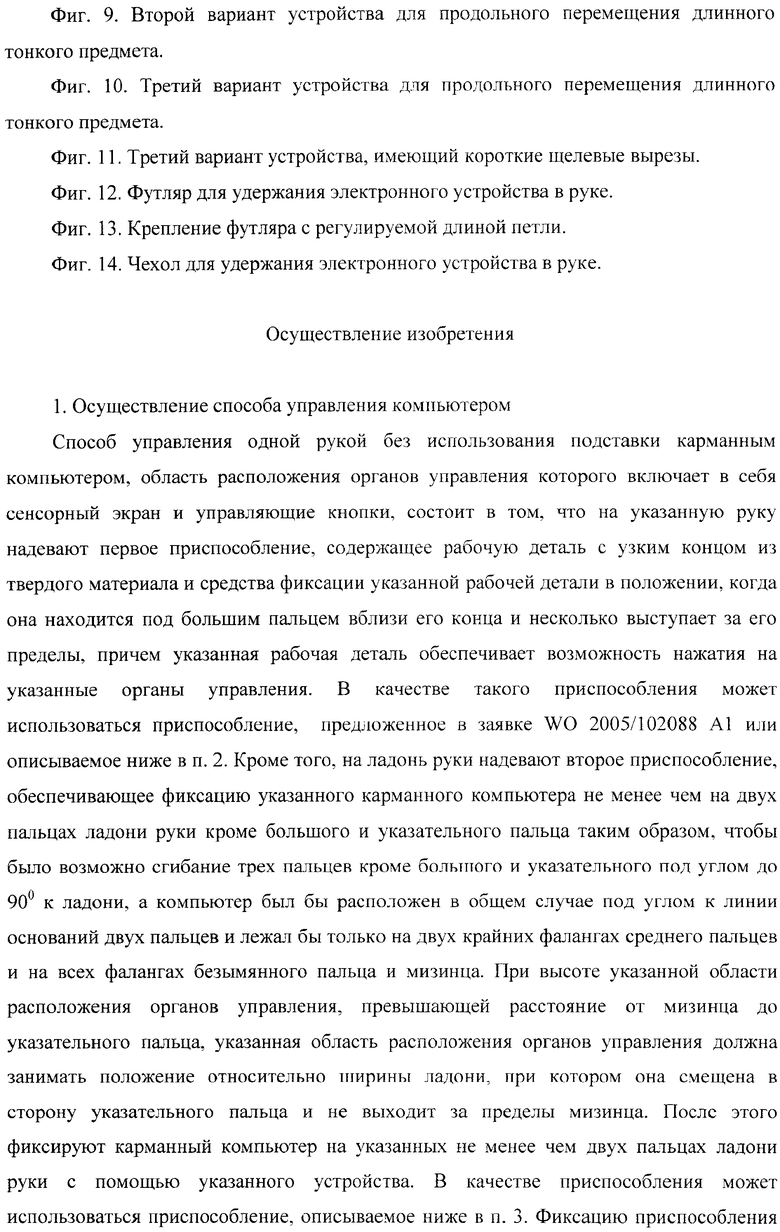
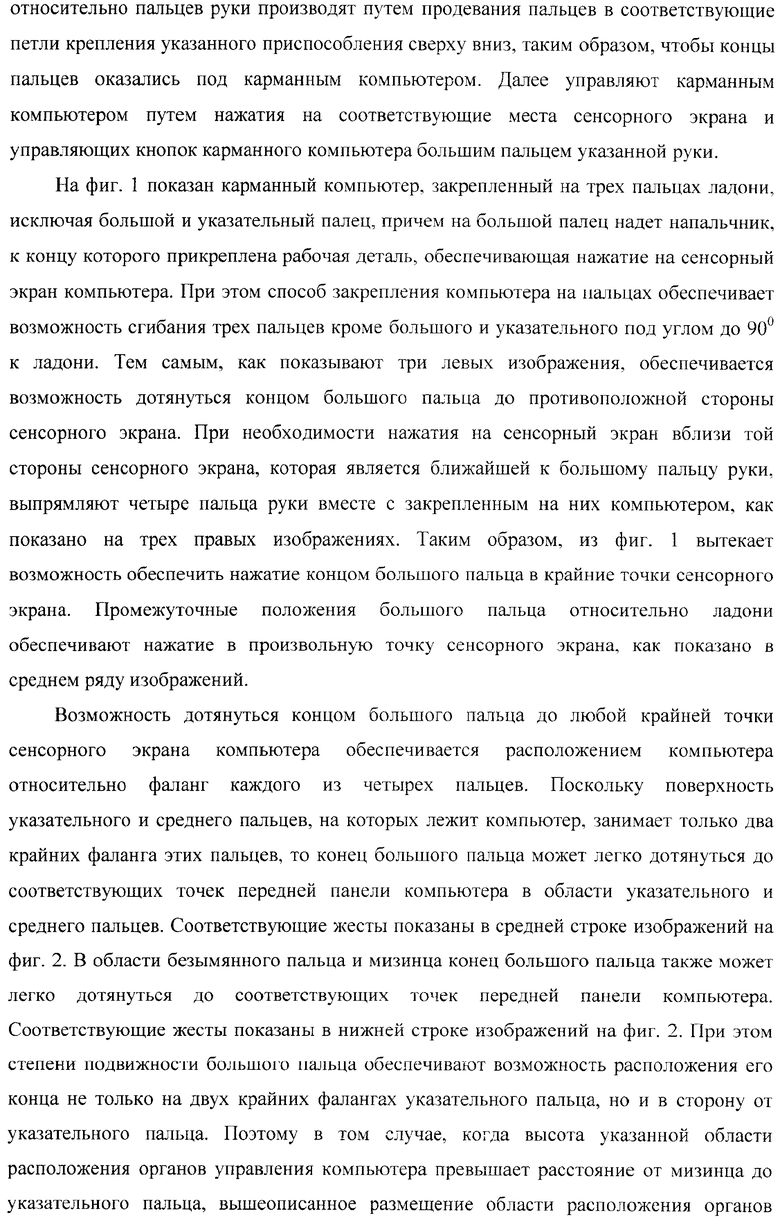
1. Способ управления одной рукой без использования подставки карманным компьютером, у которого область расположения органов управления содержит сенсорный экран и управляющие кнопки, при котором:
на указанную руку надевают первое приспособление, содержащее рабочую деталь с узким концом из твердого материала и средства фиксации указанной рабочей детали в положении, когда она находится под большим пальцем вблизи его конца и несколько выступает за его пределы, причем указанная рабочая деталь обеспечивает возможность нажатия на указанные органы управления;
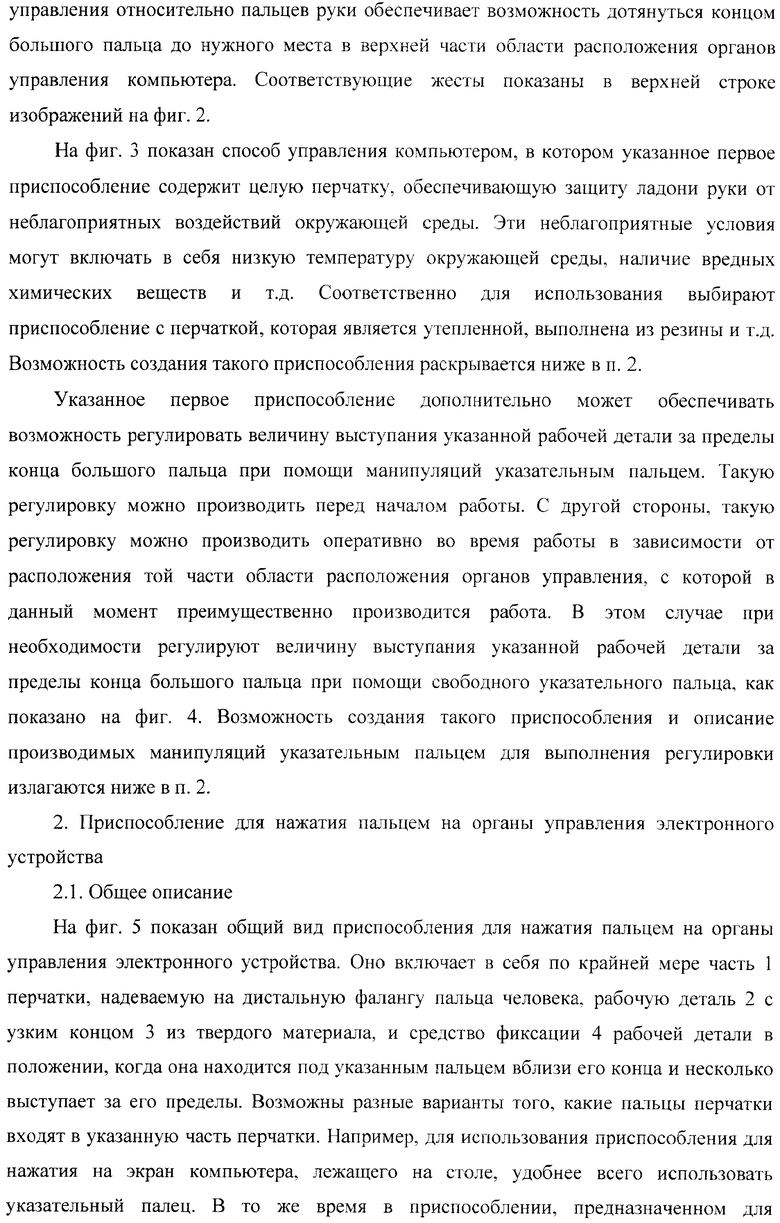
на ладонь указанной руки надевают второе приспособление, обеспечивающее фиксацию указанного карманного компьютера не менее чем на двух пальцах ладони руки кроме большого и указательного пальцев таким образом, чтобы было возможно сгибание трех пальцев кроме большого и указательного под углом до 90° к ладони, а компьютер был бы расположен в общем случае под углом к линии оснований указанных двух пальцев и лежал бы только на двух крайних фалангах среднего пальца и, возможно, на всех фалангах безымянного пальца и мизинца, таким образом, чтобы при высоте указанной области расположения органов управления, превышающей расстояние от мизинца до среднего пальца, указанная область расположения органов управления занимала бы положение относительно ширины ладони, при котором она смещена в сторону указательного пальца и не выходит за пределы мизинца, причем указанное приспособление не закрывало бы передней панели карманного компьютера, закрывало бы только незначительную его часть, оставляя незакрытой органы управления карманного компьютера, или его часть, закрывающая органы управления указанного карманного компьютера, была бы прозрачна и обеспечивала бы передачу нажатий на указанные органы управления;
фиксируют карманный компьютер на указанных не менее чем двух пальцах ладони руки с помощью указанного приспособления в указанном положении относительно пальцев руки;
управляют карманным компьютером путем нажатия на соответствующие места сенсорного экрана и управляющих кнопок карманного компьютера концом большого пальца указанной руки через указанное первое приспособление.
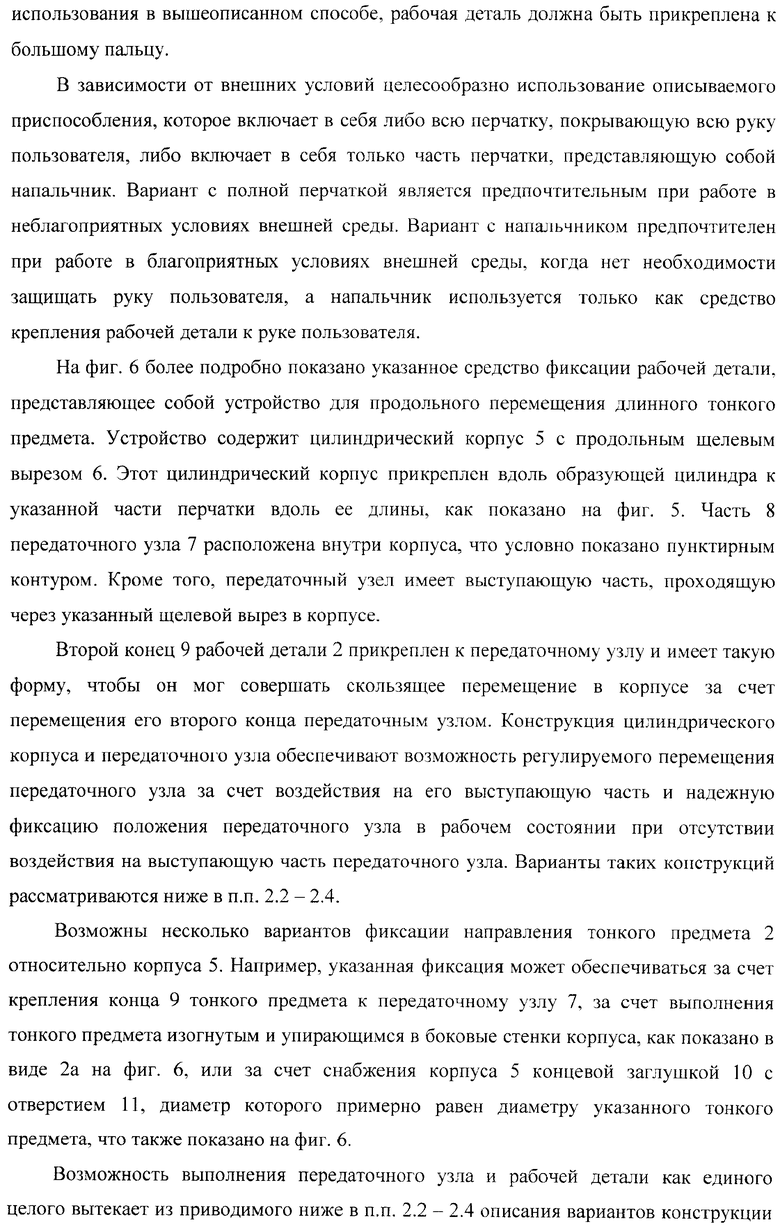
2. Способ управления по п.1, отличающийся тем, что указанное первое приспособление содержит целую перчатку, обеспечивающую защиту ладони руки от неблагоприятных воздействий окружающей среды.
3. Способ управления по п.1, отличающийся тем, что указанное первое приспособление обеспечивает возможность регулировать величину выступания указанной рабочей детали за пределы конца большого пальца при помощи манипуляций указательным пальцем.
4. Способ управления по п.3, отличающийся тем, что указанную величину выступания регулируют перед началом работы в зависимости от длины большого пальца.
5. Способ управления по п.3, отличающийся тем, что указанную величину выступания регулируют в зависимости от положения той части области расположения органов управления, в которой в данный момент производится работа.
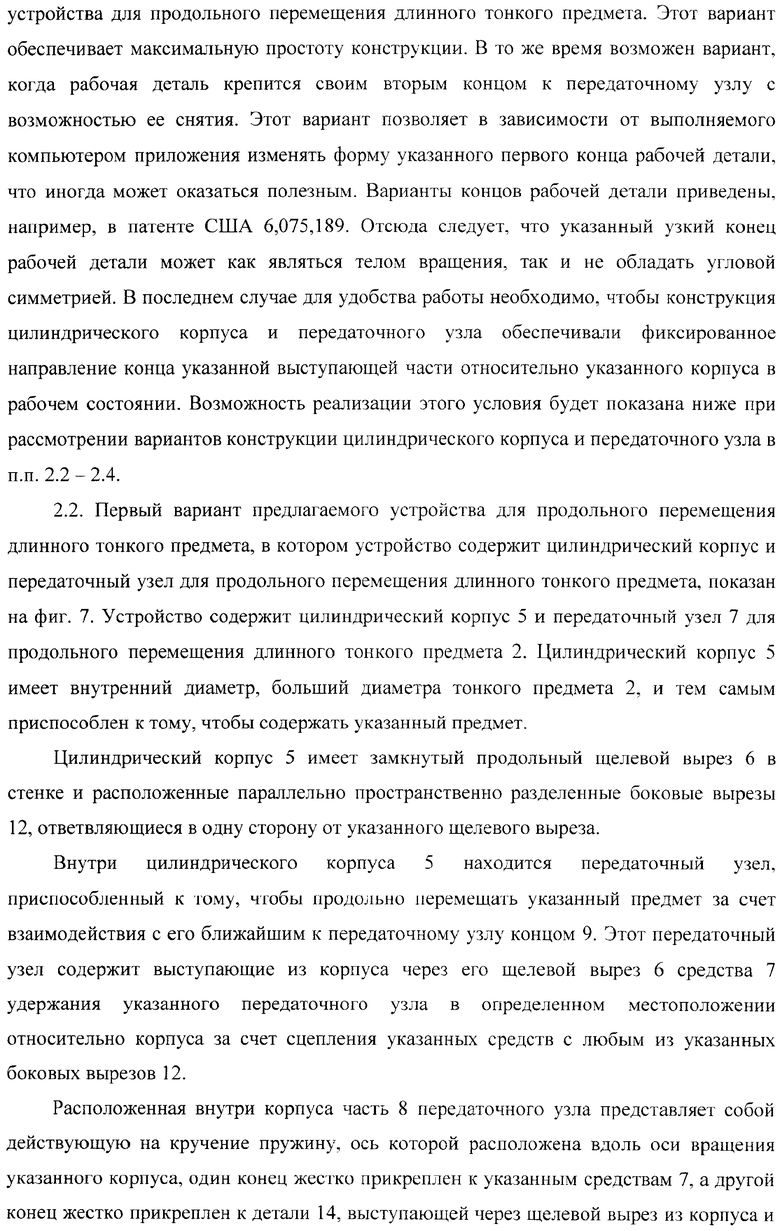
6. Приспособление для нажатия пальцем на органы управления электронного устройства, содержащее по крайней мере часть перчатки, надеваемую на дистальную фалангу пальца человека, рабочую деталь с узким концом из твердого материала, и средство фиксации рабочей детали в положении, когда она находится под указанным пальцем вблизи его конца и несколько выступает за его пределы, отличающееся тем, что указанное средство фиксации представляет собой устройство для продольного перемещения длинного тонкого предмета, содержащее цилиндрический корпус с продольным щелевым вырезом и передаточный узел, расположенный внутри указанного корпуса и имеющий выступающую часть, проходящую через указанный щелевой вырез в корпусе, причем второй конец рабочей детали прикреплен к передаточному узлу и имеет такую форму, чтобы он мог совершать скользящее перемещение в корпусе за счет перемещения его второго конца передаточным узлом, а цилиндрический корпус и передаточный узел обеспечивают возможность регулируемого перемещения передаточного узла за счет воздействия на его выступающую часть и надежную фиксацию положения передаточного узла в рабочем состоянии при отсутствии воздействия на выступающую часть передаточного узла, причем указанное устройство прикреплено вдоль образующей цилиндра к указанной части перчатки вдоль ее длины.
7. Приспособление по п.6, отличающееся тем, что указанным пальцем является большой палец.
8. Приспособление по п.6, отличающееся тем, что указанным пальцем является указательный палец.
9. Приспособление по п.6, отличающееся тем, что указанная часть перчатки является напальчником.
10. Приспособление по п.6, отличающееся тем, что указанная часть перчатки является целой перчаткой.
11. Приспособление по п.6, отличающееся тем, что передаточный узел и рабочая деталь составляют единое целое.
12. Приспособление по п.6, отличающееся тем, что рабочая деталь разборно крепится своим вторым концом к передаточному узлу.
13. Приспособление по п.6, отличающееся тем, что указанный узкий конец рабочей детали является телом вращения, ось которого совпадает с осью указанного цилиндрического корпуса.
14. Приспособление по п.6, отличающееся тем, что конструкция цилиндрического корпуса и передаточного узла обеспечивают фиксированное направление конца указанной выступающей части относительно указанного корпуса в рабочем состоянии.
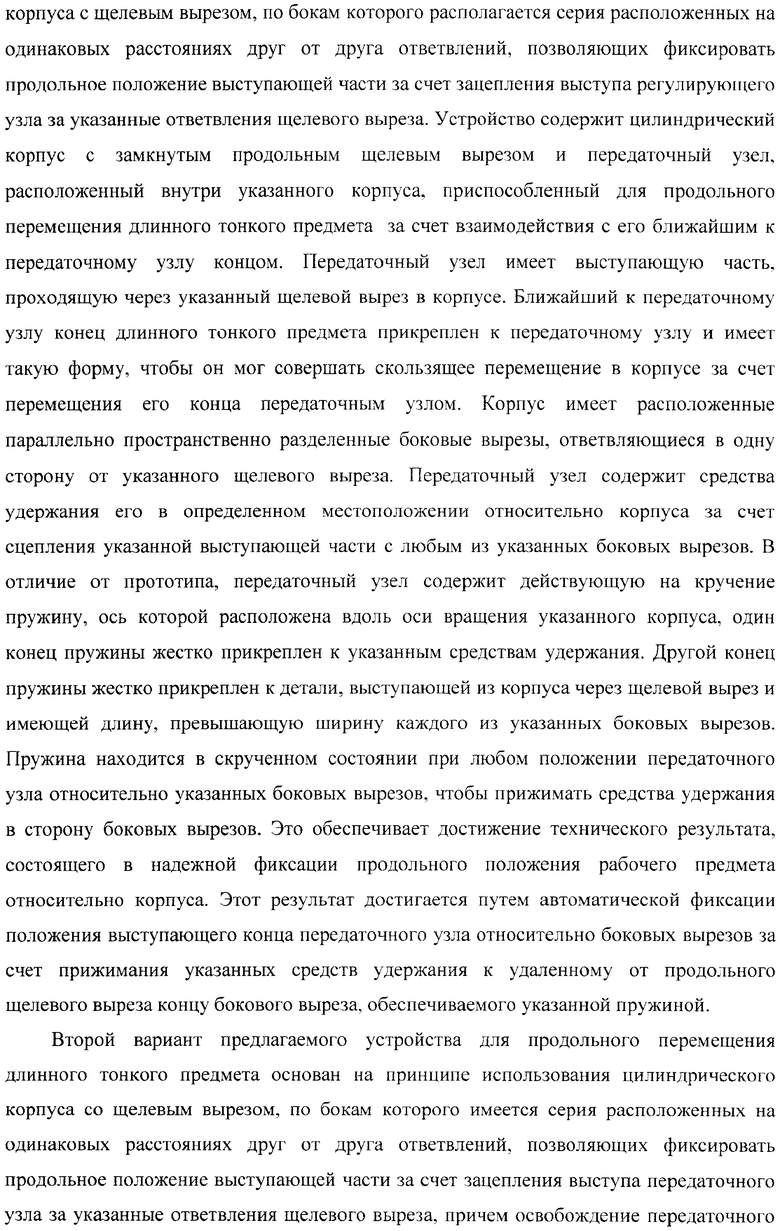
15. Устройство для продольного перемещения длинного тонкого предмета, содержащее цилиндрический корпус с замкнутым продольным щелевым вырезом и передаточный узел, расположенный внутри указанного корпуса, приспособленный для продольного перемещения указанного предмета за счет взаимодействия с его ближайшим к передаточному узлу концом и имеющий выступающую часть, проходящую через указанный щелевой вырез в корпусе, причем ближайший к передаточному узлу конец указанного длинного тонкого предмета прикреплен к передаточному узлу и имеет такую форму, чтобы он мог совершать скользящее перемещение в корпусе за счет перемещения его конца передаточным узлом, корпус имеет расположенные параллельно пространственно разделенные боковые вырезы, ответвляющиеся в одну сторону от указанного щелевого выреза, а передаточный узел содержит средства удержания его в определенном местоположении относительно корпуса за счет сцепления указанной выступающей части с любым из указанных боковых вырезов, отличающееся тем, что передаточный узел содержит действующую на кручение пружину, ось которой расположена вдоль оси вращения корпуса, один конец пружины жестко прикреплен к указанным средствам удержания, а другой ее конец жестко прикреплен к детали, выступающей из корпуса через указанный щелевой вырез и имеющей длину, превышающую ширину каждого из указанных боковых вырезов, причем пружина находится в скрученном состоянии при любом положении передаточного узла относительно указанных боковых вырезов, чтобы прижимать средства удержания в сторону боковых вырезов.
16. Устройство по п.15, отличающееся тем, что указанные пружина, деталь и средства удержания составляют единое целое.
17. Устройство по п.16, отличающееся тем, что указанные передаточный узел и длинный тонкий предмет составляют единое целое.
18. Устройство по п.16, отличающееся тем, что указанный длинный тонкий предмет разъемно крепится к указанному передаточному узлу.
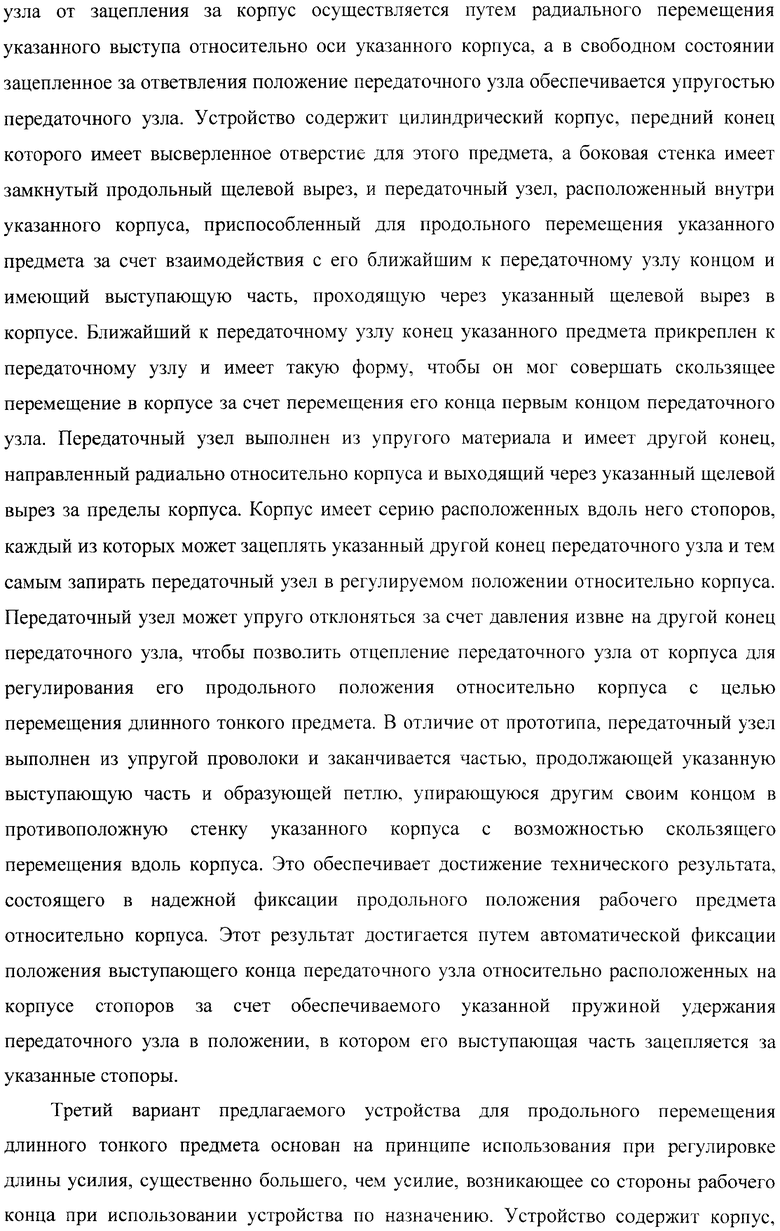
19. Устройство для продольного перемещения длинного тонкого предмета, содержащее цилиндрический корпус, передний конец которого имеет высверленное отверстие для этого предмета, а боковая стенка имеет замкнутый продольный щелевой вырез, и передаточный узел, расположенный внутри указанного корпуса, приспособленный для продольного перемещения указанного предмета за счет взаимодействия с его ближайшим к передаточному узлу концом и имеющий выступающую часть, проходящую через указанный щелевой вырез в корпусе, причем ближайший к передаточному узлу конец указанного предмета прикреплен к передаточному узлу и имеет такую форму, чтобы он мог совершать скользящее перемещение в корпусе за счет перемещения его конца первым концом передаточного узла, передаточный узел выполнен из упругого материала и имеет другой конец, направленный радиально относительно корпуса и выходящий через указанный щелевой вырез за пределы корпуса; корпус имеет серию расположенных вдоль него стопоров, каждый из которых может зацеплять указанный другой конец передаточного узла и тем самым запирать передаточный узел в регулируемом положении относительно корпуса; передаточный узел может упруго отклоняться за счет давления извне на указанный другой конец передаточного узла, чтобы позволить отцепление передаточного узла от корпуса для регулирования его продольного положения относительно корпуса с целью перемещения длинного тонкого предмета, отличающееся тем, что передаточный узел выполнен из упругой проволоки и заканчивается частью, продолжающей указанную выступающую часть и образующей петлю, упирающуюся своим концом в противоположную стенку корпуса с возможностью скользящего перемещения вдоль корпуса.
20. Устройство по п.19, отличающееся тем, что указанные передаточный узел и длинный тонкий предмет составляют единое целое.
21. Устройство по п.19, отличающееся тем, что указанный длинный тонкий предмет разъемно крепится к указанному передаточному узлу.
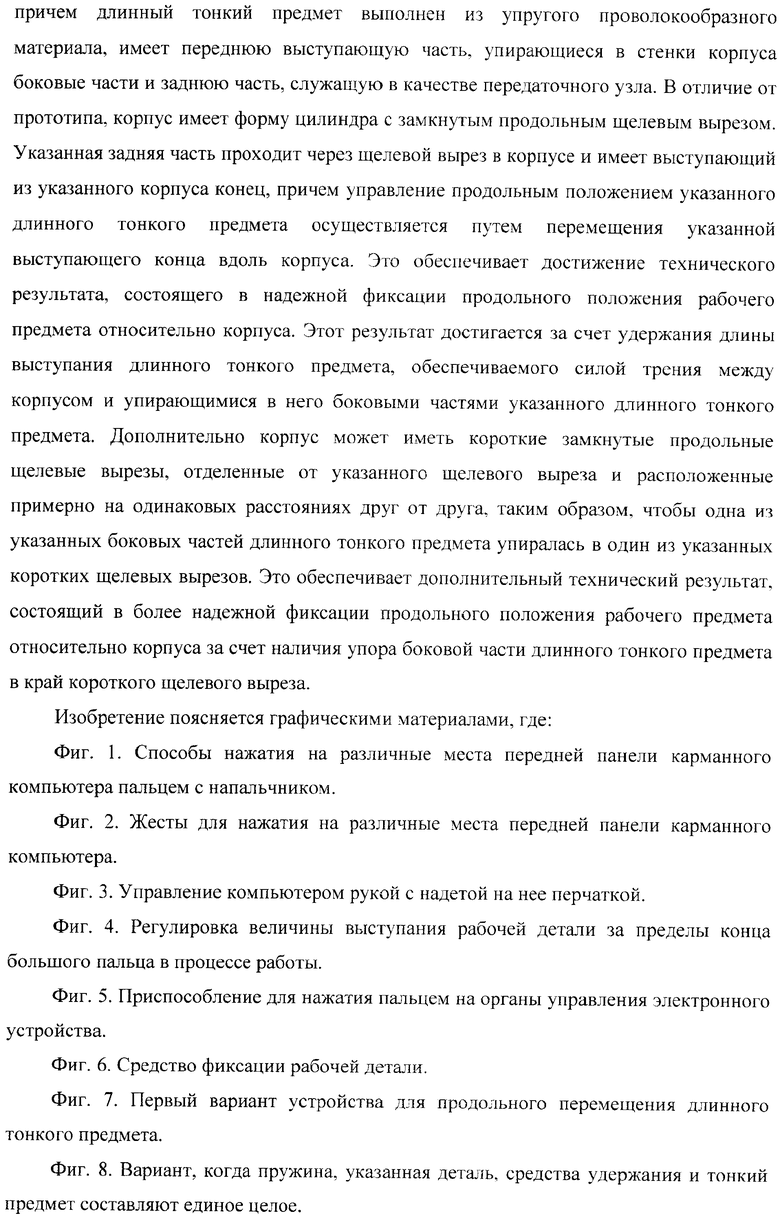
22. Устройство для продольного перемещения длинного тонкого предмета, содержащее корпус, причем длинный тонкий предмет выполнен из упругого проволокообразного материала, имеет переднюю выступающую часть, упирающиеся в стенки корпуса боковые части и заднюю часть, служащую в качестве передаточного узла, отличающееся тем, что корпус имеет форму цилиндра с замкнутым продольным щелевым вырезом, а указанная задняя часть длинного тонкого предмета проходит через щелевой вырез в корпусе и имеет выступающий из корпуса конец, причем управление продольным положением длинного тонкого предмета осуществляется путем перемещения указанного выступающего конца вдоль корпуса.
23. Устройство по п.22, отличающееся тем, что оно дополнительно содержит рабочую деталь, разъемно надеваемую на выступающий конец указанного длинного тонкого предмета.
24. Устройство по п.22, отличающееся тем, что корпус дополнительно имеет короткие замкнутые продольные щелевые вырезы, отделенные от указанного щелевого выреза и расположенные примерно на одинаковых расстояниях друг от друга, причем одна из указанных боковых частей длинного тонкого предмета упирается в один из указанных коротких щелевых вырезов.
| US 6225988 В1, 01.05.2001 | |||
| US 6075189 А, 13.06.2000 | |||
| СРЕДСТВО ДЛЯ ВВОДА СИМВОЛОВ ИЛИ КОМАНД В КОМПЬЮТЕР | 1998 |
|
RU2236036C2 |
| НАРУЧНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ РАБОТЫ С КОМПЬЮТЕРНЫМ МАНИПУЛЯТОРОМ ТИПА "МЫШЬ" | 2005 |
|
RU2294557C1 |

